Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (10): 3207-3212.doi: 10.12305/j.issn.1001-506X.2022.10.25
• Guidance, Navigation and Control • Previous Articles Next Articles
Ballistic target tracking filter design based on EKF and ballistic equations
Zhaoqiang SUN*, Zhigui WANG, Fei MENG, Luyu LI, Zhong YU, Yan CHEN
- Beijing Institute of Radio Measurement, Beijing 100854, China
-
Received:2020-07-29Online:2022-09-20Published:2022-10-24 -
Contact:Zhaoqiang SUN
CLC Number:
Cite this article
Zhaoqiang SUN, Zhigui WANG, Fei MENG, Luyu LI, Zhong YU, Yan CHEN. Ballistic target tracking filter design based on EKF and ballistic equations[J]. Systems Engineering and Electronics, 2022, 44(10): 3207-3212.
share this article
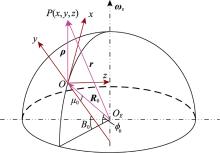
Fig.1
Relation between the trajectory point P and geocentric arrow diameter of the radar"
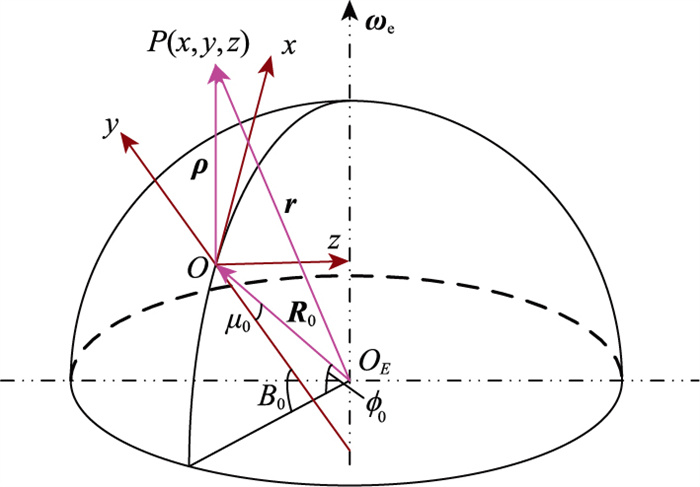
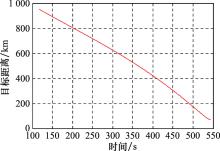
Fig.2
Variation of target range with time"
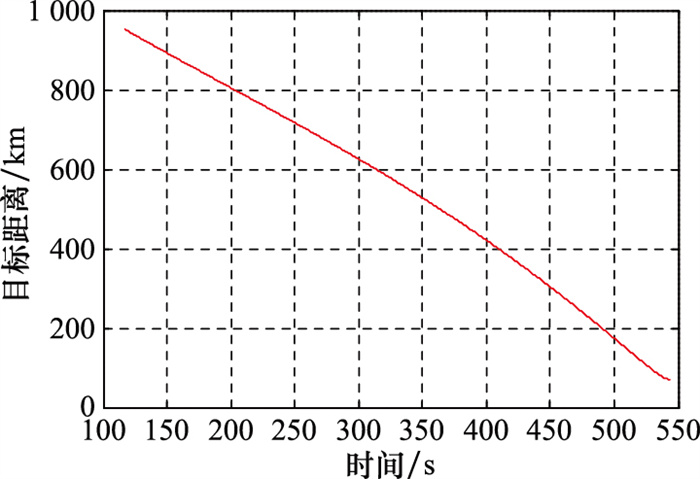
Fig.3
Variation of target azimuth with time"
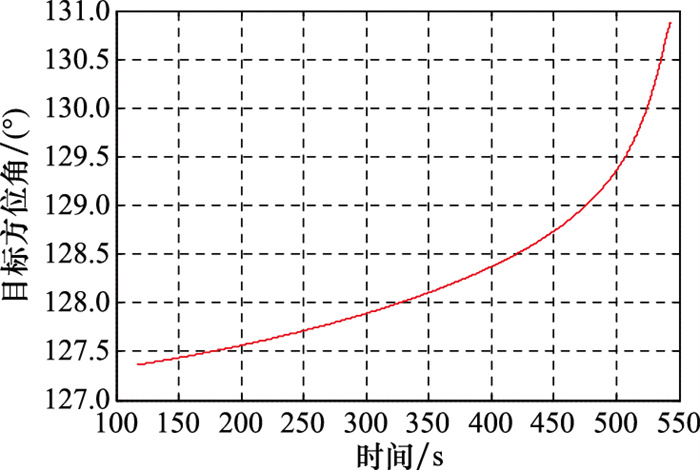

Fig.4
Variation of target pitch angle with time"
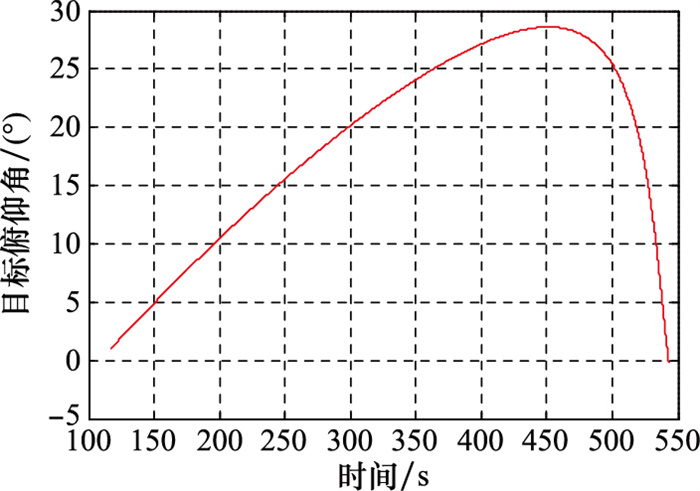
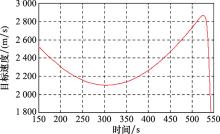
Fig.5
Variation of target velocity with time"
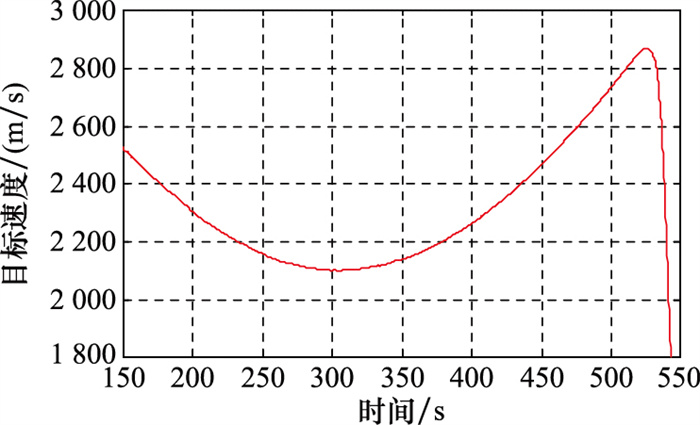
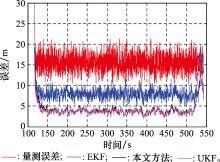
Fig.6
Range root mean square error"
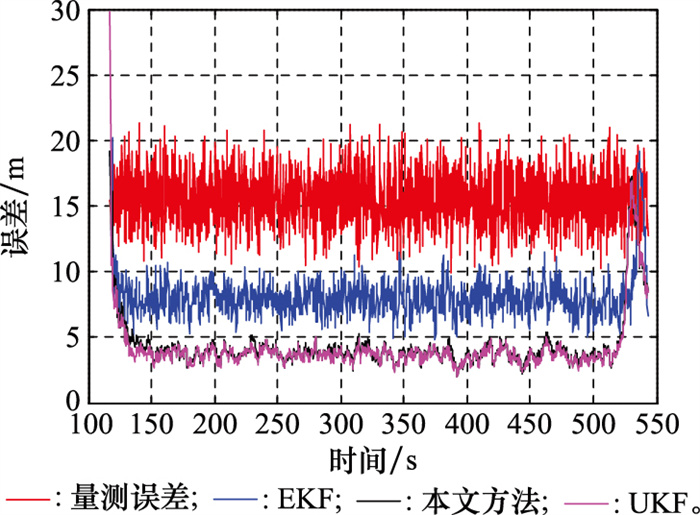

Fig.7
Azimuth root mean square error"
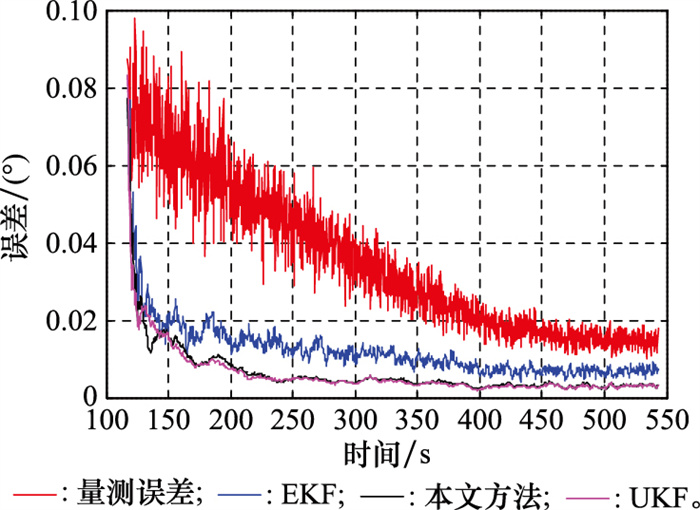
Fig.8
Pitch angle root mean square error"

| 1 | 陈出新. 弹道导弹跟踪方法和算法研究[D]. 西安: 西北工业大学, 2014. |
| CHEN C X. Study on approaches and algorithms for tracking ballistic missile[D]. Xi'an: Northwestern Polytechnical University, 2014. | |
| 2 | 张龙. 弹道导弹高阶容积卡尔曼滤波弹道跟踪方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2017. |
| ZHANG L. Research of ballistic missile trajectory tracking with high-degree cubature Kalman filter[D]. Harbin: Harbin Institute of Technology, 2017. | |
| 3 | YU J F, YANG S C, ZHANG Y W. Flight trajectory correction of target missile and design of tracking guidance[C]//Proc. of the International Conference on Quality, Reliability, Risk, Main-tenance, and Safety Engineering, 2019: 195-202. |
| 4 |
YANG K , YAAKOV B , PETER W , et al. Observability of a thrusting/ballistic trajectory in 3-D from a single fixed passive sensor[J]. IEEE Trans.on Aerospace and Electronic Systems, 2018, 54 (6): 2971- 2979.
doi: 10.1109/TAES.2018.2836539 |
| 5 | LOPATKA J, OKON'-FAFARA M, KAWALEC A, et al. Model of ballistic targets'dynamics used for trajectory tracking algorithms[C]//Proc. of the Conference on Reconnaissance and Electronic Warfare Systems, 2017. |
| 6 |
BARANOWSKI L , GADOMSKI B , MAJEWSKI P , et al. Explicit "ballistic M-model": a refinement of the implicit "modified point mass trajectory model"[J]. Bulletin of the Polish Academy of Sciences Technical Sciences, 2016, 64 (1): 81- 89.
doi: 10.1515/bpasts-2016-0010 |
| 7 | HAN S K , RA W S , WHANG I . Geometric joint probabilistic data association approach to ballistic missile warhead tracking using FMCW radar seeker[J]. IET Radar, Sonar & Navigation, 2017, 10 (8): 1422- 1430. |
| 8 |
PAUL B Q , CHRISTIAN M , FRANCOIS L G . Particle filtering and the laplace method for target tracking[J]. IEEE Trans.on Aerospace and Electronic Systems, 2016, 52 (1): 350- 366.
doi: 10.1109/TAES.2015.140419 |
| 9 |
YU M , CHEN W H , CHAMBERS J . State dependent multiple model-based particle filtering for ballistic missile tracking in a low-observable environment[J]. Aerospace Science and Technology, 2017, 67, 144- 154.
doi: 10.1016/j.ast.2017.03.028 |
| 10 | WANG F, CHU X F, WU N F, et al. An improved trajectory estimation algorithm in boost phase[C]//Proc. of the IEEE 9th Joint International Information Technology and Artificial Intelligence Conference, 2020: 159-163. |
| 11 | NANDA S K, BHATIA V, SINGH A K. Performance analysis of Cubature rule based Kalman filter for target tracking[C]//Proc. of the IEEE 17th India Council International Conference, 2020. |
| 12 | BHAUMIK S, SINGH N K, BHATTACHARYA S. A comparison of several nonlinear filters for ballistic missile tracking on re-entry[C]//Proc. of the IEEE International Conference on Control, Measurement and Instrumentation, 2016. |
| 13 | WANG X G , QIN W T , BAI Y L , et al. Trajectory estimation for ballistic missile in boost stage using robust filtering[J]. IET Radar, Sonar & Navigation, 2017, 11 (3): 513- 519. |
| 14 | LI D H, LI Y, ZHU G F, et al. Comparison of EKF and UKF target tracking algorithms based on observation distance[C]//Proc. of the 7th International Conference on Information Science and Control Engineering, 2020: 402-404. |
| 15 |
GUSTAFSSON F , HENDEBY G . Some relations between extended and unscented Kalman filters[J]. IEEE Trans.on Signal Processing, 2012, 60 (2): 545- 555.
doi: 10.1109/TSP.2011.2172431 |
| 16 |
DENG Z H , SHI L , YIN L J , et al. UKF based on maximum correntropy criterion in the presence of both intermittent observations and non-Gaussian noise[J]. IEEE Sensors Journal, 2020, 20 (14): 7766- 7773.
doi: 10.1109/JSEN.2020.2980354 |
| 17 | LI X T, ZHENG Y, SUN T T. Application of an improved and unscented Kalman filtering algorithm in target tracking[C]//Proc. of the Chinese Control and Decision Conference, 2019. |
| 18 |
ZHOU W D , HOU J X . A new adaptive high-order unscented Kalman filter for improving the accuracy and robustness of target tracking[J]. IEEE Access, 2019, 7, 118484- 118497.
doi: 10.1109/ACCESS.2019.2936879 |
| 19 | GUO Y D, GONG J. Group targets tracking using maximum entropy fuzzy based on fire-fly algorithm and particle filter[C]//Proc. of the 7th International Forum on Electrical Engineering and Automation, 2020: 937-942. |
| 20 | YANG F, HU H W, ZHENG L T, et al. The application of improved particle filtering in ballistic reentry target trajectory tracking[C]//Proc. of the Chinese Automation Congress, 2018: 4089-4094. |
| 21 | ULLAH I , SHEN Y , SU X . A localization based on unscented Kalman filter and particle filter localization algorithms[J]. IEEE Access, 2019, 8, 2233- 2246. |
| 22 | BATTISTINI S, MENEGAZ H M T. Interacting multiple model unscented filter for tracking a ballistic missile during its boost phase[C]//Proc. of the IEEE Aerospace Conference, 2017. |
| 23 | QIN W T , WANG X G , CUI N G . Maximum correntropy sparse Gauss-hermite quadrature filter and its application in tracking ballistic missile[J]. IET Radar, Sonar & Navigation, 2017, 11 (9): 1388- 1396. |
| 24 |
LAWTON J A , JESIONOWSKI R J , ZARCHAN P . Comparison of four filtering options for a radar tracking problem[J]. AIAA Journal of Guidance, Control and Dynamics, 1998, 21 (4): 618- 623.
doi: 10.2514/2.4280 |
| 25 |
FARINA A , RISTIC B , BENVENUTI D . Tracking a ballistic target: comparison of several nonlinear filters[J]. IEEE Trans.on Aerospace and Electronic Systems, 2002, 38 (3): 854- 867.
doi: 10.1109/TAES.2002.1039404 |
| 26 | WANG X G , QIN W T , BAI Y L , et al. Trajector estimation for ballistic missile in boost stage using robust filtering[J]. IET Radar, Sonar & Navigation, 2017, 11 (3): 513- 519. |
| 27 | GONG L Y, YU M. A new interacting multiple model particle filter based ballistic missile tracking method[C]//Proc. of the 3rd International Conference on Frontiers of Signal Processing, 2017: 81-85. |
| 28 |
YU M , GONG L Y , OH H , et al. Multiple model ballistic missile tracking with state-dependent transitions and Gaussian partical filtering[J]. IEEE Trans.on Aerospace and Electronic Systems, 2018, 54 (3): 1066- 1081.
doi: 10.1109/TAES.2017.2773258 |
| 29 | 刘林. 人造地球卫星轨道力学[M]. 北京: 高等教育出版社, 1992. |
| LIU L . Orbiter science of man-made earth satellite[M]. Beijing: Higher Education Press, 1992. | |
| 30 | 刘林. 航天器轨道理论[M]. 北京: 国防工业出版社, 2000. |
| LIU L . Orbit theory of spacecraft[M]. Beijing: National Defence Industy Press, 2000. | |
| 31 |
WRIGHT L A , KINDEL B C , PILEWSKIE P , et al. Kampe and K.S. schmidt. below-cloud atmospheric correction of airborne hyperspectral imagery using simultaneous solar spectral irradiance observations[J]. IEEE Trans.on Geoscience and Remote Sensing, 2021, 59 (2): 1392- 1409.
doi: 10.1109/TGRS.2020.3003209 |
| 32 |
普承恩, 王良明, 傅健. 基于EKF落点预测的二维弹道修正弹制导方法[J]. 兵器装备工程学报, 2018, 39 (6): 52- 57.
doi: 10.11809/bqzbgcxb2018.06.011 |
|
PU C E , WANG L M , FU J . A guidance method for two dimensional trajectory correction projectile based on impact point prediction EKF[J]. Journal of Weapon Equipment Engineering, 2018, 39 (6): 52- 57.
doi: 10.11809/bqzbgcxb2018.06.011 |
| [1] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [2] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [3] | Zhizhong LIAO, Qi WANG. Influence and countermeasures of radar seeker pointing error on missile guidance [J]. Systems Engineering and Electronics, 2021, 43(2): 519-525. |
| [4] | Jiang LI, Cunqian FENG, Yizhe WANG, Sisan HE. Intelligent classification of ballistic targets based on deep learning [J]. Systems Engineering and Electronics, 2020, 42(6): 1226-1234. |
| [5] | Lixun HAN, Bo TIAN, Cunqian FENG. Estimating structural parameters of ballistic targets based on MIMO-ISAR [J]. Systems Engineering and Electronics, 2020, 42(3): 603-612. |
| [6] | Xiaolong WANG, Haiying LIU, Jingqi WANG. Collaborative navigation of air-ground multi-agent based on hierarchical SLAM [J]. Systems Engineering and Electronics, 2020, 42(1): 166-171. |
| [7] | XU Dan, FU Jixiang, SUN Guangcai, XING Mengdao, SU Tao. Accurate wide band high velocity motion compensation for ballistic targets [J]. Systems Engineering and Electronics, 2019, 41(10): 2205-2213. |
| [8] | YUAN Guogang, WANG Yongchuan, CHEN Peng, GAO Xijun. Demodulation of CD3S signals based on DEKF joint estimation [J]. Systems Engineering and Electronics, 2018, 40(9): 2119-2123. |
| [9] | LU Zhiyi, LI Xiangping, CHEN Qi, ZOU Xiaohai. Kalman filtering decoupling algorithm based on particle swarm optimization [J]. Systems Engineering and Electronics, 2018, 40(4): 751-755. |
| [10] | XU Zhaoxin, LI Hangzhou, LI Liang, ZHAO Lin, LIU Ya. EKF/SF-based short-baseline BDS multipath mitigation method [J]. Systems Engineering and Electronics, 2017, 39(6): 1334-1340. |
| [11] | WEI Heng, L Qiang, LIN Huican, ZHANG Yang, LIANG Jian. Survey on multi-robot SLAM back-end optimization algorithm [J]. Systems Engineering and Electronics, 2017, 39(11): 2553-2565. |
| [12] | HU Xiao-wei, TONG Ning-ning, HU Guo-ping, WANG Yu-chen. Multi-ballistic targets resolution based on micro-Doppler [J]. Systems Engineering and Electronics, 2015, 37(8): 1734-1740. |
| [13] | HUANG Jing, NING Chao, ZHU Yong. Estimation method for ballistic target range profile length based on the optimal route algorithm [J]. Systems Engineering and Electronics, 2015, 37(7): 1499-1503. |
| [14] | ZHONG Yu, WU Xiao-yan, HUANG Shu-cai, LI Cheng-jing, WU Jian-feng. Doppler shift based anti-ballistic missile operation of infrared early warning satellites [J]. Systems Engineering and Electronics, 2015, 37(12): 2689-2695. |
| [15] | LI Guo-hui,LI Ya-an,YANG Hong. Filtering method of new chaotic system based on EKF [J]. Systems Engineering and Electronics, 2013, 35(9): 1830-1835. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||