Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (4): 1044-1049.doi: 10.12305/j.issn.1001-506X.2021.04.22
• Guidance, Navigation and Control • Previous Articles Next Articles
Filtering algorithm of missile-borne SINS/SAR integrated navigation considering SAR measurement characteristics
Jing SU*( ), Huafeng HE(), Yaomin HE(), Yifan WANG(), Xiaofei HAN()
), Huafeng HE(), Yaomin HE(), Yifan WANG(), Xiaofei HAN()
- School of Missile Engineering, Rocket Force University of Engineering, Xi'an 710025, China
-
Received:2020-06-08Online:2021-03-25Published:2021-03-31 -
Contact:Jing SU E-mail:937394668@qq.com;1070748152@qq.com;1071936827@qq.com;1114265837@qq.com;974156612@qq.com
CLC Number:
Cite this article
Jing SU, Huafeng HE, Yaomin HE, Yifan WANG, Xiaofei HAN. Filtering algorithm of missile-borne SINS/SAR integrated navigation considering SAR measurement characteristics[J]. Systems Engineering and Electronics, 2021, 43(4): 1044-1049.
share this article
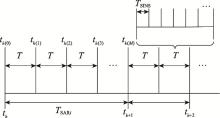
Fig.1
Temporal relation of non-equal interval measurement"
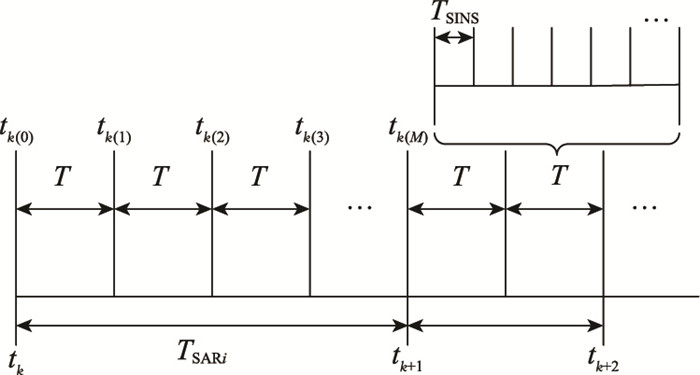

Fig.2
Time sequence diagram of SAR image matching measurement lag"
Table 1
Inertial device error"
| 误差项 | 误差值(1σ) | 相关时间 |
| 陀螺仪常值漂移 | 0.1/(°/h) | 1/h |
| 陀螺仪量测白噪声 | 0.05/(°/h) | 0 |
| 加速度计常值偏置 | 10-4g | 0.5/h |
| 加速度计量测白噪声 | 5×10-5g | 0 |
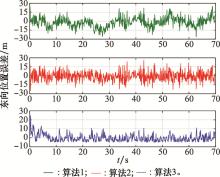
Fig.3
Eastward position error of missile-borne SINS/SAR integrated navigation system"


Fig.4
Heading angle error of missile-borne SINS/SAR integrated navigation system"
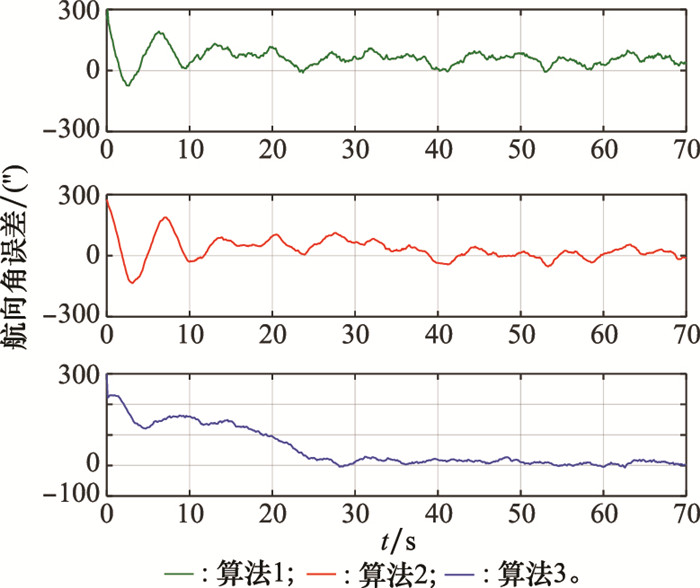
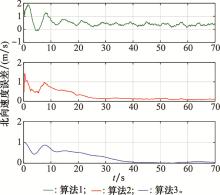
Fig.5
North ward velocity error of missile-borne SINS/SAR integrated navigation system"

Table 2
Filtering accuracy of missile-borne SINS/SAR integrated navigation system"
| 滤波算法 | 东向位置/m | 航向角/(″) | 北向速度/(m/s) |
| 算法1 | 13.56 | 38.56 | 0.59 |
| 算法2 | 8.49 | 10.52 | 0.21 |
| 算法3 | 5.12 | 6.63 | 0.08 |
Table 3
Simulation results of east position error"
| 次数 | 1 | 2 | 3 | 4 | 5 |
| 算法1 | 14.21 | 11.38 | 12.29 | 10.37 | 16.59 |
| 次数 | 6 | 7 | 8 | 9 | 10 |
| 算法1 | 13.61 | 11.89 | 18.60 | 13.38 | 11.12 |
| 1 | NOURMOHAMMADI H , KEIGHOBADI J . Fuzzy adaptive integration scheme for low-cost SINS/GPS navigation system[J]. Mechanical Systems and Signal Processing, 2018, 99 (1): 434- 449. |
| 2 | ERDYNEEV Z T , BABUR G , GELTSER A A . Range observation method applied to linear frequency-modulated continuous-wave synthetic-aperture radars[J]. Journal of Communications Technology & Electronics, 2018, 63 (3): 220- 225. |
| 3 | LIU Y H , FAN X Q , LYU C , et al. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles[J]. Mechanical Systems and Signal Processing, 2018, 100 (2): 605- 616. |
| 4 |
CHEN J , SHU B Z . A novel adaptively-robust strategy based on the mahalanobis distance for GPS/INS integrated navigation systems[J]. Sensors, 2018, 18 (3): 695- 699.
doi: 10.3390/s18030695 |
| 5 |
YAO L , ZHANG H , HUANG X P . Analysis on error compensation for integrated navigation based on forgotten Kalman filter[J]. Journal of Physics Conference, 2019, 1187 (5): 052008.
doi: 10.1088/1742-6596/1187/5/052008 |
| 6 |
ZHAO L , QIU H Y , FENG Y M . Analysis of a robust Kalman filter in loosely coupled GPS/INS navigation system[J]. Measurement, 2016, 80, 138- 147.
doi: 10.1016/j.measurement.2015.11.008 |
| 7 | DAI Q , SUI L F , WANG L X , et al. An efficiency algorithm on Gaussian mixture UKF for BDS/INS navigation system[J]. Geodesy and Geodynamics, 2018, 9 (2): 65- 70. |
| 8 | 茹江涛, 冷雪飞, 巩哲. INS/SAR组合导航量测信息不同步的滤波算法[J]. 南京航空航天大学学报, 2017, 49 (2): 276- 282. |
| RU J T , LENG X F , GONG Z . Filtering algorithm for INS/SAR integrated navigation measurement information asynchronism[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2017, 49 (2): 276- 282. | |
| 9 | 高社生, 谢梅林, 赵飞. 一种新的SAR时延补偿算法及其在组合导航中的应用[J]. 中国惯性技术学报, 2013, 21 (3): 107- 111, 122. |
| GAO S S , XIE M L , ZHAO F . A new SAR delay compensation algorithm and its application in integrated navigation[J]. Chinese Journal of Inertial Technology, 2013, 21 (3): 107- 111, 122. | |
| 10 | 朱倚娴, 程向红, 周玲, 等. 组合导航系统中异步多传感器信息融合算法[J]. 东南大学学报(自然科学版), 2018, 48 (2): 195- 200. |
| ZHU Y X , CHENG X H , ZHOU L , et al. Asynchronous multisensor information fusion algorithm in integrated navigation system[J]. Journal of Southeast University (Natural Science Edition), 2018, 48 (2): 195- 200. | |
| 11 | CUI M M , LIU S W , GAO S S , et al. Study on measuring delay compensation method for SINS/SAR integrated navigation system[J]. Measurement and Control Technology, 2014, 33 (6): 20- 23, 25. |
| 12 | YAN H F, ZHAO X H, GAO S S, et al. Adaptive robust unscented particle filter and its application in SINS/SAR integration navigation system[C]//Proc. of the IEEE Advanced Information Technology, Electronic & Automation Control Conference, 2017. |
| 13 | LI M, YI W, YANG Q, et al. An efficient particle filter for the oosm problem in nonlinear dynamic systems[C]//Proc. of the 21st International Conference on Information Fusion, 2018: 1890-1895. |
| 14 | CHEN J G , LI J , GAO X B . Single-step-lag OOSM algorithm based on unscented transformation[J]. Science China, 2011, 54 (3): 664- 673. |
| 15 |
吕太之, 周武, 赵春霞. 一种改进的UKF-SLAM算法[J]. 中北大学学报(自然科学版), 2018, 39 (6): 717- 725, 751.
doi: 10.3969/j.issn.1673-3193.2018.06.014 |
|
LYV T Z , ZHOU W , ZHAO C X . An improved UKF-SLAM algorithm[J]. Journal of North University of China (Natural Science Edition), 2018, 39 (6): 717- 725, 751.
doi: 10.3969/j.issn.1673-3193.2018.06.014 |
|
| 16 | CHEN F , XU Y X . High-speed and robust scene matching algorithm based on ORB for SAR/INS integrated navigation system[J]. Applied Mechanics and Materials, 2013, 241-244, 439- 443. |
| 17 | 陈韦名. 曲线拟合原理及其应用研究[D]. 长沙: 长沙理工大学, 2019. |
| CHEN W M. Principle and application of curve fitting[D]. Changsha: Changsha University of Science and Technology, 2019. | |
| 18 | XIAN Y , LI G . Research on SINS error recursive model of ballistic missile[J]. Journal of China Ordnance, 2010, 6 (1): 71- 74. |
| 19 |
MARIANI S , GHISI A . Unscented Kalman filtering for nonlinear structural dynamics[J]. Nonlinear Dynamics, 2007, 49 (1): 131- 150.
doi: 10.1007/s11071-006-9118-9 |
| 20 | SHAO C W , YANG L , WEI R . Unscented-transformation-based distributed nonlinear state estimation: algorithm, analysis, and experiments[J]. IEEE Trans.on Control Systems Technology, 2018, 27 (5): 2016- 2029. |
| 21 |
KANG X N , XIE C P , WANG M Q . A Cholesky-based estimation for large-dimensional covariance matrices[J]. Journal of Applied Statistics, 2020, 47 (6): 1017- 1030.
doi: 10.1080/02664763.2019.1664424 |
| 22 | QI T , LAMEI H E . Unscented Kalman filtering method with nonlinear equality constraint[J]. Journal of Computer Applications, 2018, 38 (5): 1481- 1487. |
| 23 | GAO B B , HU G , GAO S S , et al. Multi-sensor optimal data fusion for INS/GNSS/CNS integration based on unscented Kalman filter[J]. International Journal of Control, Automation and Systems, 2018, 16 (3): 129- 140. |
| 24 | YANG B , WANG Y G , XU H T . Compensation method for satellite navigation information delay in high-speed flight environment[J]. Journal of Chinese Inertial Technology, 2011, 19 (3): 293- 297. |
| [1] | Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME [J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902. |
| [2] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [3] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [4] | Shuguang SUN, Qixin WEN. Aircraft height optimization algorithm of integrated navigation in terminal area based on height anomaly compensation [J]. Systems Engineering and Electronics, 2021, 43(9): 2612-2619. |
| [5] | Zhe WEN, Hongwei BIAN, Heng MA, Tao ZANG. Simulation test method of inertial navigation polar performance at middle and low latitudes [J]. Systems Engineering and Electronics, 2021, 43(9): 2620-2627. |
| [6] | Renjie ZHAO, Baiqing HU, Xu LYU, Jiayu TIAN. Filtering algorithm of UKF integrated navigation based on dual-Euler angles [J]. Systems Engineering and Electronics, 2021, 43(7): 1912-1920. |
| [7] | Baojie CAI, Lei SHAO. Robust filtering algorithm based on three discriminant domain and least squares fitting [J]. Systems Engineering and Electronics, 2021, 43(5): 1346-1353. |
| [8] | Xu LYU, Baiqing HU, Yongbin DAI, Renjie ZHAO. Application of USQUE based on PSO in attitude estimation of integrated navigation [J]. Systems Engineering and Electronics, 2020, 42(6): 1366-1371. |
| [9] | Kaixin LUO, Meiping WU, Ying FAN. Robust adaptive filtering based on maximum entropy method and its application [J]. Systems Engineering and Electronics, 2020, 42(3): 667-673. |
| [10] | Kanghui HE, Chaoyang DONG. Orthogonal transformed fifth-order cubature Kalman filter for navigation [J]. Systems Engineering and Electronics, 2020, 42(3): 680-685. |
| [11] | ZHANG Chuang, GUO Chen, ZHANG Daheng. Adaptive iterative particle filter and its application for ship integrated navigation [J]. Systems Engineering and Electronics, 2019, 41(4): 883-888. |
| [12] | GE Baoshuang, ZHANG Hai, JIN Yanqiong. Redundant measurement based method for online mitigation of GNSS multipath errors [J]. Systems Engineering and Electronics, 2019, 41(11): 2581-2587. |
| [13] | CHENG Jianhua, FAN Shilong, LI Liang, DONG Ping. Time synchronization technology of integrated navigation based on measurement correction [J]. Systems Engineering and Electronics, 2019, 41(10): 2328-2333. |
| [14] | LIU Guangming, XU Fanjiang. Application of robustly adaptive UKF algorithm in ground-based bearings-only tracking for space targets [J]. Systems Engineering and Electronics, 2018, 40(3): 623-629. |
| [15] | GAO Junqiang, TANG Xiaqing, ZHANG Huan, WU Meng. Vehicle INS/GNSS/OD integrated navigation algorithm based on factor graph [J]. Systems Engineering and Electronics, 2018, 40(11): 2547-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||