Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (3): 900-907.doi: 10.12305/j.issn.1001-506X.2022.03.22
• Systems Engineering • Previous Articles Next Articles
UAV reconnaissance tactical planning based on colored Petri nets
Yuanyuan ZHANG1,*, Yang GAO1, Peng ZHU1, Jintao LIU2, Shushan GU1
- 1. Trainer Simulation Training Center, The First Training Base, Naval Aviation University, Huludao 125000, China
2. Command and Control Engineering College, Army Engineering University, Nanjing 210042, China
-
Received:2021-02-04Online:2022-03-01Published:2022-03-10 -
Contact:Yuanyuan ZHANG
CLC Number:
Cite this article
Yuanyuan ZHANG, Yang GAO, Peng ZHU, Jintao LIU, Shushan GU. UAV reconnaissance tactical planning based on colored Petri nets[J]. Systems Engineering and Electronics, 2022, 44(3): 900-907.
share this article

Fig.1
Subgoal node structure"
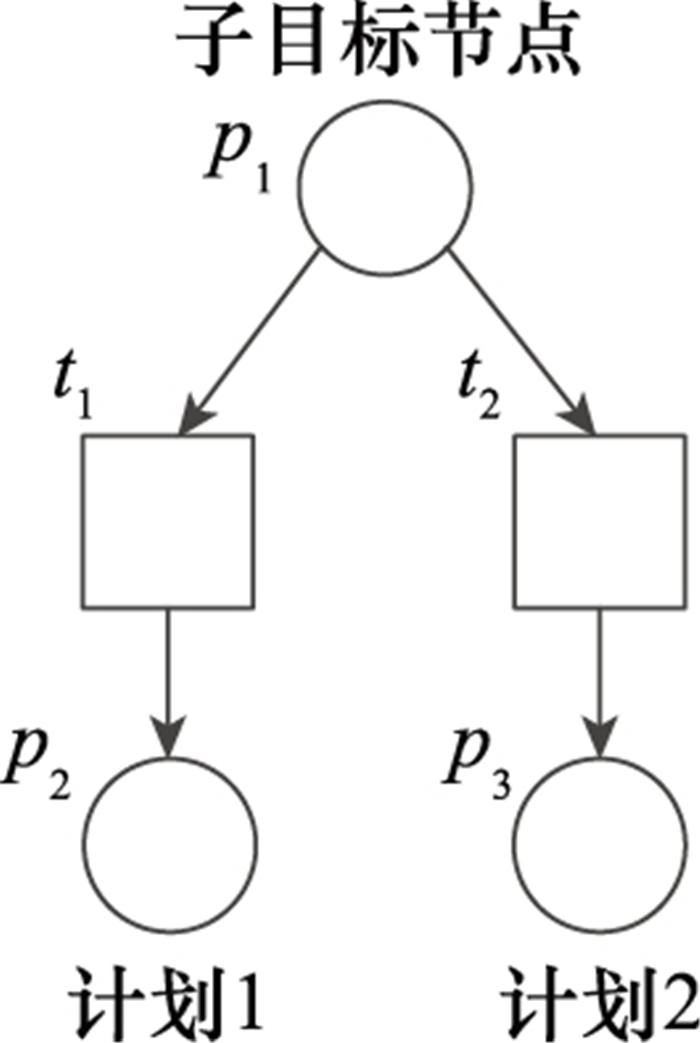
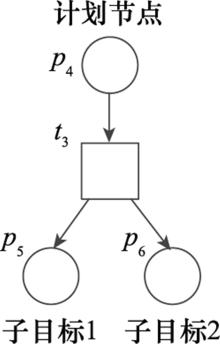
Fig.2
Plan node structure"
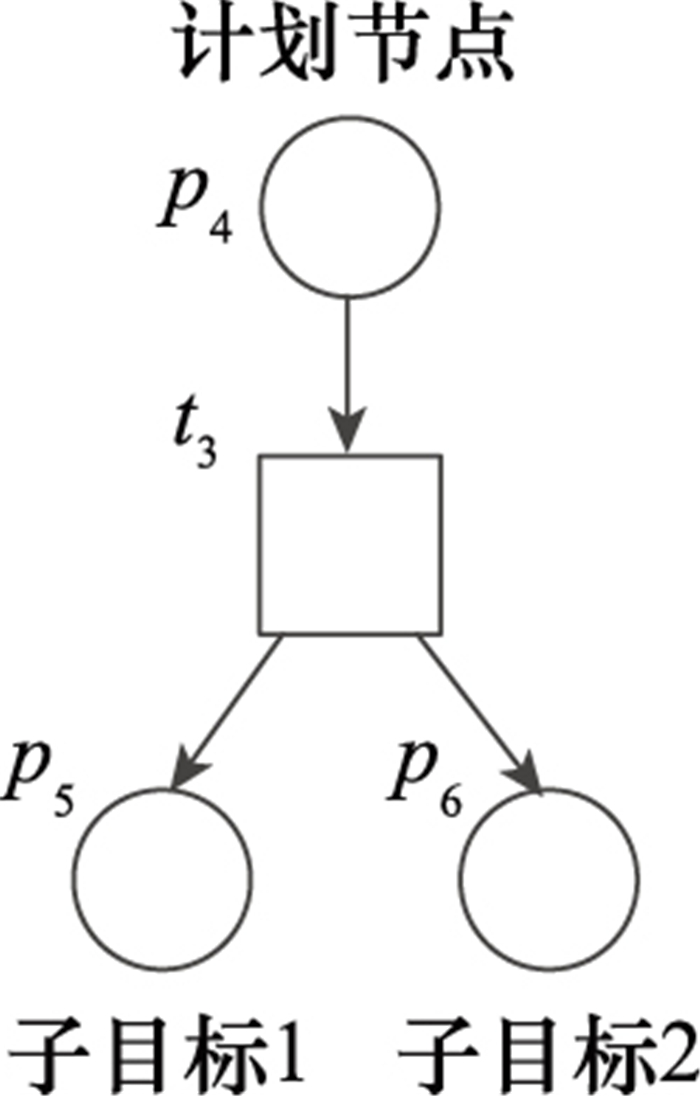
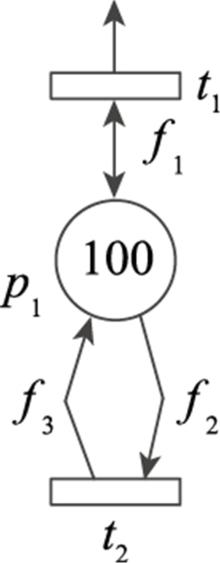
Fig.3
Consumable resources model"

Table 1
Meaning of each element of consumable resources model"
| 元素 | 含义 | 元素 | 含义 | |
| p1 | 资源量 | f1 | q | |
| t1 | 检查余量 | f2 | q | |
| t2 | 消耗资源 | f3 | q-x |

Fig.4
The most optimal plan reasoning structure"
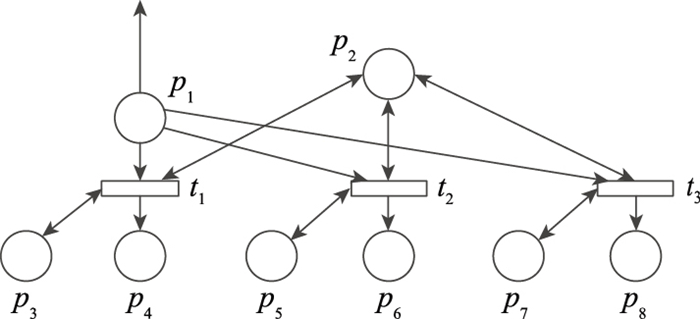
Table 2
Places meanings of the best reasoning structure"
| 库所 | 含义 |
| p1 | 子目标1 |
| p2 | 子目标1资源信息总览 |
| p3 | 计划1资源信息总览 |
| p4 | 计划1 |
| p5 | 计划2资源信息总览 |
| p6 | 计划2 |
| p7 | 计划3资源信息总览 |
| p8 | 计划3 |
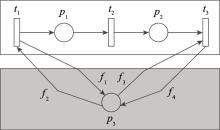
Fig.5
Mission goal reasoning based on resources information summary"
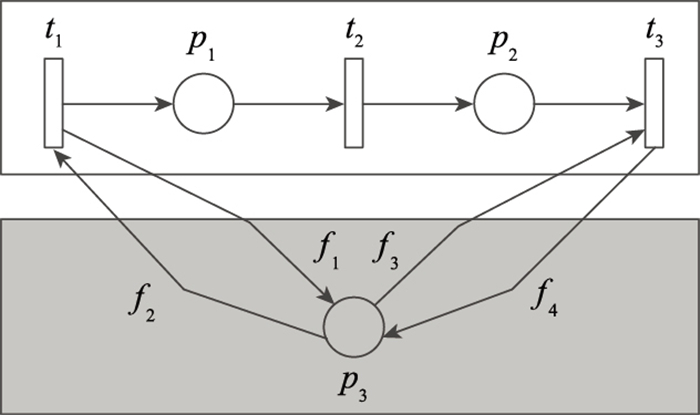
Table 3
Meaning of each element in mission goal reasoning based on resources information summary"
| 元素 | 含义 |
| p1 | 目标序列加入新目标g1 |
| p2 | g1完成 |
| p3 | 新目标g1资源信息总览 |
| t1 | 更新资源信息总览 |
| t2 | 开始执行新目标g1 |
| t3 | 更新资源信息总览 |
| f1 | Rnew |
| f2 | Rold |
| f3 | Rold |
| f4 | Rnew |
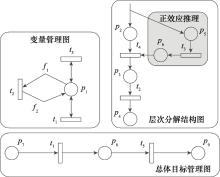
Fig.6
Positive effect reasoning model"
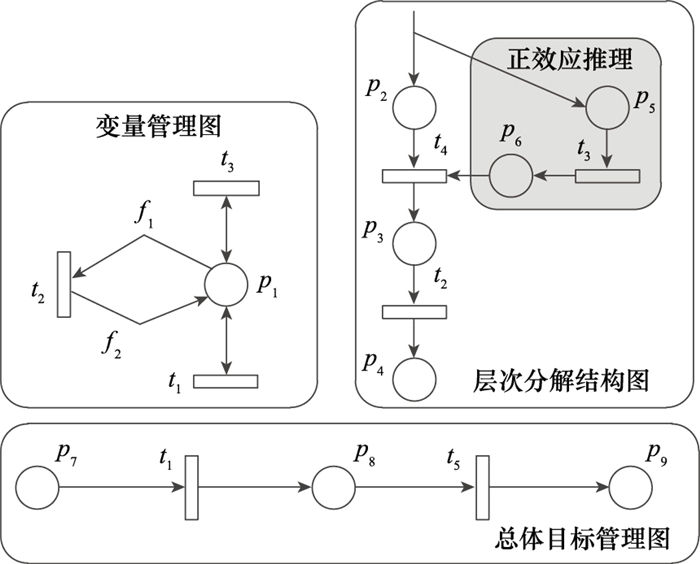
Table 4
Meaning of each element in positive effect reasoning model"
| 元素 | 含义 | 元素 | 含义 | |
| p1 | 目标变量v1 | p8 | 已完成目标列表 | |
| p2 | 子目标g1 | p9 | 总目标完成 | |
| p3 | 计划 | t1 | 检查目标变量 | |
| p4 | 子目标1完成 | t2 | 设置目标变量 | |
| p5 | 开始推理 | t3 | 检查目标变量 | |
| p6 | 目标未实现 | t4 | 开始执行计划 | |
| p7 | 未完成目标列表 | t5 | 判断已完成目标值 | |
| - | - |

Fig.7
Negative effect reasoning model"
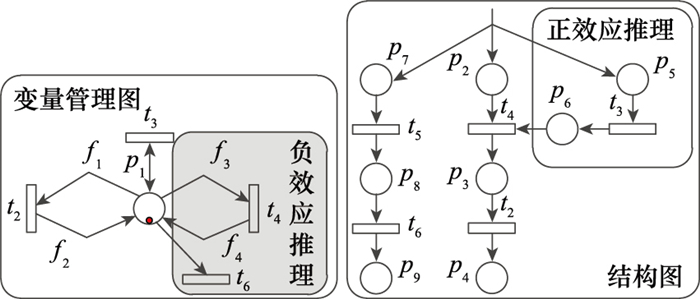
Table 5
Meaning of each element in negative effect reasoning model"
| 元素 | 含义 | 元素 | 含义 | |
| p7 | 子目标g1 | t4 | 开始执行计划、检查并设置保护托肯 | |
| p8 | 计划 | t5 | 开始执行计划 | |
| p9 | 子目标2完成 | t6 | 设置目标变量、设置保护托肯 |
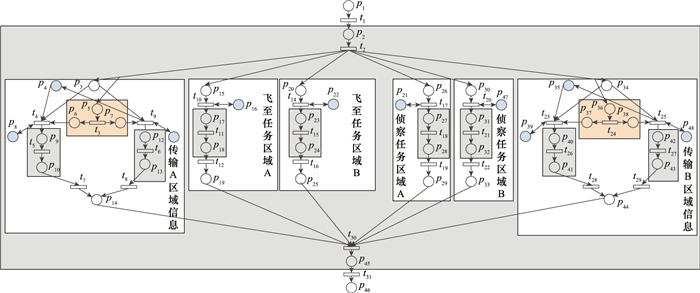
Table 6
Meanings of some elements"
| 元素 | 含义 |
| p1 | 侦察任务目标开始 |
| p2 | 侦察计划开始 |
| p3, p34 | 传输A域信息子目标 |
| p4, p35 | 传输A域信息资源总览 |
| p5, p36 | 正效应推理 |
| p6, p7, p37, p38 | 目标未实现 |
| p8 | 传输A域信息计划1资源总览 |
| p9 | 传输A域信息计划1开始 |
| p10 | 传输A域信息计划1实现 |
| p11 | 传输A域信息计划2资源总览 |
| p12 | 传输A域信息计划2开始 |
| p13 | 传输A域信息计划2实现 |
| p14 | 传输A域信息子目标完成 |
| p15(p20) | 飞至A(B)地子目标 |
| p16(p22) | 飞至A(B)地计划资源总览 |
| p17(p23) | 飞至A(B)地计划开始 |
| p18(p24) | 飞至A(B)地计划实现 |
| p19(p25) | 飞至A(B)地子目标完成 |
| p26(p30) | 侦察A(B)地子目标 |
| p21(p47) | 侦察A(B)地计划资源总览 |
| p27(p31) | 侦察A(B)地计划起始 |
| p28(p32) | 侦察A(B)地计划完成 |
| p29(p33) | 侦察A(B)地目标完成 |
| p45 | 侦察计划完成 |
| p46 | 侦察任务目标完成 |
| p47 | 待完成子目标库所 |
| p48 | 执行序列加入新目标 |
| p49 | 某子目标完成 |
| p50 | 已完成子目标 |
| p51 | 全部子目标完成 |
| p52 | 燃油总量 |
| p53 | 位置 |
| t2 | 侦察计划的子目标分解 |
| t3, t24 | 检查目标变量 |
| t5, t6, t26, t27, t11, t15, t18, t21 | 相关计划行动序列 |
| t32 | 与t4, t9, t10, t14, t17, t20, t23, t25关联, 同时更新资源信息总览, 并对待保护变量库所加入保护托肯 |
| t33 | 更新资源信息总览 |
| t35 | 判断子目标是否全部完成 |
| t37 | 与t11, t15, t27, t18, t21, t6关联 |
| t38, t42 | 与t3, t24关联 |
| t40 | 与t19关联 |
| t41 | 与t11, t15, t5, t26关联 |
| t44 | 与t22关联 |

Fig.8
General goals management graph of reconnaissance mission"

Fig.9
Variables management graph of reconnaissance mission"
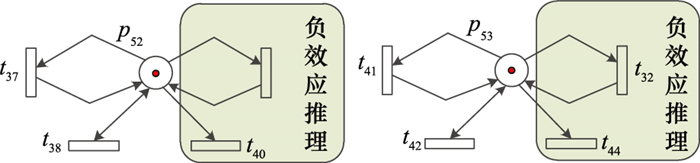

Fig.10
Hierarchical decomposition graph of reconnaissance mission"
| 1 |
朱剑佑. 无人机任务规划研究[J]. 无线电工程, 2007, (12): 56- 58.
doi: 10.3969/j.issn.1003-3106.2007.12.019 |
|
ZHU J Y . Research on unmanned aerial vehicle mission planning[J]. Radio Engineering, 2007, (12): 56- 58.
doi: 10.3969/j.issn.1003-3106.2007.12.019 |
|
| 2 | 沈林成, 陈璟, 王楠. 飞行器任务规划技术综述[J]. 航空学报, 2014, 35 (3): 593- 606. |
| SHEN L C , CHEN J , WANG N . Overview of air vehicle mission planning techniques[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35 (3): 593- 606. | |
| 3 | PASHNA M , YUSOF R , ISMAIL Z H , et al. Autonomous multi-robot tracking system for oil spills on sea surface based on hybrid fuzzy distribution and potential field approach[J]. Ocean Engineering, 2020, 207 (6): 107238. |
| 4 |
BATISTA J , SOUZA D , SILVA J , et al. Trajectory planning using artificial potential fields with metaheuristics[J]. IEEE Latin America Transactions, 2020, 18 (5): 914- 922.
doi: 10.1109/TLA.2020.9082920 |
| 5 | KUMAR P B , RAWAT H , PARHI D R . Path planning of humanoids based on artificial potential field method in unknown environments[J]. Expert Systems, 2019, 36 (1): e12360. |
| 6 | SANG H Q , YOU Y S , SUN X J , et al. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations[J]. Ocean Engineering, 2021, 223 (4): 108709. |
| 7 |
GIBSON J , SCHULER T , MCGUIRE L , et al. Swarm and multi-agent time-based A* path planning for LTA3 systems[J]. Unmanned Systems, 2020, 8 (3): 253- 260.
doi: 10.1142/S2301385020500181 |
| 8 |
THORESEN M , NIELSEN N H , MATHIASSEN K , et al. Path planning for ugvs based on traversability hybrid A*[J]. IEEE Robotics and Automation Letters, 2021, 6 (2): 1216- 1223.
doi: 10.1109/LRA.2021.3056028 |
| 9 | XIONG C K , LU D , ZENG Z , et al. Path planning of multiple unmanned marine vehicles for adaptive ocean sampling using elite group-based evolutionary algorithms[J]. Journal of Intelligent & Robotic Systems, 2020, 99 (3): 875- 889. |
| 10 |
LIN B L , ZHAO Y N , LIN R X , et al. Integrating traffic routing optimization and train formation plan using simulated annealing algorithm[J]. Applied Mathematical Modelling, 2021, 93, 811- 830.
doi: 10.1016/j.apm.2020.12.031 |
| 11 | ASIF R, LOFFEL H, ASSAVASANG V, et al. Aerial path planning for multi-vehicles[C]//Proc. of the IEEE 2nd International Conference on Artificial Intelligence and Knowledge Engineering, 2019: 97-99. |
| 12 |
HERTZ A , RIDREMONT T . A tabu search for the design of capacitated rooted survivable planar networks[J]. Journal of Heuristics, 2020, 26 (6): 829- 850.
doi: 10.1007/s10732-020-09453-x |
| 13 | ZHENG J G , MI X M , LIAO H C . Advanced planning and scheduling based on the constraint theory and improved tabu search algorithm[J]. Recent Patents on Engineering, 2020, 13 (2): 546- 549. |
| 14 | CHÂARI I , KOUBÂA A , BENNACEUR H , et al. On the ade- quacy of tabu search for global robot path planning problem in grid environments[J]. Procedia Computer Science, 2014, 32 (1): 604- 613. |
| 15 | TRAN N H , NGUYEN A D , NGUYEN T N . A genetic algorithm application in planning path using b-spline model for autonomous underwater vehicle (AUV)[J]. Applied Mechanics and Materials, 2020, 902 (1): 54- 64. |
| 16 | LIN L H , WU C Z , MA L . A genetic algorithm for the fuzzy shortest path problem in a fuzzy network[J]. Complex & Intelligent Systems, 2020, 7 (3): 225- 234. |
| 17 | RATH A K , PARHI D R , DAS H C , et al. Path optimization for navigation of a humanoid robot using hybridized fuzzy-genetic algorithm[J]. International Journal of Intelligent Unmanned Systems, 2019, 7 (1): 77- 79. |
| 18 |
SHI L , XU S K . UAV path planning with qos constraint in device-to-device 5G networks using particle swarm optimization[J]. IEEE Access, 2020, 8, 137884- 137896.
doi: 10.1109/ACCESS.2020.3010281 |
| 19 | SHAO S K , YU P , HE C L , et al. Efficient path planning for UAV formation via comprehensively improved particle swarm optimization[J]. ISA Transactions, 2020, 97 (2): 415- 430. |
| 20 | KUMAR P B , PARHI D R , SAHU C . An approach to optimize the path of humanoid robots using a hybridized regression-adaptive particle swarm optimization-adaptive ant colony optimization method[J]. Industrial Robot, 2019, 46 (1): 5- 10. |
| 21 |
CHEN Y Q , GUO J L , YANG H , et al. Research on navigation of bidirectional A* algorithm based on ant colony algorithm[J]. The Journal of Supercomputing, 2021, 77 (1): 23- 27.
doi: 10.1007/s11227-020-03258-2 |
| 22 |
DAI Y , ZHAO M . Manipulator path-planning avoiding obstacle based on screw theory and ant colony algorithm[J]. Journal of Computational and Theoretical Nanoscience, 2016, 13 (1): 922- 927.
doi: 10.1166/jctn.2016.4894 |
| 23 | MOUHCINE E, KHALIFA M, MOHAMED Y. Route optimization for school bus scheduling problem based on a distributed ant colony system algorithm[C]//Proc. of the IEEE International Conference on Intelligent Systems and Computer, 2017. |
| 24 | JENSEN K . Coloured petri nets[M]. Berlin: Springer Berlin Heidelberg, 1987: 249- 299. |
| 25 | JENSEN K . Coloured Petri nets: basic concepts[M]. Berlin: Springer Berlin Heidelberg, 1992: 23- 50. |
| 26 | THANGARAJAH J, WINIKOFF M, LIN P, et al. Avoiding resource conflicts in intelligent agents[C]//Proc. of the 15th European Conference on Artifical Intelligence, 2002: 18-22. |
| 27 | THANGARAJAH J, PADGHAM L. An empirical evaluation of reasoning about resource conflicts[C]//Proc. of the 3rd International Joint Conference on Autonomous Agents and Multiagent Systems, 2004: 1298-1299. |
| 28 | THANGARAJAH J, PADGHAM L, WINIKOFF M. Detecting & exploiting positive goal interaction in intelligent agents[C]//Proc. of the International Joint Conference on Autonomous Agents & Multiagent Systems, 2003: 401-408. |
| 29 | VISSER S , THANGARAJAH J , HARLAND J , et al. Prefe-rence-based reasoning in BDI agent systems[J]. Autonomous Agents and Multi-Agent Systems, 2015, 30 (2): 291- 330. |
| 30 |
THANGARAJAH J , LIN P . Computationally effective reaso-ning about goal interactions[J]. Journal of Automated Reaso-ning, 2011, 47 (1): 17- 56.
doi: 10.1007/s10817-010-9175-0 |
| [1] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [2] | Jing YU, Enmi YONG, Hanyang CHEN, Dong HAO, Xiancai ZHANG. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack [J]. Systems Engineering and Electronics, 2022, 44(9): 2849-2857. |
| [3] | Jianfeng YANG, Heye XIAO, Liang LI, Junqiang BAI, Weihao DONG. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism [J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. |
| [4] | Bozhi DONG, Jiang ZHU, Haibo ZHANG. SCMA-based energy efficiency resource allocation scheme in amplify-forward relay system [J]. Systems Engineering and Electronics, 2022, 44(6): 2035-2042. |
| [5] | Hong ZOU, Chenyang BAI, Peng HE, Yaping CUI, Ruyan WANG, Dapeng WU. Edge service placement strategy based on distributed deep learning [J]. Systems Engineering and Electronics, 2022, 44(5): 1728-1737. |
| [6] | Yuanjie LU, Zhimin LIU, Zhixiao SUN, Dong KAN. Model-based integrated evaluation of UAV system architecture [J]. Systems Engineering and Electronics, 2022, 44(4): 1239-1245. |
| [7] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [8] | Shanxue CHEN, Shengjin WU, Bowen GU. Energy efficiency optimization algorithm for uplink NOMA systems with time reversal [J]. Systems Engineering and Electronics, 2022, 44(3): 1007-1013. |
| [9] | Xueyong YU, Ye ZHU, Lixiang QIU, Hongbo ZHU. Energy efficient offloading strategy for UAV aided edgecomputing systems [J]. Systems Engineering and Electronics, 2022, 44(3): 1022-1029. |
| [10] | Xingjia YANG, Keqing DUAN, Xiang LI, Wei QI. Resolving range ambiguity for cooperative detection using UAV swarms [J]. Systems Engineering and Electronics, 2022, 44(2): 480-489. |
| [11] | Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance [J]. Systems Engineering and Electronics, 2022, 44(2): 529-537. |
| [12] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [13] | Buhua LIU, Dan DING, Liu YANG, Naiyang XUE, Zhongqian LIU. OFDM data transmission technology of UAV based on deep neural network [J]. Systems Engineering and Electronics, 2022, 44(2): 696-702. |
| [14] | Zhipeng WU, Ping ZHANG, Zhen LI, Lei HUANG, Chang LIU, Shuo GAO. Vegetation height inversion method based on light-weighted and small UAV-radar [J]. Systems Engineering and Electronics, 2022, 44(12): 3667-3675. |
| [15] | Yujia WANG, Wei FANG, Tao XU, Yingfu YU, Boyuan DENG. Intelligent decision-making model by unmanned aerial vehicles in sea-to-air confrontation based on genetic fuzzy trees [J]. Systems Engineering and Electronics, 2022, 44(12): 3756-3765. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||