Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (7): 1912-1920.doi: 10.12305/j.issn.1001-506X.2021.07.23
• Guidance, Navigation and Control • Previous Articles Next Articles
Filtering algorithm of UKF integrated navigation based on dual-Euler angles
Renjie ZHAO*, Baiqing HU, Xu LYU, Jiayu TIAN
- College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China
-
Received:2020-04-30Online:2021-06-30Published:2021-07-08 -
Contact:Renjie ZHAO
CLC Number:
Cite this article
Renjie ZHAO, Baiqing HU, Xu LYU, Jiayu TIAN. Filtering algorithm of UKF integrated navigation based on dual-Euler angles[J]. Systems Engineering and Electronics, 2021, 43(7): 1912-1920.
share this article

Fig.1
Switching diagram"

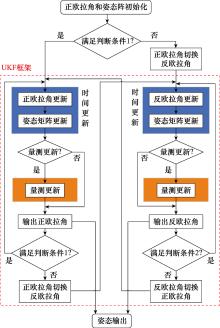
Fig.2
Flow chart of attitude estimation of DEUKF algorithm"
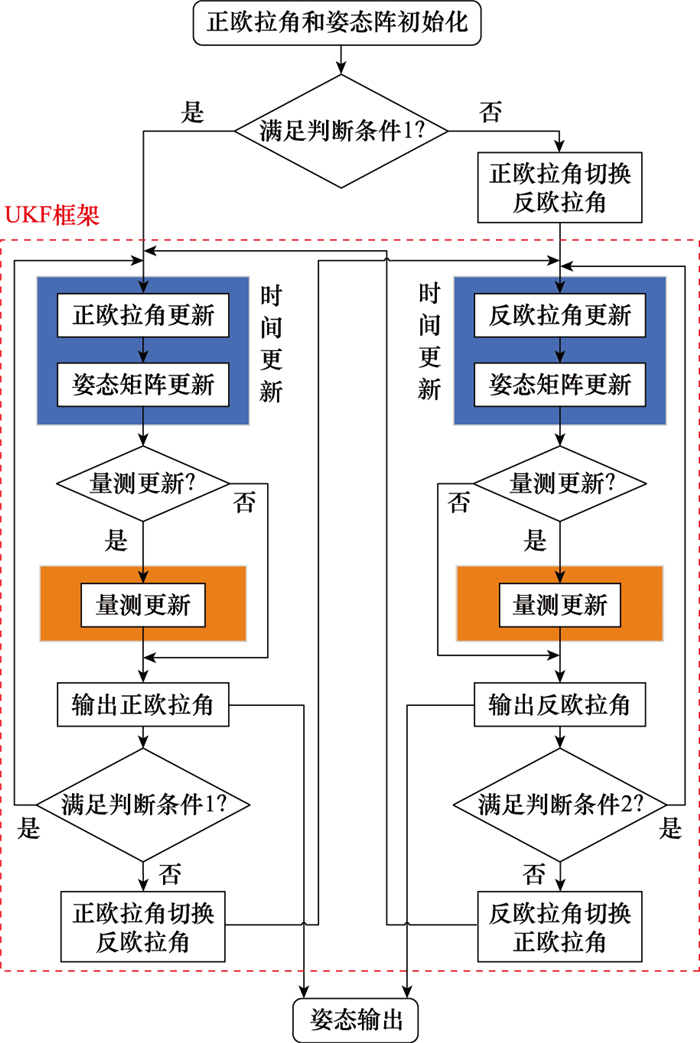

Fig.3
Structure diagram of SINS/GPS direct integrated navigation system"
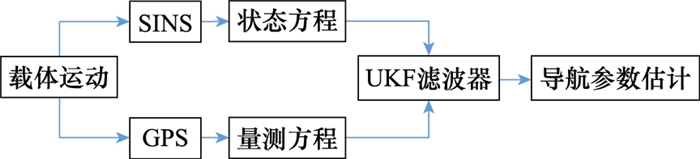
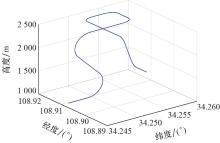
Fig.4
Simulation of motion trajectory"
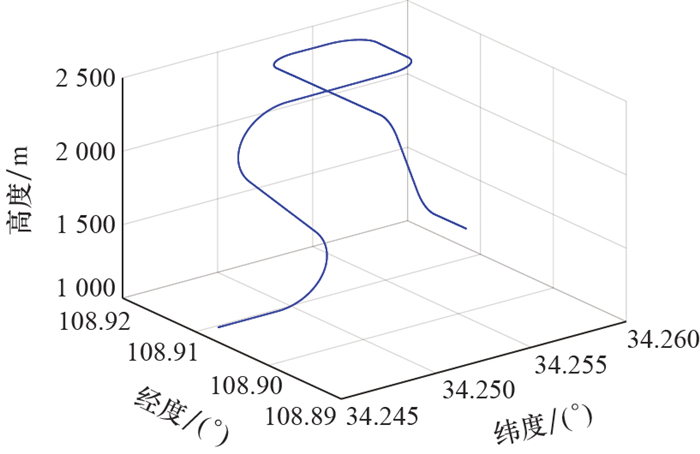
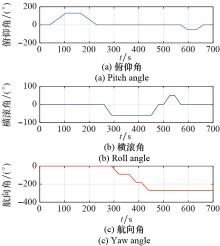
Fig.5
Change of carrier attitude"

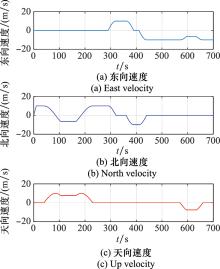
Fig.6
Change of carrier velocity"


Fig.7
Comparison of pitch angle and roll angle estimation errors"


Fig.8
Comparison of yaw angle estimation error"
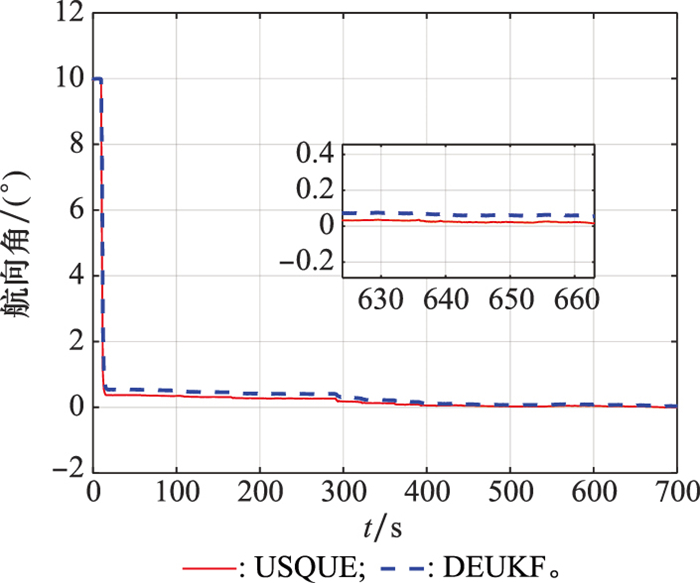
Table 1
Attitude RMSE and algorithm running time"
| 算法 | 均方根误差/(′) | 时间/s | ||
| 俯仰角 | 横滚角 | 航向角 | ||
| USQUE | 0.629 | 0.672 | 1.72 | 394 |
| DEUKF | 0.651 | 0.728 | 5.83 | 160 |
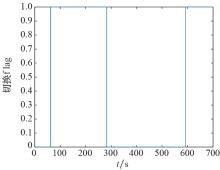
Fig.9
Switching diagram of positive and reverse Euler angles"
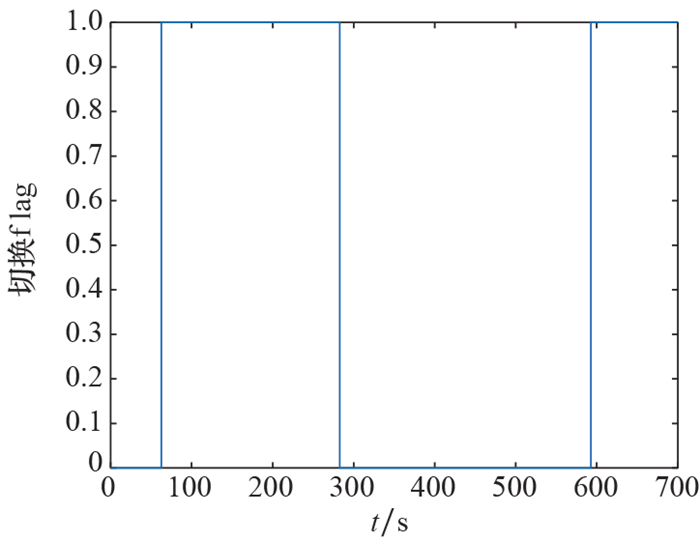

Fig.10
Changing diagram of attitude mean square error"
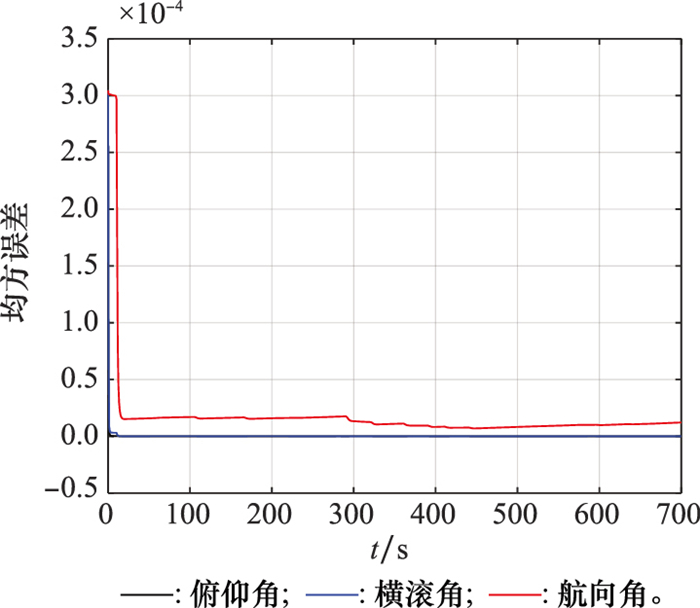
Table 2
Main performance index of the XW-IMU5220"
| 性能指标 | 陀螺仪 | 加速度计 |
| 动态范围 | ±150°/s | ±10 g |
| 零偏稳定性 | ≤0.02°/s | ≤0.001 g |
| 零偏重复性 | ≤0.02°/s | ≤0.001 g |
| 更新频率 | 100 Hz | 100 Hz |

Fig.11
Experiment motion trajectory"
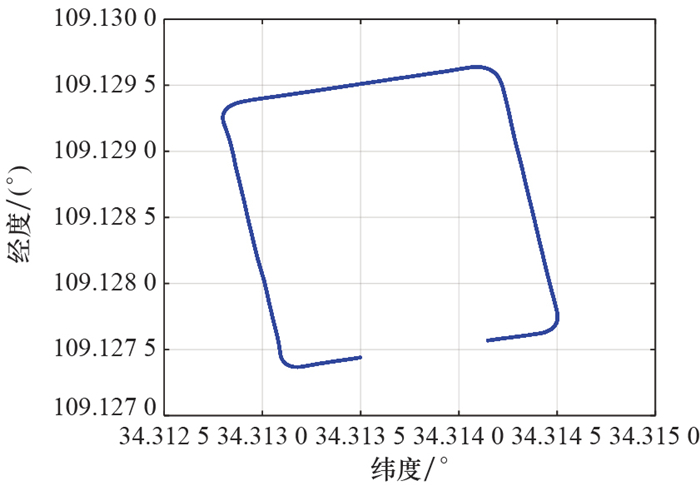
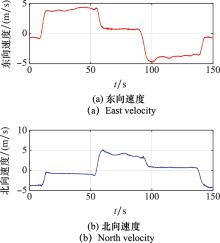
Fig.12
Velocity of the vehicle motion"

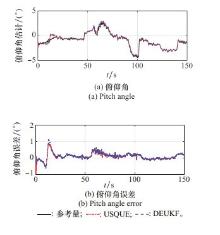
Fig.13
Pitch angle and estimation error"
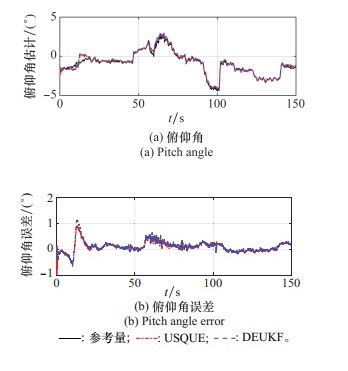
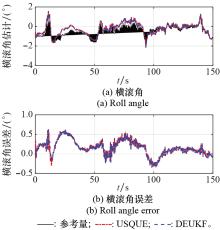
Fig.14
Roll angle and estimation error"

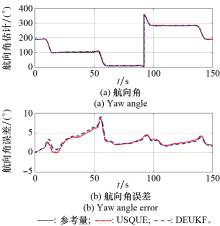
Fig.15
Yaw angle and estimation error"
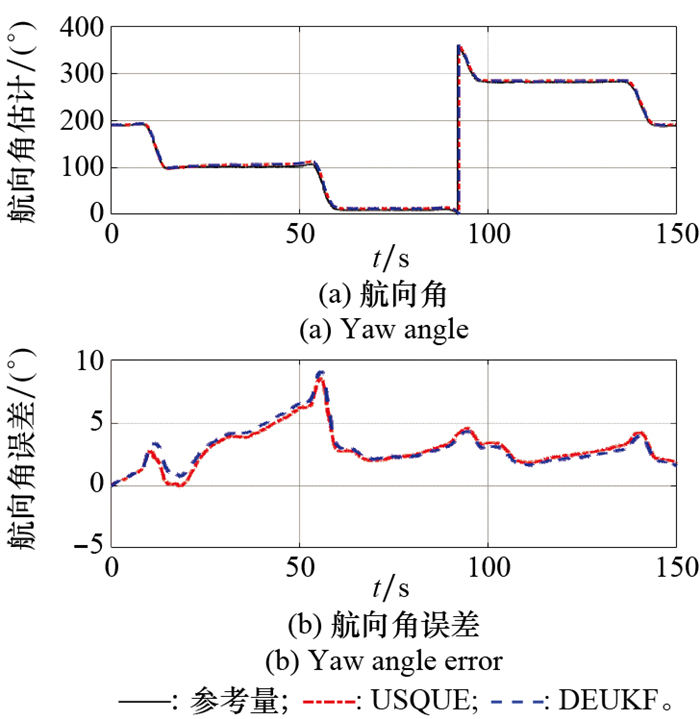
Table 3
Attitude RMSE and algorithm running time"
| 算法 | 均方根误差/(°) | 时间/s | ||
| 俯仰角 | 横滚角 | 航向角 | ||
| USQUE | 0.241 | 0.245 | 3.334 | 97 |
| DEUKF | 0.221 | 0.250 | 3.426 | 56 |
| 1 | 严恭敏. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019. |
| YAN G M . Strapdown inertial navigation system algorithm and integrated navigation principle[M]. Xi'an: Northwestern Polytechnical University Press, 2019. | |
| 2 |
ALI J , MIRZA M R . Performance comparison among some nonlinear filters for a low cost SINS/GPS integrated solution[J]. Nonlinear Dynamics, 2010, 61 (3): 491- 502.
doi: 10.1007/s11071-010-9665-y |
| 3 |
ZHANG T , XU X S . A new method of seamless land navigation for GPS/INS integrated system[J]. Measurement, 2012, 45 (4): 691- 701.
doi: 10.1016/j.measurement.2011.12.021 |
| 4 | MA H B , YAN L P , XIA Y Q , et al. Kalman filtering and information fusion[M]. Beijing: Science Press, 2020. |
| 5 |
杨波, 秦永元, 柴艳. UKF在INS/GPS直接法卡尔曼滤波中的应用[J]. 传感技术学报, 2007, (4): 842- 846.
doi: 10.3969/j.issn.1004-1699.2007.04.030 |
|
YANG B , QIN Y Y , CHAI Y . Application of UKF in direct method of Kalman filter for INS/GPS[J]. Chinese Journal of Sensors and Actuators, 2007, (4): 842- 846.
doi: 10.3969/j.issn.1004-1699.2007.04.030 |
|
| 6 | LI K L , HU B Q , GAO J D , et al. Direct navigation mode and indirect navigation mode for integrated SINS/GPS[J]. Applied Mechanics and Materials, 2014, 568 (2): 958- 963. |
| 7 |
ZHOU J , KNEDLIK S , LOFFELD O . INS/GPS tightly-coupled integration using adaptive unscented particle filter[J]. Journal of Navigation, 2010, 63 (3): 491- 511.
doi: 10.1017/S0373463310000068 |
| 8 | CHANG L B , HU B Q , LI A , et al. Strapdown inertial navigation system alignment based on marginalised unscented Kalman filter[J]. Iet Science Measurement & Technology, 2013, 7 (2): 128- 138. |
| 9 | ZHOU W D, QIAO X W, MENG F B, et al. Study on SINS/GPS tightly integrated navigation based on adaptive extended Kalman filter[C]//Proc. of the International Conference on Information and Automation, 2010: 2344-2347. |
| 10 | CASEY R T, KARPENKO M, CURRY R, et al. Attitude representation and kinematic propagation for low-cost UAVs[C]//Proc. of the Aiaa Guidance, Navigation, & Control, 2013. |
| 11 | JUNKINS J L . How to avoid singularity when using Euler angles?[J]. Advances in the Astronautical Sciences, 2005, 119, 1409- 1426. |
| 12 | 乔相伟, 周卫东, 吉宇人. 用四元数状态切换无迹卡尔曼滤波器估计的飞行器姿态[J]. 控制理论与应用, 2012, 29 (1): 97- 103. |
| QIAO X W , ZHOU W D , JI Y R . Aircraft attitude estimation based on quaternion state-switching unscented Kalman filter[J]. Control Theory & Applications, 2012, 29 (1): 97- 103. | |
| 13 |
CRASSIDIS J L , MARKLEY F L . Unscented filtering for spacecraft attitude estimation[J]. Journal of Guidance Control and Dynamics, 2003, 26 (4): 536- 542.
doi: 10.2514/2.5102 |
| 14 |
CRASSIDIS J L . Sigma-point Kalman filtering for integrated GPS and inertial navigation[J]. IEEE Trans.on Aerospace and Electronic Systems, 2006, 42 (2): 750- 756.
doi: 10.1109/TAES.2006.1642588 |
| 15 | 李开龙, 胡柏青, 常路宾. 改进四元数无味卡尔曼滤波算法[J]. 系统工程与电子技术, 2016, 38 (6): 1399- 1404. |
| LI K L , HU B Q , CHANG L B . Modified quaternion unscented Kalman filter[J]. Systems Engineering and Electronics, 2016, 38 (6): 1399- 1404. | |
| 16 |
KARLGAARD C D , SCHAUB H . Nonsingular attitude filtering using modified rodrigues parameters[J]. Journal of The Astronautical Sciences, 2009, 57 (4): 777- 791.
doi: 10.1007/BF03321529 |
| 17 |
LI K L , CHANG L B , HU B Q . Unscented attitude estimator based on dual attitude representations[J]. IEEE Trans.on Instrumentation and Measurement, 2015, 64 (12): 3564- 3576.
doi: 10.1109/TIM.2015.2454631 |
| 18 | 陈永冰, 李文魁, 周岗, 等. 基于双姿态的高阶罗德里格斯参数姿态估计[J]. 华中科技大学学报(自然科学版), 2017, 45 (1): 82- 86. |
| CHEN Y B , LI W K , ZHOU G , et al. Dual attitude representations based attitude estimation using high order Rodrigues parameter[J]. Huazhong University of Science & Technology. (Natural Science Edition), 2017, 45 (1): 82- 86. | |
| 19 | 黄雪樵. 克服欧拉方程奇异性的双欧法[J]. 飞行力学, 1994, (4): 28- 37. |
| HUANG X Q . The dual-Euler method for overcoming the singularity of Euler equation[J]. Flight Dynamics, 1994, (4): 28- 37. | |
| 20 | 陈廷楠, 张登成. 双欧法与四元数法的应用比较[J]. 飞行力学, 1996, (4): 59- 64. |
| CHEN T N , ZHAN D C . Application comparision of dual Euler method and quaternion method[J]. Flight Dynamics, 1996, (4): 59- 64. | |
| 21 |
SHIN S , LEE J , YOON S . A comparison study of real-time solution to all-attitude angles of an aircraft[J]. Journal of Mechanical Science and Technology, 2006, 20 (3): 376- 381.
doi: 10.1007/BF02917520 |
| 22 |
李跃军, 阎超. 飞行器姿态角解算的全角度双欧法[J]. 北京航空航天大学学报, 2007, 33 (5): 505- 508.
doi: 10.3969/j.issn.1001-5965.2007.05.001 |
|
LI Y J , YAN C . Improvement of dual-Euler method for full scale Eulerian angles solution of aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33 (5): 505- 508.
doi: 10.3969/j.issn.1001-5965.2007.05.001 |
|
| 23 |
RAN C Y , CHENG X H . A direct and non-singular UKF approach using Euler angle kinematics for integrated navigation systems[J]. Sensors, 2016, 16 (9): 1415.
doi: 10.3390/s16091415 |
| 24 | 吕维维, 程向红, 邱伟. 基于弹载捷联惯性导航系统精确导航的双欧拉全姿态方法[J]. 上海航天, 2019, 36 (1): 34- 42. |
| LYU W W , CHENG X H , QIU W . Dual-Euler whole attitude solving method based on accurate navigation of missile-borne strapdown inertial navigation system[J]. Aerospace Shanghai, 2019, 36 (1): 34- 42. | |
| 25 | YOON S. A study on optimal switching angles in dual-Euler method[C]//Proc. of the Aiaa Modeling & Simulation Technologies Conference & Exhibit, 2002. |
| 26 | 吕旭, 胡柏青, 戴永彬, 等. 基于PSO的USQUE在组合导航姿态估计中的应用[J]. 系统工程与电子技术, 2020, 42 (6): 1366- 1371. |
| LYU X , HU B Q , DAI Y B , et al. Application of USQUE based on PSO in attitude estimation of integrated navigation[J]. Systems Engineering and Electronics, 2020, 42 (6): 1366- 1371. | |
| 27 | CHANG L B , HU B Q , CHANG G B . Modified unscented quaternion estimator based on quaternion averaging[J]. Journal of Guidance, Control, and Dynamics, 2013, 37 (1): 305- 309. |
| [1] | Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME [J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902. |
| [2] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [3] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [4] | Shuguang SUN, Qixin WEN. Aircraft height optimization algorithm of integrated navigation in terminal area based on height anomaly compensation [J]. Systems Engineering and Electronics, 2021, 43(9): 2612-2619. |
| [5] | Zhe WEN, Hongwei BIAN, Heng MA, Tao ZANG. Simulation test method of inertial navigation polar performance at middle and low latitudes [J]. Systems Engineering and Electronics, 2021, 43(9): 2620-2627. |
| [6] | Baojie CAI, Lei SHAO. Robust filtering algorithm based on three discriminant domain and least squares fitting [J]. Systems Engineering and Electronics, 2021, 43(5): 1346-1353. |
| [7] | Jing SU, Huafeng HE, Yaomin HE, Yifan WANG, Xiaofei HAN. Filtering algorithm of missile-borne SINS/SAR integrated navigation considering SAR measurement characteristics [J]. Systems Engineering and Electronics, 2021, 43(4): 1044-1049. |
| [8] | Renjie ZHAO, Kailong LI, Baiqing HU, Jiayu TIAN. SINS initial alignment algorithm based on improved quaternion damping error model [J]. Systems Engineering and Electronics, 2021, 43(11): 3330-3337. |
| [9] | Xu LYU, Baiqing HU, Yongbin DAI, Renjie ZHAO. Application of USQUE based on PSO in attitude estimation of integrated navigation [J]. Systems Engineering and Electronics, 2020, 42(6): 1366-1371. |
| [10] | Kaixin LUO, Meiping WU, Ying FAN. Robust adaptive filtering based on maximum entropy method and its application [J]. Systems Engineering and Electronics, 2020, 42(3): 667-673. |
| [11] | Kanghui HE, Chaoyang DONG. Orthogonal transformed fifth-order cubature Kalman filter for navigation [J]. Systems Engineering and Electronics, 2020, 42(3): 680-685. |
| [12] | ZHANG Chuang, GUO Chen, ZHANG Daheng. Adaptive iterative particle filter and its application for ship integrated navigation [J]. Systems Engineering and Electronics, 2019, 41(4): 883-888. |
| [13] | GE Baoshuang, ZHANG Hai, JIN Yanqiong. Redundant measurement based method for online mitigation of GNSS multipath errors [J]. Systems Engineering and Electronics, 2019, 41(11): 2581-2587. |
| [14] | CHENG Jianhua, FAN Shilong, LI Liang, DONG Ping. Time synchronization technology of integrated navigation based on measurement correction [J]. Systems Engineering and Electronics, 2019, 41(10): 2328-2333. |
| [15] | CHEN He, ZHANG Zhili, ZHOU Zhaofa, LIU Pengpeng, ZHAO Junyang. Equivalence analysis between two quaternion based coarse alignment algorithms for SINS with inertial frame [J]. Systems Engineering and Electronics, 2018, 40(5): 1098-1103. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||