Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (2): 612-618.doi: 10.12305/j.issn.1001-506X.2022.02.31
• Guidance, Navigation and Control • Previous Articles Next Articles
Eigenvalue analysis of the pinning control system of unmanned aerial vehicle swarm
Jintao LIU, Ming HE*, Ling LUO, Qiang LIU, Minggang YU
- Command and Control Engineering College, Army Engineering University of the PLA, Nanjing 210007, China
-
Received:2021-01-26Online:2022-02-18Published:2022-02-24 -
Contact:Ming HE
CLC Number:
Cite this article
Jintao LIU, Ming HE, Ling LUO, Qiang LIU, Minggang YU. Eigenvalue analysis of the pinning control system of unmanned aerial vehicle swarm[J]. Systems Engineering and Electronics, 2022, 44(2): 612-618.
share this article

Fig.1
Graph mapping of unmanned aerial vehicle swarm"


Fig.2
Effect of μ on the real part of the root locus"

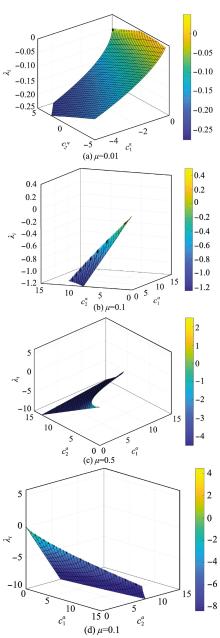
Fig.3
Relationship between λi and μ, c1α, c2α"


Fig.4
Initial state of unmanned aerial vehicle swarm"


Fig.5
Trajectory of unmanned aerial vehicle swarm"

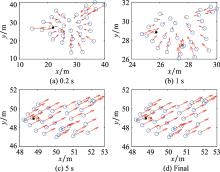
Fig.6
Unmanned aerial vehicle swarm status at different times"
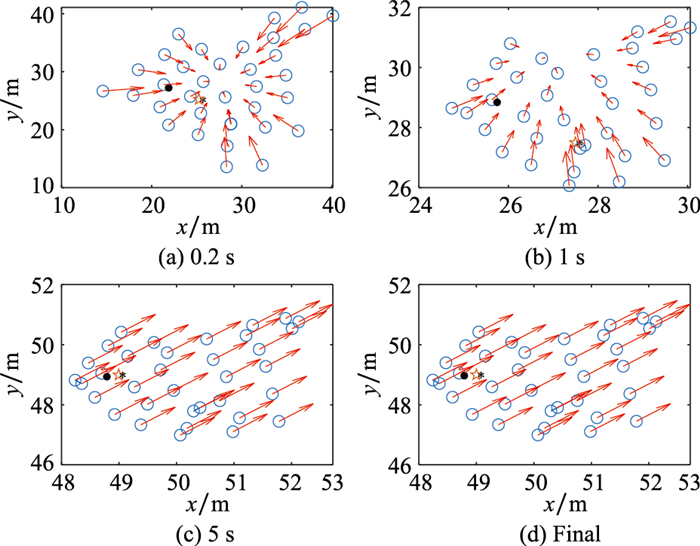

Fig.7
Convergence of x-component of unmanned aerial vehicle swarm tracking speed error"


Fig.8
Convergence of y-component of unmanned aerial vehicle swarm tracking speed error"


Fig.9
Convergence of general velocity error of unmanned aerial vehicle swarm system"

| 1 |
BIDRAM A , DAVOUDI A , LEWIS F L , et al. Secondary control of microgrids based on distributed cooperative control of multi-agent systems[J]. IET Generation, Transmission and Distribution, 2013, 7 (8): 822- 831.
doi: 10.1049/iet-gtd.2012.0576 |
| 2 |
COUZIN I D , KRAUSE J , FRANKS N R , et al. Effective leadership and decision-making in animal groups on the move[J]. Nature, 2005, 433 (7025): 513- 516.
doi: 10.1038/nature03236 |
| 3 | WANG X F , CHEN G . Pinning control of scale-free dynamical networks[J]. Physica A: Statistical Mechanics and its Applications, 2002, 310 (3): 521- 531. |
| 4 |
LI X , WANG X F , CHEN G R . Pinning a complex dynamical network to its equilibrium[J]. IEEE Trans. on Circuits and Systems Ⅰ: Regular Papers, 2004, 51 (10): 2074- 2087.
doi: 10.1109/TCSI.2004.835655 |
| 5 |
CHEN G R . Pinning control and controllability of complex dynamical networks[J]. International Journal of Automation and Computing, 2017, 14 (1): 1- 9.
doi: 10.1007/s11633-016-1052-9 |
| 6 | XIAO F W , CHEN G . Pinning control of scale-free dynamical networks[J]. Physica A: Statistical Mechanics and its Applications, 2002, 310 (3): 521- 531. |
| 7 |
OLFATI-SABER R . Flocking for multi-agent dynamic systems: algorithms and theory[J]. IEEE Trans. on Automatic Control, 2006, 51 (3): 401- 420.
doi: 10.1109/TAC.2005.864190 |
| 8 |
SU H S , WANG X F , LIN Z L . Flocking of multi-agents with a virtual leader[J]. IEEE Trans. on Automatic Control, 2009, 54 (2): 293- 307.
doi: 10.1109/TAC.2008.2010897 |
| 9 |
MOUSAVI S S , HAERI M , MESBAHI M . On the structural and strong structural controllability of undirected networks[J]. IEEE Trans. on Automatic Control, 2018, 63 (7): 2234- 2241.
doi: 10.1109/TAC.2017.2762620 |
| 10 |
AMANI A M , JALILI M , YU X , et al. Controllability of complex networks: choosing the best driver set[J]. Physical Review E, 2018, 98 (3): 030302.
doi: 10.1103/PhysRevE.98.030302 |
| 11 |
GAEINI N , AMANI A M , JALILI M , et al. Cooperative secondary frequency control of distributed generation: the role of data communication network topology[J]. International Journal of Electrical Power and Energy Systems, 2017, 92, 221- 229.
doi: 10.1016/j.ijepes.2017.05.012 |
| 12 | GAEINI N, AMANI A M, JALILI M, et al. Enhancing stability of cooperative secondary frequency control by link rewiring[C]//Proc. of the IEEE 43rd Annual Conference of the Industrial Electronics Society, 2017: 5132-5137. |
| 13 |
PEQUITO S , KAR S , AGUIAR A P . A framework for structural input/output and control configuration selection in large-scale systems[J]. IEEE Trans. on Automatic Control, 2016, 61 (2): 303- 318.
doi: 10.1109/TAC.2015.2437525 |
| 14 | AMANI A M , JALILI M , YU X , et al. Controllability of complex networks: choosing the best driver set[J]. Physical Review E, 2018, 98 (3): 1- 6. |
| 15 | MESBAHI M , EGERSTEDT M . Graph theoretic methods in multiagent networks[M]. Princeton: Princeton University Press, 2010. |
| 16 |
ESTRADA E , RODRÍGUEZ-VELÁZQUEZ J A . Subgraph centrality in complex networks[J]. Physical Review E, 2005, 71 (5): 056103.
doi: 10.1103/PhysRevE.71.056103 |
| 17 |
AMANI A M , JALILI M , YU X , et al. Finding the most influential nodes in pinning controllability of complex networks[J]. IEEE Trans. on Circuits and Systems Ⅱ: Express Briefs, 2017, 64 (6): 685- 689.
doi: 10.1109/TCSII.2016.2601565 |
| 18 |
WATANABE T , MASUDA N . Enhancing the spectral gap of networks by node removal[J]. Physical Review E, 2010, 82 (4): 046102.
doi: 10.1103/PhysRevE.82.046102 |
| 19 | AMANI A M, JALILI M, YU X, et al. A new metric to find the most vulnerable node in complex networks[C]//Proc. of the IEEE International Symposium on Circuits and Systems, 2018: 1-5. |
| 20 |
JALILI M , ASKARI SICHANI O , YU X H . Optimal pinning controllability of complex networks: dependence on network structure[J]. Physical Review E, 2015, 91 (1): 012803.
doi: 10.1103/PhysRevE.91.012803 |
| 21 | NEWMAN M . Networks: an introduction[M]. Oxford: Oxford University Press, 2018. |
| 22 |
TANG Y Z , HU Y C , CUI J Q , et al. Vision-aided multi-UAV autonomous flocking in GPS-denied environment[J]. IEEE Trans. on Industrial Electronics, 2019, 66 (1): 616- 626.
doi: 10.1109/TIE.2018.2824766 |
| 23 |
LIU Y Y , SLOTINE J J , BARABÁSI A L . Controllability of complex networks[J]. Nature, 2011, 473, 167- 173.
doi: 10.1038/nature10011 |
| 24 |
LIU Y Y , BARABÁSI A L . Control principles of complex networks[J]. Review of Modern Physics, 2016, 88 (3): 035006.
doi: 10.1103/RevModPhys.88.035006 |
| 25 |
SU H S , WANG X F , LIN Z L . Flocking of multi-agents with a virtual leader[J]. IEEE Trans. on Automatic Control, 2009, 54 (2): 293- 307.
doi: 10.1109/TAC.2008.2010897 |
| 26 | GAO J , XU X , NAN D , et al. Flocking motion of multi-agent system by dynamic pinning control[J]. IET Control Theory & Applications, 2017, 11 (5): 714- 722. |
| 27 | CHENG Z S , XIN Y M , CAO J D , et al. Selecting pinning nodes to control complex networked systems[J]. Science China: Technological Sciences, 2018, 61 (10): 111- 119. |
| 28 |
KIA S S , VAN SCOY B , CORTES J , et al. Tutorial on dynamic average consensus: the problem, its applications, and the algorithms[J]. IEEE Control Systems Magazine, 2019, 39 (3): 40- 72.
doi: 10.1109/MCS.2019.2900783 |
| 29 | HORN R A . Topics in matrix analysis[M]. New York: Cambridge Press, 1991. |
| 30 | BERMAN A , PLEMMONS R J . Nonnegative matrices in the mathematical sciences[M]. Philadephia: SIAM Press, 1994. |
| 31 | TIAN G X , HUANG T Z . Inequalities for the minimum eigenvalue of M-matrices[J]. Electronic Journal of Linear Algebra, 2010, 20, 291- 302. |
| 32 |
ZHAO J , SANG C . Several new inequalities for the minimum eigenvalue of M-matrices[J]. Journal of Inequalities and Applications, 2016, 2016 (1): 119.
doi: 10.1186/s13660-016-1062-8 |
| 33 | RUYMBEEK K , MEERBERGEN K , MICHIELS W . Calculating the minimal/maximal eigenvalue of symmetric parameterized matrices using projection[J]. Numerical Linear Algebra with Applications, 2019, 26 (5): e2263. |
| 34 | SHIVAKUMAR P N , WILLIAMS J J , YE Q , et al. On two-sided bounds related to weakly diagonally dominant M-matrices with application to digital circuit dynamics[J]. SIAM Journal on Matrix Analysis & Applications, 1996, 17 (2): 298- 312. |
| 35 |
VICSEK T , CZIRK A , BEN-JACOB E , et al. Novel type of phase transition in a system of self-driven particles[J]. Physical Review Letters, 1995, 75 (6): 1226- 1229.
doi: 10.1103/PhysRevLett.75.1226 |
| 36 | 吴立尧, 韩维, 张勇, 等. 有人/无人机编队指挥控制系统结构设计[J]. 系统工程与电子技术, 2020, 42 (8): 1826- 1834. |
| WU L Y , HAN W , ZHANG Y , et al. Structure design of command and control system for manned/unmanned aerial vehicles formation[J]. Systems Engineering and Electronics, 2020, 42 (8): 1826- 1834. | |
| 37 | 刘锦涛, 吴文海, 李静, 等. 无速度测量的四旋翼无人机机动目标跟踪控制[J]. 系统工程与电子技术, 2017, 39 (2): 369- 375. |
| LIU J T , WU W H , LI J , et al. Moving target tracking control of quadrotor UAVs without velocity measurement[J]. Systems Engineering and Electronics, 2017, 39 (2): 369- 375. |
| [1] | Xuan WANG, Peng DI, Dongliang YIN. Conflict evidence fusion method based on Lance distance and credibility entropy [J]. Systems Engineering and Electronics, 2022, 44(2): 592-602. |
| [2] | Cheng FANG, Wen LU, Jingying JI, Yumeng SONG, Feifei LIANG, Zhiwei LUO. Correlation filter-tracking algorithm based on appearance similarity update [J]. Systems Engineering and Electronics, 2022, 44(1): 117-126. |
| [3] | Zhe LUO, Wanzhen QUAN, Purui ZHANG, Xiaogang YANG. Consensus tracking control for one-side Lipschitz nonlinear multi-agent systems [J]. Systems Engineering and Electronics, 2022, 44(1): 279-284. |
| [4] | Anran FANG, Dan LI, Jianqiu ZHANG. Outlier and unknown observation noise robust Kalman filter [J]. Systems Engineering and Electronics, 2021, 43(3): 593-602. |
| [5] | ZHANG Guo, LI Jun-min. Stabilizing control for discrete-time fuzzy bilinear systems [J]. Journal of Systems Engineering and Electronics, 2009, 31(10): 2440-2444. |
| [6] | LIN Qiong-bin, WANG Wu, YANG Fu-wen, CAI Bi-zhen. Fuzzy dissipative filtering for nonlinear systems with stochastic delay [J]. Journal of Systems Engineering and Electronics, 2009, 31(10): 2434-2439. |
| [7] | MA Ke-yun, YU Li, ZHANG Wen-an. H∞ control approach to congestion control for multi-link network [J]. Journal of Systems Engineering and Electronics, 2009, 31(8): 1930-1934. |
| [8] | DAI Jian-guo, CUI Bao-tong. Absolute stability analysis for the multi-input and multi-output networked control systems [J]. Journal of Systems Engineering and Electronics, 2009, 31(7): 1705-1709. |
| [9] | FU Qin, WANG Bao-hua, YANG Cheng-wu. Robust control for a class of large-scale interconnected nonlinear time-delay systems [J]. Journal of Systems Engineering and Electronics, 2009, 31(7): 1720-1722. |
| [10] | XIAO Min-qing, PENG Qing, CAO Chang-xiu. Reliable robust D-stabilization control of Delta operator systems with actuator failure [J]. Journal of Systems Engineering and Electronics, 2009, 31(6): 1506-1509. |
| [11] | WEN Ji-wei, LIU Fei. Sampled-data controller design for a class of fuzzy jump systems [J]. Journal of Systems Engineering and Electronics, 2009, 31(6): 1415-1419. |
| [12] | DONG Ya-li, FAN Jiao-jiao, YANG Ying-juan. H-infinity robust stabilization for a class of uncertain time-delay nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2009, 31(5): 1167-1171. |
| [13] | DUAN Hong-mei. Robust eigenstructure assignment design in vibration second-order linear systems and its simulation [J]. Journal of Systems Engineering and Electronics, 2009, 31(4): 922-926. |
| [14] | KONG Qing-fu, ZHANG Qing-ling, YANG Chun-yu. State observer design for a class of nonlinear descriptor systems [J]. Journal of Systems Engineering and Electronics, 2009, 31(3): 657-660,718. |
| [15] | WANG Jia, LIN Yu-feng, XING Wei. Guaranteed cost H∞ control with disk pole constraints [J]. Journal of Systems Engineering and Electronics, 2009, 31(3): 666-670. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||