
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (3): 737-750.doi: 10.12305/j.issn.1001-506X.2026.03.01
• 电子技术 •
程鲲1,2, 雷洪涛1,*, 吕志轩2
收稿日期:2024-12-17
出版日期:2026-03-25
发布日期:2026-04-13
通讯作者:
雷洪涛
作者简介:程 鲲(1987—),男,工程师,硕士研究生,主要研究方向为人工智能与大数据、航天测量与指挥控制基金资助:Kun CHENG1,2, Hongtao LEI1,*, Zhixuan LYU2
Received:2024-12-17
Online:2026-03-25
Published:2026-04-13
Contact:
Hongtao LEI
摘要:
现有无人机跟踪方法存在对远距离无人机检测精度较低、参数量大难以实时跟踪、目标易丢失的问题。因此,提出一种基于改进YOLOv8(you only look once version 8)的轻量级无人机跟踪方法。针对现有方法对远距离无人机检测精度较低的问题,以YOLOv8为基线模型,替换网络结构中原始卷积模块为空间到深度分组的卷积,在降低网络参数的基础上提高模型对小目标的特征提取能力。针对模型参数量大导致模型难以实时跟踪的问题,设计一种深度可分离混洗网络结构作为模型主干网络,在保证检测精度的同时缩减模型参数量。针对普通跟踪模型跟踪易丢失的问题,结合改进检测模型与ByteTrack算法提高对复杂环境下无人机的跟踪性能。在Real World数据集上对跟踪方法进行验证,相较基线模型,改进无人机检测模型的检测精度提高1.6%,召回率提高0.8%,F1度量值提高0.2,平均检测精度提高0.5%,参数量减小0.2×106,证明模型有较好的检测精度和实时性。对无人机飞行视频进行跟踪测试,结果表明所提方法对无人机跟踪有较好的性能。
中图分类号:
程鲲, 雷洪涛, 吕志轩. 改进YOLOv8的轻量级无人机跟踪方法[J]. 系统工程与电子技术, 2026, 48(3): 737-750.
Kun CHENG, Hongtao LEI, Zhixuan LYU. Lightweight unmanned aerial vehicle tracking method of improved YOLOv8[J]. Systems Engineering and Electronics, 2026, 48(3): 737-750.
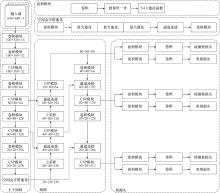
图1
YOLOv8网络结构"
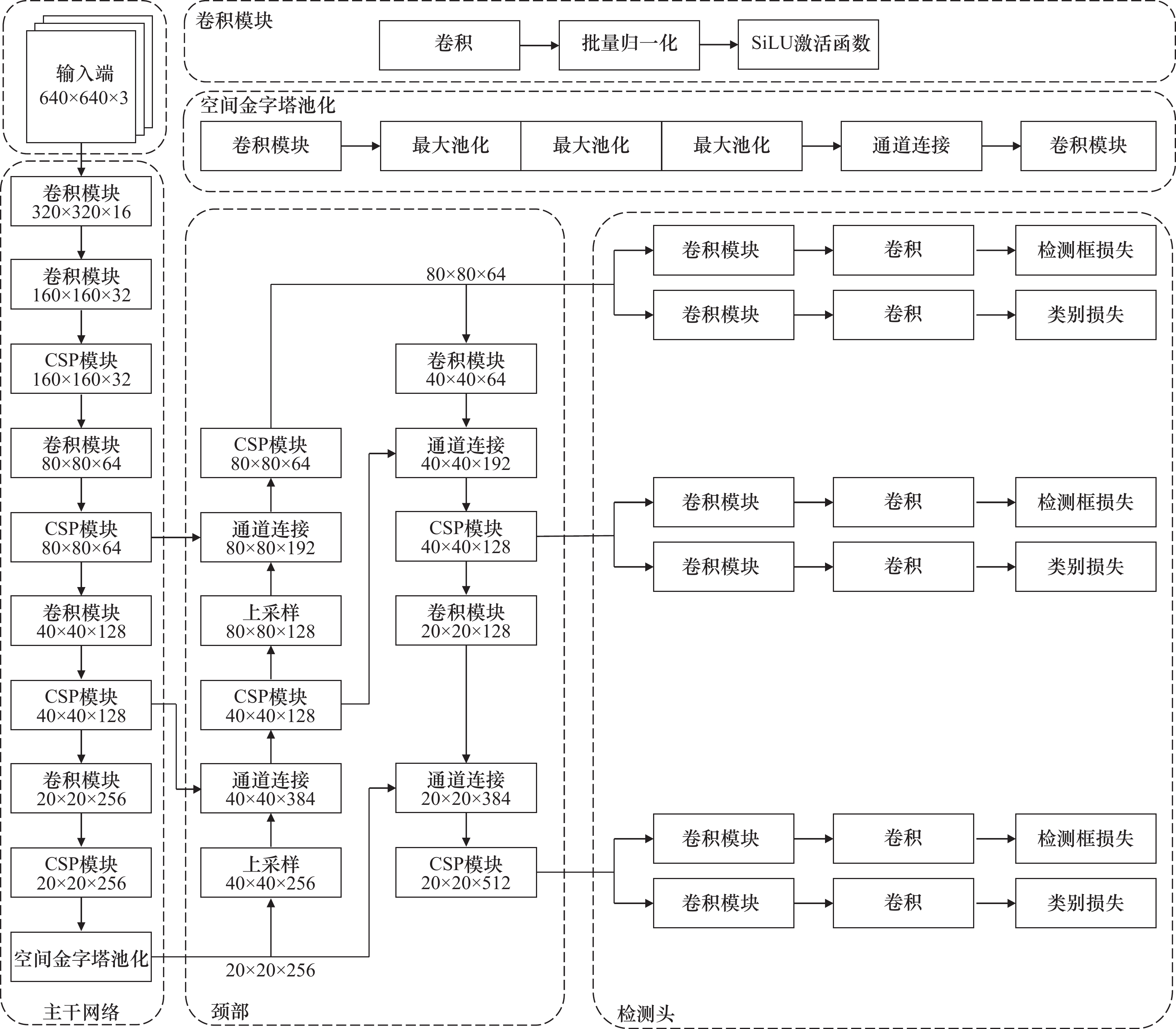
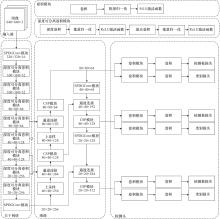
图2
改进YOLOv8网络结构"
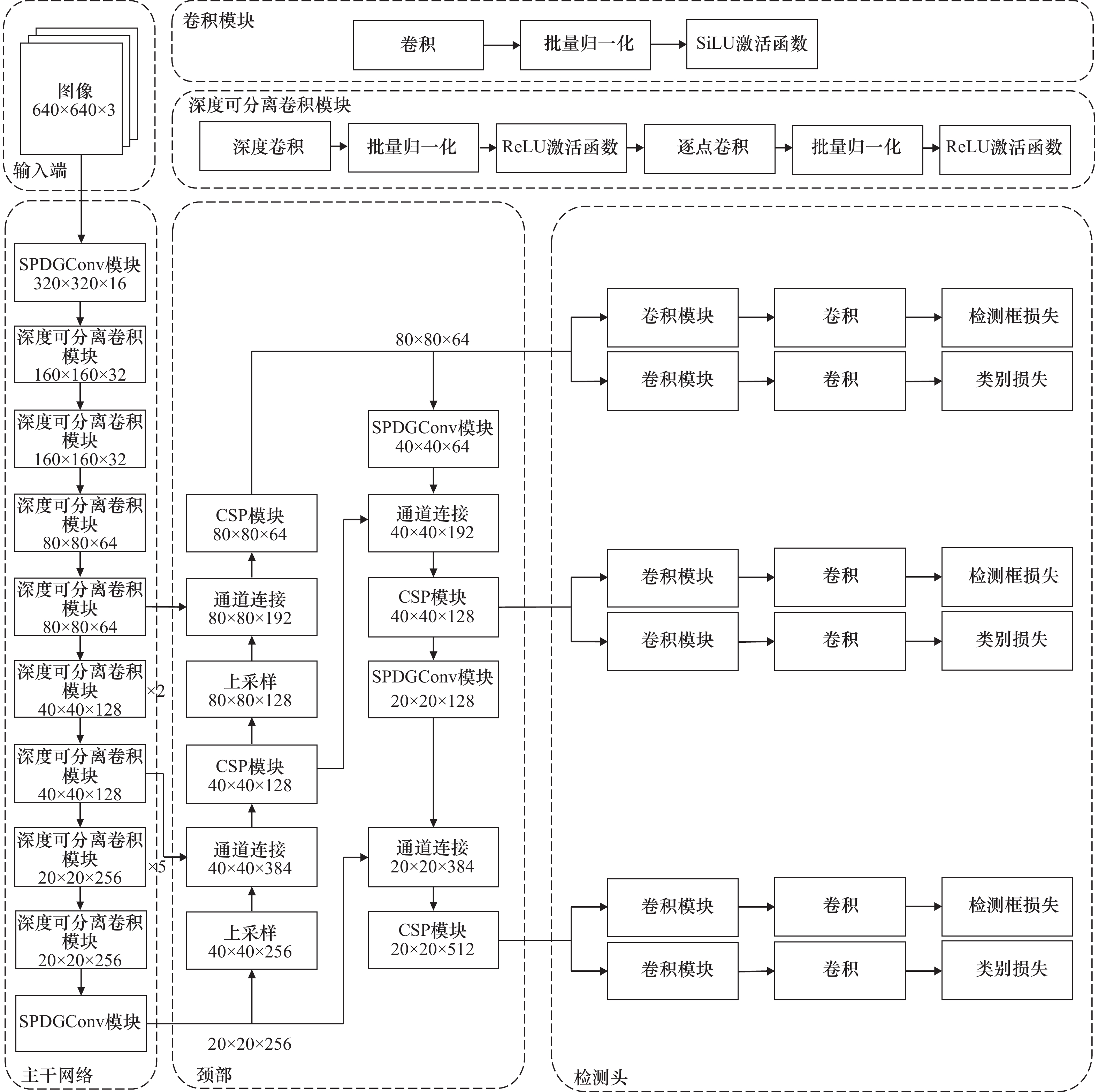

图3
SPDGConv模块结构"
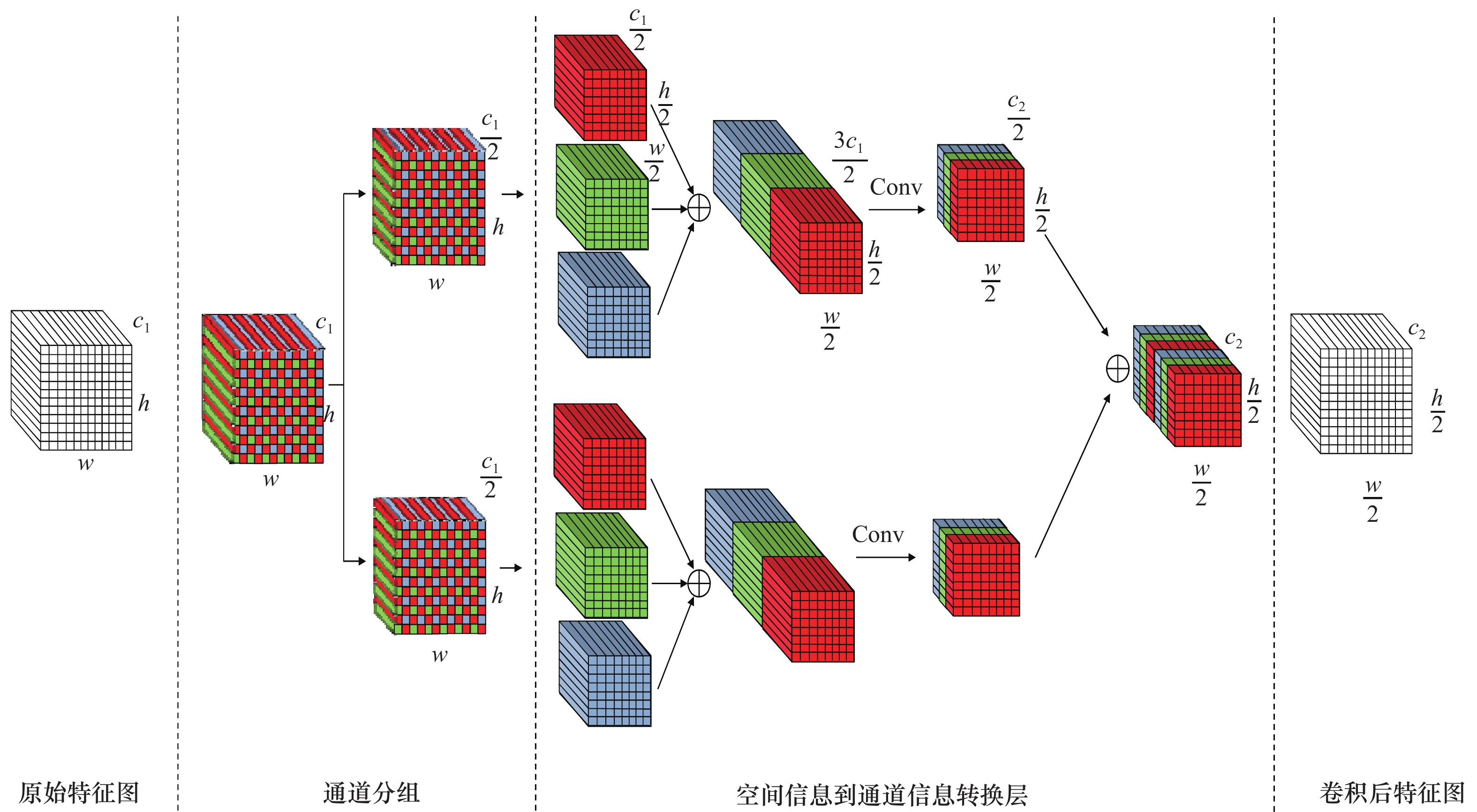
图4
DSCModule结构"
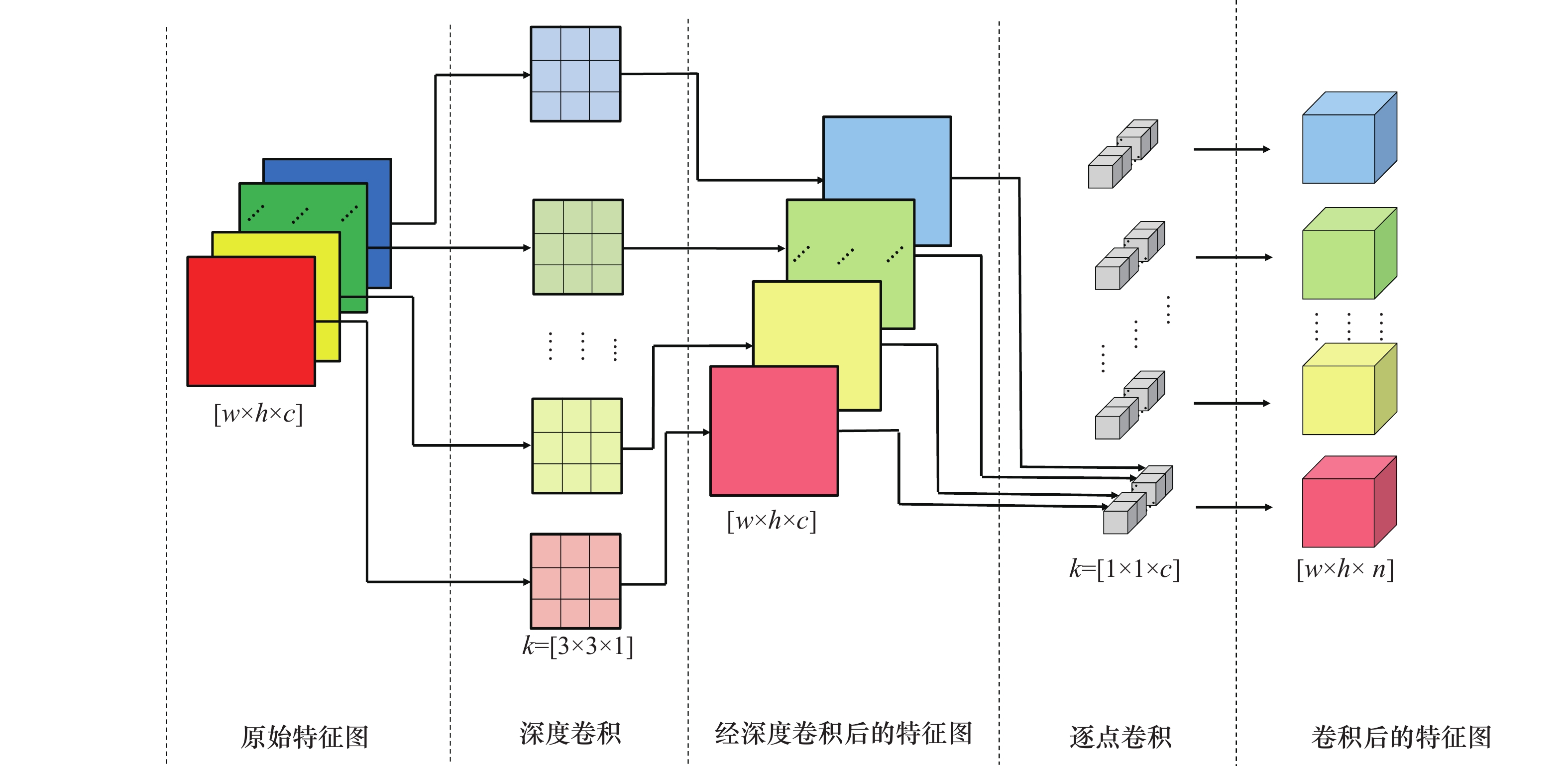
图5
改进后DSCModule结构"
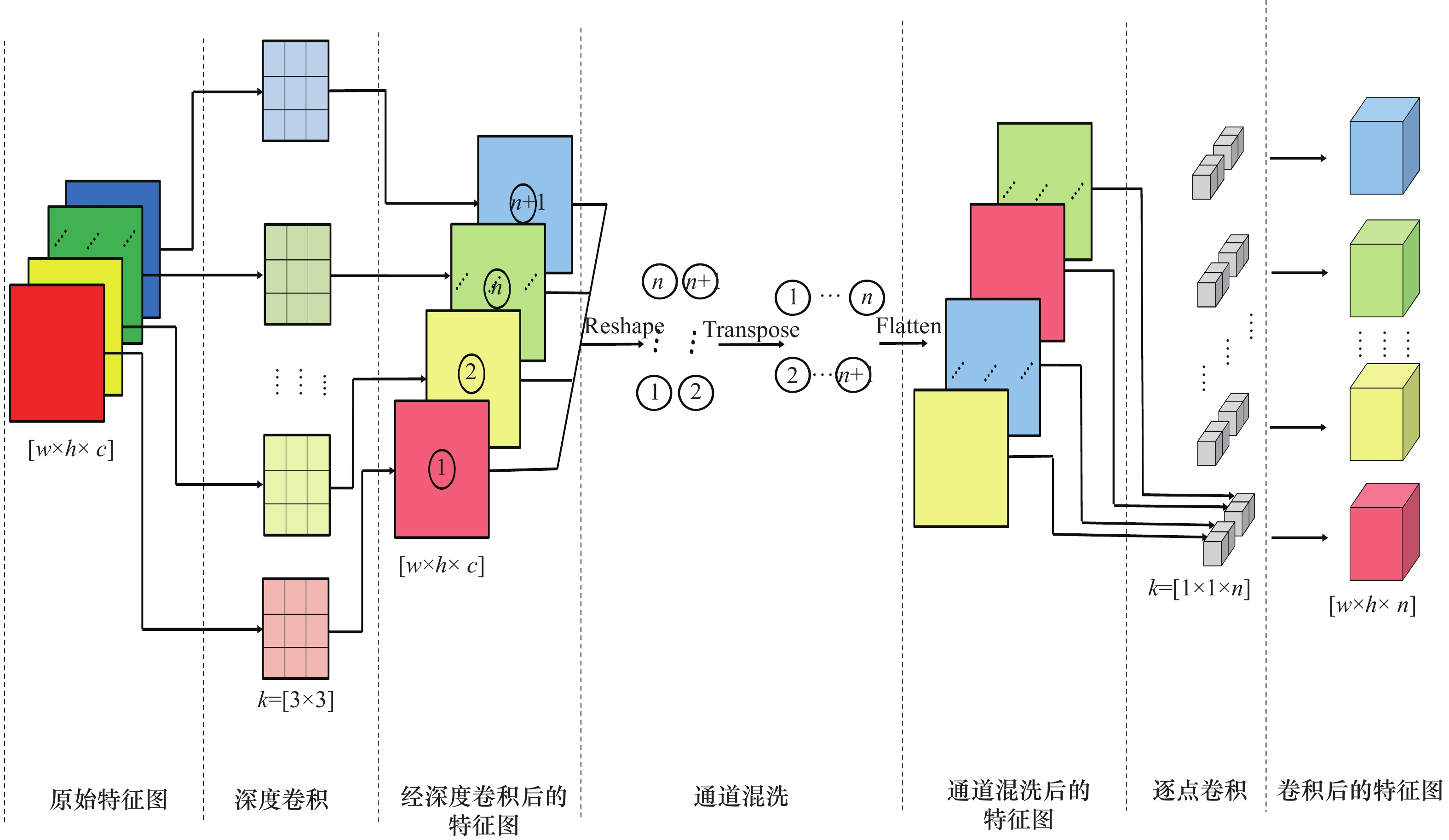
图6
ByteTrack算法流程"
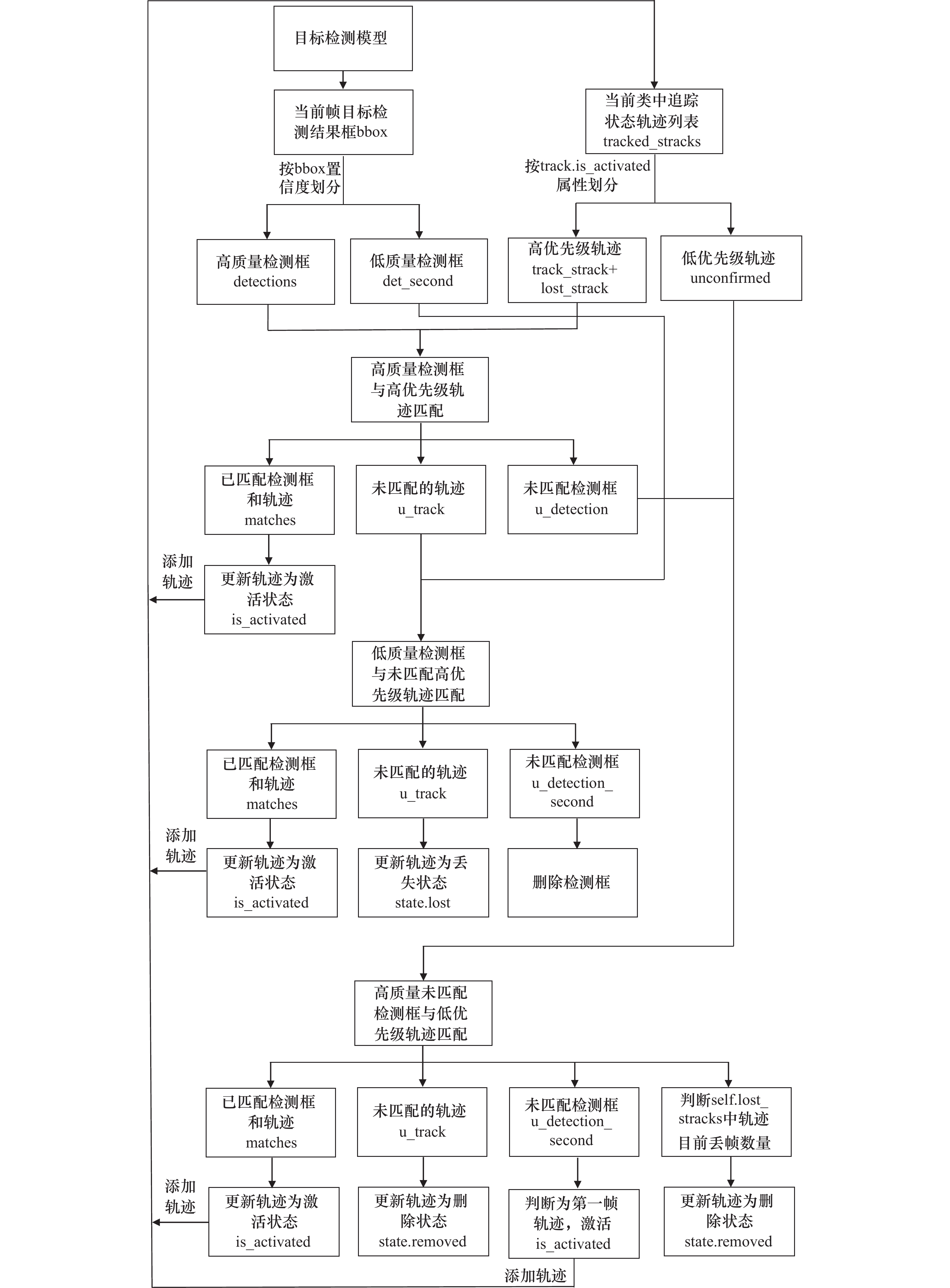
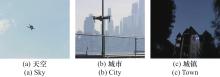
图7
部分实验数据"
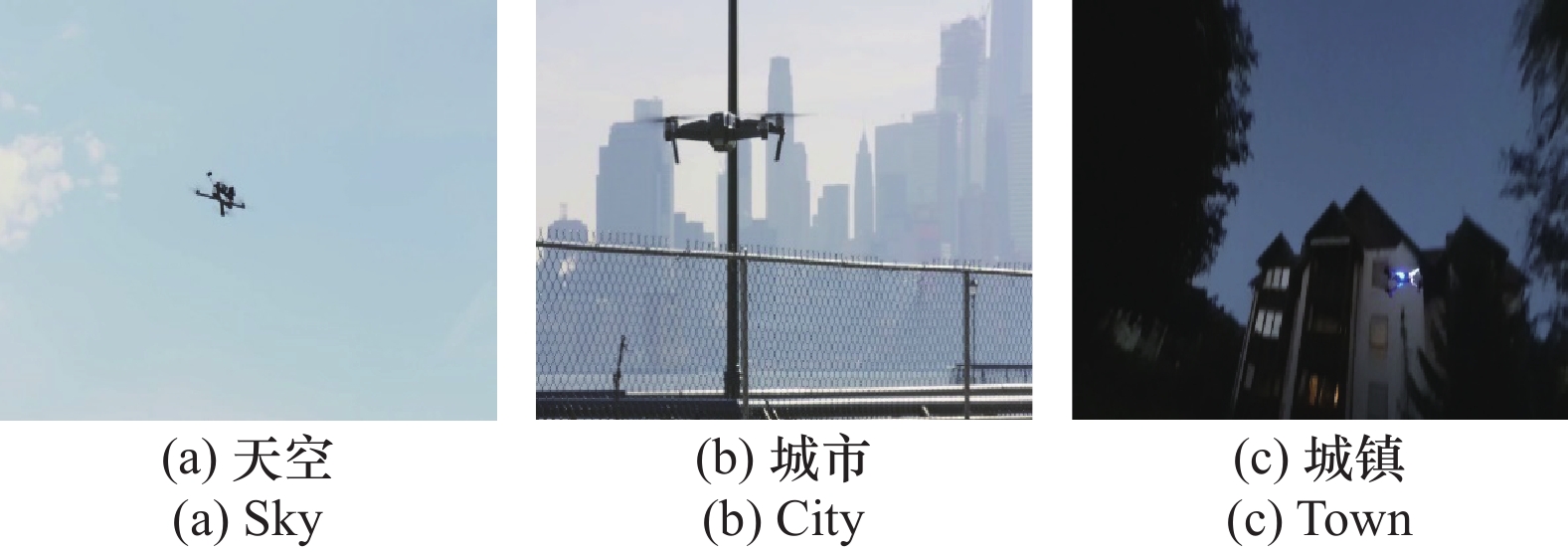
表1
实验环境参数"
| 名称 | 配置 |
| CPU | AMD EPYC |
| GPU | NVIDIA GeForce RTX |
| Anaconda | 23.7.4 |
| 最高CUDA版本 | 12.2 |
表2
模型训练参数"
| 参数名 | 取值 |
| 训练轮次 | 50 |
| 批量大小 | 4 |
| 图片尺寸 | 512×512 |
| 初始学习率 | 0.01 |
| 梯度动量 | 0.937 |
| 随机种子 | 0 |
图8
训练过程中指标变化"
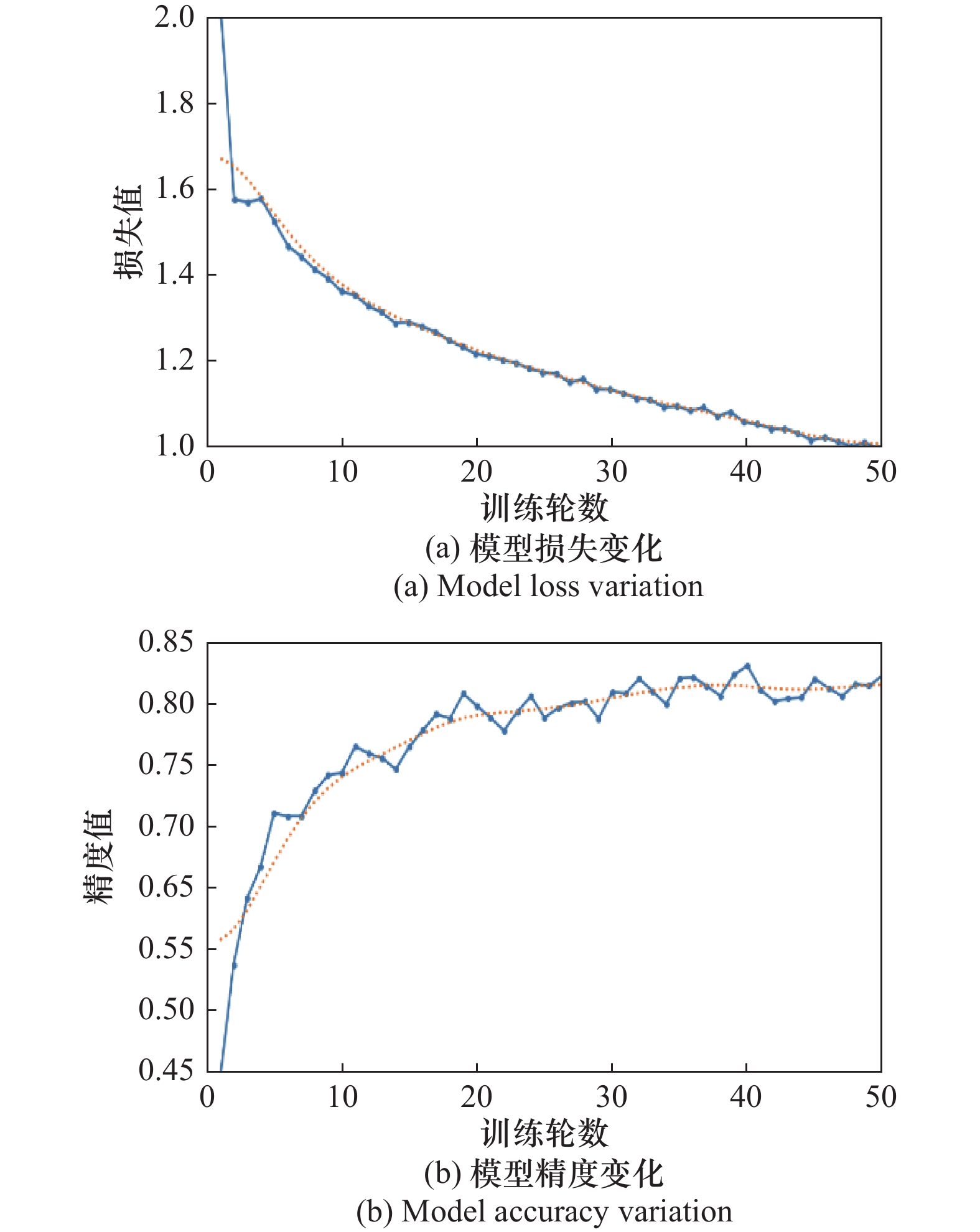
表3
消融实验结果"
| 方法 | 检测精度/% | 召回率/% | F1 | mAP50/% | FPS | 参数量(×106) |
| YOLOv8-n | 84.7 | 74.9 | 0.79 | 84.5 | 137.1 | 6.0 |
| YOLOv8-n+SPDGConv | 83.5 | 73.1 | 0.78 | 81.4 | 130.1 | 5.1 |
| YOLOv8-n+MSNet | 87.9 | 72.8 | 0.80 | 82.7 | 135.6 | 8.8 |
| 本文算法 | 86.3 | 75.7 | 0.81 | 85.0 | 146.3 | 5.8 |
表4
对比实验结果"
| 方法 | 检测精度/% | 召回率/% | F1 | mAP50/% | FPS | 参数量(×106) |
| ShuffleNet | 81.7 | 70.0 | 0.75 | 77.5 | 63.7 | 12.2 |
| MobileNet | 84.0 | 72.0 | 0.78 | 79.6 | 125.4 | 11.8 |
| YOLOv3-tiny | 79.1 | 67.1 | 0.73 | 76.0 | 229.2 | 23.2 |
| YOLOv5-s | 82.8 | 69.9 | 0.76 | 78.9 | 131.5 | 5.0 |
| 本文算法 | 86.3 | 75.7 | 0.81 | 85.0 | 146.3 | 5.8 |
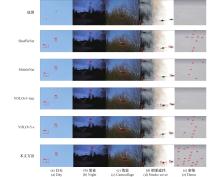
图9
不同模型检测对比结果"

表5
与现有模型对比实验结果"
| 方法 | mAP50/% | mAP50:95/% | 每秒浮点 运算次数 | 参数量(×106) |
| Faster-RCNN | 47.8 | 10.7 | 401 | 136.7 |
| CSAM-YOLOv7 | 84.6 | 30.5 | 122.3 | 38.2 |
| SPD-YOLOv7 | 96.5 | 37.8 | 119.5 | 41.6 |
| 本文方法 | 86.3 | 31.3 | 9.0 | 5.8 |
表6
不同PSNR下模型检测结果"
| 信噪比/dB | 测试结果 |
| 无噪声 PSNR>50 |  |
| 30<PSNR<35 |  |
| 25<PSNR<30 |  |
| 20<PSNR<25 |  |
| 15<PSNR<20 |  |
表7
模型跟踪结果"
| 视频帧数/帧 | 测试结果 |
| 1~5 |  |
| 61~65 |  |
| 121~125 |  |
| 181~185 |  |
| 235~240 |  |
| 1 | 李江涛, 史慧. 浅谈无人机技术智能化应用及展望[J]. 中国设备工程, 2022, 11(4): 31−32. |
| LI J T, SHI H. On the intelligent application and prospect of UAV technology[J]. China Plant Engineering, 2022, 11(4): 31−32. | |
| 2 | 喻煌超, 牛轶峰, 王祥科. 无人机系统发展阶段和智能化趋势[J]. 国防科技, 2021, 42 (3): 18- 24. |
| YU H C, NIU Y F, WANG X K. Development stage and intelligent trend of UAV system[J]. National Defense Technology, 2021, 42 (3): 18- 24. | |
| 3 |
VLADIK K, BORIS K. Visual knowledge discovery and machine learning[J]. Journal of Intelligent & Fuzzy Systems, 2021, 40 (3): 5753- 5755.
doi: 10.1007/978-3-031-24628-9_39 |
| 4 |
ZHONG Q Z, PENG Z, SHOU T X, et al. Object detection with deep learning: a review[J]. IEEE Trans. on Neural Networks and Learning Systems, 2019, 30 (11): 3212- 3232.
doi: 10.1109/TNNLS.2018.2876865 |
| 5 | BU L R, RAO B, SONG D. A group target track-before-detect approach using two-stage strategy with maximum-likelihood probabilistic data association[J]. IET Radar, Sonar & Navigation, 2024, 18(8): 1351−1363. |
| 6 |
KIM Y B. Robust selective search[J]. ACM SIGIR Forum, 2019, 52 (2): 170- 171.
doi: 10.1145/3308774.3308803 |
| 7 |
ZHOU Q, ZOU Q H, GAO X L, et al. Low-resolution periocular images recognition using a novel CNN network[J]. Signal, Image and Video Processing, 2024, 18 (10): 7319- 7331.
doi: 10.1007/s11760-024-03396-7 |
| 8 | ALHUSSAN A, TALAAT F, KENAWY E S E, et al. Facial expression recognition model depending on optimized support vector machine[J]. Computers, Materials & Continua, 2023, 76(1): 499−515. |
| 9 |
YOUNGSHIN L, WONHYUNG P. Diagnosis of depressive disorder model on facial expression based on fast R-CNN[J]. Diagnositics, 2022, 12 (2): 317- 327.
doi: 10.3390/diagnostics12020317 |
| 10 |
胡昭华, 王长富. 改进Faster R-CNN的遥感目标小目标检测算法[J]. 计算机工程与科学, 2024, 46 (6): 1063- 1071.
doi: 10.3969/j.issn.1007-130X.2024.06.013 |
|
HU S H, WANG C F. Improved small object detection algorithm for remote sensing image of faster R-CNN[J]. Computer Engineering & Science, 2024, 46 (6): 1063- 1071.
doi: 10.3969/j.issn.1007-130X.2024.06.013 |
|
| 11 | GUAN S X, DONG S, GAO Y F, et al. Category-related attention domain adaptation for one-stage cross-domain object detection[J]. IET Image Processing, 2023, 18 (2): 362- 378. |
| 12 |
孟庆春. 一种基于深度网络的显著性目标检测算法[J]. 计算机应用与软件, 2021, 38 (10): 196- 200.
doi: 10.3969/j.issn.1000-386x.2021.10.031 |
|
MENG Q C. A saliency object detection algorithm based on a deep network[J]. Computer Applications and Software, 2021, 38 (10): 196- 200.
doi: 10.3969/j.issn.1000-386x.2021.10.031 |
|
| 13 | JOSEPH R, SANTOSH D, ROSS G, et al. You only look once: unified, real-time object detection[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 779−788. |
| 14 |
SU R X, YUE J, LI Z Z, et al. Detection and counting method of juvenile abalones based on improved SSD network[J]. Information Processing in Agriculture, 2024, 11 (3): 325- 336.
doi: 10.1016/j.inpa.2023.03.002 |
| 15 |
HUSSEN N, SALEM M, ELDESOUKY I A, et al. Real-time drone detection framework based on advanced texture feature extraction and pattern recognition model using GUI[J]. Neural Computing and Applications, 2024, 37 (5): 3435- 3454.
doi: 10.1007/s00521-024-10440-7 |
| 16 |
蒋兆军, 成孝刚, 彭雅琴, 等. 基于深度学习的无人机识别算法研究[J]. 电子技术应用, 2017, 43 (7): 84- 87.
doi: 10.16157/j.issn.0258-7998.2017.07.022 |
|
JIANG Z J, CHENG X G, PENG Y Q, et al. A novel UAV recognition algorithm based on deep learning approach[J]. Application of Electronic Technique, 2017, 43 (7): 84- 87.
doi: 10.16157/j.issn.0258-7998.2017.07.022 |
|
| 17 | ASHRAF M W, SULTANI W, SHAH M. Dogfight: detecting drones from drones videos[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 7067−7076. |
| 18 | IHEKORONYE V U, AJAKWE S O, KIM D S, et al. Aerial supervision of drones and other flying objects using convolutional neural networks[C]//Proc. of the International Conference on Artificial Intelligence in Information and Communication, 2022: 69−74. |
| 19 |
LIU S X Y, LI G T, ZHAN Y F, et al. MUSAK: a multi-scale space kinematic method for drone detection[J]. Remote Sensing, 2022, 14 (6): 1434.
doi: 10.3390/rs14061434 |
| 20 | 赵青, 察豪, 牟伟琦, 等. 一种基于改进YOLOv7的无人机多目标光学检测方法[J]. 电讯技术, 2024, 64 (8): 1213- 1218. |
| ZHAO Q, CHA H, MOU W Q, et al. A multi-target optical detection method for UAV based on improved YOLOv7[J]. Telecommunication Engineering, 2024, 64 (8): 1213- 1218. | |
| 21 |
刘丽, 张硕, 白宇昂, 等. 改进YOLOv8的轻量级军事飞机检测算法[J]. 计算机工程与应用, 2024, 60 (18): 114- 125.
doi: 10.3778/j.issn.1002-8331.2404-0058 |
|
LIU L, ZHANG S, BAI Y A, et al. Improved the YOLOv8 lightweight military aircraft detection algorithm[J]. Computer Engineering and Applications, 2024, 60 (18): 114- 125.
doi: 10.3778/j.issn.1002-8331.2404-0058 |
|
| 22 | 薛俊裙, 马若寒, 胡超芳. 基于MobileNet的多日标跟踪深度学习算法[J]. 控制与决策, 2021, 36 (8): 1991- 1996. |
| XUE J Q, MA R H, HU C F. Deep learning algorithm for multiple objective tracking based on MobileNet[J]. Control and Decision, 2021, 36 (8): 1991- 1996. | |
| 23 | 杨珍, 吴珊丹, 贾加. 结合改进ShuffleNet-V2和注意力机制的无人机图像白主分类预警框架[J]. 无线电工程, 2024, 54 (5): 1261- 1269. |
| YANG Z, WU S D, JIA J. UAV image autonomous classification early warning framework combined with improved ShuffleNet-V2 and attention mechanism[J]. Radio Engineering, 2024, 54 (5): 1261- 1269. | |
| 24 |
YOU L X, CHEN Y J, XIAO C, et al. Multi-object vehicle detection and tracking algorithm based on improved YOLOv8 and ByteTrack[J]. Electronics, 2024, 13 (15): 3033- 3043.
doi: 10.3390/electronics13153033 |
| 25 |
FANG B. Vehicle rear end collision warning method based on MeanShift and Kalman filter tacking[J]. International Journal of Vehicle Design, 2024, 95 (1/2): 1- 21.
doi: 10.1504/ijvd.2023.10060016 |
| 26 | ZHIYU Z Y, KANG L, GE H L, et al. Infrared target detection based on Gaussian model and Hungarian algorithm[J] Enterprise Information Systems, 2022, 16(10/11): 1573−1586. |
| 27 |
马鸽, 李洪伟, 严梓维, 等. 基于多注意力的改进YOLOv5s小目标检测算法[J]. 工程科学学报, 2024, 46 (9): 1647- 1658.
doi: 10.13374/j.issn2095-9389.2024.01.18.003 |
|
MA G, LI H W, YAN Z W, et al. Improved YOLOv5s small object detection algorithm based on multiple attention[J]. Chinese Journal of Engineering, 2024, 46 (9): 1647- 1658.
doi: 10.13374/j.issn2095-9389.2024.01.18.003 |
|
| 28 |
王文亮, 李延祥, 张一帆, 等. MPANet-YOLOv5: 多路径聚合网络复杂海域目标检测[J]. 湖南大学学报(自然科学版), 2022, 49 (10): 69- 76.
doi: 10.16339/j.cnki.hdxbzkb.2022360 |
|
WANG W L, LI Y X, ZHANG Y F, et al. MPANet-YOLOv5: complex sea area object detection in a mati-path aggregation network[J]. Journal of Human University (Natural Sciences), 2022, 49 (10): 69- 76.
doi: 10.16339/j.cnki.hdxbzkb.2022360 |
|
| 29 |
张善文, 许新华, 齐国红. 基于空洞空间金字塔池化U-Net的遥感图像多目标检测方法[J]. 弹箭与制导学报, 2023, 43 (5): 1- 8.
doi: 10.15892/j.cnki.djzdxb.2023.05.001 |
|
ZHNG S W, XU X H, QI G H. A mult-object detection method for remote sensing images based on U-Net[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2023, 43 (5): 1- 8.
doi: 10.15892/j.cnki.djzdxb.2023.05.001 |
|
| 30 |
PAWELCZYK M L, WOJTYRA M. Real world object detection dataset for quadcopter unmanned aerial vehicle detection[J]. IEEE Access, 2020, 8, 174394- 174409.
doi: 10.1109/ACCESS.2020.3026192 |
| 31 | 崔勇强, 李嘉轩, 侯林果, 等. 改进YOLOv7的城市小型无人机目标检测方法[J]. 计算机工程与应用, 2024, 60 (10): 237- 245. |
| CUI Y Q, LI J X, HOU L G, et al. Improved YOLOv7 target detection method for small urban UAVs[J]. Computer Engineering and Applications, 2024, 60 (10): 237- 245. |
| [1] | 缪燕子, 赵志非, 吴巍. 基于代价敏感学习DBN-XGBoost的海面小目标检测方法研究[J]. 系统工程与电子技术, 2026, 48(2): 402-409. |
| [2] | 陈凯, 赵永波, 刘仍莉, 邓海涛, 孙龙. 机载长合成孔径时间海面运动舰船高分辨SAR成像算法[J]. 系统工程与电子技术, 2026, 48(2): 456-465. |
| [3] | 包玉刚, 贾皓翔, 赵旦峰. 基于高阶递归网络的单幅图像去雨滴模型[J]. 系统工程与电子技术, 2026, 48(1): 12-21. |
| [4] | 丁昊, 韦继丰, 董云龙, 曹政, 于恒力. 高海况下应用先验信息的海上小目标检测方法[J]. 系统工程与电子技术, 2026, 48(1): 44-55. |
| [5] | 陈海青, 汪刘应, 刘顾, 王龙, 葛超群, 陈孟州. 合成孔径雷达图像去噪算法研究进展[J]. 系统工程与电子技术, 2026, 48(1): 94-105. |
| [6] | 李翠芸, 赵泽宇, 张双武. 重尾噪声环境下的自适应TPMBM滤波器[J]. 系统工程与电子技术, 2025, 47(9): 2808-2817. |
| [7] | 傅嘉政, 郭玉霞, 张博祥, 柴雷, 易伟, 孔令讲. 基于TPHD与TCPHD滤波器的分布式多目标跟踪方法[J]. 系统工程与电子技术, 2025, 47(9): 2828-2838. |
| [8] | 李开明, 张袁鹏, 罗迎, 代肖楠. 弹道导弹雷达目标识别研究进展[J]. 系统工程与电子技术, 2025, 47(9): 2870-2889. |
| [9] | 季策, 马相宇, 牟晓宇, 赵家毅. TS-GRU-VTA:基于深度学习的车辆信道估计方案[J]. 系统工程与电子技术, 2025, 47(9): 3093-3098. |
| [10] | 蓝舒尧, 李宇, 张春华, 迟骋, 陈春辉. 垂直阵分集束控影区探测信号发射策略[J]. 系统工程与电子技术, 2025, 47(8): 2454-2462. |
| [11] | 于营, 王春平, 徐金辉, 吕述杭, 付强, 陈明. PE-Net:一种优化剪枝的实时山体滑坡检测网络[J]. 系统工程与电子技术, 2025, 47(8): 2475-2485. |
| [12] | 罗颖聪, 张磊, 魏少鹏, 孟智超. 联合失配滤波器的近区低旁瓣混沌波形设计算法[J]. 系统工程与电子技术, 2025, 47(8): 2511-2518. |
| [13] | 付卫红, 彭文洪, 刘乃安. 混合注意力优化的SAR图像小目标检测方法[J]. 系统工程与电子技术, 2025, 47(8): 2519-2526. |
| [14] | 倪康, 贾文杰, 邹旻瑞, 郑志忠. 基于动态聚合网络的SAR目标检测[J]. 系统工程与电子技术, 2025, 47(8): 2527-2539. |
| [15] | 马晓萌, 邓东明, 沈永健, 丁金闪, 郝国卿. 基于单站无源运动定位的多目标跟踪方法[J]. 系统工程与电子技术, 2025, 47(8): 2549-2557. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||