Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (12): 3667-3675.doi: 10.12305/j.issn.1001-506X.2022.12.10
• Sensors and Signal Processing • Previous Articles Next Articles
Vegetation height inversion method based on light-weighted and small UAV-radar
Zhipeng WU1,2,3, Ping ZHANG1,2,*, Zhen LI1,2, Lei HUANG1,2, Chang LIU1,2,3, Shuo GAO1,2,3
- 1. Aerospace Information Research Institute, Chinese Academy of Sciences, Beijing 100094, China
2. Key Laboratory of Earth Observation of Hainan Province, Sanya Institute of Remote Sensing, Sanya 572029, China
3. University of Chinese Academy of Sciences, Beijing 100049, China
-
Received:2021-06-21Online:2022-11-14Published:2022-11-24 -
Contact:Ping ZHANG
CLC Number:
Cite this article
Zhipeng WU, Ping ZHANG, Zhen LI, Lei HUANG, Chang LIU, Shuo GAO. Vegetation height inversion method based on light-weighted and small UAV-radar[J]. Systems Engineering and Electronics, 2022, 44(12): 3667-3675.
share this article

Fig.1
Hardware composition of unmanned aerial vehicle radar synergy"
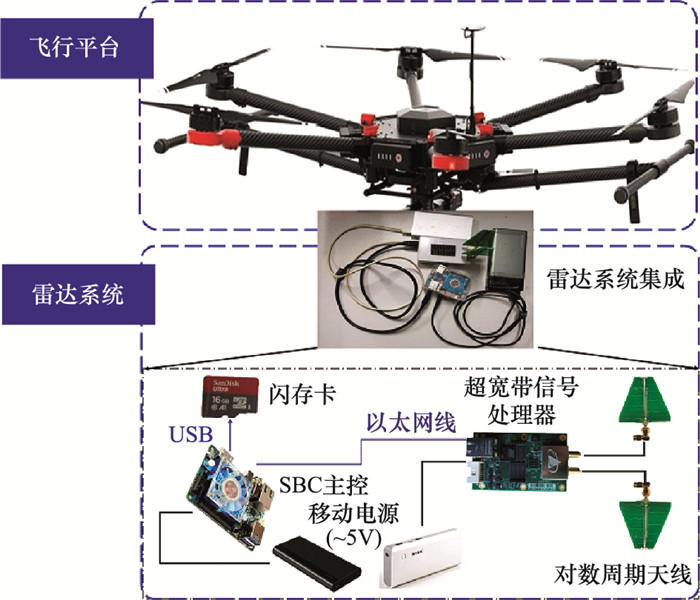
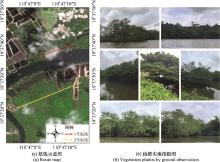
Fig.2
Study area"
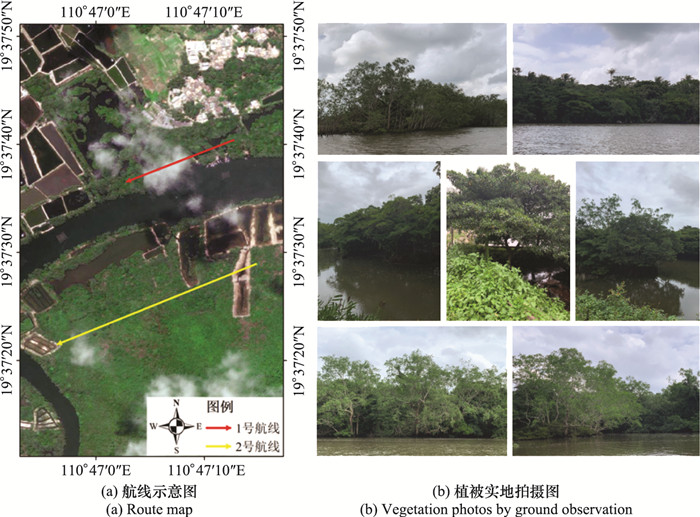

Fig.3
Flowchart of data processing method"

Fig.4
Radar signal simulation and analysis"


Fig.5
Radar complex image data"
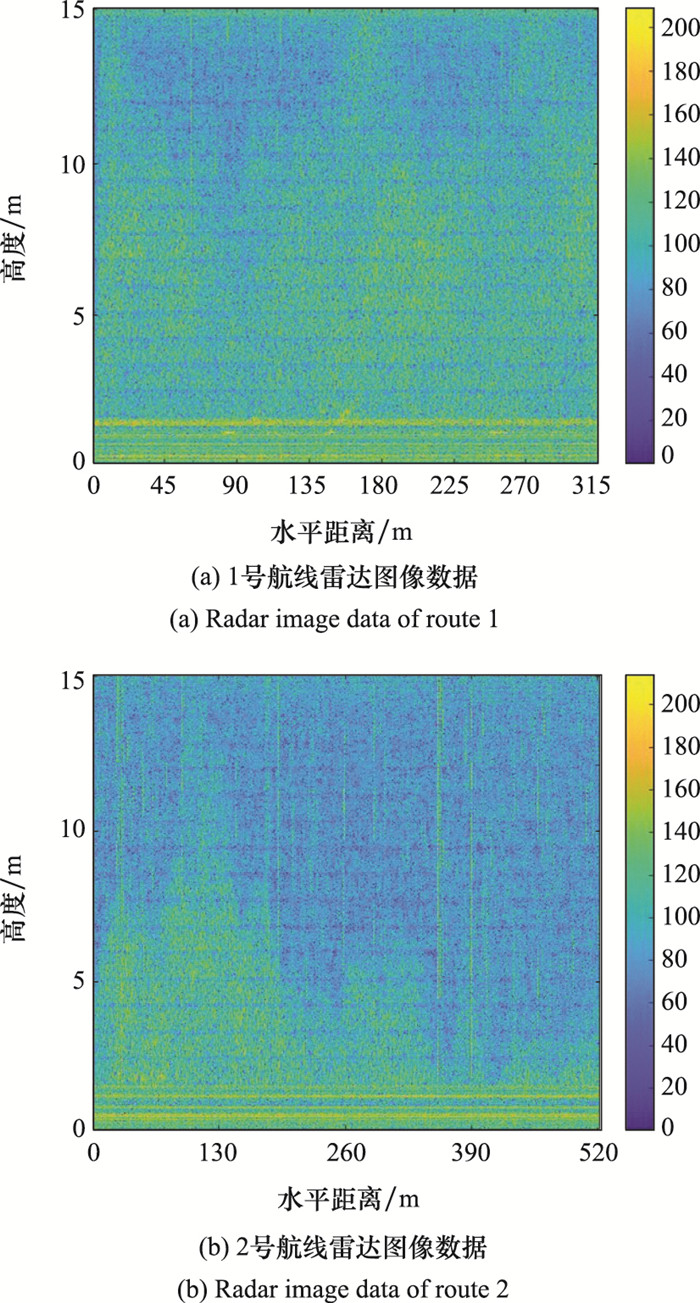
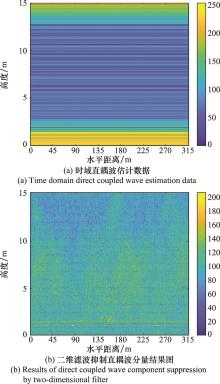
Fig.6
Direct coupled wave suppression by two-dimensional filtering method"
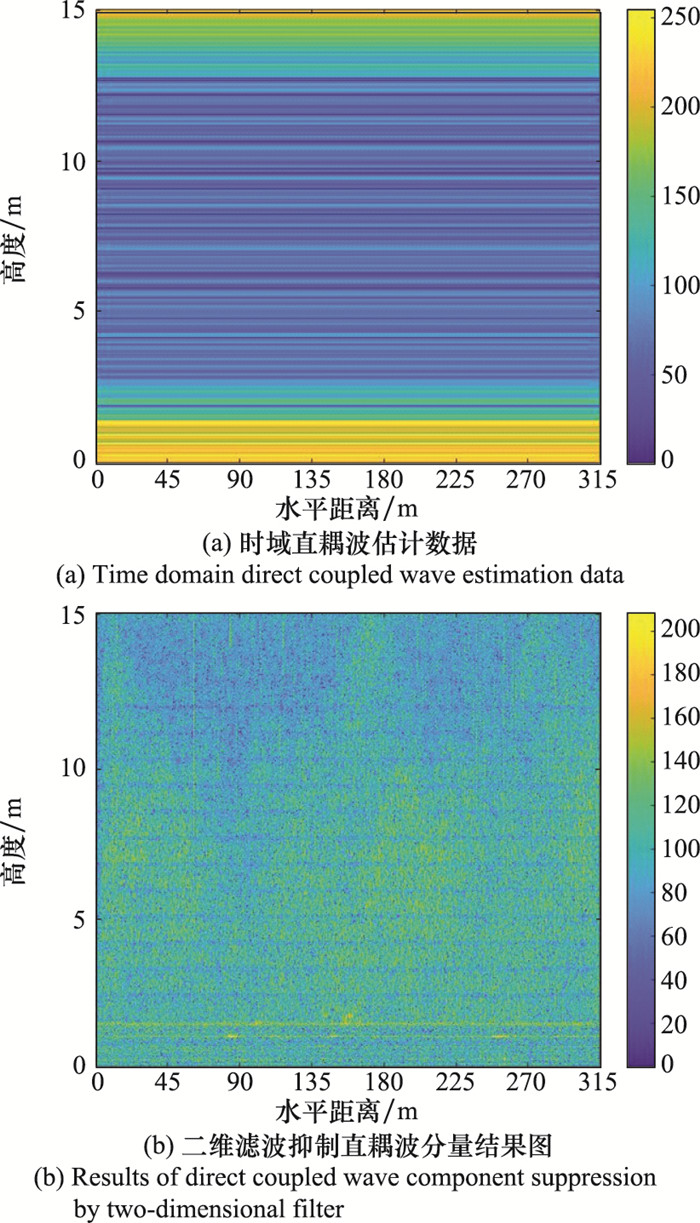
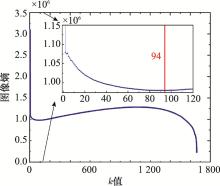
Fig.7
Entropy varies with k"
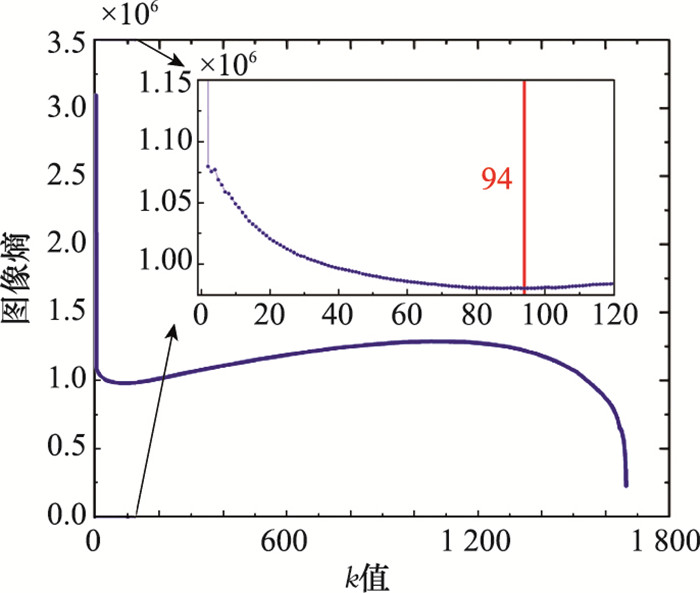

Fig.8
Denoising result of adaptive principal component analysis method based on residual image entropy"
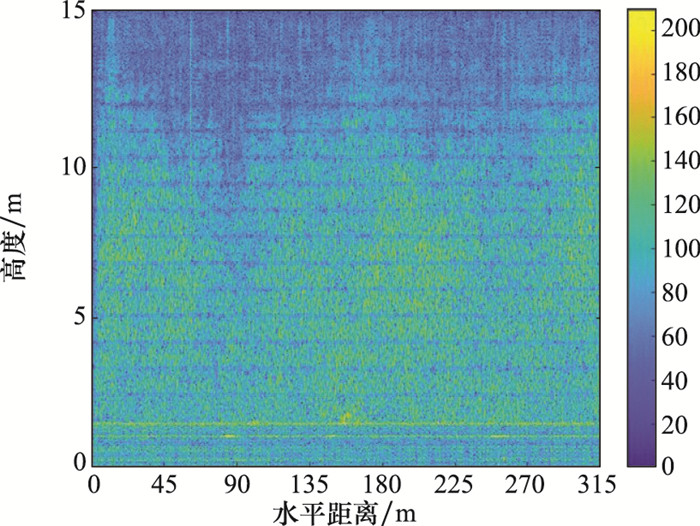

Fig.9
Back-projection algorithm processing results based on cross-correlation information for different routes"
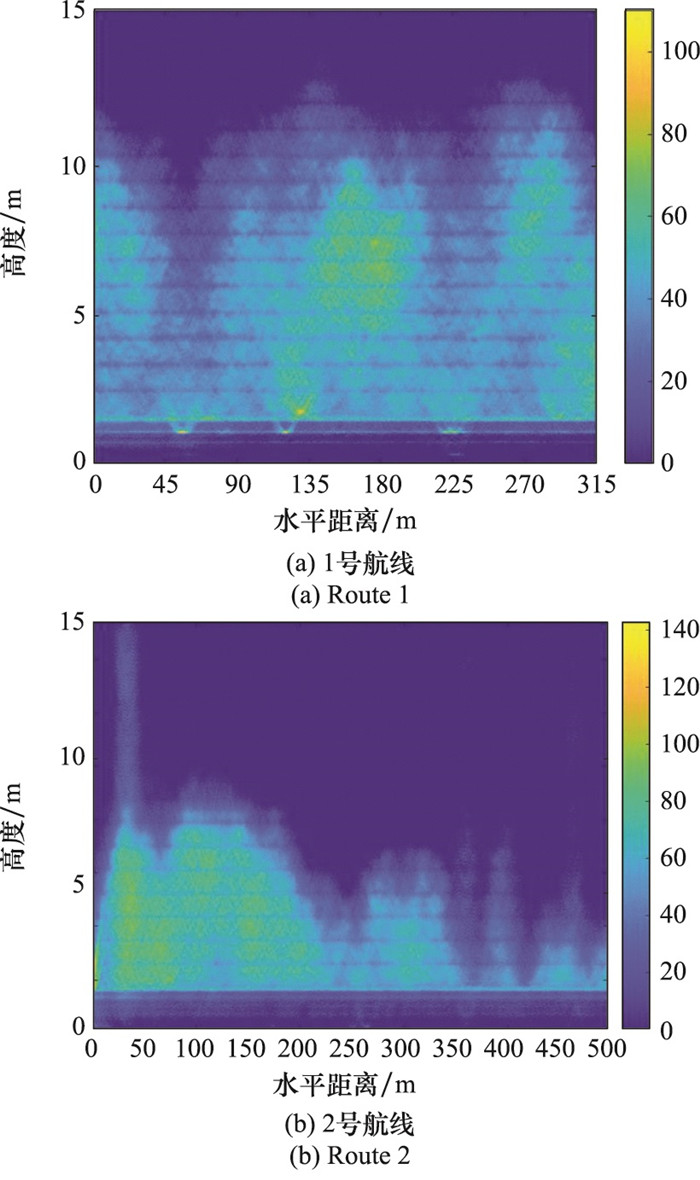

Fig.10
Schematic diagram of vegetation scattering mechanism"
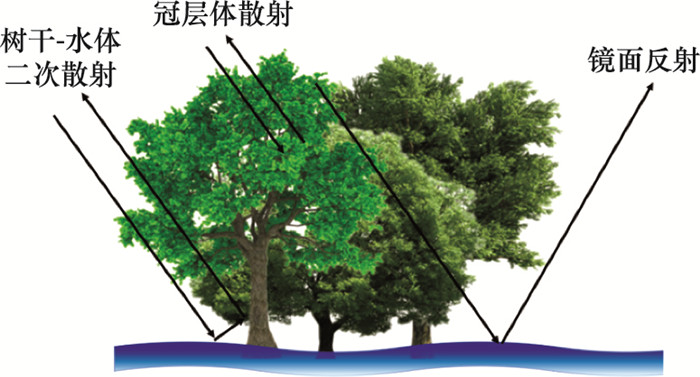
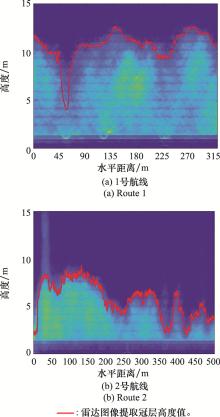
Fig.11
Inversion result of vegetation canopy height from radar data for different routes"
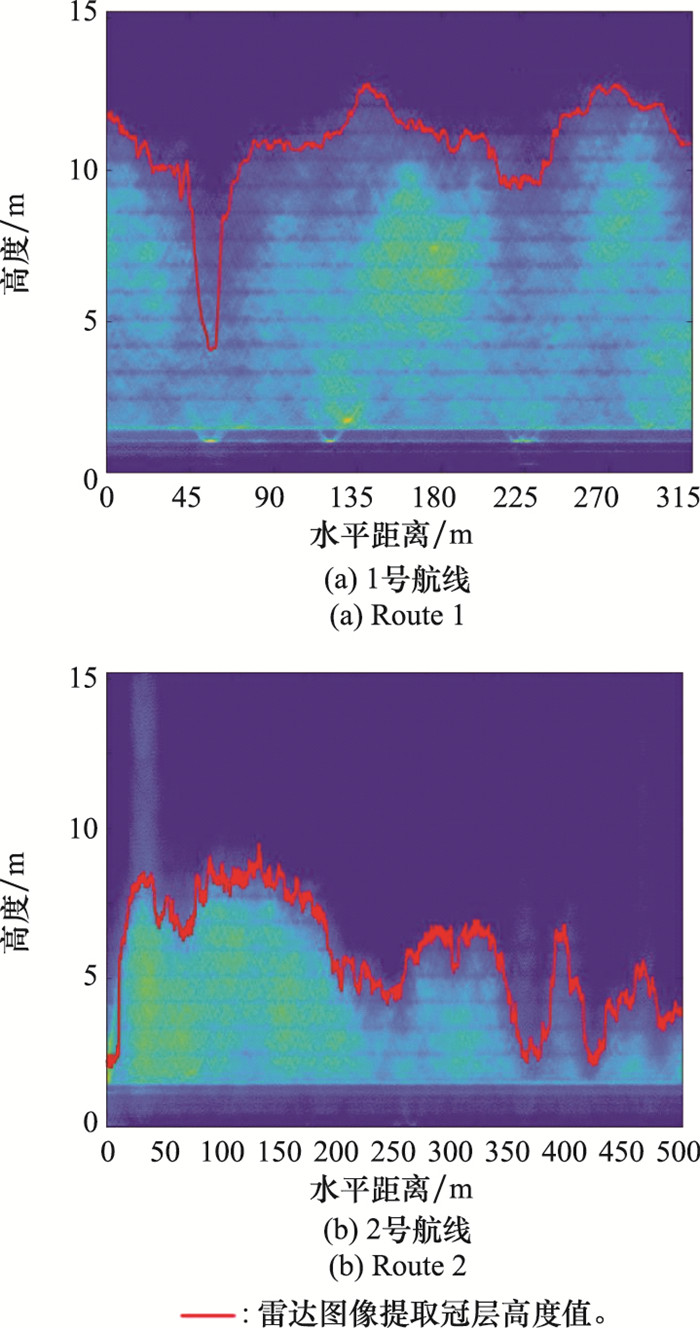
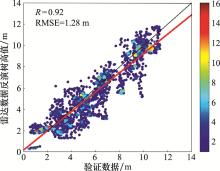
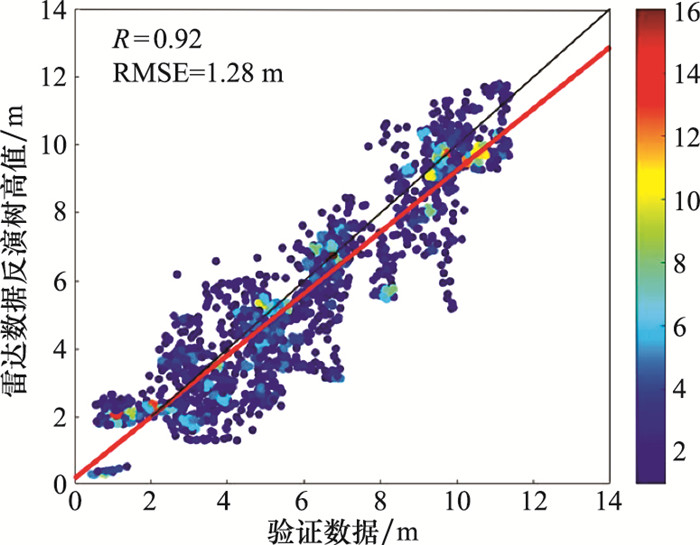
Fig.12
Accuracy of vegetation height inversion from unmanned aerial vehicle radar data"
| 1 |
DUBAYAH R O , SHELDON S L , CLARK D B , et al. Estimation of tropical forest height and biomass dynamics using lidar remote sensing at La Selva, Costa Rica[J]. Journal of Geophysical Research Atmospheres, 2010, 115 (G2)
doi: 10.1029/2009JG000933 |
| 2 | 李增元, 陈尔学. 中国林业遥感发展历程[J]. 遥感学报, 2021, 25 (1): 292- 301. |
| LI Z Y , CHEN E X . Development course of forestry remote sensing in China[J]. National Remote Sensing Bulletin, 2021, 25 (1): 292- 301. | |
| 3 |
TAO S L , GUO Q H , LI C , et al. Global patterns and determinants of forest canopy height[J]. Ecology, 2016, 97 (12): 3265- 3270.
doi: 10.1002/ecy.1580 |
| 4 |
ZHANG J , NIELSEN S , MAO L F , et al. Regional and historical factors supplement current climate in shaping global forest canopy height[J]. Journal of Ecology, 2016, 104 (2): 469- 478.
doi: 10.1111/1365-2745.12510 |
| 5 | 张继贤, 刘飞, 王坚. 轻小型无人机测绘遥感系统研究进展[J]. 遥感学报, 2021, 25 (3): 708- 724. |
| ZHANG J X , LIU F , WANG J . Review of the light-weighted and small UAV system for aerial photography and remote sensing[J]. National Remote Sensing Bulletin, 2021, 25 (3): 708- 724. | |
| 6 |
YAO H , QIN R J , CHEN X Y . Unmanned aerial vehicle for remote sensing applications-a review[J]. Remote Sensing, 2019, 11 (12): 1443.
doi: 10.3390/rs11121443 |
| 7 |
KRAUSE S , SANDERS T , MUND J P , et al. UAV-based photogrammetric tree height measurement for intensive forest monitoring[J]. Remote Sensing, 2019, 11 (7): 758.
doi: 10.3390/rs11070758 |
| 8 |
CHEN Y W , HAKALA T , KARJALAINEN M , et al. UAV-borne profiling radar for forest research[J]. Remote Sensing, 2017, 9 (1): 58.
doi: 10.3390/rs9010058 |
| 9 |
LIU K , SHEN X , CAO L , et al. Estimating forest structural attributes using UAV-LiDAR data in Ginkgo plantations[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018, 146, 465- 482.
doi: 10.1016/j.isprsjprs.2018.11.001 |
| 10 |
NEUVILLE R , BATES J S , JONARD F . Estimating forest structure from uav-mounted LiDAR point cloud using machine learning[J]. Remote Sensing, 2021, 13 (3): 352.
doi: 10.3390/rs13030352 |
| 11 |
ZHOU L F , GU X H , CHENG S , et al. Analysis of plant height changes of lodged maize using UAV-LiDAR data[J]. Agriculture, 2020, 10 (5): 146.
doi: 10.3390/agriculture10050146 |
| 12 | HENSLEY S, AHMED R, CHAPMAN B, et al. A comparison of L-band and S-band interferometry and tomography of the BERMS borel forest with UAVSAR and F-SAR datasets[C]//Proc. of the EUSAR 13th European Conference on Synthetic Aperture, 2021. |
| 13 | 赵明波, 何峻, 付强. 激光雷达含噪距离像仿真实现与影响因素分析[J]. 系统工程与电子技术, 2011, 33 (8): 1770- 1777. |
| ZHAO M B , HE J , FU Q . Simulation implementation and influenc-ing factors analysis of ladar rang images with noise[J]. Systems Engineering and Electronics, 2011, 33 (8): 1770- 1777. | |
| 14 |
WALLACE L , LUCIEER A , WATSON C . Evaluating tree detection and segmentation routines on very high resolution UAV LiDAR data[J]. IEEE Trans.on Geoscience and Remote Sensing, 2014, 52 (12): 7619- 7628.
doi: 10.1109/TGRS.2014.2315649 |
| 15 |
ZHANG X , BAO Y H , WANG D L , et al. Using UAV LiDAR to extract vegetation parameters of inner Mongolian grassland[J]. Remote Sensing, 2021, 13 (4): 656.
doi: 10.3390/rs13040656 |
| 16 | GUO Q H , SU Y J , HU T Y , et al. An integrated UAV-borne lidar system for 3D habitat mapping in three forest ecosystems across China[J]. International Journal of Remote Sensing, 2017, 38 (8): 1- 19. |
| 17 |
SANKEY T , DONAGER J , MCVAY J , et al. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA[J]. Remote Sensing of Environment, 2017, 195, 30- 43.
doi: 10.1016/j.rse.2017.04.007 |
| 18 | 李震, 张平, 乔海伟, 等. 层析SAR地表参数信息提取研究进展[J]. 雷达学报, 2021, 10 (1): 116- 130. |
| LI Z , ZHANG P , QIAO H W , et al. Advances in information extraction of surface parameters using tomographic SAR[J]. Journal of Radars, 2021, 10 (1): 116- 130. | |
| 19 | HENSLEY S, MICHEL T, NUEMANN M, et al. Some first polarimetric-interferometric multi-baseline and tomographic results at Harvard forest using UAVSAR[C]//Proc. of the IEEE International Geoscience and Remote Sensing Symposium, 2012. |
| 20 |
EL MOUSSAWI I , HO TONG MINH D , BAGHDADI N , et al. L-Band UAVSAR tomographic imaging in dense forests: gabon forests[J]. Remote Sensing, 2019, 11 (5): 475.
doi: 10.3390/rs11050475 |
| 21 | ASOPA U , KUMAR S . UAVSAR tomography for vertical profile generation of tropical forest of mondah national park, gabon[J]. Earth and Space Science, 2020, 7 (10): 1- 14. |
| 22 | LAVALLE M, HAWKINS B, HENSLEY S. Tomographic imaging with UAVSAR: current status and new results from the AfriSAR campaign[C]//Proc. of the IEEE International Geoscience and Remote Sensing Symposium, 2017. |
| 23 | HENSLEY S, CHAPMAN B, LAVALLE M, et al. Tomographic experiments at L-band and P-band in boreal forests with the UAVSAR System[C]//Proc. of the EUSAR 12th European Conference on Synthetic Aperture Radar, 2018. |
| 24 | LUDENO G, CATAPANO I, GENNARELLI G, et al. A micro-UAV-borne system for radar imaging: a feasibility study[C]//Proc. of the 9th International Workshop on Advanced Ground Penetrating Radar, 2017. |
| 25 | 赵志欣, 周新华, 朱斯航, 等. 基于波形特征的外辐射源雷达杂波抑制算法[J]. 系统工程与电子技术, 2018, 40 (9): 1966- 1972. |
| ZHAO Z X , ZHOU X H , ZHU S H , et al. Waveform characteristic based clutter suppression algorithm for passive bistatic radar[J]. Systems Engineering and Electronics, 2018, 40 (9): 1966- 1972. | |
| 26 | CAGNOLI B , ULRYCH T J . Singular value decomposition and wavy reflections in ground-penetrating radar images of base surge deposits[J]. Journal of Applied Geophysics, 2001, 48 (3): 175- 182. |
| 27 | 郑晨, 席晓莉, 宋忠国, 等. 基于子空间技术中奇异向量分析的穿墙雷达杂波抑制方法[J]. 电子学报, 2019, 47 (4): 848- 854. |
| ZHENG C , XI X L , SONG Z G , et al. A singular vector stationarity method for clutter mitigation in through-the-wall radar based on subspace method[J]. Acta Electronica Sinica, 2019, 47 (4): 848- 854. | |
| 28 | 高守传, 黄春琳, 粟毅. 主元分析法去除瞬态系统收发耦合波研究[J]. 电子与信息学报, 2004, 26 (9): 1461- 1467. |
| GAO S C , HUANG C L , SU Y . Principal component analysis method to suppress TX/RX coupled interference[J]. Journal of Electronics & Information Technology, 2004, 26 (9): 1461- 1467. | |
| 29 | TAN X Q, WANG J X, LIU Z, et al. A sampling algorithm of non-band limited signals based on SVD[C]//Proc. of the IEEE International Symposium on Knowledge Acquisition and Modeling Workshop, 2008. |
| 30 | 张春城, 周正欧. 浅地层探地雷达自动目标检测与定位研究[J]. 电子与信息学报, 2005, 27 (7): 1065- 1068. |
| ZHANG C C , ZHOU Z O . Research on automatic target detection and orientation of ground penetrating radar in shallow subsurface application[J]. Journal of Electronics & Information Technology, 2005, 27 (7): 1065- 1068. | |
| 31 | XU X, MILLER E. Entropy optimized contrast stretch to enhance remote sensing imagery[C]//Proc. of the IEEE 16th International Conference on Pattern Recognition, 2002. |
| 32 | ZHOU L , HUANG C L , SU Y . A fast back-projection algorithm based on cross correlation for GPR imaging[J]. IEEE Geoscience and Remote Sensing Letters, 2012, 9 (2): 228- 232. |
| 33 | TEBALDINI S , ROCCA F . Multibaseline polarimetric SAR tomography of a boreal forest at P-and L-Bands[J]. IEEE Trans.on Geoscience and Remote Sensing, 2012, 50 (1): 232- 246. |
| [1] | Shuangshuang WANG, Chuntao LI, Zhen WANG, Zikang SU, Fei DAI. Design of carrier landing controller based on adaptive dynamic inversion [J]. Systems Engineering and Electronics, 2022, 44(1): 218-225. |
| [2] | XU Ning, SUN Kang, HU Yuxin, GENG Xiurui. Improved endmember extraction method based on fast Gram determinant analysis for hyperspectral imagery [J]. Systems Engineering and Electronics, 2019, 41(9): 1913-1921. |
| [3] | TANG Shengjing, LI Mengting, LIU Zhenchang, GUO Jie. Transition maneuver flight control for a tandemwing VTOL UAV [J]. Systems Engineering and Electronics, 2019, 41(6): 1342-1350. |
| [4] | ZHONG Jingyang, SONG Bifeng. Position control of a tail-sitter MAV based on L1 adaptive controller in hover stage [J]. Systems Engineering and Electronics, 2018, 40(9): 2062-2070. |
| [5] | YANG Chao, CHEN Jing, WANG Yizhi, GUO Lixin. Inversion of atmospheric duct from the radar sea clutter with the improved backtracking search algorithm [J]. Systems Engineering and Electronics, 2018, 40(8): 1743-1749. |
| [6] | WANG Linyu, GUO Hao, XIANG Jianhong, QI Liangang. Anti-jamming technology based on genetic matrix adjoint inversion algorithm [J]. Systems Engineering and Electronics, 2017, 39(8): 1677-1683. |
| [7] | CHENG Pengfei, WU Chengfu. Neural network based robust adaptive nonlinear control for#br# aircraft under one side of wing loss [J]. Systems Engineering and Electronics, 2016, 38(3): 607-617. |
| [8] | ZHANG You-an, WU Hua-li, LIANG Yong, ZHANG Jin-peng. Three-dimensional head pursuit guidance law considering dynamic characteristics of uncertain hybrid control system [J]. Systems Engineering and Electronics, 2015, 37(6): 1354-1361. |
| [9] | YANG Jing, SHI Xiaoping. NDI formation controller design for UAV based on #br# super twisting algorithm [J]. Systems Engineering and Electronics, 2014, 36(7): 1380-1385. |
| [10] | ZHOU Bin1,2, ZHAO Anbang1,2, GONG Qiang3, SONG Xuejing1,2. Underwater acoustic array SMIMVDR spatial spectral estimation#br# based on diagonal reduction [J]. Systems Engineering and Electronics, 2014, 36(12): 2381-2387. |
| [11] | ZHU Qi-dan,MENG Xue,ZHANG Zhi. Design of longitudinal carrier landing system using nonlinear dynamic inversion and sliding mode control [J]. Systems Engineering and Electronics, 2014, 36(10): 2037-2042. |
| [12] | MIAO Jing-hong, LUO Wei, LI Jie, QI Ji. Extended scheme based on the contrast source inversion method applied in 3-D microwave imaging [J]. Systems Engineering and Electronics, 2014, 36(10): 2089-2093. |
| [13] | LIAN Pei-yuan,WANG Wei,ZHANG Shu-xin,YANG Gui-geng. Adjustment method of position and orientation of reflector antenna feed based on far field [J]. Systems Engineering and Electronics, 2014, 36(1): 9-15. |
| [14] | ZHENG Ji-shi, JIANG Xin-hua, CHEN Xing-wu. Velocity control design for the small UAV based on the incremental non-linear dynamic inversion [J]. Systems Engineering and Electronics, 2013, 35(9): 1923-1928. |
| [15] | LIU Yi-nan, ZHANG Sheng-xiu, CAO Li-jia, ZHANG Chao. Reconfigurable flight control system design for folding wing air vehicles based on aerodynamic characteristics identification [J]. Journal of Systems Engineering and Electronics, 2013, 35(5): 1037-1044. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||