Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (3): 967-976.doi: 10.12305/j.issn.1001-506X.2022.03.29
• Guidance, Navigation and Control • Previous Articles Next Articles
Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm
Xuping GU*, Daquan TANG
- School of Aviation Operations and Support, Naval Aviation University, Yantai 264001, China
-
Received:2021-04-15Online:2022-03-01Published:2022-03-10 -
Contact:Xuping GU
CLC Number:
Cite this article
Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm[J]. Systems Engineering and Electronics, 2022, 44(3): 967-976.
share this article

Fig.1
Hierarchical cooperative navigation"
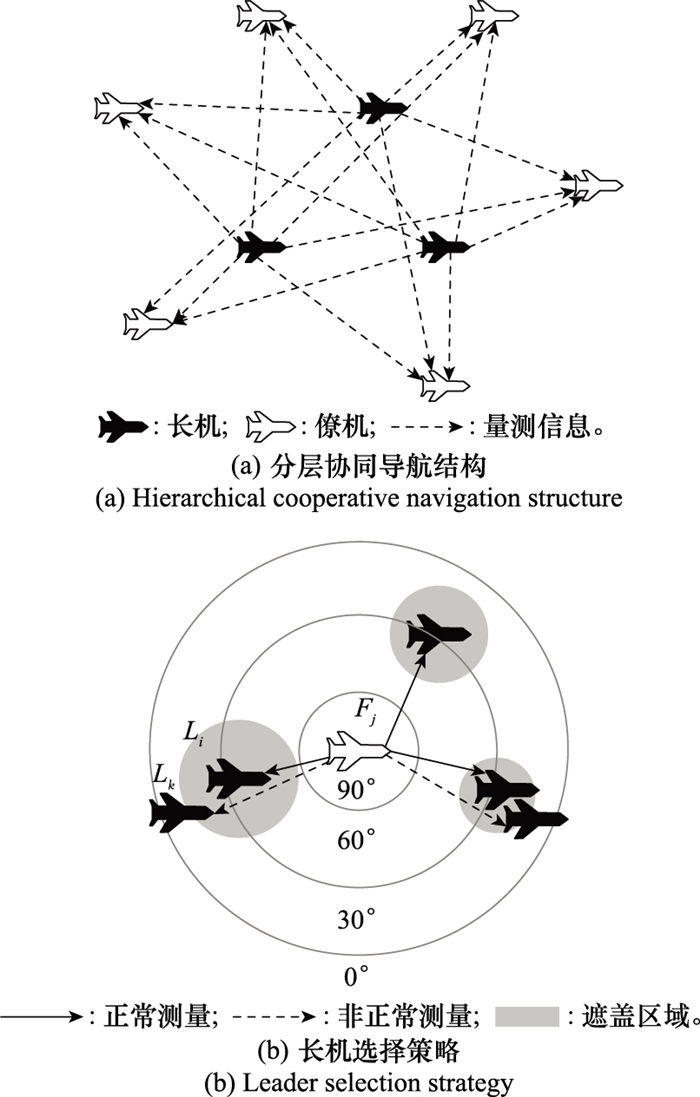
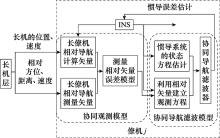
Fig.2
Overall scheme of hierarchical cooperative navigation system"

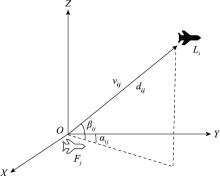
Fig.3
Follower relative navigation measurement"
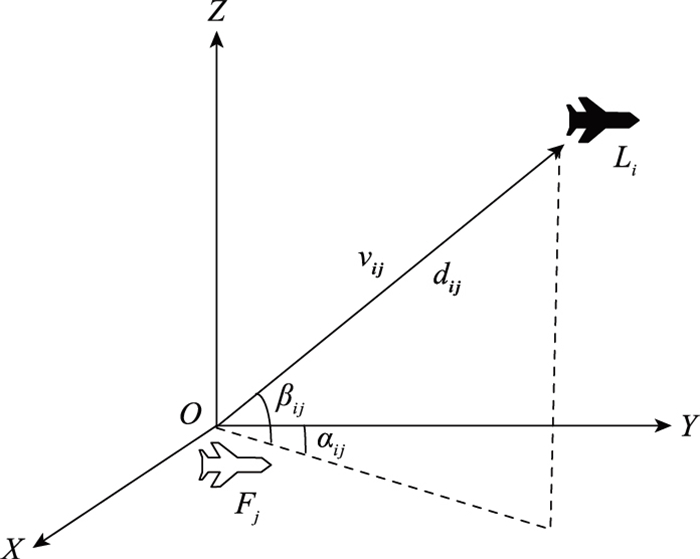
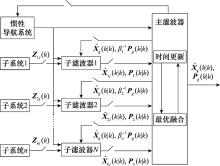
Fig.4
Structure framework of FF"

Table 1
Parameters of the navigation sensors"
| 参数 | 数值 |
| 加速度计白噪声均方根/μg0 | 100 |
| 加速度计一阶马尔可夫噪声均方根/((°)·h-1) | 100 |
| 加速度计一阶马尔可夫时间常数/s | 3 600 |
| 陀螺仪白噪声均方根/((°)·h-1) | 0.1 |
| 陀螺仪一阶马尔可夫噪声均方根/((°)·h-1) | 0.1 |
| 陀螺仪一阶马尔可夫时间常数/s | 3 600 |
| 相对速度测量白噪声均方根/(m·s-1) | 1 |
| 相对距离测量白噪声均方根/m | 3 |
| 仰角测量白噪声均方根/(°) | 0.1 |
| 方位角测量白噪声均方根/(°) | 0.1 |
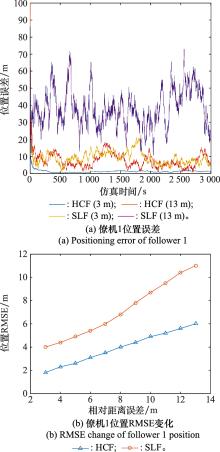
Fig.5
Position error under different ranging accuracies"
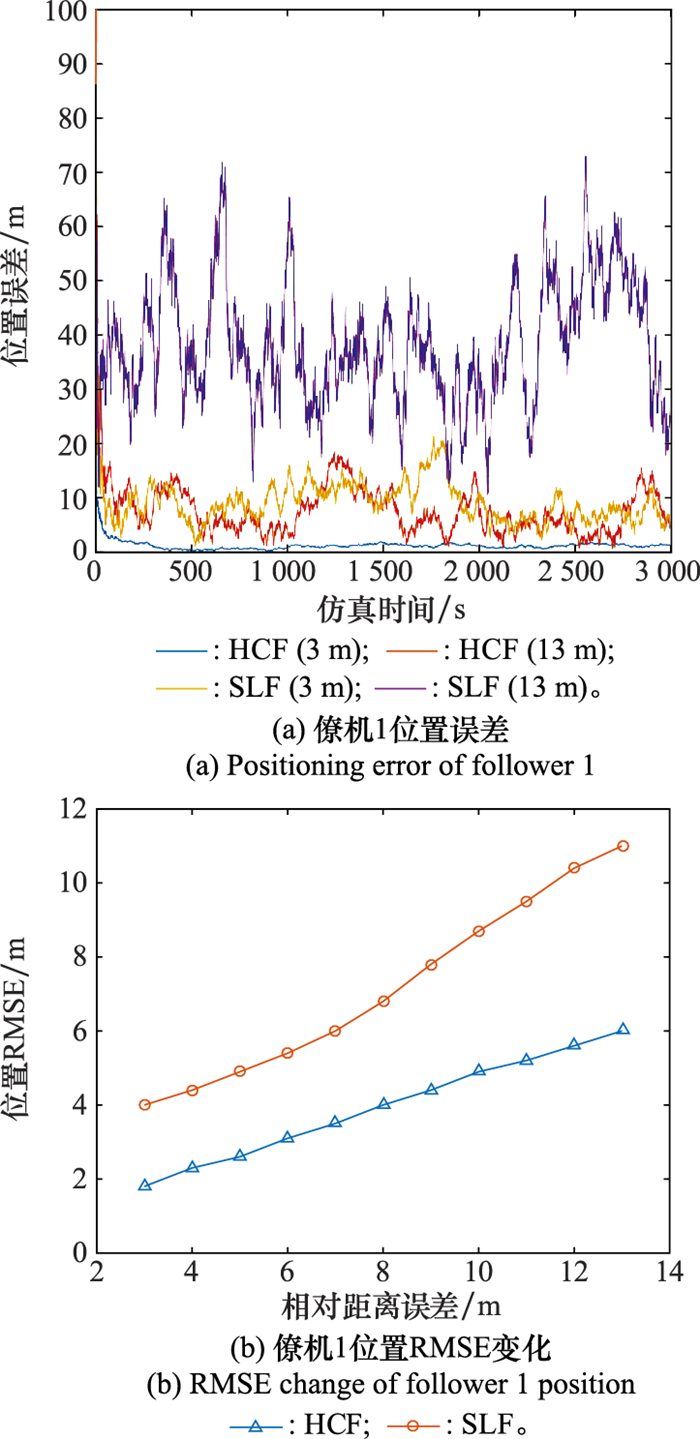
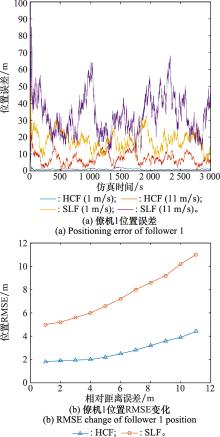
Fig.6
Position error under different velocity accuracies"
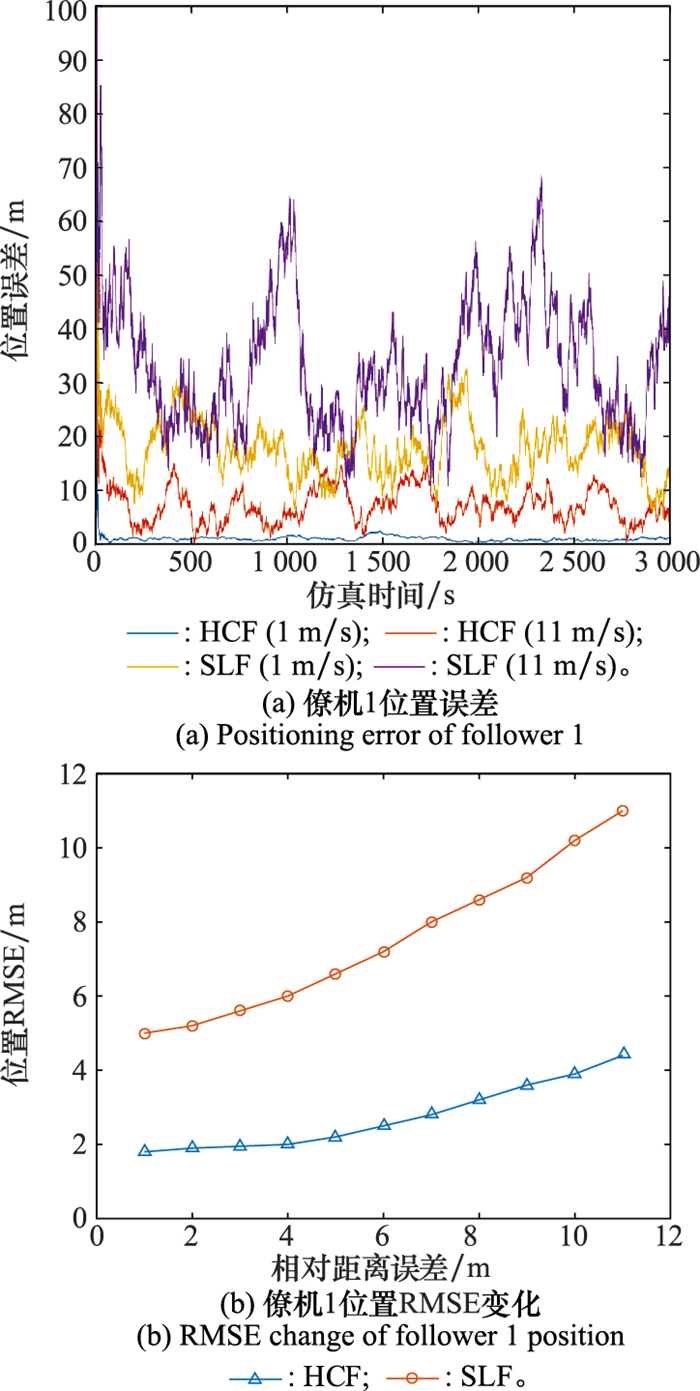

Fig.7
Position error under different angular accuracies"
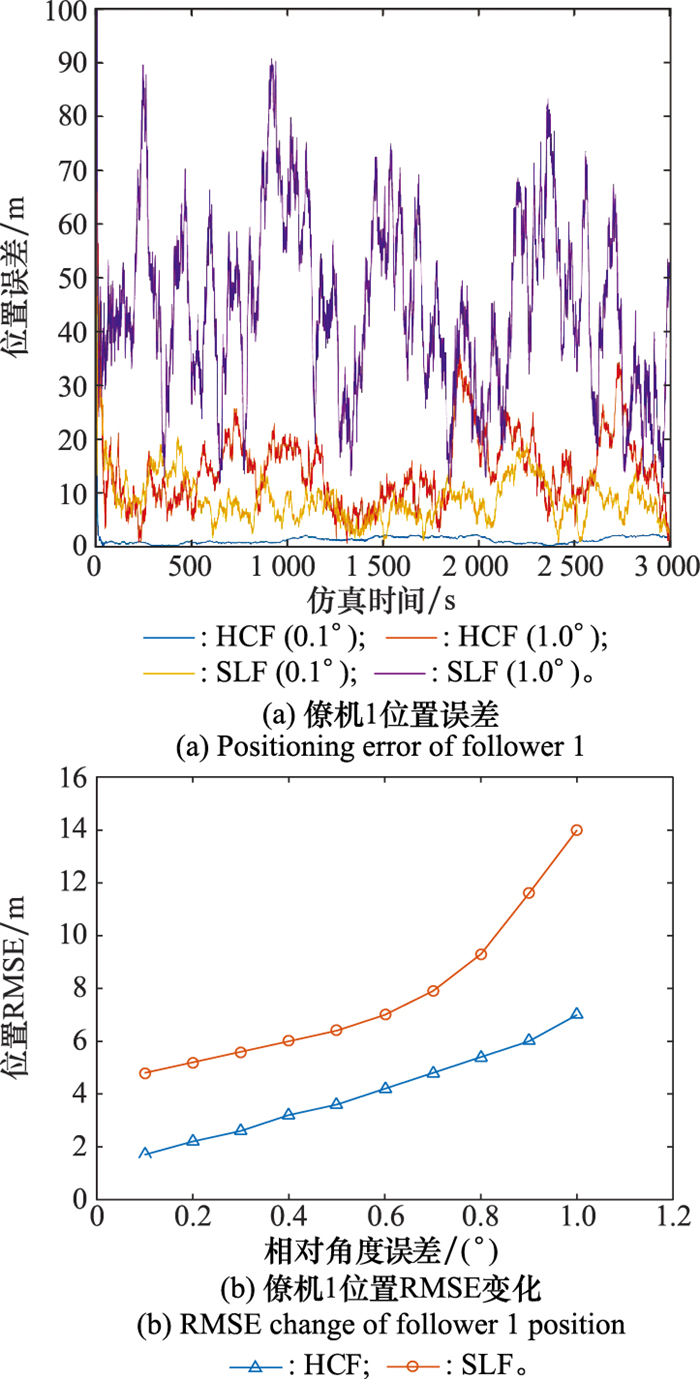
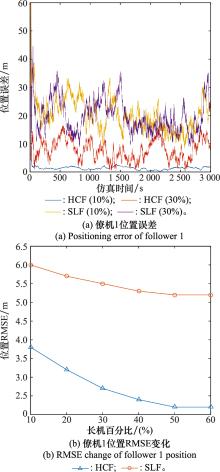
Fig.8
Position error under different proportions of leader"
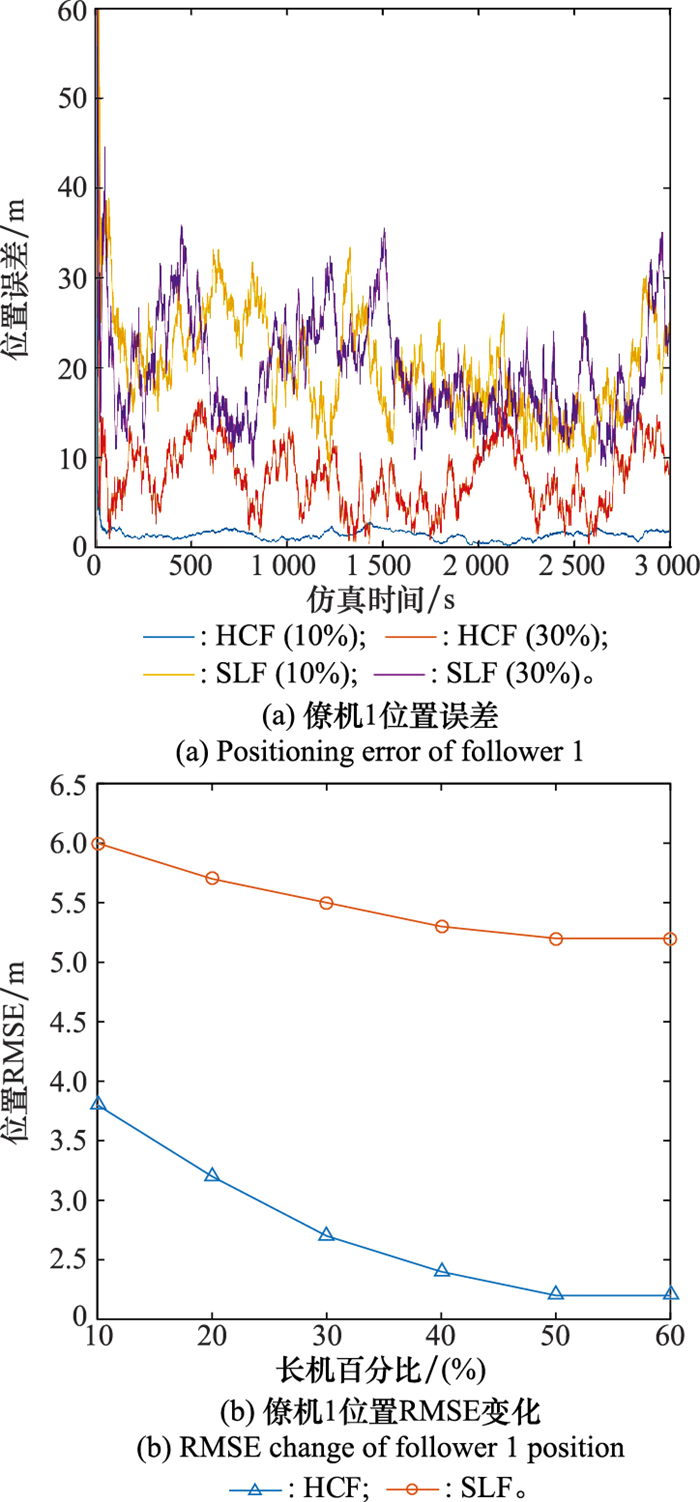
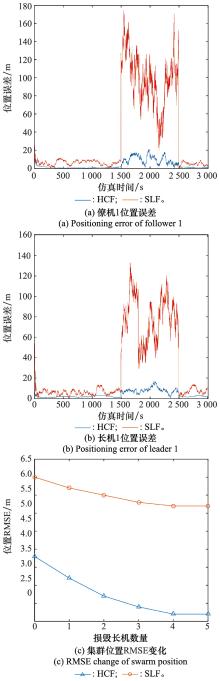
Fig.9
Navigation error associated with leader plane failure"
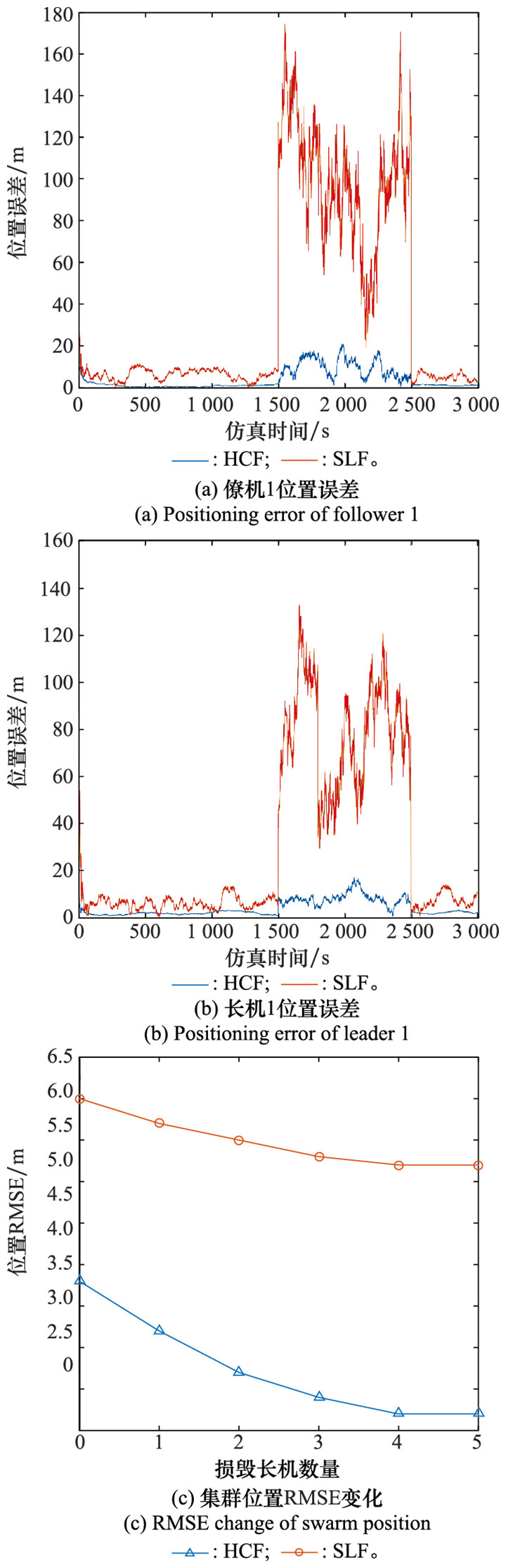

Fig.10
Comparison of different filtering algorithms"
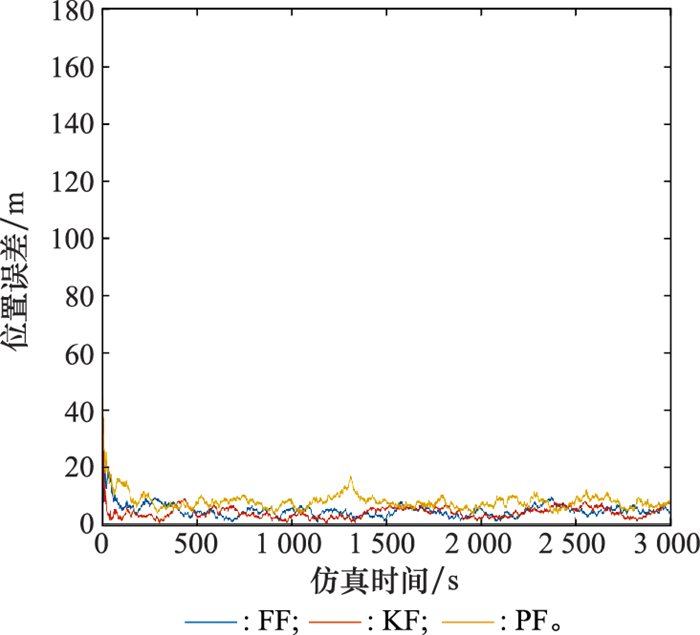
Table 2
Simulation time comparison of different algorithms s"
| 算法 | 时间 |
| FF | 1.721 |
| KF | 4.346 |
| PF | 4.074 |
| 1 | SCHERER J, RINNER B. Persistent multi-UAV surveillance with energy and communication constraints[C]//Proc. of the IEEE International Conference on Automation Science and Engineering, 2016: 1225-1230. |
| 2 |
CHEN H X , NAN Y , YANG Y . Multi-UAV reconnaissance task assignment for heterogeneous targets based on modified symbiotic organisms search algorithm[J]. Sensors, 2019, 19 (3): 734- 745.
doi: 10.3390/s19030734 |
| 3 | HUANG T P , HUANG D Q , WANG Z K , et al. Robust trac-king control of a quadrotor UAV based on adaptive sliding mode controller[J]. Complexity, 2019, 21 (4): 321- 335. |
| 4 | SUN F J , WANG X C , ZHANG R . Task scheduling system for UAV operations in agricultural plant protection environment[J]. Journal of Ambient Intelligence and Humanized Computing, 2020, 21 (6): 123- 135. |
| 5 |
JUNG S H , ARIYUR K B . Strategic cattle roundup using multiple quadrotor UAVs[J]. International Journal of Aeronautical and Space Science, 2017, 18 (2): 315- 326.
doi: 10.5139/IJASS.2017.18.2.315 |
| 6 | LOTTES P, KHANNA R, PFEIFER J, et al. UAV-based crop and weed classification for smart farming[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2017: 3024-3031. |
| 7 | GRAYSON S. Search & rescue using multi-robot systems[EB/OL]. [2021-04-10]. https://www.maths.tcd.ie/~graysons/documents/COMP47130_SurveyPaper.pdf. |
| 8 |
OH B H , KIM K , CHOI H L , et al. Cooperative multiple agent-based algorithm for evacuation planning for victims with different urgencies[J]. Journal of Aerospace Information Systems, 2018, 15 (6): 382- 395.
doi: 10.2514/1.I010589 |
| 9 | BALAMURUGAN G, VALARMATHI J, NAIDU V P S. Survey on UAV navigation in GPS denied environments[C]//Proc. of the IEEE International Conference on Signal Processing, Communication, Power and Embedded System, 2016: 198-204. |
| 10 | MENG H W , GUO Y M . Automatic safety routing inspection of the electric circuits based on UAV light detection and ranging[J]. DEStech Transactions on Engineering and Technology Research, 2017, 15 (3): 123- 145. |
| 11 | HUANG T P , HUANG D Q , WANG Z K , et al. Robust tracking control of a quadrotor UAV based on adaptive sliding mode controller[J]. Complexity, 2019, 20 (7): 167- 181. |
| 12 | SUN F J , WANG X C , ZHANG R . Task scheduling system for UAV operations in agricultural plant protection environment[J]. Journal of Ambient Intelligence and Humanized Computing, 2020, 12 (6): 165- 174. |
| 13 | MAZA I, KONDAK K, BERNARD M, et al. Multi-UAV coope-ration and control for load transportation and deployment[C]// Proc. of the 2nd International Symposium on UAVs, 2009: 417-449. |
| 14 |
OMAGARI H , HIGASHINO S I . Provisional-ideal-point-based multi-objective optimization method for drone delivery problem[J]. International Journal of Aeronautical and Space Sciences, 2018, 19 (1): 262- 277.
doi: 10.1007/s42405-018-0021-7 |
| 15 |
SKOROBOGATOV G , BARRADO C , SALAMÍ E . Multiple UAV systems: a survey[J]. Unmanned Systems, 2020, 8 (2): 149- 169.
doi: 10.1142/S2301385020500090 |
| 16 |
MOHIUDDIN A , TAREK T , ZWEIRI Y , et al. A survey of single and multi-UAV aerial manipulation[J]. Unmanned Systems, 2020, 8 (2): 119- 147.
doi: 10.1142/S2301385020500089 |
| 17 | 梁晓龙, 张佳强, 吕娜. 无人机集群[M]. 西安: 西北工业大学出版社, 2018. |
| LIANG X L , ZHANG J Q , LYU N . UAV cluster[M]. Xi'an: Northwest University of Technology Press, 2018. | |
| 18 | SONG W. An integrated GPS/vision UAV navigation system based on Kalman filter[C]//Proc. of the IEEE International Conference on Artificial Intelligence and Information Systems, 2020: 376-380. |
| 19 |
LU Y , XUE Z , XIA G S , et al. A survey on vision-based UAV navigation[J]. Geo-spatial Information Science, 2018, 21 (1): 21- 32.
doi: 10.1080/10095020.2017.1420509 |
| 20 |
CHEN H X , NAN Y , YANG Y . Multi-UAV reconnaissance task assignment for heterogeneous targets based on modified symbiotic organisms search algorithm[J]. Sensors, 2019, 19 (3): 734- 744.
doi: 10.3390/s19030734 |
| 21 |
GROSS J N , GU Y , RHUDY M B . Robust UAV relative navigation with DGPS, INS, and peer-to-peer radio ranging[J]. IEEE Trans.on Automation Science and Engineering, 2015, 12 (3): 935- 944.
doi: 10.1109/TASE.2014.2383357 |
| 22 | XING X J, GUI H R, MA Z, et al. Multi-source fault tolerant integrated navigation for a certain UAV based on I-NS/BD/RP/TAN[C]//Proc. of the IEEE 15th International Conference on Control and Automation, 2019: 313-318. |
| 23 | 王念曾. 基于惯性/GNSS/UWB信息融合的小型无人机编队相对导航技术研究[D]. 南京: 南京航空航天大学, 2019. |
| WANG N Z. Research on relative navigation technology of small UAV formation based on inertial / GNSS / UWB information fusion[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019. | |
| 24 | 熊骏, 熊智, 于永军, 等. UWB辅助的无人机近距离编队相对导航方法[C]//中国惯性技术学会高端前沿专题学术会议-钱学森讲坛: 天空海一体化水下组合导航会议论文集, 2017: 257-266. |
| XIONG J, XIONG Z, YU Y J, et al. UWB assisted UAV close formation relative navigation method[C]//Proc. of the High End Frontier Symposium of China Inertial Technology Society- Qian Xuesen's Forum: Proceedings of Sky Sea Integrated Underwater Integrated Navigation Conference, 2017: 257-266. | |
| 25 | IRIGIREDDY A S C R, MONCAYO H. Vision based relative navigation for close-formation flight missions[C]//Proc. of the AIAA Scitech Forum, 2020: 234-245. |
| 26 |
GUO K X , QIU Z R , MENG W , et al. Ultra-wideband based cooperative relative localization algorithm and experiments for multiple unmanned aerial vehicles in GPS denied environments[J]. International Journal of Micro Air Vehicles, 2017, 9 (3): 169- 186.
doi: 10.1177/1756829317695564 |
| 27 |
DEHGHANI M A , MENHAJ M B . Stability of cooperative unmanned aerial vehicles based on relative measurements[J]. Procee-dings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2018, 232 (15): 2784- 2792.
doi: 10.1177/0954410017716477 |
| 28 | DUAN H B, LUO Q N. Integrated localization system for autonomous unmanned aerial vehicle formation flight[C]//Proc. of the IEEE 12th International Conference on Control and Automation, 2016: 395-400. |
| 29 |
WANG R , DU J N , XIONG Z , et al. Hierarchical collaborative navigation method for UAV swarm[J]. Journal of Aerospace Engineering, 2021, 34 (1): 04020097.
doi: 10.1061/(ASCE)AS.1943-5525.0001216 |
| 30 | OKTAY H, STEPANIAK M. Airborne pseudolites in a global positioning system degraded environment[C]//Proc. of the IEEE 5th International Conference on Recent Advances in Space Technologies, 2011: 280-285. |
| 31 |
INDELMAN V , WILLIAMS S , KAESS M , et al. Information fusion in navigation systems via factor graph based incremental smoothing[J]. Robotics and Autonomous Systems, 2013, 61 (8): 721- 738.
doi: 10.1016/j.robot.2013.05.001 |
| 32 | XIAO Y I , YOU H E , XIN G . Federated filtering algorithm based on different local model[J]. Journal of Chinese Inertial Technology, 2002, 10 (5): 16- 19. |
| 33 | 林雪原. 组合导航及其信息融合方法[M]. 北京: 国防工业出版社, 2017. |
| LIN X Y . Integrated navigation and its information fusion method[M]. Beijing: National Defense Industry Press, 2017. |
| [1] | Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME [J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902. |
| [2] | Geng XU, Yongxu HE, Yonggang ZHANG. Inertial-frame-based transfer alignment using Rodriguez parameters [J]. Systems Engineering and Electronics, 2022, 44(9): 2903-2913. |
| [3] | Zukun LU, Haiyu GUO, Jie SONG, Yifan SUN, Baiyu LI. Optimal front-end gain of anti-jamming satellite navigation receiver [J]. Systems Engineering and Electronics, 2022, 44(7): 2270-2275. |
| [4] | Pengbo WANG, Chengyan HE, Qianqian YANG, Wenhua TONG. Impact of narrowband interference on the BDS-3 B2 signal quality [J]. Systems Engineering and Electronics, 2022, 44(7): 2286-2292. |
| [5] | Haolun GU, Guorong ZHAO, Jinbo YAO, Chao GAO. Cross layer MAC protocol design of NNSs based on graded nodes [J]. Systems Engineering and Electronics, 2022, 44(7): 2329-2340. |
| [6] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [7] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [8] | Zhe LIANG, Zhaofa ZHOU, Zhihao XU, Wenting LYU, Hui DUAN. Angular rate attitude algorithm based on multi-interval information correction [J]. Systems Engineering and Electronics, 2022, 44(5): 1636-1643. |
| [9] | Yang LI, Meng LIU, Jing GONG, Yongzhao WANG, Fujian DENG. Double-velocity inertial-frame alignment algorithm with pseudo INS modeling in polar regions [J]. Systems Engineering and Electronics, 2022, 44(5): 1677-1684. |
| [10] | Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network [J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309. |
| [11] | Hongze ZHAO, Guanghui WEI, Xue DU, Jianyong ZHENG, Mei LI. Analysis of third-order intermodulation blocking effect for satellite navigation receiver [J]. Systems Engineering and Electronics, 2022, 44(4): 1336-1342. |
| [12] | Dong FU, Jing PENG, Ming MA, Feiqiang CHEN, Gang OU. GNSS time spoofing detection and discrimination based on clock bias hypothesis test [J]. Systems Engineering and Electronics, 2022, 44(3): 948-955. |
| [13] | Xingjia YANG, Keqing DUAN, Xiang LI, Wei QI. Resolving range ambiguity for cooperative detection using UAV swarms [J]. Systems Engineering and Electronics, 2022, 44(2): 480-489. |
| [14] | Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance [J]. Systems Engineering and Electronics, 2022, 44(2): 529-537. |
| [15] | Yude NI, Ling ZOU, Ruihua LIU, Wantong CHEN, Zhe QIN, Kai WANG. C-band navigation signal modulation mode and performance evaluation of BeiDou system [J]. Systems Engineering and Electronics, 2022, 44(12): 3800-3810. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||