Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (6): 1984-1993.doi: 10.12305/j.issn.1001-506X.2022.06.26
• Guidance, Navigation and Control • Previous Articles Next Articles
UCAV escape maneuvering decision based on fuzzy expert system and IDE algorithm
Mulai TAN*, Dali DING, Lei XIE, Wei DING, Chenghui LYU
- Aeronautics Engineering College, Air Force Engineering University, Xi'an 710038, China
-
Received:2021-05-08Online:2022-05-30Published:2022-05-30 -
Contact:Mulai TAN
CLC Number:
Cite this article
Mulai TAN, Dali DING, Lei XIE, Wei DING, Chenghui LYU. UCAV escape maneuvering decision based on fuzzy expert system and IDE algorithm[J]. Systems Engineering and Electronics, 2022, 44(6): 1984-1993.
share this article

Fig.1
Principle of RHC"
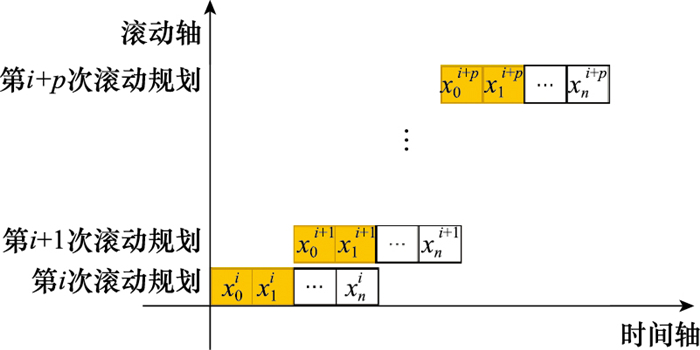
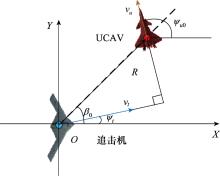
Fig.2
Schematic diagram of optimal track deflection angle in horizontal plane when qt>30°"
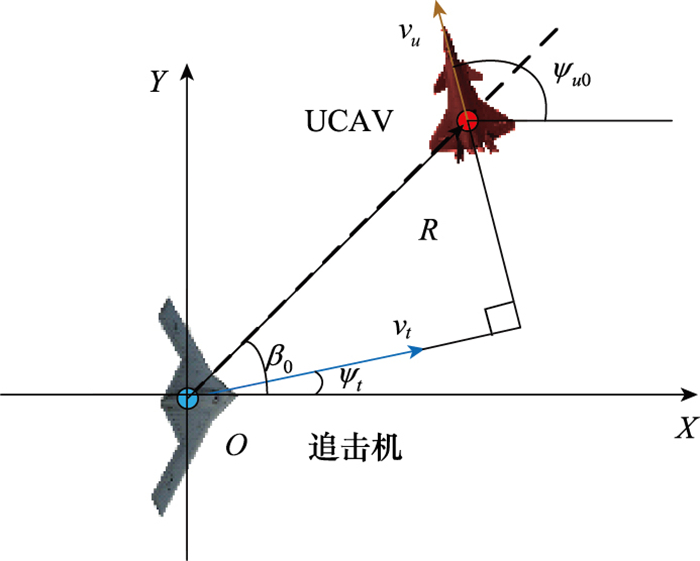
Fig.3
Extended library of maneuvers"
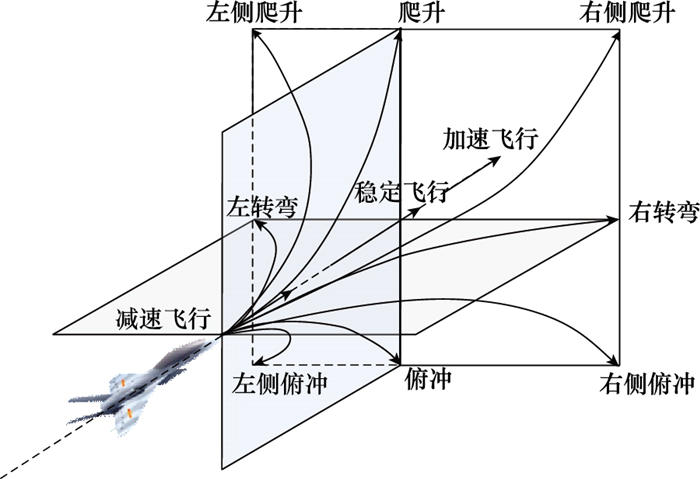

Fig.4
Expert system structure diagram based on fuzzy reasoning"
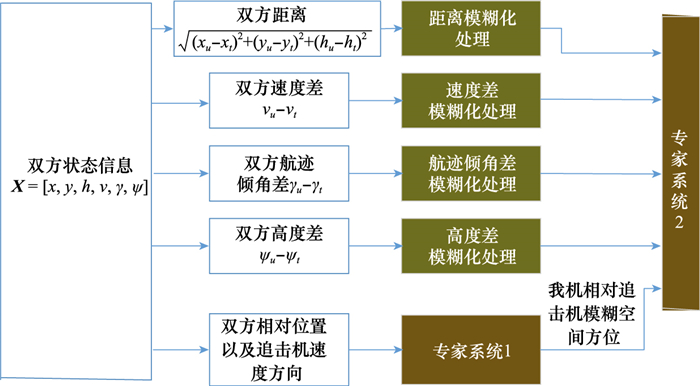
Table 1
Expert system 1 design"
| 序号 | 高度差 | 视线角-ψt | 模糊输出 |
| 1 | |hu-ht|≤50 | 视线角-ψt≥15π/180 | 左前方 |
| 2 | |hu-ht|≤50 | |视线角-ψt|≤15π/180 | 正前方 |
| 3 | |hu-ht|≤50 | 视线角-ψt < -15π/180 | 右前方 |
| 4 | hu-ht > 50 | 视线角-ψt≥15π/180 | 左上方 |
| 5 | hu-ht > 50 | |视线角-ψt|≤15π/180 | 正上方 |
| 6 | hu-ht > 50 | 视线角-ψt < -15π/180 | 右上方 |
| 7 | hu-ht < -50 | 视线角-ψt≥15π/180 | 左下方 |
| 8 | hu-ht < -50 | |视线角-ψt|≤15π/180 | 正下方 |
| 9 | hu-ht < -50 | 视线角-ψt < -15π/180 | 右下方 |
Fig.5
Typical tactical diagram of air combat"
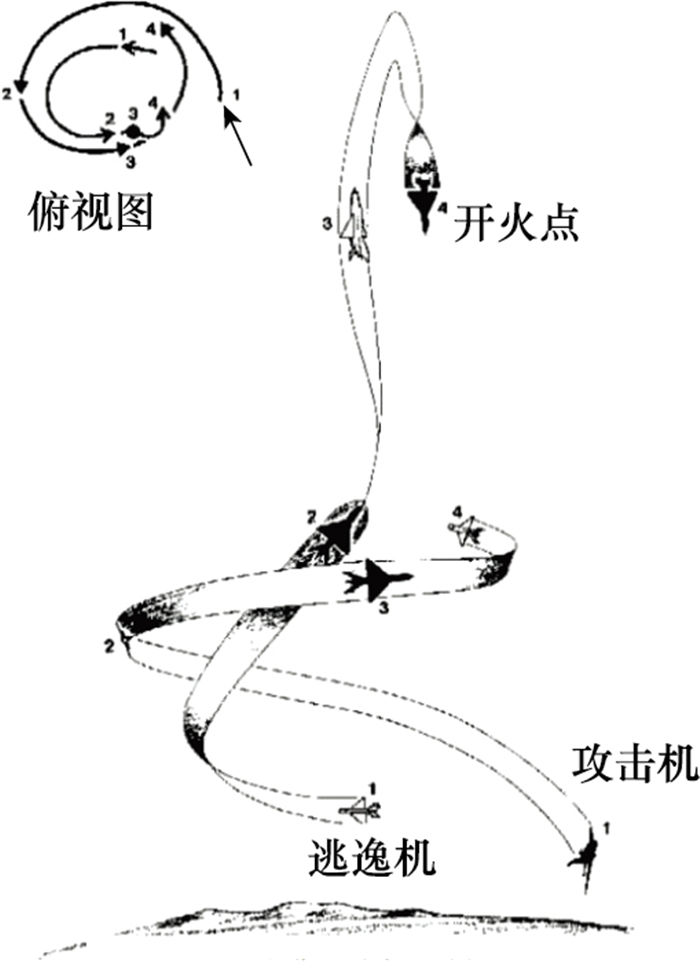
Table 2
If-then rule retrieval table"
| IF | THEN |
| (LR is S)and(Lv is L)and(Lγ is M)and(Lh is M)and(LW is 1) | (DZ is 11) |
| (LR is S)and(Lv is L)and(Lγ is L)and(Lh is M)and(LW is 4) | (DZ is 7) |
| (LR is S)and(Lv is M)and(Lγ is L)and(Lh is L)and(LW is 4) | (DZ is 6) |
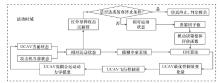
Fig.6
Decision block diagram of UCAV escape maneuver based on the combination of fuzzy expert system and DSC-JADE algorithm"
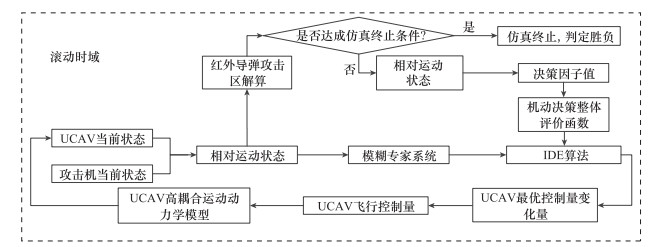
Table 3
Algorithm parameter setting table"
| 算法名称 | 参数设置 |
| DE | F0=0.8, CR0=0.6 |
| ACO | α=0.3, β=0.2, μ=0.9 |
| PSO | C1=1.5, C2=1.5, ω=0.8 |
| GA | Pc=0.6, Pm=0.05 |
Fig.7
Both sides maneuver trajectory graph obtained by DES-JADE algorithm maneuver decision"
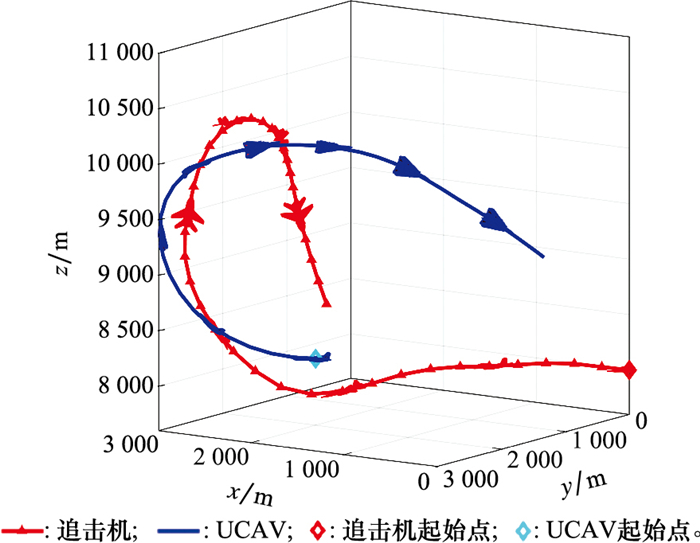
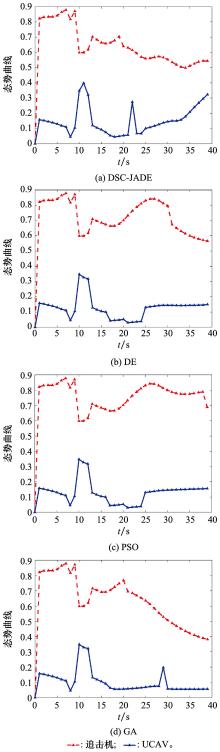
Fig.8
Overall situation change curve of both sides using DES-JADE, DE, PSO and GA algorithm"
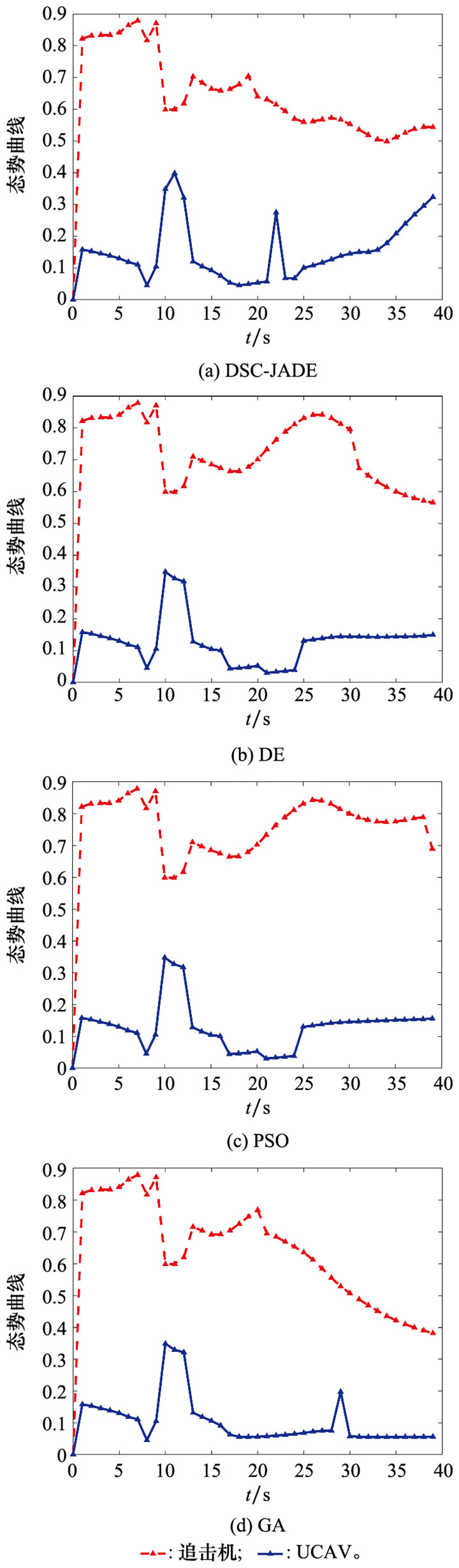
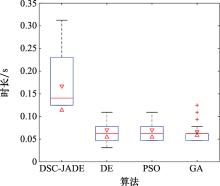
Fig.9
Duration box line for algorithm"

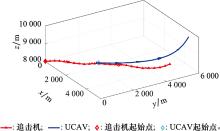
Fig.10
Maneuvering trajectory diagram of a pursuing aircraft against a UCAV without expert system with decision process"
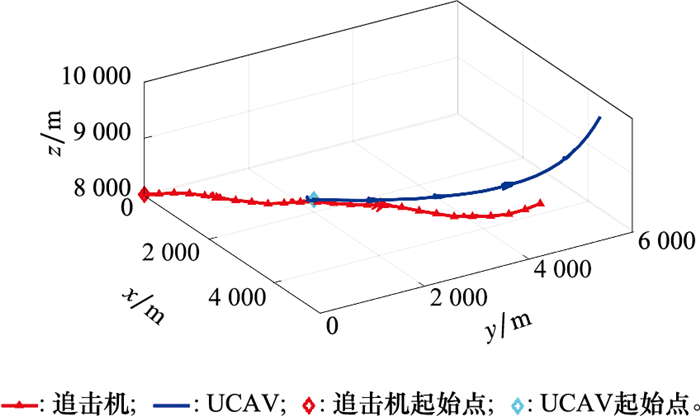
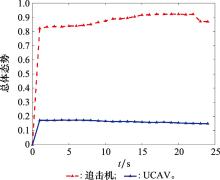
Fig.11
Overall situation change curve of the pursuit aircraft against the UCAV without the expert system"

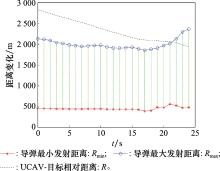
Fig.12
Change curve of the relative distance between the pursuit aircraft and the system without the expert and the missile launching distance"
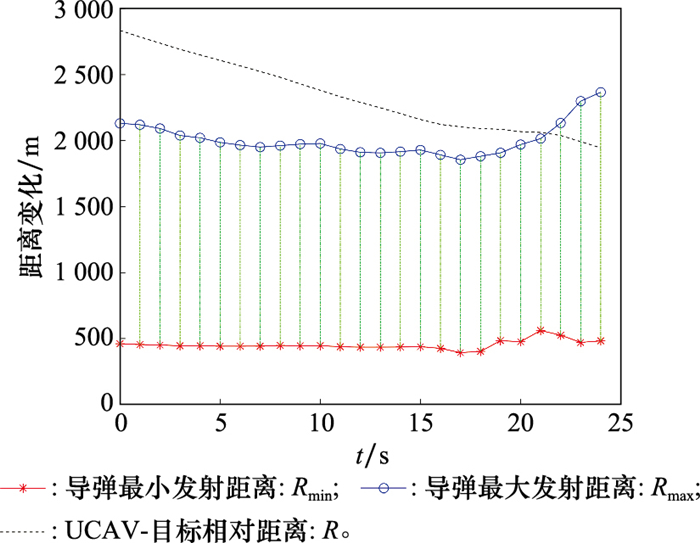
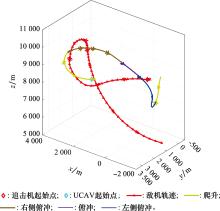
Fig.13
Maneuvering trajectory diagram of a pursuing aircraft against a UCAV with expert system with decision process"
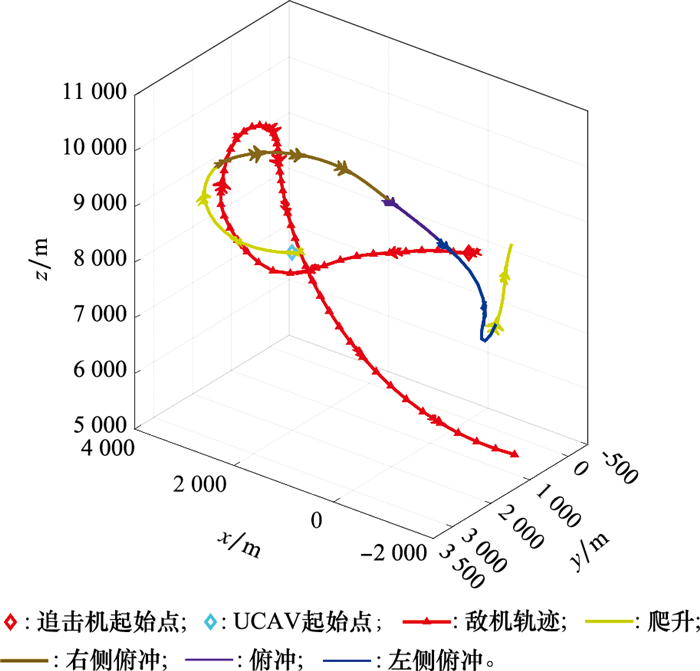

Fig.14
Overall situation change curve of the pursuit aircraft against the UCAV with the expert system"
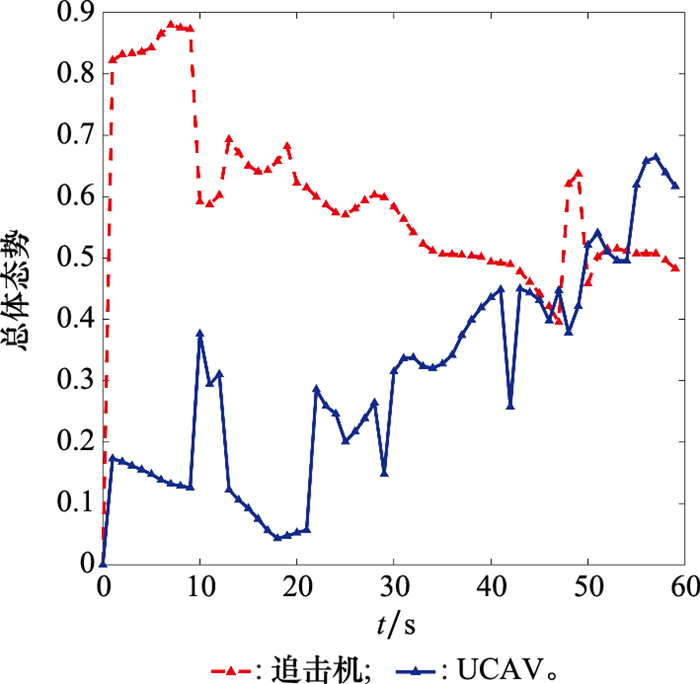

Fig.15
Change curve of the relative distance between the pursuit aircraft and the UCAV with the expert system and the missile launching distance"
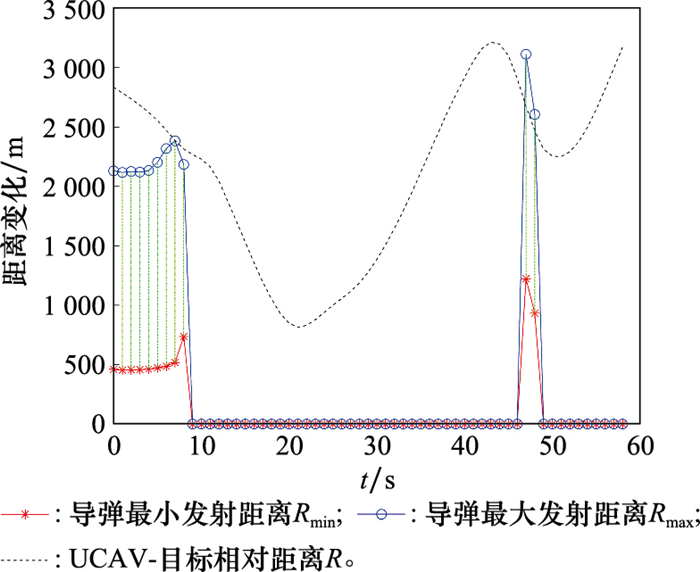
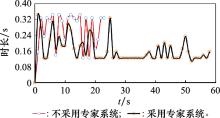
Fig.16
Change curve of the time used for each step of decision-making with and without the expert system"
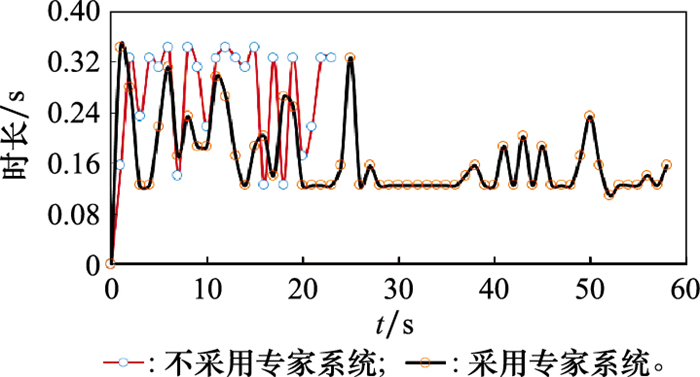
Table 4
Statistical results of 100 Monte Carlo air combat simulation experiments"
| 是否采用专家系统 | UCAV逃逸成功/次 | 追击机获胜/次 | 超出飞行区域/次 | 逃逸成功率/% |
| 采用专家系统 | 72 | 16 | 12 | 72 |
| 不采用专家系统 | 43 | 36 | 21 | 43 |
| 1 | AUSTIN F, CARBONE G, FALCO M, et al. Automated maneuvering decisions for air-to-air combat[C]//Proc. of the Gui-dance, Navigation and Control Conference, 1987: 2393. |
| 2 |
PARK H , LEE B Y , TAHK M J , et al. Differential game based air combat maneuver generation using scoring function matrix[J]. International Journal of Aeronautical and Space Sciences, 2016, 17 (2): 204- 213.
doi: 10.5139/IJASS.2016.17.2.204 |
| 3 |
MCGREW J S , HOW J P , WILLIAMS B , et al. Air-combat strategy using approximate dynamic programming[J]. Journal of Guidance, Control, and Dynamics, 2010, 33 (5): 1641- 1654.
doi: 10.2514/1.46815 |
| 4 |
YANG Z , ZHOU D Y , PIAO H Y , et al. Evasive maneuver strategy for UCAV in beyond-visual-range air combat based on hierarchical multi-objective evolutionary algorithm[J]. IEEE Access, 2020, 8, 46605- 46623.
doi: 10.1109/ACCESS.2020.2978883 |
| 5 |
POROPUDAS J , VIRTANEN K . Game-theoretic validation and analysis of air combat simulation models[J]. IEEE Trans.on Systems, Man, and Cybernetics Part A: Systems and Humans, 2010, 40 (5): 1057- 1070.
doi: 10.1109/TSMCA.2010.2044997 |
| 6 | TENG T H, TAN A H, TAN Y S, et al. Self-organizing neural networks for learning air combat maneuvers[C]//Proc. of the IEEE International Joint Conference on Neural Networks, 2012. |
| 7 | LI B , LIANG S Y , CHEN D Q , et al. A decision-making method for air combat maneuver based on hybrid deep learning network[J]. Chinese Journal of Electronics, 2022, 31 (1): 107- 115. |
| 8 |
KONG W R , ZHOU D Y , YANG Z , et al. Maneuver strategy generation of UCAV for within visual range air combat based on multi-agent reinforcement learning and target position prediction[J]. Applied Sciences, 2020, 10 (15): 5198.
doi: 10.3390/app10155198 |
| 9 | YANG Q M , ZHANG J D , SHI G Q , et al. Maneuver decision of UAV in short-range air combat based on deep reinforcement learning[J]. IEEE Access, 2019, 8, 363- 378. |
| 10 | 傅莉, 谢福怀, 孟光磊, 等. 基于滚动时域的无人机空战决策专家系统[J]. 北京航空航天大学学报, 2015, 41 (11): 1994- 1999. |
| FU L , XIE F H , MENG G L , et al. An UAV air-combat decision expert system based on receding horizon control[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41 (11): 1994- 1999. | |
| 11 | FU Z W , LI Z W , QIANG X M , et al. Tactical decision-making method based on receding horizon control for air combat[J]. Electronics Optics & Control, 2013, 20 (3): 20- 29. |
| 12 |
WILLIAMS P . Three-dimensional aircraft terrain-following via real-time optimal control[J]. Journal of Guidance, Control, and Dynamics, 2007, 30 (4): 1201- 1206.
doi: 10.2514/1.29145 |
| 13 | GRAUER J A, MORELLI E A. A generic nonlinear aerodynamic model for aircraft[C]//Proc. of the AIAA Atmospheric Flight Mechanics Conference, 2014. |
| 14 |
邓可, 彭宣淇, 周德云. 基于矩阵对策与遗传算法的无人机空战决策[J]. 火力与指挥控制, 2019, 44 (12): 61- 66. 61-66, 71
doi: 10.3969/j.issn.1002-0640.2019.12.013 |
|
DENG K , PENG X Q , ZHOU D Y . Study on air combat decision method of UAV based on matrix game and genetic algorithm[J]. Fire Control & Command Control, 2019, 44 (12): 61- 66. 61-66, 71
doi: 10.3969/j.issn.1002-0640.2019.12.013 |
|
| 15 | 张堃, 周德云. 空战目标机规避仿真设计研究[J]. 计算机仿真, 2008, 11, 98- 100. 98-100, 123 |
| ZHANG K , ZHOU D Y . Design of the intelligent target of air combat[J]. Computer Simulation, 2008, 11, 98- 100. 98-100, 123 | |
| 16 | 王杰, 丁达理, 许明, 等. 基于目标逃逸机动预估的空空导弹可发射区[J]. 北京航空航天大学学报, 2019, 45 (4): 722- 734. |
| WANG J , DING D L , XU M , et al. Air-to-air missile launchable area based on target escape maneuver estimation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45 (4): 722- 734. | |
| 17 |
HUANG C Q , DONG K S , HUANG H Q , et al. Autonomous air combat maneuver decision using Bayesian inference and moving horizon optimization[J]. Journal of Systems Engineering and Electronics, 2018, 29 (1): 86- 97.
doi: 10.21629/JSEE.2018.01.09 |
| 18 | 高申玉. 多机空战战术机动专家系统与决策支持系统研究[J]. 系统工程理论与实践, 1999, 19 (8): 77- 80. 77-80, 127 |
| GAO S Y . Research on expert system and decision support system for multiple air combat tactical maneuvering[J]. Systems Engineering Theory&Practice, 1999, 19 (8): 77- 80. 77-80, 127 | |
| 19 | FU L, XIE F H, WANG D Z, et al. The overview for UAV air-combat decision method[C]//Proc. of the 26th Chinese Control and Decision Conference, 2014: 3380-3384. |
| 20 | 董肖杰, 余敏建, 宋帅. 空战机动动作库及控制算法设计研究[C]//第五届中国指挥控制大会论文集, 2017: 188-193. |
| DONG X J, YU M J, SONG S. Research on the design of air combat maneuver library and control arithmetic of movements[C]//Proc. of the 5th China Command and Control Conference, 2017: 188-193. | |
| 21 | AHMAD I S , ABUBAKAR S , GAMBO F L , et al. A rule-based expert system for automobile fault diagnosis[J]. International Journal on Perceptive and Cognitive Computing, 2021, 7 (1): 20- 25. |
| 22 | 王炫, 王维嘉, 宋科璞, 等. 基于进化式专家系统树的无人机空战决策技术[J]. 兵工自动化, 2019, 38 (1): 42- 47. |
| WANG X , WANG W J , SONG K P , et al. UAV air combat decision based on evolutionary expert system tree[J]. Ordnance Industry Automation, 2019, 38 (1): 42- 47. | |
| 23 | SMITH R E, DIKE B A, RAVICHANDEAN B, et al. The fighter aircraft LCS: a case of different LCS goals and techniques[C]//Proc. of the International Workshop on Learning Classifier Systems, 1999: 283-300. |
| 24 | SMITH R E , DIKE B A , MEHRA R K , et al. Classifier systems in combat: two-sided learning of maneuvers for advanced fighter aircraft[J]. Computer Methods in Applied Mechanics and Engineering, 2000, 186 (2/4): 421- 437. |
| 25 | SHAW R L . Fighter combat tactics and maneuvering[M]. 5th ed Maryland: Maryland Naval Institute Press, 1987. |
| 26 | POLAKOVA R. L-SHADE with competing strategies applied to constrained optimization[C]//Proc. of the IEEE Congress on Evolutionary Computation, 2017: 1683-1689. |
| 27 |
ZHANG J , SANDERSON A C . JADE: adaptive differential evolution with optional external archive[J]. IEEE Trans.on Evolutionary Computation, 2009, 13 (5): 945- 958.
doi: 10.1109/TEVC.2009.2014613 |
| 28 |
KAELO P , ALI M M . A numerical study of some modified differential evolution algorithms[J]. European Journal of Operational Research, 2006, 169 (3): 1176- 1184.
doi: 10.1016/j.ejor.2004.08.047 |
| 29 | TVRDIK J, POLAKOVA R. Competitive differential evolution applied to CEC 2013 problems[C]//Proc. of the IEEE Congress on Evolutionary Computation, 2013: 1651-1657. |
| 30 | 王杰, 丁达理, 陈诚, 等. 导弹攻击状态评估下的UCAV试探机动决策[J]. 哈尔滨工业大学学报, 2021, 53 (6): 118- 127. |
| WANG J , DING D L , CHEN C , et al. UCAV trial maneuvering decision under missile attack state assessment[J]. Journal of Harbin Institute of Technology, 2021, 53 (6): 118- 127. |
| [1] | ZHAO Yu, ZHANG Bin, XU An, LI Hong-ke. Two-fighter cooperative tactics maneuvering game and approximate optimal solution [J]. Systems Engineering and Electronics, 2015, 37(3): 589-593. |
| [2] | HUANG Chang-qiang,LIU He-ming,HUANG Han-qiao, CHENG Hua, CHEN Shao-hua. Online UCAV attacking trajectory planning in uncertain environment [J]. Systems Engineering and Electronics, 2014, 36(8): 1558-1565. |
| [3] | WU Xu-zhong, TANG Sheng-jing, GUO Jie, XIONG Jun-hui. Trajectory tracking guidance law for reentry based on receding horizon control [J]. Systems Engineering and Electronics, 2014, 36(8): 1602-1608. |
| [4] | ZHANG Tao,YU Lei,ZHOU Zhong-liang,WANG Lin. Decision-making for air combat maneuvering based on hybrid algorithm [J]. Journal of Systems Engineering and Electronics, 2013, 35(7): 1445-1450. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||