Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (2): 529-537.doi: 10.12305/j.issn.1001-506X.2022.02.22
• Systems Engineering • Previous Articles Next Articles
Distributed formation control of UAV swarm with dynamic obstacle avoidance
Xiaowei FU1,*, Jing PAN2
- 1. School of Electronics and Information, Northwestern Polytechnical University, Xi'an 710129, China
2. Xi'an Modern Control Technology Research Institute, Xi'an 710065, China
-
Received:2021-01-05Online:2022-02-18Published:2022-02-24 -
Contact:Xiaowei FU
CLC Number:
Cite this article
Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance[J]. Systems Engineering and Electronics, 2022, 44(2): 529-537.
share this article
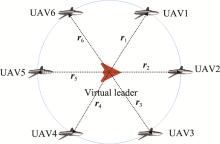
Fig.1
Circle formation in steady state of UAV swarm"
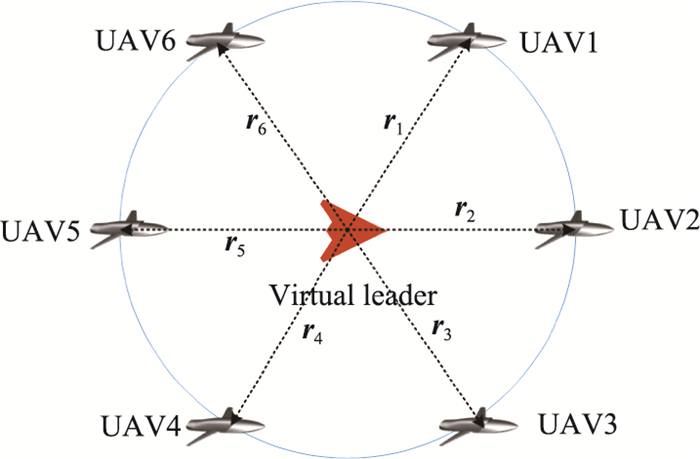

Fig.2
Collision prediction between UAV and dynamic obstacle"


Fig.3
Change trend of ϕα(z) function"


Fig.4
Whole process of UAV swarm flight in three-dimension space"

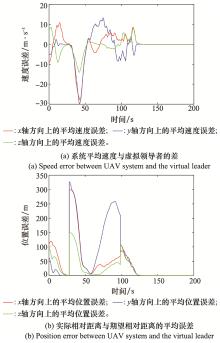
Fig.5
Speed error and distance error of the UAV swarm"


Fig.6
Minimum distance between UAVs and obstacles"
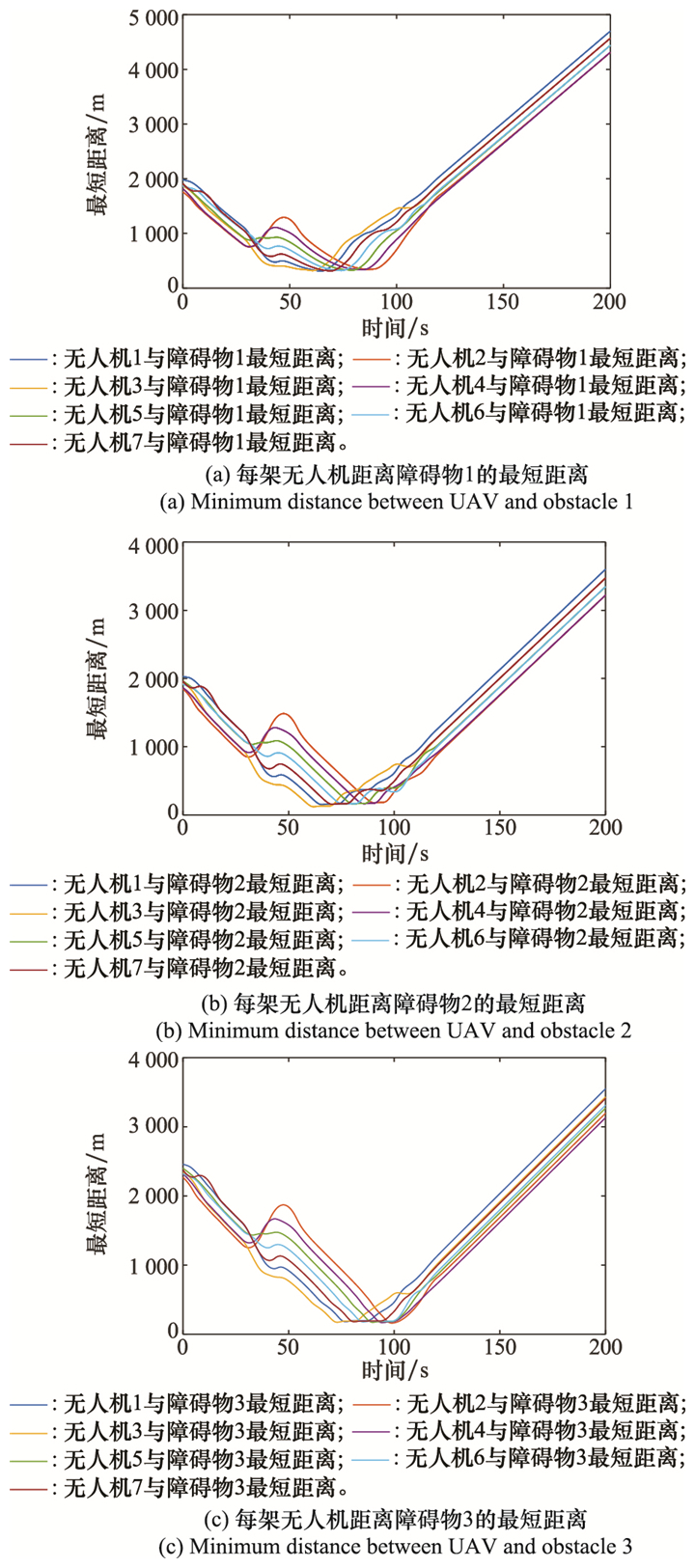

Fig.7
Acceleration change of the UAVs"
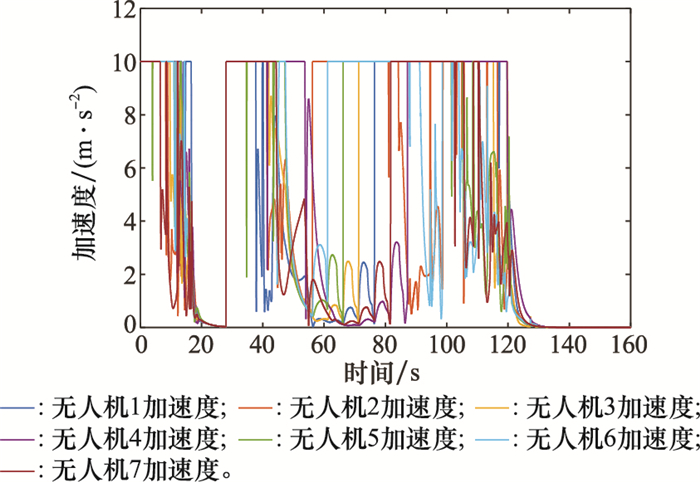

Fig.8
Velocity change of the UAVs"
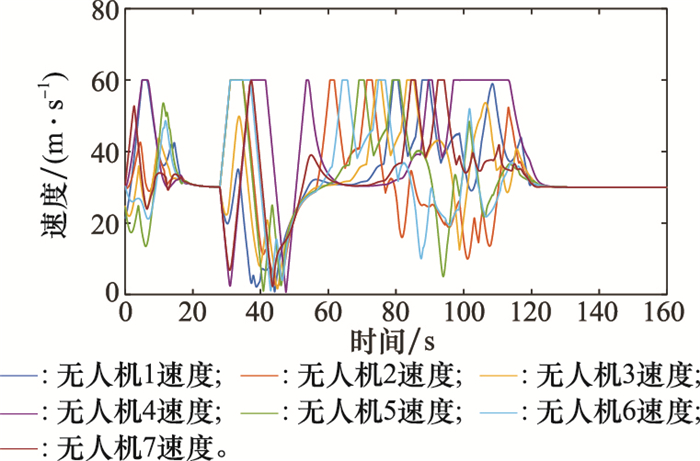

Fig.9
Average error between actual relative distance and expected relative distance without warning mechanism"

| 1 | 牛轶峰, 肖湘江, 柯冠岩. 无人机集群作战概念及关键技术分析[J]. 国防科技, 2013, 34 (5): 37- 43. |
| NIU Y F , XIAO X J , KE G Y . Operation concept and key techniques of unmanned aerial vehicle swarms[J]. National Defense Science & Technology, 2013, 34 (5): 37- 43. | |
| 2 | 韩月明, 方丹, 张红艳, 等. 无人机集群典型作战运用样式及关键技术分析[J]. 飞航导弹, 2020, (9): 43- 47. |
| HAN Y M , FANG D , ZHANG H Y , et al. Analysis of typical operational patterns and key technologies of UAV cluster[J]. Aerodynamic Missile Journal, 2020, (9): 43- 47. | |
| 3 | ZUN Q , WANG D D , SHAO S K , et al. Research status and development of multi-UAV coordinated formation flight control[J]. Journal of Harbin Institute of Technology, 2017, 49 (3): 1- 14. |
| 4 | 沈林成, 牛轶峰, 朱华勇. 多无人机自主协同控制理论与方法[M]. 北京: 国防工业出版社, 2013. |
| SHEN L C , NIU Y F , ZHU H Y . Theory and method of auto-nomous cooperative control of UAV[M]. Beijing: National Defence Industry Press, 2013. | |
| 5 |
TOKEKAR P , HOOK J V , MULLA D , et al. Sensor planning for a symbiotic UAV and UGV system for precision agriculture[J]. IEEE Trans.on Robotics, 2016, 32 (6): 1498- 1511.
doi: 10.1109/TRO.2016.2603528 |
| 6 |
CHANG K , XIA Y Q , HUANG K L . UAV formation control design with obstacle avoidance in dynamic three-dimensional environment[J]. Springer Plus, 2016, 5 (1): 1- 16.
doi: 10.1186/s40064-015-1659-2 |
| 7 |
QIU H X , DUAN H B . Multiple UAV distributed close formation control based on in-flight leadership hierarchies of pigeon flocks[J]. Aerospace Science Technology, 2017, 70, 471- 486.
doi: 10.1016/j.ast.2017.08.030 |
| 8 |
DUAN H B , QIU H X . Unmanned aerial vehicle distributed formation rotation control inspired by leader-follower reciprocation of migrant birds[J]. IEEE Access, 2018, 6, 23431- 23443.
doi: 10.1109/ACCESS.2018.2815664 |
| 9 |
LUO Q N , DUAN H B . Distributed UAV flocking control based on homing pigeon hierarchical strategies[J]. Aerospace Science and Technology, 2017, 70, 257- 264.
doi: 10.1016/j.ast.2017.08.010 |
| 10 |
ASKARI A , MORTAZAVI M , TALEBI H A . UAV formation control via the virtual structure approach[J]. Journal of Aerospace Engineering, 2015, 28 (1): 04014047.
doi: 10.1061/(ASCE)AS.1943-5525.0000351 |
| 11 |
YAN X , JIANG D P , MIAO R L , et al. Formation control and obstacle avoidance algorithm of a multi-USV system based on virtual structure and artificial potential field[J]. Journal of Marine Science and Engineering, 2021, 9 (2): 161.
doi: 10.3390/jmse9020161 |
| 12 |
REN W , BEARD R W . Formation feedback control for multiple spacecraft via virtual structures[J]. IEE Proceedings-Control Theory and Applications, 2004, 151 (3): 357- 368.
doi: 10.1049/ip-cta:20040484 |
| 13 |
OH H , SHIRAZI A R , SUN C , et al. Bio-inspired self-organising multi-robot pattern formation: a review[J]. Robotics and Autonomous Systems, 2017, 91, 83- 100.
doi: 10.1016/j.robot.2016.12.006 |
| 14 | FIERRO R , DAS A , SPLETZER J , et al. A framework and architecture for multi-robot coordination[J]. The International Journal of Robotics Research, 2002, 21 (10/11): 977- 995. |
| 15 |
FREDSLUND J , MATARIC M . A general algorithm for robot formations using local sensing and minimal communication[J]. IEEE Trans.on Robotics and Automation, 2002, 18 (5): 837- 846.
doi: 10.1109/TRA.2002.803458 |
| 16 | ALI Q , MONTENEGRO S . Explicit model following distributed control scheme for formation flying of mini UAVs[J]. IEEE Access, 2016, 1 (4): 397- 406. |
| 17 | TAN K, LEWIS M. Virtual structures for high-precision cooperative mobile robotic control[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 1996: 132-139. |
| 18 |
LEWIS M , TAN K . High precision formation control of mobile robots using virtual structures[J]. Autonomous Robots, 1997, 4 (4): 387- 403.
doi: 10.1023/A:1008814708459 |
| 19 | SCHARF D P, HADAEGH F Y, PLOEN S R. A survey of spacecraft formation flying guidance and control. Part Ⅱ: control[C]//Proc. of the IEEE American Control Conference, 2004: 2976-2985. |
| 20 | REN W . Consensus strategies for cooperative control of vehicle formations[J]. IET Control Theory & Applications, 2007, 1 (2): 505- 512. |
| 21 | REN W. Consensus based formation control strategies for multi-vehicle systems[C]//Proc. of the IEEE American Control Conference, 2006. |
| 22 | 马培蓓, 雷明, 纪军. 基于一致性的多无人机协同编队设计[J]. 战术导弹技术, 2017, (2): 86- 90. |
| MA P P , LEI M , JI J . Multi-UAV cooperative formation design based on consensus[J]. Tactical Missile Technology, 2017, (2): 86- 90. | |
| 23 |
KHATIB O B . A unified approach for motion and force of robot manipulators[J]. IEEE Journal of Robotics and Automation, 1987, 3 (1): 43- 53.
doi: 10.1109/JRA.1987.1087068 |
| 24 |
OLFATI-SABER R . Flocking for multi-agent dynamic systems: algorithms and theory[J]. IEEE Trans.on Automatic Control, 2006, 51 (3): 401- 420.
doi: 10.1109/TAC.2005.864190 |
| 25 | OLFATI-SABER R. Flocking with obstacle avoidance, CIT-CDS 03-006[R]. Pasadena, CA: California Institute of Technology, 2003. |
| 26 | 伍友利, 叶圣涛, 方洋旺, 等. 固定翼无人机群的集群和避障控制[J]. 国防科技大学学报, 2019, 41(5): 103-110. |
| WU Y L, YE S T, FANG Y W, Z, et al. Flocking and obstacles avoidance for fixed-wing unmanned aerial vehicle swarm[J]. Journal of National University of Defense Technology, 2019, 41(5): 103-110. | |
| 27 |
张超省, 王健, 张林, 等. 面向复杂障碍场的多智能体系统集群避障模型[J]. 兵工学报, 2021, 42 (1): 141- 150.
doi: 10.3969/j.issn.1000-1093.2021.01.016 |
|
ZHANG C S , WANG J , ZHANG L , et al. A cluster obstacle avoidance model for multi-agent systems facing complex obstacle fields[J]. Acta Armamentarii, 2021, 42 (1): 141- 150.
doi: 10.3969/j.issn.1000-1093.2021.01.016 |
|
| 28 | 杜婉茹, 王潇茵, 田涛, 等. 面向未知环境及动态障碍的人工势场路径规划算法[J]. 计算机科学, 2021, 48 (2): 249- 256. |
| DU W R , WANG X Y , TIAN T , et al. Artificial potential field path planning algorithm for unknown environment and dynamic obstacles[J]. Computer Science, 2021, 48 (2): 249- 256. | |
| 29 | YANG Y, NAIXUE X, NAK Y C, et al. A decentralized and adaptive flocking algorithm for autonomous mobile robots[C]//Proc. of the 3rd International Conference on Grid and Pervasive Computing, 2008: 262-268. |
| 30 | 娄柯. 多智能体系统蜂拥控制及应用[D]. 无锡: 江南大学, 2013. |
| LOU K. Flocking control of multi-agent systems and its applications[D]. Wuxi: Jiangnan University, 2013. | |
| 31 |
FU X W , PAN J , WANG H X , et al. A formation maintenance and reconstruction method of UAV swarm based on distributed control[J]. Aerospace Science and Technology, 2020, 104, 105981.
doi: 10.1016/j.ast.2020.105981 |
| [1] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [2] | Xingjia YANG, Keqing DUAN, Xiang LI, Wei QI. Resolving range ambiguity for cooperative detection using UAV swarms [J]. Systems Engineering and Electronics, 2022, 44(2): 480-489. |
| [3] | Yi ZHANG, Guowei FANG, Xiuxia YANG. Target tracking control of multi-UAV formation with prescribed performance guarantees [J]. Systems Engineering and Electronics, 2021, 43(4): 1069-1079. |
| [4] | Yi ZHANG, Guowei FANG, Xiuxia YANG. Target tracking method for UAVs formation based on graph Laplacian [J]. Systems Engineering and Electronics, 2021, 43(3): 796-805. |
| [5] | Yang ZHANG, Guangya SI, Yanzheng WANG. Simulation of unmanned aerial vehicle swarm electromagnetic operation concept [J]. Systems Engineering and Electronics, 2020, 42(7): 1510-1518. |
| [6] | ZHANG Yang, SI Guangya, WANG Yanzheng. Modeling of cooperative target allocation of the UAV swarm cyberspace attack action [J]. Systems Engineering and Electronics, 2019, 41(9): 2025-2033. |
| [7] | MAO Qiong, LI Xiaomin, WANG Zhengjun. Formation and re-formation control method for UAVs formation shape based on rules [J]. Systems Engineering and Electronics, 2019, 41(5): 1118-1126. |
| [8] |
GAO Yang, LI Dongsheng.
Swarm situation perception consensus evaluation via intervalnumber Heronian operators with variable weights
[J]. Systems Engineering and Electronics, 2019, 41(1): 89-95.
|
| [9] | FU Xiao-wei, CUI Hong-jie, GAO Xiao-guang. Distributed solving method of multi-UAV rendezvous problem [J]. Systems Engineering and Electronics, 2015, 37(8): 1797-1802. |
| [10] | YANG Jing, SHI Xiaoping. NDI formation controller design for UAV based on #br# super twisting algorithm [J]. Systems Engineering and Electronics, 2014, 36(7): 1380-1385. |
| [11] | SONG Min,WEI Rui-xuan,HU Ming-lang. Unmanned aerial vehicle formation control for reconnaissance task based on virtual leader [J]. Journal of Systems Engineering and Electronics, 2010, 32(11): 2412-2415. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||