Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (2): 603-611.doi: 10.12305/j.issn.1001-506X.2022.02.30
• Guidance, Navigation and Control • Previous Articles Next Articles
UAV offline path planning based on self-adaptive coyote optimization algorithm
Dou CHEN*, Xiuyun MENG
- School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China
-
Received:2021-04-19Online:2022-02-18Published:2022-02-24 -
Contact:Dou CHEN
CLC Number:
Cite this article
Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm[J]. Systems Engineering and Electronics, 2022, 44(2): 603-611.
share this article

Fig.1
Initialization of offline path planning"
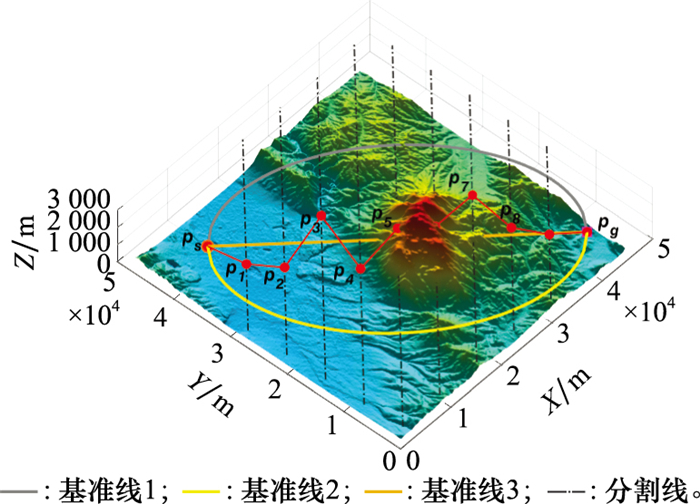
Table 1
Performance comparison between SACOA and other algorithms on the CEC2017 test function"
| 函数 | SACOA | COA | PSO | GA | GWO | |
| F1 | Mean | 1.093 443E-07 | 2.485 612E-12 | 1.773 076E+08 | 5.930 584E+06 | 9.158 465E+09 |
| Std.Dev | 1.320 844E-07 | 1.948 230E-12 | 1.267 548E+08 | 7.074 796E+05 | 1.421 094E+09 | |
| Rank | 2 | 1 | 4 | 3 | 5 | |
| F2 | Mean | 2.329 923E+05 | 7.001 276E+04 | 4.362 386E+03 | 1.014 008E+05 | 1.114 722E+05 |
| Std.Dev | 3.497 036E+04 | 1.473 092E+04 | 7.693 032E+02 | 1.518 693E+04 | 5.754 088E+03 | |
| Rank | 4 | 2 | 1 | 3 | 5 | |
| F3 | Mean | 2.630 489E+05 | 8.681 174E+04 | 5.159 271E+03 | 3.217 473E+05 | 1.019 149E+05 |
| Std.Dev | 8.111 693E+04 | 2.599 363E+04 | 5.820 278E+02 | 2.583 825E+04 | 9.335 723E+03 | |
| Rank | 3 | 2 | 1 | 4 | 5 | |
| F4 | Mean | 1.179 824E-04 | 3.382 375E-4 | 1.876 899E+02 | 4.625 093E+01 | 1.490 700E+03 |
| Std.Dev | 8.905 905E-05 | 3.174 470E-4 | 4.893 446E+01 | 3.863 320E+01 | 3.241 449E+02 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F5 | Mean | 2.466 655E+01 | 4.576 807E+01 | 2.159 181E+02 | 1.374 260E+02 | 2.940 587E+02 |
| Std.Dev | 3.125 048E+00 | 9.738 384E+00 | 1.251 324E+01 | 2.091 182E+01 | 1.957 262E+01 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F6 | Mean | 6.691 720E-06 | 4.609 741E-03 | 2.132 414E-03 | 7.394 889E-06 | 1.085 735E-02 |
| Std.Dev | 6.480 619E-06 | 5.419 744E-03 | 9.595 713E-04 | 6.63017 6E-06 | 2.799 322E-03 | |
| Rank | 1 | 4 | 3 | 2 | 5 | |
| F7 | Mean | 9.534 854E+01 | 1.477 339E+02 | 3.796 905E+02 | 7.519 979E+02 | 6.151 016E+02 |
| Std.Dev | 9.397 924E+01 | 2.456 029E+01 | 1.110 813E+01 | 1.028 961E+02 | 3.396 531E+01 | |
| Rank | 1 | 2 | 3 | 4 | 5 | |
| F8 | Mean | 3.413 846E+01 | 4.865 346E+01 | 2.333 657E+02 | 1.233 538E+02 | 3.120 466E+02 |
| Std.Dev | 7.876 400E+00 | 8.587 232E+00 | 1.226 479E+01 | 2.538 458E+01 | 1.521 375E+01 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F9 | Mean | 8.081 537E-01 | 9.136 564E+00 | 2.398 964E+02 | 8.4950 25E+02 | 5.345 025E+03 |
| Std.Dev | 1.112 753E+00 | 1.380 183E+01 | 9.508 573E+01 | 1.873 324E+02 | 8.238 979E+02 | |
| Rank | 1 | 2 | 3 | 4 | 5 | |
| F10 | Mean | 1.214 608E+02 | 8.926 982E+03 | 7.319 038E+03 | 2.246 446E+03 | 8.618 090E+03 |
| Std.Dev | 7.988 912E+01 | 8.627 269E+02 | 5.779 242E+02 | 5.056 926E+02 | 4.602 093E+02 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F11 | Mean | 1.516 405E+01 | 1.552 135E+01 | 2.263 788E+02 | 8.427 811E+01 | 4.670 863E+03 |
| Std.Dev | 3.847 255E+00 | 4.318 616E+00 | 2.010 200E+01 | 3.388 736E+01 | 5.982 808E+02 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F12 | Mean | 2.046 781E+03 | 4.763 678E+02 | 1.483 114E+07 | 1.255 844E+06 | 2.212 823E+09 |
| Std.Dev | 4.033 069E+02 | 3.560 081E+02 | 2.654 360E+07 | 9.493 159E+04 | 3.462 731E+08 | |
| Rank | 2 | 1 | 4 | 3 | 5 | |
| F13 | Mean | 2.621 488E+02 | 3.033 726E+02 | 1.153 537E+03 | 2.398 642E+05 | 7.341 457E+08 |
| Std.Dev | 1.832 757E+02 | 1.988 014E+02 | 2.339 697E+03 | 4.925 763E+06 | 1.745 182E+08 | |
| Rank | 1 | 2 | 3 | 4 | 5 | |
| F14 | Mean | 5.251 672E+01 | 6.181 658E+01 | 1.157 832E+02 | 2.930 826E+02 | 3.082 443E+05 |
| Std.Dev | 1.529 751E+01 | 1.809 699E+01 | 1.848 377E+01 | 4.983 813E+01 | 6.407 154E+04 | |
| Rank | 1 | 2 | 3 | 4 | 5 | |
| F15 | Mean | 1.339 617E+02 | 1.694 319E+02 | 1.182 831E+03 | 6.038 352E+04 | 5.692 922E+07 |
| Std.Dev | 7.066 456E+01 | 1.737 006E+02 | 3.093 095E+03 | 1.185 091E+04 | 3.210 364E+07 | |
| Rank | 1 | 2 | 3 | 4 | 5 | |
| F16 | Mean | 1.187 990E+01 | 3.729 244E+01 | 1.395 410E+03 | 8.539 923E+02 | 1.417 066E+03 |
| Std.Dev | 4.661 366E+00 | 3.541 467E+01 | 3.019 009E+02 | 3.847 808E+02 | 1.112 693E+02 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F17 | Mean | 4.985 393E+01 | 93.61 160E+01 | 1.028 323E+03 | 1.244 953E+03 | 1.425 701E+03 |
| Std.Dev | 1.819 171E+01 | 41.94 910E+01 | 2.054 238E+02 | 3.151 768E+02 | 1.616 623E+02 | |
| Rank | 1 | 2 | 3 | 4 | 5 | |
| F18 | Mean | 4.364 206E+01 | 5.696 849E+01 | 1.055 646E+02 | 3.179 190E+03 | 2.261 037E+06 |
| Std.Dev | 1.915 933E+01 | 3.355 479E+01 | 3.656 150E+01 | 1.192 158E+03 | 1.403 920E+06 | |
| Rank | 1 | 2 | 3 | 4 | 5 | |
| F19 | Mean | 5.908 400E+01 | 9.840 528E+01 | 9.171 463E+01 | 1.067 872E+04 | 1.813 256E+07 |
| Std.Dev | 2.858 040E+01 | 2.939 930E+01 | 2.615 188E+01 | 2.563 532E+03 | 6.407 498E+06 | |
| Rank | 1 | 2 | 3 | 4 | 5 | |
| F20 | Mean | 5.631 365E+01 | 2.399 107E+02 | 5.791 148E+02 | 4.005 540E+02 | 8.353 983E+02 |
| Std.Dev | 4.907 620E+01 | 1.656 535E+02 | 1.303 184E+02 | 2.036 536E+02 | 7.414 801E+01 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F21 | Mean | 2.230 077E+02 | 2.352 440E+02 | 4.881 213E+02 | 3.404 398E+02 | 5.240 545E+02 |
| Std.Dev | 5.362 003E+00 | 4.171 875E+00 | 4.194 098E+01 | 3.060 803E+02 | 2.049 588E+01 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F22 | Mean | 2.215 014E+03 | 9.931 407E+03 | 1.687 351E+03 | 2.457 653E+03 | 1.533 249E+03 |
| Std.Dev | 4.166 800E+03 | 2.534 992E+03 | 3.001 360E+03 | 6.142 509E+02 | 3.145 802E+02 | |
| Rank | 3 | 5 | 2 | 4 | 1 | |
| F23 | Mean | 3.338 374E+02 | 3.487 951E+02 | 7.443 997E+02 | 5.904 565E+02 | 8.272 068E+02 |
| Std.Dev | 1.153 556E+01 | 1.027 021E+01 | 2.985 466E+01 | 3.533 852E+01 | 2.886 901E+01 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F24 | Mean | 3.285 980E+02 | 3.410 099E+02 | 6.545 900E+02 | 5.321 738E+02 | 7.559 693E+02 |
| Std.Dev | 8.559 212E+00 | 7.540 451E+00 | 1.816 600E+01 | 2.400 561E+01 | 2.439 853E+01 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F25 | Mean | 4.198 295E+02 | 5.523 856E+02 | 6.143 588E+02 | 4.403 527E+02 | 1.797 553E+03 |
| Std.Dev | 5.387 923E+01 | 8.034 752E+01 | 3.907 954E+01 | 5.469 670E+01 | 2.568 785E+02 | |
| Rank | 1 | 3 | 4 | 2 | 5 | |
| F26 | Mean | 3.000 000E+02 | 300.000 0E+02 | 7.806 914E+02 | 4.194 289E+03 | 3.993 395E+03 |
| Std.Dev | 2.862 732E-06 | 1.192 357E-07 | 7.056 470E+02 | 6.529 694E+02 | 2.668 614E+02 | |
| Rank | 1 | 1 | 3 | 5 | 4 | |
| F27 | Mean | 5.000 112E+02 | 5.001 008E+02 | 5.807 666E+02 | 4.345 845E+02 | 1.077 033E+03 |
| Std.Dev | 1.275 416E-04 | 1.556 748E-04 | 2.026 774E+01 | 3.612 366E+00 | 7.535 584E+01 | |
| Rank | 2 | 3 | 4 | 1 | 5 | |
| F28 | Mean | 5.00 0106E+02 | 5.002 148E+02 | 5.521 856E+02 | 5.515 278E+02 | 1.555 080E+03 |
| Std.Dev | 1.896 448E-03 | 3.521 018E-02 | 9.384 375E+01 | 1.892 590E+01 | 1.219 588E+02 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F29 | Mean | 2.518 656E+02 | 3.192 407E+02 | 1.719 491E+03 | 1.661 386E+03 | 3.365 223E+03 |
| Std.Dev | 1.345 417E+01 | 7.735 786E+01 | 1.194 623E+02 | 5.001 756E+02 | 1.741 382E+02 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| F30 | Mean | 2.630 753E+02 | 2.7386 84E+02 | 2.614 784E+07 | 1.004 845E+05 | 1.884 786E+08 |
| Std.Dev | 3.227 386E+01 | 5.902 472E+01 | 6.514 978E+06 | 1.838 352E+04 | 2.391 956E+07 | |
| Rank | 1 | 2 | 4 | 3 | 5 | |
| Aveage rank | 1.30 | 2.13 | 3.40 | 3.27 | 4.83 | |
| Total rank | 1 | 2 | 4 | 3 | 5 | |

Fig.2
Comparison of effective iterations"


Fig.3
Cost of the path planned by SACOA and other algorithms"
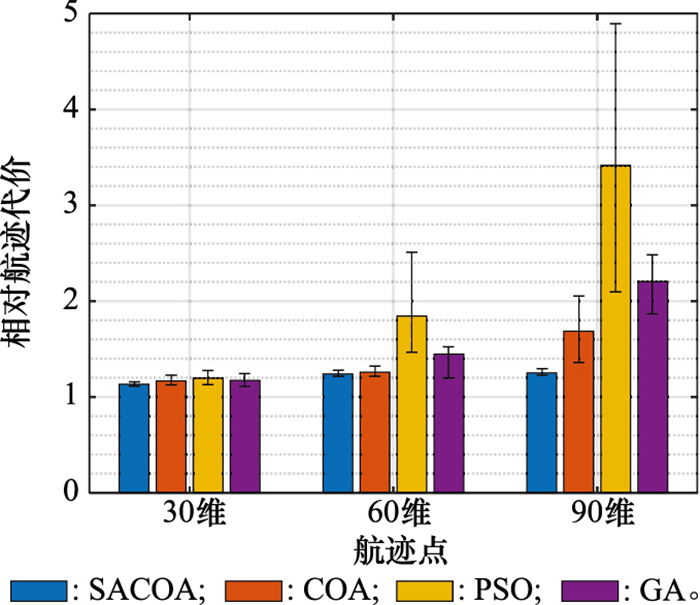

Fig.4
Comparison of path planning results"


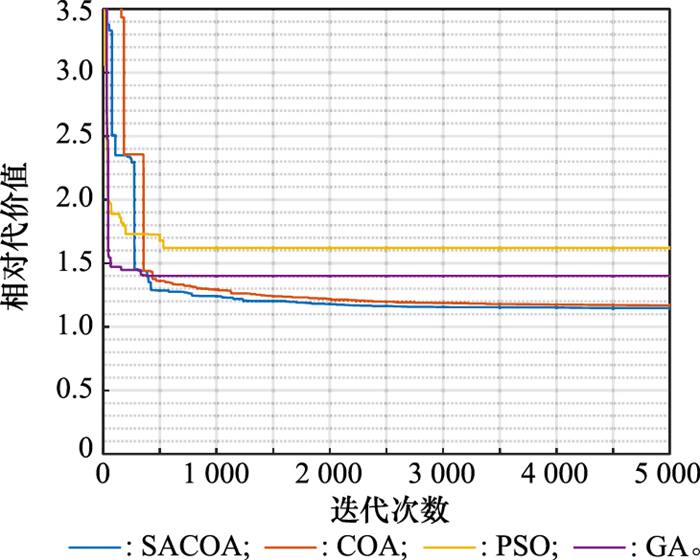
Fig.5
Curve of cost with the number of iterations"
| 1 | 郜晨. 多无人机自主任务规划方法研究[D]. 南京: 南京航空航天大学, 2016. |
| GAO C. Research on multi-UAV autonomous mission planning method[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016. | |
| 2 |
SALCEDO-SANZ S . Modern meta-heuristics based on nonlinear physics processes: a review of models and design procedures[J]. Physics Reports, 2016, 655, 1- 70.
doi: 10.1016/j.physrep.2016.08.001 |
| 3 |
MAVROVOUNIOTIS M , LI C , YANG S . A survey of swarm intelligence for dynamic optimization: algorithms and applications[J]. Swarm and Evolutionary Computation, 2017, 33, 1- 17.
doi: 10.1016/j.swevo.2016.12.005 |
| 4 |
WU Y . A survey on population-based meta-heuristic algorithms for motion planning of aircraft[J]. Swarm and Evolutionary Computation, 2021, 62, 100844.
doi: 10.1016/j.swevo.2021.100844 |
| 5 |
SILVA A J , SILVA A M , MOTTA T C F , et al. Heuristic and genetic algorithm approaches for UAV path planning under critical situation[J]. International Journal on Artificial Intelligence Tools, 2017, 26 (1): 1760008.
doi: 10.1142/S0218213017600089 |
| 6 |
SHAO S K , PENG Y , HE C L , et al. Efficient path planning for UAV formation via comprehensively improved particle swarm optimization[J]. ISA Transactions, 2020, 97, 415- 430.
doi: 10.1016/j.isatra.2019.08.018 |
| 7 | KONATOWSKI S, PAWŁOWSKI P. Ant colony optimization algorithm for UAV path planning[C]//Proc. of the IEEE 14th International Conference on Advanced Trends in Radioelecrtronics, Telecommunications and Computer Engineering, 2018: 177-182. |
| 8 |
ZHOU X J , GAO F , FANG X , et al. Improved bat algorithm for UAV path planning in three-dimensional space[J]. IEEE Access, 2021, 9, 20100- 20116.
doi: 10.1109/ACCESS.2021.3054179 |
| 9 |
DEWANGAN R K , SHUKLA A , GODFREY W W . Three dimensional path planning using grey wolf optimizer for UAVs[J]. Applied Intelligence, 2019, 49 (6): 2201- 2217.
doi: 10.1007/s10489-018-1384-y |
| 10 |
钱洲元, 雷明. 面向无人机航迹规划的自适应乌贼算法[J]. 哈尔滨工业大学学报, 2019, 51 (10): 37- 46.
doi: 10.11918/j.issn.0367-6234.201805004 |
|
QIAN Z Y , LEI M . Adaptive cuttlefish algorithm for UAV path planning[J]. Journal of Harbin Institute of Technology, 2019, 51 (10): 37- 46.
doi: 10.11918/j.issn.0367-6234.201805004 |
|
| 11 |
HUO L S , ZHU J H , LI Z M , et al. A hybrid differential symbiotic organisms search algorithm for UAV path planning[J]. Sensors, 2021, 21 (9): 3037.
doi: 10.3390/s21093037 |
| 12 | SAXENA P, TAYAL S, GUPTA R, et al. Three dimensional route planning for multiple unmanned aerial vehicles using salp swarm algorithm[J]. arXiv preprint, 2019. arXiv: 1911.10519. |
| 13 |
GUPTA S , DEEP K . A novel random walk grey wolf optimizer[J]. Swarm and Evolutionary Computation, 2019, 44, 101- 112.
doi: 10.1016/j.swevo.2018.01.001 |
| 14 | YANG L , GUO J , LIU Y . Three-dimensional UAV cooperative path planning based on the MP-CGWO algorithm[J]. International Journal of Innovative Computing Information and Control, 2020, 16, 991- 1006. |
| 15 |
DAS P K . Hybridization of kidney-inspired and sine-cosine algorithm for multi-robot path planning[J]. Arabian Journal for Science and Engineering, 2020, 45 (4): 2883- 2900.
doi: 10.1007/s13369-019-04193-y |
| 16 |
QU C Z , GAI W D , ZHONG M Y , et al. A novel reinforcement learning based grey wolf optimizer algorithm for unmanned aerial vehicles (UAVs) path planning[J]. Applied Soft Computing, 2020, 89, 106099.
doi: 10.1016/j.asoc.2020.106099 |
| 17 | GHAMBARI S, IDOUMGHAR L, JOURDAN L, et al. A hybrid evolutionary algorithm for offline UAV path planning[C]// Proc. of the International Conference on Artificial Evolution, 2019: 205-218. |
| 18 |
WU X D , BAI W B , XIE Y E , et al. A hybrid algorithm of particle swarm optimization, metropolis criterion and RTS smoother for path planning of UAVs[J]. Applied Soft Computing, 2018, 73, 735- 747.
doi: 10.1016/j.asoc.2018.09.011 |
| 19 |
DAS P K , BEHERA H S , DAS S , et al. A hybrid improved PSO-DV algorithm for multi-robot path planning in a clutter environment[J]. Neurocomputing, 2016, 207, 735- 753.
doi: 10.1016/j.neucom.2016.05.057 |
| 20 |
WU Q , SHEN X D , JIN Y Z , et al. Intelligent beetle antennae search for UAV sensing and avoidance of obstacles[J]. Sensors, 2019, 19 (8): 1758.
doi: 10.3390/s19081758 |
| 21 | 辛贵州. 无人飞行器航迹规划算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2010. |
| XIN G Z. Research on trajectory planning for UAV[D]. Harbin: Harbin Engineering University, 2010. | |
| 22 |
LI G , CHOU W . Path planning for mobile robot using self-adaptive learning particle swarm optimization[J]. Science China Information Sciences, 2018, 61 (5): 052204.
doi: 10.1007/s11432-016-9115-2 |
| 23 |
QU C Z , GAI W D , ZHANG J , et al. A novel hybrid grey wolf optimizer algorithm for unmanned aerial vehicle (UAV) path planning[J]. Knowledge-Based Systems, 2020, 194, 105530.
doi: 10.1016/j.knosys.2020.105530 |
| 24 |
YU X , LI C , ZHOU J F . A constrained differential evolution algorithm to solve UAV path planning in disaster scenarios[J]. Knowledge-Based Systems, 2020, 204, 106209.
doi: 10.1016/j.knosys.2020.106209 |
| 25 | PIEREZAN J, COELHO L D S. Coyote optimization algorithm: a new metaheuristic for global optimization problems[C]// Proc. of the IEEE Congress on Evolutionary Computation, 2018: 1-8. |
| 26 | WEISS G H . Aspects and applications of the random walk[M]. Elsevier Science & Technology, 1994. |
| 27 |
HUMPHRIES N E , QUEIROZ N , DYER J R M , et al. Environmental context explains Lévy and Brownian movement patterns of marine predators[J]. Nature, 2010, 465 (7301): 1066- 1069.
doi: 10.1038/nature09116 |
| 28 |
LEE C Y , YAO X . Evolutionary programming using mutations based on the Lévy probability distribution[J]. IEEE Trans.on Evolutionary Computation, 2004, 8 (1): 1- 13.
doi: 10.1109/TEVC.2003.816583 |
| 29 |
HAKLI H , UGUZ H . A novel particle swarm optimization algorithm with Levy flight[J]. Applied Soft Computing, 2014, 23, 333- 345.
doi: 10.1016/j.asoc.2014.06.034 |
| 30 |
AYDOGDU I · , AKIN A , SAKA M P . Design optimization of real world steel space frames using artificial bee colony algorithm with Levy flight distribution[J]. Advances in Engineering Software, 2016, 92, 1- 14.
doi: 10.1016/j.advengsoft.2015.10.013 |
| 31 |
MANTEGNA R N . Fast, accurate algorithm for numerical simulation of Levy stable stochastic processes[J]. Physical Review E, 1994, 49 (5): 4677.
doi: 10.1103/PhysRevE.49.4677 |
| 32 | AWAD N H, ALI M Z, LIANG J J, et al. Problem definitions and evaluation criteria for the CEC 2017 special session and competition on single objective bound constrained real-parameter numerical optimization[R]. Singapore: Nanyang Technological University, 2016. |
| [1] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [2] | Jing YU, Enmi YONG, Hanyang CHEN, Dong HAO, Xiancai ZHANG. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack [J]. Systems Engineering and Electronics, 2022, 44(9): 2849-2857. |
| [3] | Jianfeng YANG, Heye XIAO, Liang LI, Junqiang BAI, Weihao DONG. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism [J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. |
| [4] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [5] | Yuanjie LU, Zhimin LIU, Zhixiao SUN, Dong KAN. Model-based integrated evaluation of UAV system architecture [J]. Systems Engineering and Electronics, 2022, 44(4): 1239-1245. |
| [6] | Yuanyuan ZHANG, Yang GAO, Peng ZHU, Jintao LIU, Shushan GU. UAV reconnaissance tactical planning based on colored Petri nets [J]. Systems Engineering and Electronics, 2022, 44(3): 900-907. |
| [7] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [8] | Xueyong YU, Ye ZHU, Lixiang QIU, Hongbo ZHU. Energy efficient offloading strategy for UAV aided edgecomputing systems [J]. Systems Engineering and Electronics, 2022, 44(3): 1022-1029. |
| [9] | Xingjia YANG, Keqing DUAN, Xiang LI, Wei QI. Resolving range ambiguity for cooperative detection using UAV swarms [J]. Systems Engineering and Electronics, 2022, 44(2): 480-489. |
| [10] | Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance [J]. Systems Engineering and Electronics, 2022, 44(2): 529-537. |
| [11] | Buhua LIU, Dan DING, Liu YANG, Naiyang XUE, Zhongqian LIU. OFDM data transmission technology of UAV based on deep neural network [J]. Systems Engineering and Electronics, 2022, 44(2): 696-702. |
| [12] | Zhipeng WU, Ping ZHANG, Zhen LI, Lei HUANG, Chang LIU, Shuo GAO. Vegetation height inversion method based on light-weighted and small UAV-radar [J]. Systems Engineering and Electronics, 2022, 44(12): 3667-3675. |
| [13] | Yujia WANG, Wei FANG, Tao XU, Yingfu YU, Boyuan DENG. Intelligent decision-making model by unmanned aerial vehicles in sea-to-air confrontation based on genetic fuzzy trees [J]. Systems Engineering and Electronics, 2022, 44(12): 3756-3765. |
| [14] | Wenqi YANG, Jianhua LU, Xu JIANG, Yuanxin WANG. Design of quadrotor attitude active disturbance rejection controller based on improved ESO [J]. Systems Engineering and Electronics, 2022, 44(12): 3792-3799. |
| [15] | Yang YIN, Quanshun YANG, Zheng WANG, Yang LIU. USV cluster coverage search method with communication distance constraint [J]. Systems Engineering and Electronics, 2022, 44(12): 3821-3828. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||