Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (5): 1677-1684.doi: 10.12305/j.issn.1001-506X.2022.05.30
• Guidance, Navigation and Control • Previous Articles Next Articles
Double-velocity inertial-frame alignment algorithm with pseudo INS modeling in polar regions
Yang LI1, Meng LIU2,3,*, Jing GONG2,3, Yongzhao WANG2,3, Fujian DENG2,3
- 1. Naval Research Institute, Beijing 100161, China
2. Tianjin Navigation Instrument Research Institute, Tianjin 300131, China
3. Laboratory of Science and Technology on Marine Navigation and Control, China State Shipbuilding Corporation, Tianjin 300131, China
-
Received:2021-04-22Online:2022-05-01Published:2022-05-16 -
Contact:Meng LIU
CLC Number:
Cite this article
Yang LI, Meng LIU, Jing GONG, Yongzhao WANG, Fujian DENG. Double-velocity inertial-frame alignment algorithm with pseudo INS modeling in polar regions[J]. Systems Engineering and Electronics, 2022, 44(5): 1677-1684.
share this article
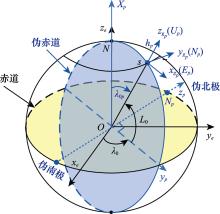
Fig.1
The pseudo Earth frame"
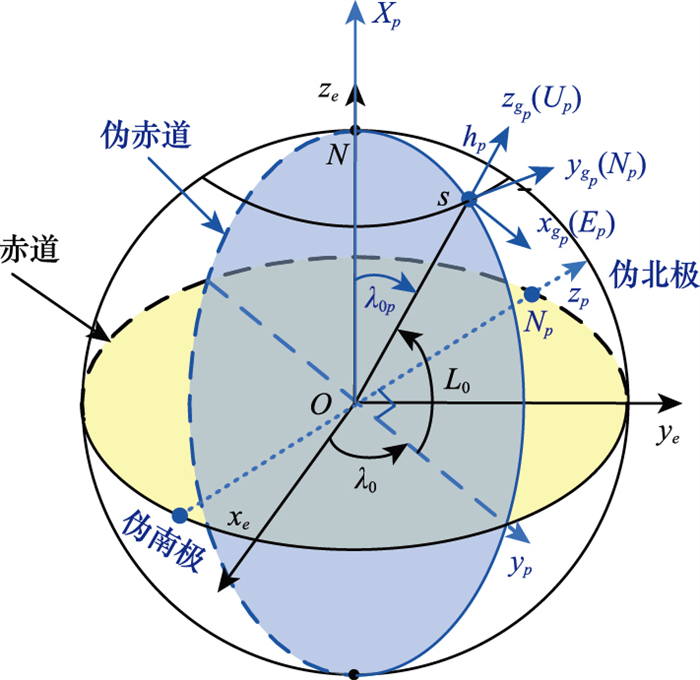
Fig.2
Multistage double-velocity inertial-frame alignment with the pseudo INS modeling"
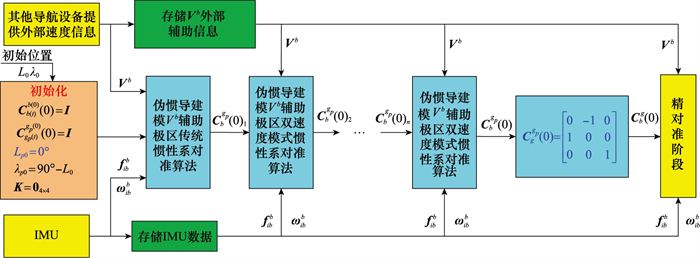

Fig.3
MAE of the attitude matrix Cbg(0)"


Fig.4
STD of the initial attitude matrix Cbg(0)"
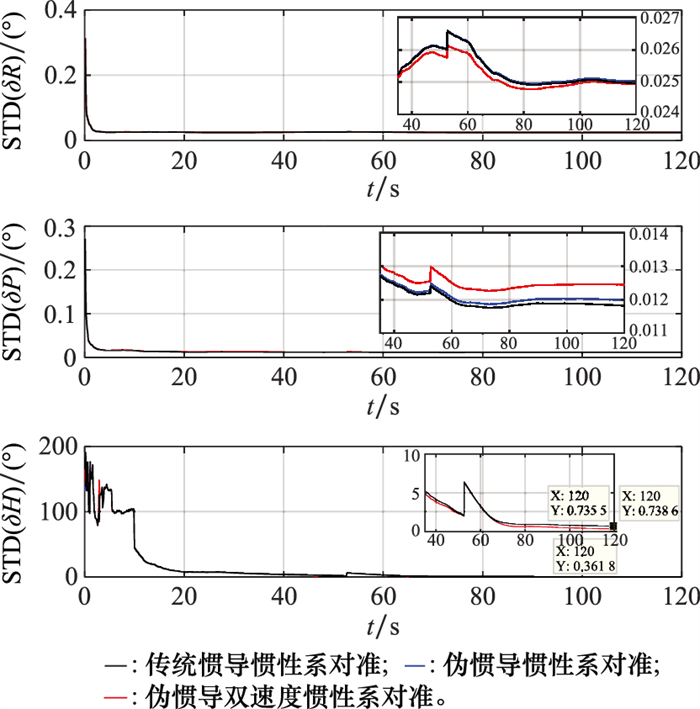
Table 1
Statistics of 10 alignment errors for initial attitude matrix Cbg(0) (°)"
| 对准算法 | 姿态 | MAE | 均值 | STD | 最大值 | 最小值 |
| 传统地球坐标 系惯性系对准 | 横摇(R) | 0.025 5 | -0.019 4 | 0.025 0 | 0.028 2 | -0.058 3 |
| 横摇(P) | 0.009 3 | -0.002 5 | 0.011 8 | 0.011 6 | -0.022 1 | |
| 航向(H) | 0.659 4 | 0.263 4 | 0.738 6 | 1.156 8 | -1.120 7 | |
| 伪惯导建模 惯性系对准 | 横摇(R) | 0.025 6 | -0.019 4 | 0.025 0 | 0.028 7 | -0.058 3 |
| 横摇(P) | 0.009 4 | -0.002 4 | 0.012 0 | 0.011 7 | -0.022 3 | |
| 航向(H) | 0.656 8 | 0.264 9 | 0.735 5 | 1.165 2 | -1.115 3 | |
| 伪惯导建模双 速度模式惯性 系对准 | 横摇(R) | 0.025 2 | -0.018 7 | 0.025 0 | 0.029 2 | -0.057 3 |
| 横摇(P) | 0.010 3 | 0.002 8 | 0.012 5 | 0.029 2 | -0.57 3 | |
| 航向(H) | 0.319 4 | 0.180 7 | 0.361 8 | 0.690 9 | -0.303 5 |
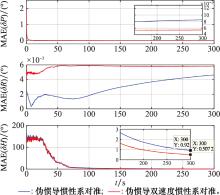
Fig.5
MAE of 50 alignment errors for attitude matrix Cbg(0) in 75° latitude"
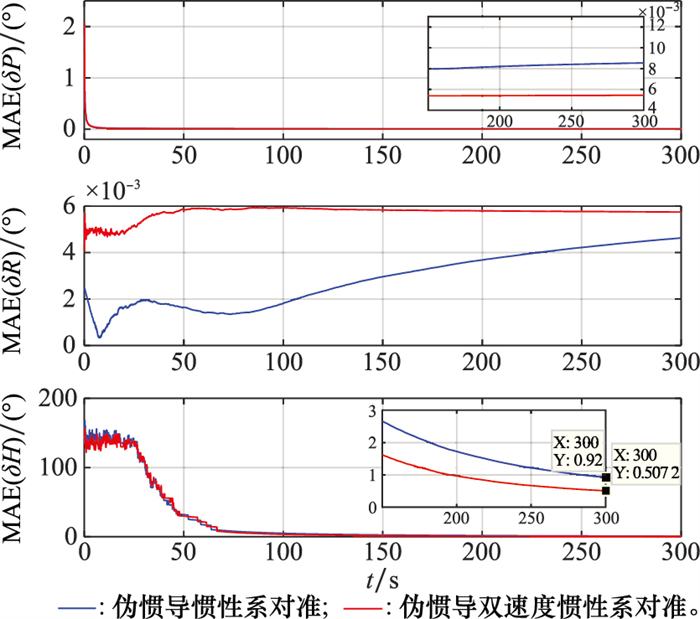
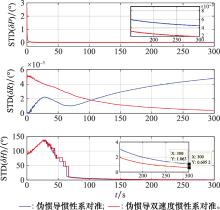
Fig.6
STD of 50 alignment errors for attitude matrix Cbg(0) in 75° latitude"
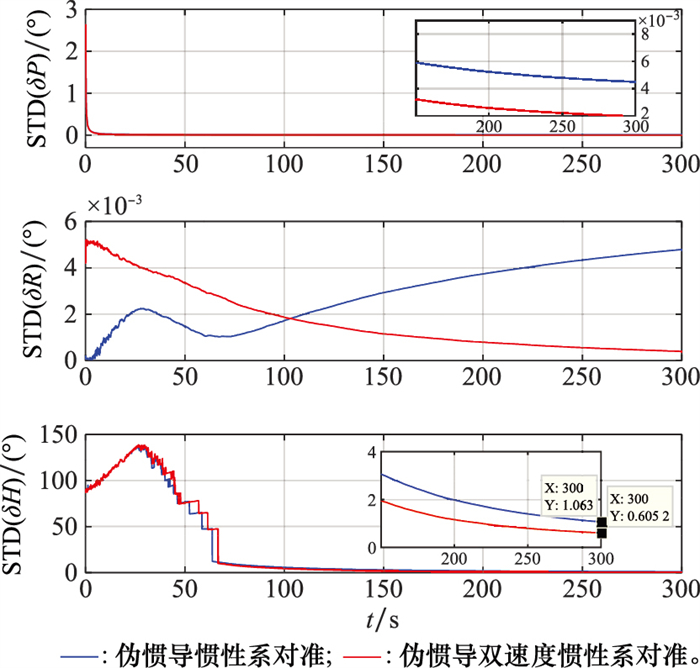

Fig.7
MAE of 50 alignment errors for attitude matrix Cbg(0) in 85° latitude"
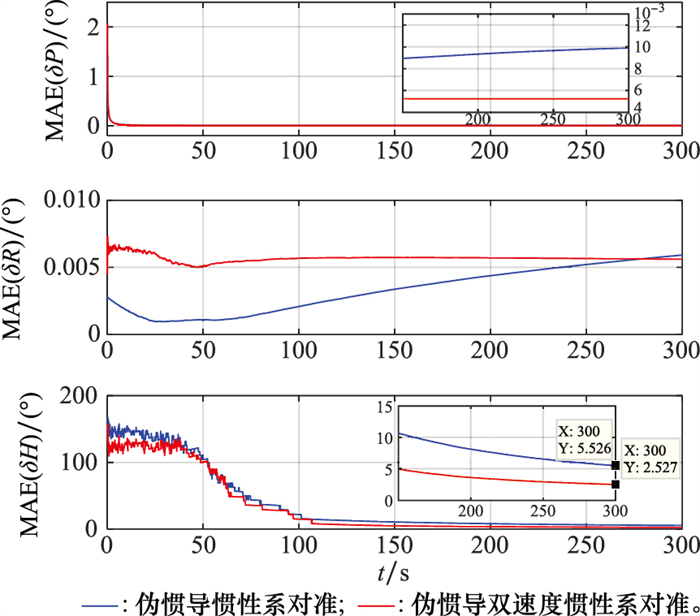
Fig.8
STD of 50 alignment errors for attitude matrix Cbg(0) in 85° latitude"
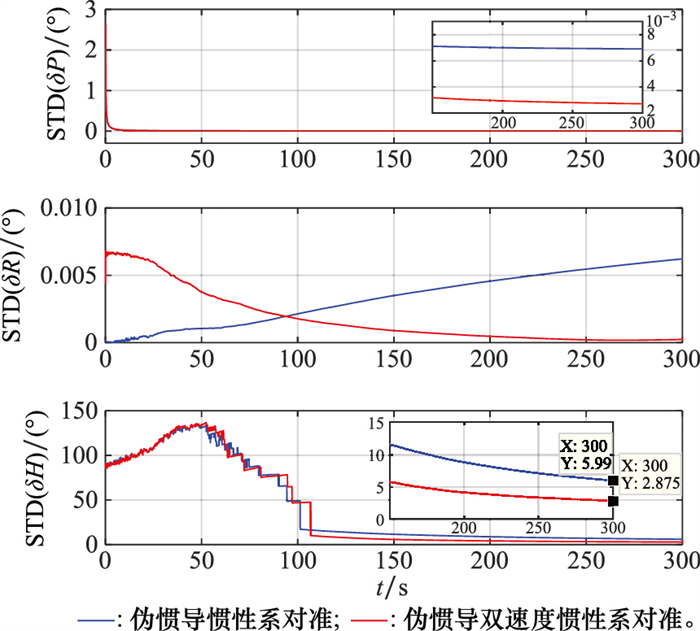
Table 2
Statistics of 50 heading alignment errors based on the double-velocity inertial-frame alignment with the pseudo INS modeling (°)"
| 对准算法 | 初始纬度L0 | MAE | 均值 | STD | 最大值 | 最小值 |
| 伪惯导建模对准 | 75 | 0.920 0 | -0.159 1 | 1.062 9 | 1.679 7 | -2.076 1 |
| 85 | 5.525 9 | -1.292 6 | 5.990 1 | 7.909 8 | -10.429 6 | |
| 伪惯导建模的双速度模式对准 | 75 | 0.507 2 | 0.053 2 | 0.605 2 | 1.410 8 | -1.055 2 |
| 85 | 2.527 3 | -0.132 9 | 2.874 6 | 5.590 3 | -4.808 1 |
| 1 |
朱启举, 秦永元, 周琪. 极区航空导航综述[J]. 测控技术, 2014, 33 (10): 5- 8.
doi: 10.3969/j.issn.1000-8829.2014.10.002 |
|
ZHU Q J , QIN Y Y , ZHOU Q . Summary of polar air navigation[J]. Measurement & Control Technology, 2014, 33 (10): 5- 8.
doi: 10.3969/j.issn.1000-8829.2014.10.002 |
|
| 2 |
LI G Z , NING B Q , REN Z D , et al. Statistics of GPS ionospheric scintillation and irregularities over polar regions at solar minimum[J]. GPS Solutions, 2010, 14 (4): 331- 341.
doi: 10.1007/s10291-009-0156-x |
| 3 |
YAO Y Q , XU X S , YAO L , et al. Transverse navigation under the ellipsoidal earth model and its performance in both polar and non-polar areas[J]. Journal of Navigation, 2016, 69 (2): 335- 352.
doi: 10.1017/S0373463315000715 |
| 4 |
DU T , TIAN C Z , YANG J , et al. An autonomous initial alignment and observability analysis for SINS with bio-inspired pola-rized skylight sensors[J]. IEEE Sensors Journal, 2020, 20 (14): 7941- 7956.
doi: 10.1109/JSEN.2020.2981171 |
| 5 | LIU M , LI G C , GAO Y B , et al. Improved polar inertial navigation algorithm based on pseudo INS mechanization[J]. Aerospace Science and Technology, 2018, 77 (6): 105- 116. |
| 6 |
LI J , SONG N F , YANG G L , et al. In-flight initial alignment scheme for radar-aided SINS in the arctic[J]. IET Signal Processing, 2016, 10 (8): 990- 999.
doi: 10.1049/iet-spr.2015.0497 |
| 7 |
CHANG L B , HE H Y , QIN F J . In-motion initial alignment for odometer-aided strapdown inertial navigation system based on attitude estimation[J]. IEEE Sensors Journal, 2017, 17 (3): 766- 773.
doi: 10.1109/JSEN.2016.2633428 |
| 8 |
ZHANG Q , LI S S , XU Z P , et al. Velocity-based optimization-based alignment (VBOBA) of low-end MEMS IMU/GNSS for low dynamic applications[J]. IEEE Sensors Journal, 2020, 20 (10): 5527- 5539.
doi: 10.1109/JSEN.2020.2970277 |
| 9 | WANG J , ZHANG T , TONG J W , et al. A fast SINS self-alignment method under geographic latitude uncertainty[J]. IEEE Sensors Journal, 2019, 20 (6): 2885- 2894. |
| 10 |
XU X , XU D C , ZHANG T , et al. In-motion coarse alignment method for SINS/GPS using position loci[J]. IEEE Sensors Journal, 2019, 19 (10): 3930- 3938.
doi: 10.1109/JSEN.2019.2896274 |
| 11 | 严恭敏, 李思锦, 高文劭, 等. 纬度未知条件下的抗扰动惯性系初始对准改进方法[J]. 中国惯性技术学报, 2020, (2): 141- 146. |
| YAN G M , LI S J , GAO W S , et al. An improvement for SINS anti-rocking alignment under geographic latitude uncertainty[J]. Journal of Chinese Inertial Techndogy, 2020, (2): 141- 146. | |
| 12 |
LIU B Q , WEI S H , LU J Z , et al. Fast self-alignment technology for hybrid inertial navigation systems based on a new two-position analytic method[J]. IEEE Trans.on Industrial Electronics, 2020, 67 (4): 3226- 3235.
doi: 10.1109/TIE.2019.2910045 |
| 13 |
HAO S W , ZHOU Z F , ZHANG Z L , et al. Analysis of gravity disturbance compensation for initial alignment of INS[J]. IEEE Access, 2020, 8, 137812- 137824.
doi: 10.1109/ACCESS.2020.3012450 |
| 14 |
CHANG L B , LI J S , CHEN S Y . Initial alignment by attitude estimation for strapdown inertial navigation systems[J]. IEEE Trans.on Instrumentation and Measurement, 2015, 64 (3): 784- 794.
doi: 10.1109/TIM.2014.2355652 |
| 15 | 薛海建, 何利益, 孙锦海, 等. 里程计辅助的SINS行进间对准方法[J]. 兵工自动化, 2019, 38 (5): 5- 10. |
| XUE H J , HE L Y , SUN J H , et al. In-motion alignment method for SINS aided by odometer[J]. Ordnance Industry Automation, 2019, 38 (5): 5- 10. | |
| 16 |
XU X , SUN Y F , GUI J , et al. A fast robust in-motion alignment method for SINS with DVL aided[J]. IEEE Trans.on Vehicular Technology, 2020, 69 (4): 3816- 3827.
doi: 10.1109/TVT.2020.2974524 |
| 17 | CHENG J H , WANG T D , GUAN D X , et al. Polar transfer alignment of shipborne SINS with a large misalignment angle[J]. Measurement Science & Technology, 2016, 27 (3): 1- 12. |
| 18 |
YAN Z P , WANG L , WANG T D , et al. A polar initial alignment algorithm for unmanned underwater vehicles[J]. Sensors, 2017, 17 (12): 2709.
doi: 10.3390/s17122709 |
| 19 | 刘猛, 胡小毛, 郭猛, 等. 基于双速度模式的多级惯性系动基座粗对准算法[J]. 中国惯性技术学报, 2020, 28 (2): 159- 164. |
| LIU M , HU X M , GUO M , et al. Multistage inertial-frame dynamic coarse alignment algorithm with double-velocity model[J]. Journal of Chinese Inertial Technology, 2020, 28 (2): 159- 164. | |
| 20 | WANG Y G, YANG J S. Self-alignment algorithm for strap down inertial navigation system under strong flurry interference[C]//Proc. of the Applied Mechanics and Materials, 2013: 3667-3671. |
| 21 |
LU B F , WANG Q Y , YU C M , et al. Optimal parameter design of coarse alignment for fiber optic gyro inertial navigation system[J]. Sensors, 2015, 15 (7): 15006- 15032.
doi: 10.3390/s150715006 |
| 22 |
YAO Y Q , XU X S , YANG D K , et al. An IMM-UKF aided SINS/USBL calibration solution for underwater vehicles[J]. IEEE Trans.on Vehicular Technology, 2020, 69 (4): 3740- 3747.
doi: 10.1109/TVT.2020.2972526 |
| 23 |
CHE Y T , WANG Q Y , GAO W , et al. An improved inertial frame alignment algorithm based on horizontal alignment information for marine SINS[J]. Sensors, 2015, 15 (10): 25520- 25545.
doi: 10.3390/s151025520 |
| 24 |
LUO L , HUANG Y L , ZHANG Z , et al. A new Kalman filter-based in-motion initial alignment method for DVL-aided low-cost SINS[J]. IEEE Trans.on Vehicular Technology, 2021, 70 (1): 331- 343.
doi: 10.1109/TVT.2020.3048730 |
| 25 |
HUANG Y L , ZHANG Z , DU S Y , et al. A high-accuracy gps-aided coarse alignment method for MEMS-based SINS[J]. IEEE Trans.on Instrumentation and Measurement, 2020, 69 (10): 7914- 7932.
doi: 10.1109/TIM.2020.2983578 |
| 26 |
LU J Z , XIE L L , LI B G . Analytic coarse transfer alignment based on inertial measurement vector matching and real-time precision evaluation[J]. IEEE Trans.on Instrumentation and Measurement, 2016, 65 (2): 355- 364.
doi: 10.1109/TIM.2015.2502879 |
| 27 |
LU J Z , XIE L L , LI B G . Applied quaternion optimization method in transfer alignment for airborne ahrs under large misalignment angle[J]. IEEE Trans.on Instrumentation and Measurement, 2016, 65 (2): 346- 354.
doi: 10.1109/TIM.2015.2502838 |
| 28 |
HUANG W Q , LI M H , et al. A self-alignment method of MEMS biaxial rotation modulation strapdown compass for marine applications[J]. IEEE Access, 2019, 7, 151595- 151609.
doi: 10.1109/ACCESS.2019.2948230 |
| 29 |
BEN Y Y , HUANG L , YANG X L . A rapid damping method for a marine strapdown INS[J]. Ocean Engineering, 2016, 114, 259- 268.
doi: 10.1016/j.oceaneng.2016.01.027 |
| 30 |
HUANG Y L , ZHANG Y G , WANG X D . Kalman-filterin g-based in-motion coarse alignment for odometer-aided SINS[J]. IEEE Trans.on Instrumentation and Measurement, 2017, 66 (12): 3364- 3377.
doi: 10.1109/TIM.2017.2737840 |
| 31 |
CHANG L B , LI Y , XUE B Y . Initial alignment for a Doppler velocity log-aided strapdown inertial navigation system with limited information[J]. IEEE/ASME Trans.on Mechatronics, 2017, 22 (1): 329- 338.
doi: 10.1109/TMECH.2016.2616412 |
| 32 |
XU X , LU J Y , ZHANG T . A fast-initial alignment method with angular rate aiding based on robust Kalman filter[J]. IEEE Access, 2019, 7, 51369- 51378.
doi: 10.1109/ACCESS.2019.2910275 |
| [1] | CHEN He, ZHANG Zhili, ZHOU Zhaofa, LIU Pengpeng, ZHAO Junyang. Equivalence analysis between two quaternion based coarse alignment algorithms for SINS with inertial frame [J]. Systems Engineering and Electronics, 2018, 40(5): 1098-1103. |
| [2] |
BEN Yueyang, SUN Yan, WANG Xiangyu, CHEN Hainan, YANG Lisheng, LIU Zhenghao.
Method of coarse alignment during voyages of vessel SINS aided by satellites
[J]. Systems Engineering and Electronics, 2018, 40(12): 2797-2803.
|
| [3] | TAN Cai-ming, WANG Yu, SU Yan, ZHU Xin-hua, WEI Guo. Improved inertial coarse alignment algorithm with suppression of linear vibration [J]. Systems Engineering and Electronics, 2016, 38(1): 142-146. |
| [4] | SUN Feng,SUN Wei. Coarse alignment of SINS based on IMU single-axial rotation [J]. Journal of Systems Engineering and Electronics, 2010, 32(6): 1272-1276. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||