Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (6): 1994-2000.doi: 10.12305/j.issn.1001-506X.2022.06.27
• Guidance, Navigation and Control • Previous Articles Next Articles
MEMS-INS/GNSS/VO integrated navigation method based on robust EKF
Wenhua LI, Lixin WANG*, Qiang SHEN, Can LI, Zongshou WU
- College of Missile Engineering, Rocket Force Engineering University, Xi'an 710025, China
-
Received:2021-05-21Online:2022-05-30Published:2022-05-30 -
Contact:Lixin WANG
CLC Number:
Cite this article
Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF[J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000.
share this article

Fig.1
Motion trajectory"
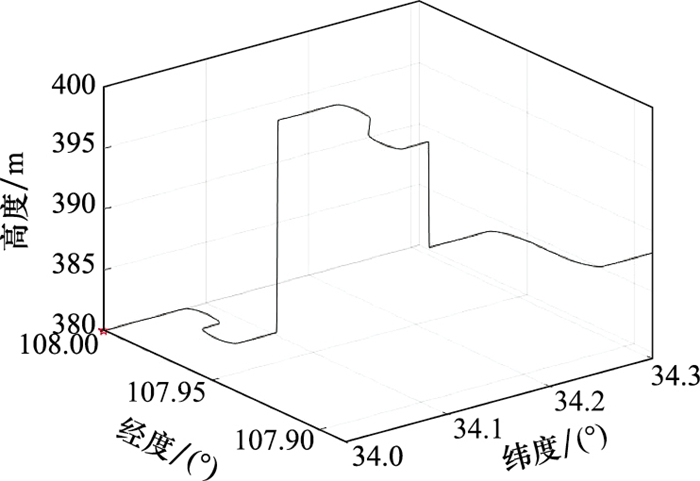
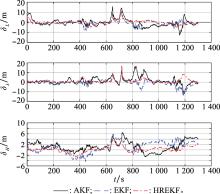
Fig.2
Position error of simulation test"
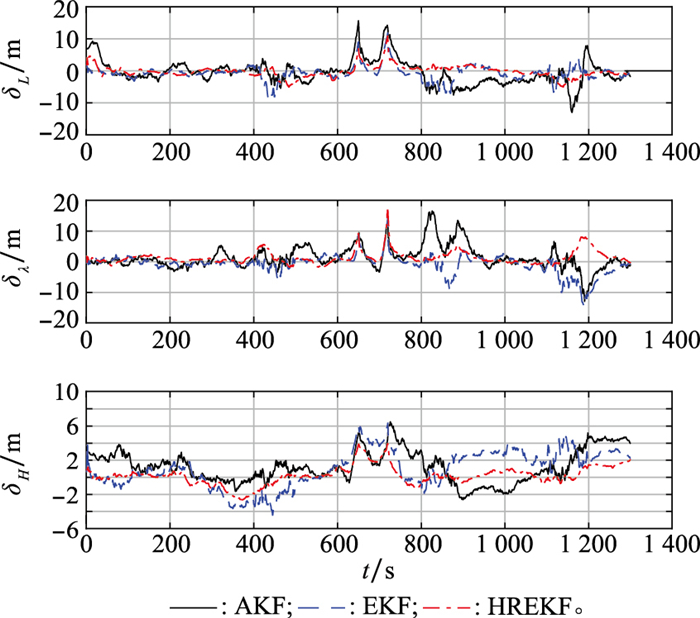
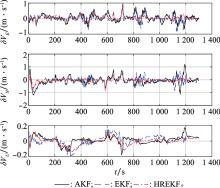
Fig.3
Speed error of simulation test"
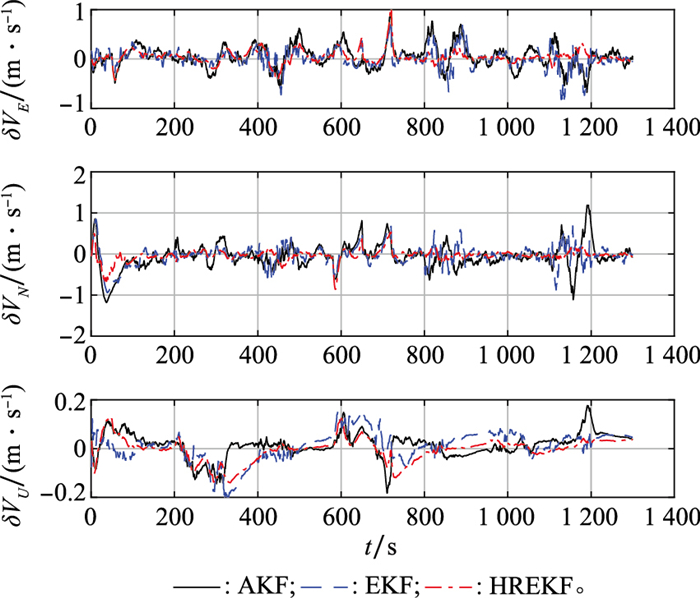
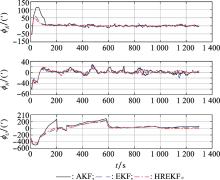
Fig.4
Attitude error of simulation test"
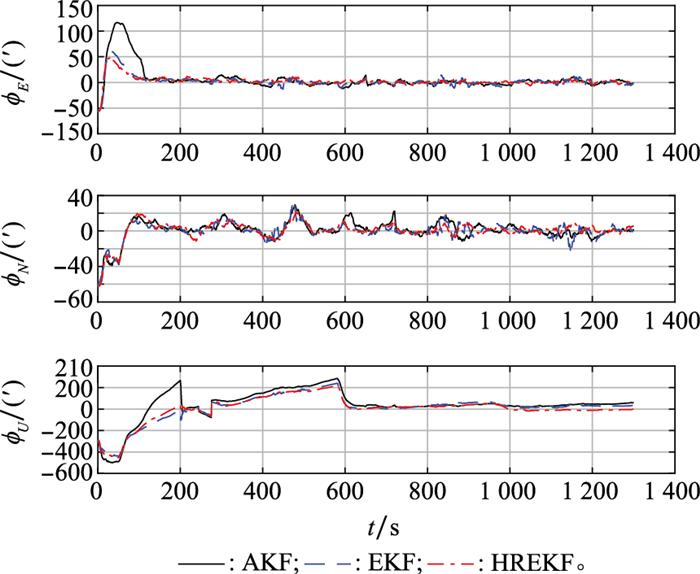
Table 1
RMSE of parameters in simulation test"
| 导航参数 | 全时段 | 混合高斯噪声 | 4倍初始误差 | ||||||||
| AKF | EKF | HREKF | AKF | EKF | HREKF | AKF | EKF | HREKF | |||
| 俯仰角/(′) | 22.601 2 | 11.149 3 | 9.132 0 | 3.908 3 | 4.032 9 | 3.035 7 | 5.028 8 | 5.243 4 | 2.870 2 | ||
| 横滚角/(′) | 10.772 0 | 9.836 7 | 9.514 8 | 9.870 8 | 6.408 9 | 4.936 5 | 4.607 1 | 4.807 2 | 4.188 5 | ||
| 偏航角/(′) | 141.239 9 | 120.701 6 | 118.026 9 | 32.033 1 | 33.150 9 | 28.870 6 | 41.239 0 | 28.126 9 | 10.707 1 | ||
| 东速/(m·s-1) | 0.252 0 | 0.212 3 | 0.199 6 | 0.403 7 | 0.318 6 | 0.095 8 | 0.302 8 | 0.305 6 | 0.136 5 | ||
| 北速/(m·s-1) | 0.332 9 | 0.283 7 | 0.162 7 | 0.287 0 | 0.275 8 | 0.093 5 | 0.561 4 | 0.320 7 | 0.084 6 | ||
| 天速/(m·s-1) | 0.059 5 | 0.065 0 | 0.047 9 | 0.026 2 | 0.028 8 | 0.010 1 | 0.075 9 | 0.037 2 | 0.017 4 | ||
| 纬度/(°) | 4.847 7 | 2.920 6 | 2.332 4 | 4.669 6 | 4.208 8 | 1.045 9 | 5.829 9 | 2.344 1 | 2.908 4 | ||
| 经度/(°) | 4.329 3 | 3.442 5 | 3.146 8 | 7.994 8 | 3.791 3 | 2.571 6 | 4.856 5 | 5.077 7 | 4.072 3 | ||
| 高度/m | 2.336 2 | 2.278 1 | 1.365 5 | 1.540 5 | 1.443 4 | 0.327 6 | 2.285 7 | 3.054 6 | 0.581 1 | ||
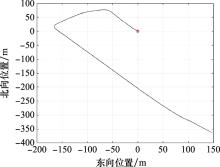
Fig.5
Trajectory of drive_0036"
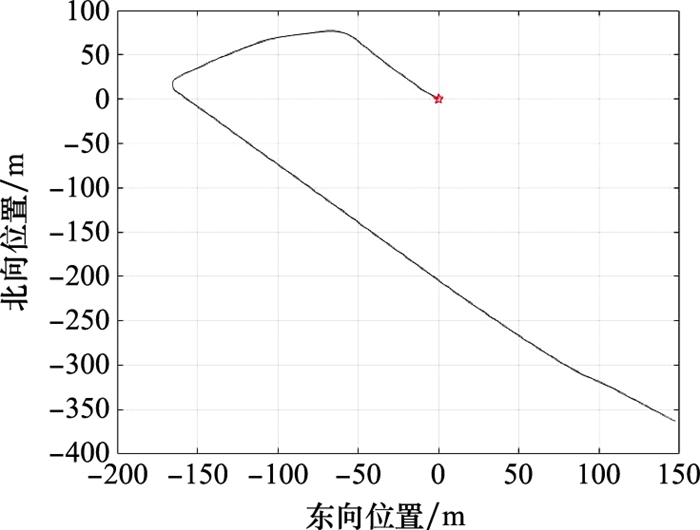

Fig.6
Trajectory of drive_0033"
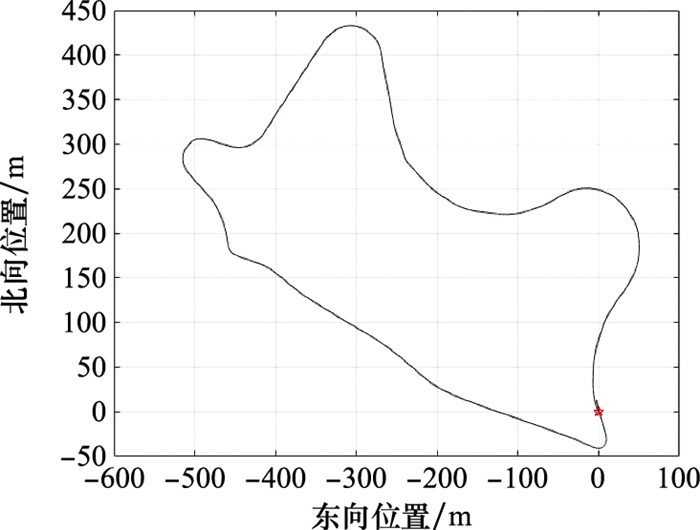
Fig.7
Horizontal position error of drive_0036"
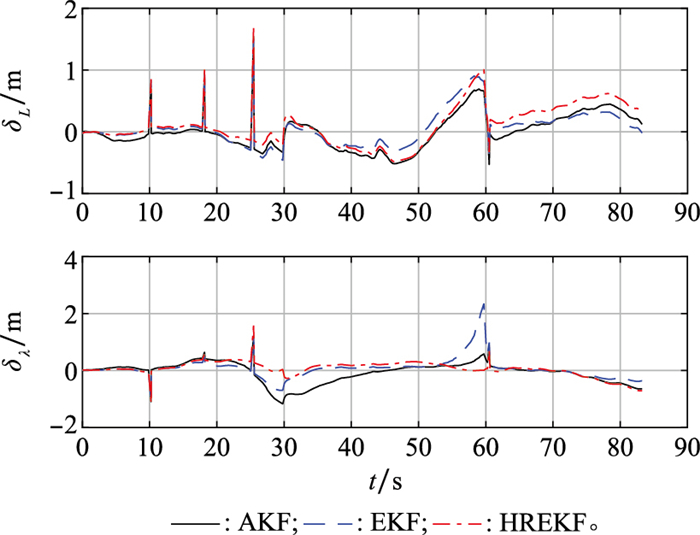

Fig.8
Horizontal speed error of drive_0036"
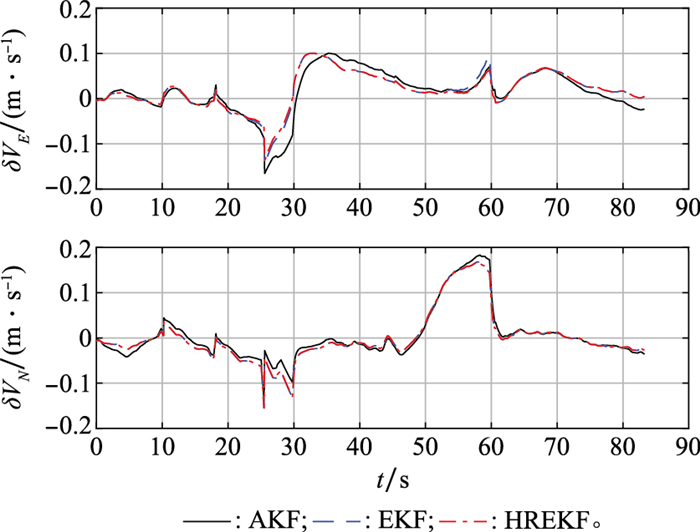
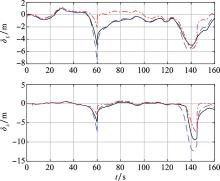
Fig.9
Horizontal position error of drive_0033"
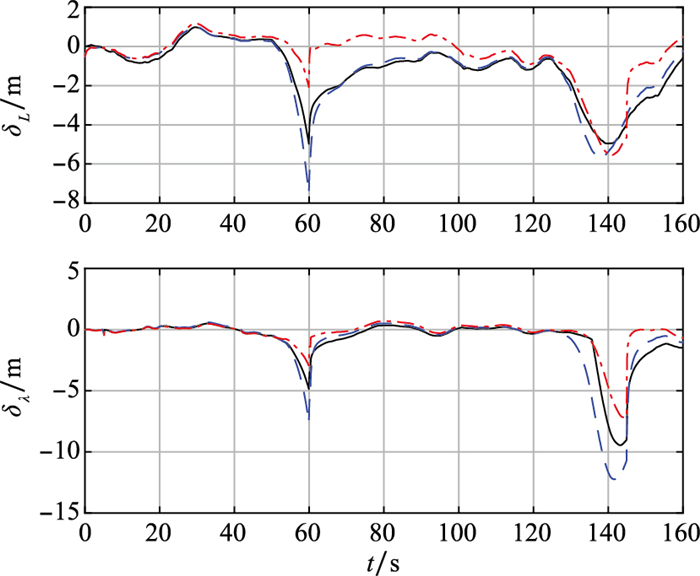
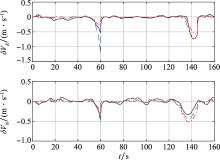
Fig.10
Horizontal speed error of drive_0033"
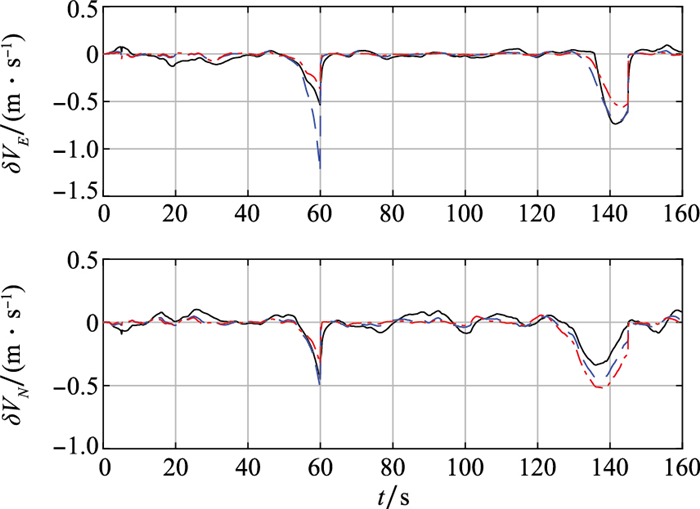
Table 2
RMSE of parameters in drive_0033"
| 导航参数 | AKF | EKF | HREKF |
| 东速/(m·s-1) | 2.057 8 | 1.974 1 | 1.966 0 |
| 北速/(m·s-1) | 2.505 0 | 2.639 5 | 1.699 0 |
| 纬度/(°) | 0.924 5 | 0.932 0 | 0.902 0 |
| 经度/(°) | 1.760 9 | 1.730 9 | 1.715 3 |
| 1 | 严恭敏, 邓瑀. 传统组合导航中的实用Kalman滤波技术评述[J]. 导航定位与授时, 2020, 7 (2): 50- 64. |
| YAN G M , DENG Y . Review on practical Kalman filtering techniques in traditional integrated navigation system[J]. Navigation Positioning and Timing, 2020, 7 (2): 50- 64. | |
| 2 | 李灿, 沈强, 秦伟伟, 等. 基于平滑变结构-卡尔曼滤波的MIMU/BDS组合导航技术[J]. 航空兵器, 2021, 28 (3): 51- 58. |
| LI C , SHEN Q , QIN W W , et al. MIMU/BDS integrated navigation technology based on smooth variable structure-adaptive Kalman filter[J]. Aero Weaponry, 2021, 28 (3): 51- 58. | |
| 3 | 龙腾, 穆荣军, 苏炳志, 等. 双天线GPS/MEMS-INS深组合导航方法研究[J]. 宇航学报, 2021, 42 (1): 92- 102. |
| LONG T , MU R J , SU B Z , et al. Research on dual-antenna GPS/MEMS-INS deeply integrated navigation approach[J]. Journal of Astronautics, 2021, 42 (1): 92- 102. | |
| 4 |
LI Z K , ZAN L , LONG Z . Improved robust Kalman filter for state model errors in GNSS-PPP/MEMS-IMU double state integrated navigation[J]. Advances in Space Research, 2021, 67 (10): 3156- 3168.
doi: 10.1016/j.asr.2021.02.010 |
| 5 | 张礼廉, 屈豪, 毛军, 等. 视觉/惯性组合导航技术发展综述[J]. 导航定位与授时, 2020, 7 (4): 50- 63. |
| ZHANG L L , QU H , MAO J , et al. A survey of visual-inertial integrated navigation technology[J]. Navigation Positioning and Timing, 2020, 7 (4): 50- 63. | |
| 6 |
LIN X , LI W , LI S D , et al. Combined adaptive robust Kalman filter algorithm[J]. Measurement Science and Technology, 2021, 32 (7): 075015.
doi: 10.1088/1361-6501/abf57c |
| 7 | 苏敬, 何华锋, 何耀民, 等. 考虑SAR量测特性的弹载SINS/SAR组合导航滤波算法[J]. 系统工程与电子技术, 2021, 43 (4): 1044- 1049. |
| SU J , HE H F , HE Y M , et al. Filtering algorithm of missile-borne SINS/SAR integrated navigation considering SAR mea-surement characteristics[J]. Systems Engineering and Electro-nics, 2021, 43 (4): 1044- 1049. | |
| 8 | 严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019. |
| YAN G M , WENG J . Strapdown inertial navigation algorithm and integrated navigation principle[M]. Xi'an: Northwestern Polytechnical University Press, 2019. | |
| 9 |
CHEN K , CHANG G B , CHEN C , et al. An improved TDCP-GNSS/INS integration scheme considering small cycle slip for low-cost land vehicular applications[J]. Measurement Science and Technology, 2021, 32 (5): 055006.
doi: 10.1088/1361-6501/abd96c |
| 10 | HRUSTIC E , ABDALLAH R B , VILAVALLS J , et al. Robust linearly constrained extended Kalman filter for mismatched nonlinear systems[J]. International Journal of Robust and Nonlinear Control, 2020, 31 (3): 787- 805. |
| 11 |
ABDALLAH R B , VILÀ-VALLS J , PAGES G , et al. Robust LCEKF for mismatched nonlinear systems with non-additive noise/inputs and its application to robust vehicle navigation[J]. Sensors, 2021, 21 (6): 2086.
doi: 10.3390/s21062086 |
| 12 | HUBER P . Robust estimation of a location parameter[J]. Annals of Mathematical Statistics, 1964, 35 (2): 73- 101. |
| 13 | 朱兵, 李星, 刘强, 等. 鲁棒Kalman滤波及其在水下组合导航中的应用[J]. 导航定位与授时, 2021, 8 (1): 96- 103. |
| ZHU B , LI X , LIU Q , et al. Robust Kalman filter and its application in underwater intergrated navigation[J]. Navigation Positioning and Timing, 2021, 8 (1): 96- 103. | |
| 14 | 高敬东, 李开龙, 常路宾. 基于Huber的改进鲁棒滤波算法[J]. 系统仿真学报, 2014, 26 (8): 1769- 1774. |
| GAO J D , LI K L , CHANG L B . Huber-based modified robust filter algorithm[J]. Journal of System Simulation, 2014, 26 (8): 1769- 1774. | |
| 15 |
ZHU B , CHANG L B , XU J N , et al. Huber-based adaptive unscented Kalman filter with non-Gaussian measurement noise[J]. Circuits Systems and Signal Process, 2018, 37 (9): 3842- 3861.
doi: 10.1007/s00034-017-0736-x |
| 16 | WANG J Y , XU T H , WANG Z J . Adaptive robust unscen-ted Kalman filter for AUV acoustic navigation[J]. Sensors, 2020, 20 (1): 60. |
| 17 | PENG D D , ZHOU T , FOLKESSON J , et al. Robust particle filter based on Huber function for underwater terrain-aided navi-gation[J]. IET Radar, Sonar & Navigation, 2019, 13 (11): 1867- 1875. |
| 18 | ROMMEL T , HUBER S , YOUNIS M , et al. Matrix pencil method for topography-adaptive digital beam-forming in synthetic aperture radar[J]. IET Radar, Sonar & Navigation, 2021, 15 (10): 1195- 1208. |
| 19 |
MU R J , SU B Z , CHEN J Y , et al. Multiple-step randomly delayed adaptive robust filter with application to INS/VNS integrated navigation on asteroid missions[J]. IEEE Access, 2020, 8, 118853- 118868.
doi: 10.1109/ACCESS.2020.3004575 |
| 20 |
XU B , RAZZAQI A A , LIU Y L . Cooperative localisation of AUVs based on Huber-based robust algorithm and adaptive noise estimation[J]. The Journal of Navigation, 2019, 72 (4): 875- 893.
doi: 10.1017/S0373463319000018 |
| 21 | PENG D , ZHOU T , FOLKESSON J , et al. Robust particle filter based on Huber function for underwater terrain-aided navi-gation[J]. IET Radar, Sonar & Navigation, 2019, 13 (11): 1867- 1875. |
| 22 | LI Y D , HOU L H , YANG Y , et al. Huber's M-estimation-based cubature Kalman filter for an INS/DVL integrated system[J]. Mathematical Problems in Engineering, 2020, 8, 1- 12. |
| 23 | 文坤. 多状态多视图约束视觉/惯性组合导航算法研究[D]. 长沙: 国防科学技术大学, 2016. |
| WEN K. Research on multi-state and multi-view constraint algorithms for vision/inertial integrated navigation[D]. Changsha: National University of Defense Technology, 2016. | |
| 24 | TARDIF J P, GEORGE M, LAVERNE M, et al. A new approach to vision-aided inertial navigation[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010. |
| 25 | SOLAJ, VIDAL-CALLEJA T A, DEVY M. Undelayed initia-lization of line segments in monocular SLAM[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2009. |
| 26 | SIRTKAYA S, SEYMEN B, ALATAN A A. loosely coupled Kalman filtering for fusion of visual odometry and inertial navigation[C]//Proc. of the International Conference on Information Fusion, 2013. |
| 27 |
CHANG G B . Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion[J]. Journal of Geodesy, 2014, 88 (4): 391- 401.
doi: 10.1007/s00190-013-0690-8 |
| 28 |
ZHU B , WU M , XU J N , et al. Robust adaptive unscented Kalman filter and its application in initial alignment for body frame velocity aided strapdown inertial navigation system[J]. Review of Entific Instruments, 2018, 89 (11): 115102.
doi: 10.1063/1.5046760 |
| 29 |
ARASARATNAM I , HAYKIN S , ELLIOTT R J . Discrete-time nonlinear filtering algorithms using Gauss-Hermite quadrature[J]. Proceedings of the IEEE, 2007, 95 (5): 953- 977.
doi: 10.1109/JPROC.2007.894705 |
| 30 |
GEIGER A , LENZ P , STILLER C , et al. Vision meets robo-tics: the KITTI dataset[J]. The International Journal of Robo-tics Research, 2013, 32 (11): 1231- 1237.
doi: 10.1177/0278364913491297 |
| [1] | Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME [J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902. |
| [2] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [3] | Zhaoqiang SUN, Zhigui WANG, Fei MENG, Luyu LI, Zhong YU, Yan CHEN. Ballistic target tracking filter design based on EKF and ballistic equations [J]. Systems Engineering and Electronics, 2022, 44(10): 3207-3212. |
| [4] | Shuguang SUN, Qixin WEN. Aircraft height optimization algorithm of integrated navigation in terminal area based on height anomaly compensation [J]. Systems Engineering and Electronics, 2021, 43(9): 2612-2619. |
| [5] | Zhe WEN, Hongwei BIAN, Heng MA, Tao ZANG. Simulation test method of inertial navigation polar performance at middle and low latitudes [J]. Systems Engineering and Electronics, 2021, 43(9): 2620-2627. |
| [6] | Renjie ZHAO, Baiqing HU, Xu LYU, Jiayu TIAN. Filtering algorithm of UKF integrated navigation based on dual-Euler angles [J]. Systems Engineering and Electronics, 2021, 43(7): 1912-1920. |
| [7] | Baojie CAI, Lei SHAO. Robust filtering algorithm based on three discriminant domain and least squares fitting [J]. Systems Engineering and Electronics, 2021, 43(5): 1346-1353. |
| [8] | Jing SU, Huafeng HE, Yaomin HE, Yifan WANG, Xiaofei HAN. Filtering algorithm of missile-borne SINS/SAR integrated navigation considering SAR measurement characteristics [J]. Systems Engineering and Electronics, 2021, 43(4): 1044-1049. |
| [9] | Zhizhong LIAO, Qi WANG. Influence and countermeasures of radar seeker pointing error on missile guidance [J]. Systems Engineering and Electronics, 2021, 43(2): 519-525. |
| [10] | Xu LYU, Baiqing HU, Yongbin DAI, Renjie ZHAO. Application of USQUE based on PSO in attitude estimation of integrated navigation [J]. Systems Engineering and Electronics, 2020, 42(6): 1366-1371. |
| [11] | Kaixin LUO, Meiping WU, Ying FAN. Robust adaptive filtering based on maximum entropy method and its application [J]. Systems Engineering and Electronics, 2020, 42(3): 667-673. |
| [12] | Kanghui HE, Chaoyang DONG. Orthogonal transformed fifth-order cubature Kalman filter for navigation [J]. Systems Engineering and Electronics, 2020, 42(3): 680-685. |
| [13] | Xiaolong WANG, Haiying LIU, Jingqi WANG. Collaborative navigation of air-ground multi-agent based on hierarchical SLAM [J]. Systems Engineering and Electronics, 2020, 42(1): 166-171. |
| [14] | ZHANG Chuang, GUO Chen, ZHANG Daheng. Adaptive iterative particle filter and its application for ship integrated navigation [J]. Systems Engineering and Electronics, 2019, 41(4): 883-888. |
| [15] | GE Baoshuang, ZHANG Hai, JIN Yanqiong. Redundant measurement based method for online mitigation of GNSS multipath errors [J]. Systems Engineering and Electronics, 2019, 41(11): 2581-2587. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||