Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (12): 3792-3799.doi: 10.12305/j.issn.1001-506X.2022.12.24
• Guidance, Navigation and Control • Previous Articles Next Articles
Design of quadrotor attitude active disturbance rejection controller based on improved ESO
Wenqi YANG1,*, Jianhua LU1, Xu JIANG1, Yuanxin WANG2
- 1. School of Basic Sciences for Aviation, Naval Aviation University, Yantai 264000, China
2. Campus of Qingdao, Naval Aviation University, Qingdao 266000, China
-
Received:2021-06-11Online:2022-11-14Published:2022-11-24 -
Contact:Wenqi YANG
CLC Number:
Cite this article
Wenqi YANG, Jianhua LU, Xu JIANG, Yuanxin WANG. Design of quadrotor attitude active disturbance rejection controller based on improved ESO[J]. Systems Engineering and Electronics, 2022, 44(12): 3792-3799.
share this article
Table 1
Simulation parameters numerical table of quadrotor UAV"
| 符号 | 物理含义 | 数值 |
| m/kg | 机体质量 | 1.4 |
| d/m | 旋翼质心到中心距离 | 0.225 |
| g/(m·s-1) | 重力加速度 | 9.8 |
| kT/(N·s-2) | 升力系数 | 1.105e-05 |
| kM/(N·m·s-2) | 反扭力矩系数 | 1.779e-07 |
| Ix/(kg·m2) | x轴转动惯量 | 0.021 1 |
| Iy/(kg·m2) | y轴转动惯量 | 0.021 9 |
| Iz/(kg·m2) | z轴转动惯量 | 0.036 6 |
| JT/(kg·m2) | 旋翼转动惯量 | 1.287e-04 |

Fig.1
Basic structure of ADRC"
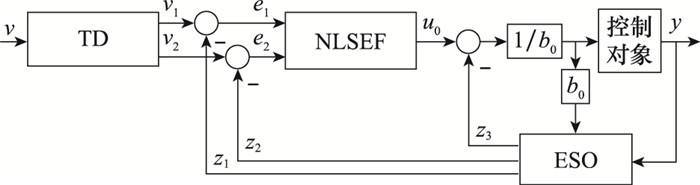
Fig.2
Response curve without noise interference"
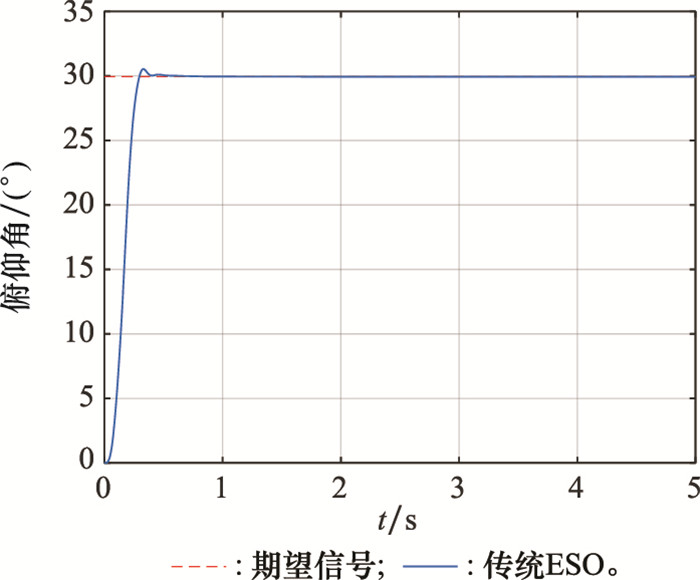
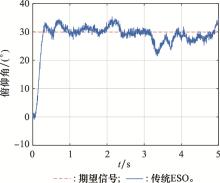
Fig.3
Response curve with noise interference"

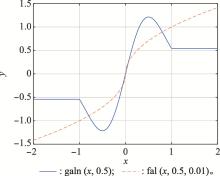
Fig.4
Comparison diagram of function curve simulation"
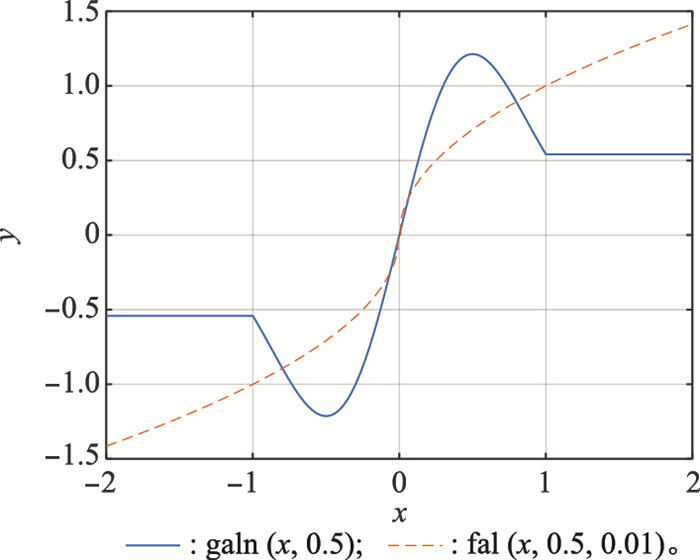
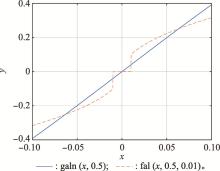
Fig.5
Enlargement of the function curve origin"
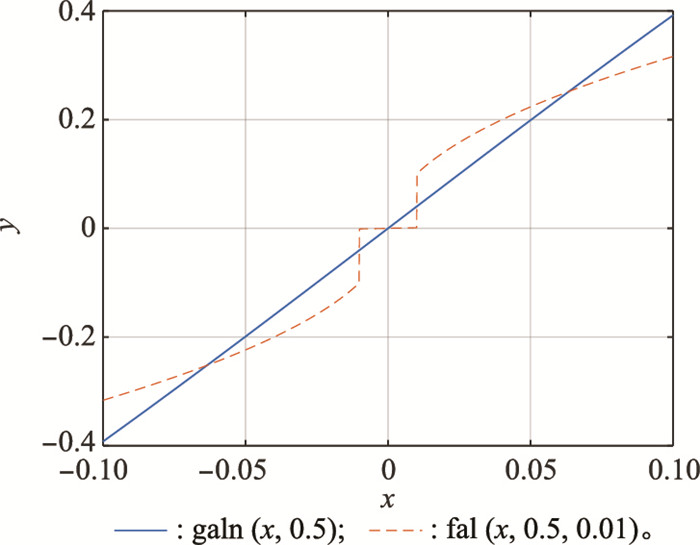
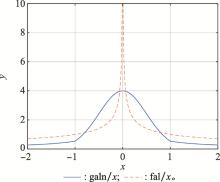
Fig.6
Gain diagram of function curve error"
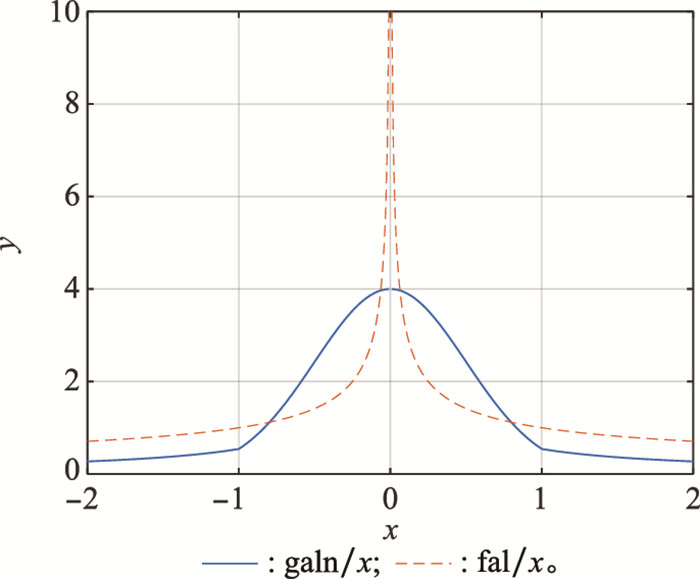
Table 2
ADRC parameters"
| 控制器模块 | 参数符号 | 俯仰通道 |
| TD | r0 | 20 |
| h0 | 0.004 | |
| ESO | β1 | 250 |
| β2 | 2 000 | |
| β3 | 3 000 | |
| σ1 | 0.5 | |
| σ2 | 0.25 | |
| NLSEF | h1 | 5 |
| b | 47.4 | |
| r1 | 200 | |
| c | 5 |
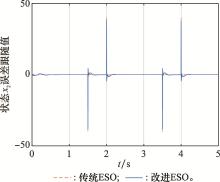
Fig.7
Follow-up error value of x2 state"
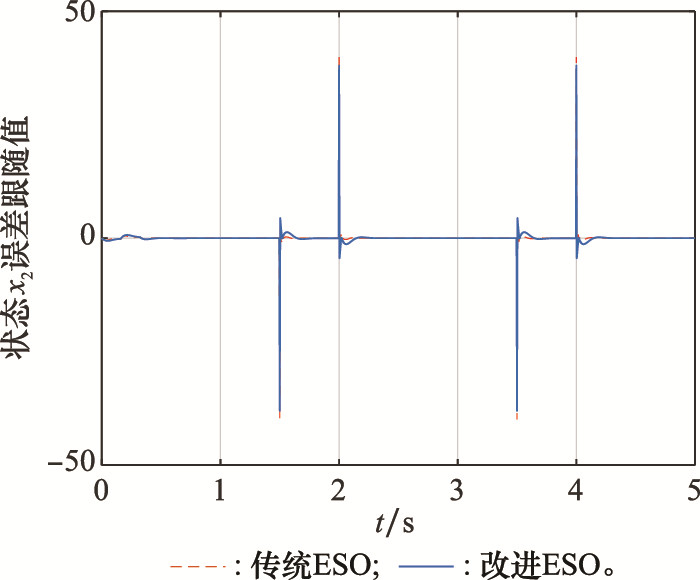
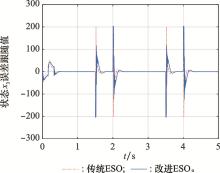
Fig.8
Follow-up error value of x3 state"
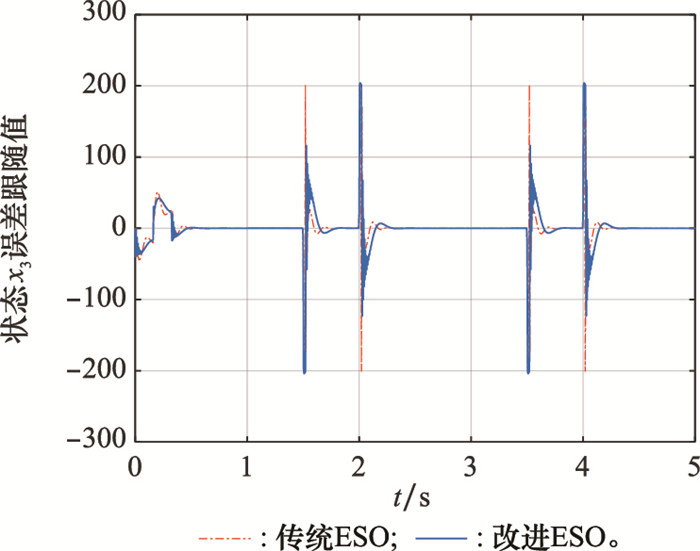
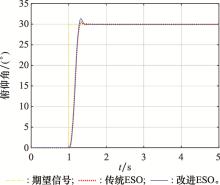
Fig.9
Instruction tracking curve without noise interference"

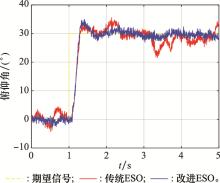
Fig.10
Instruction tracking curve with noise interference"
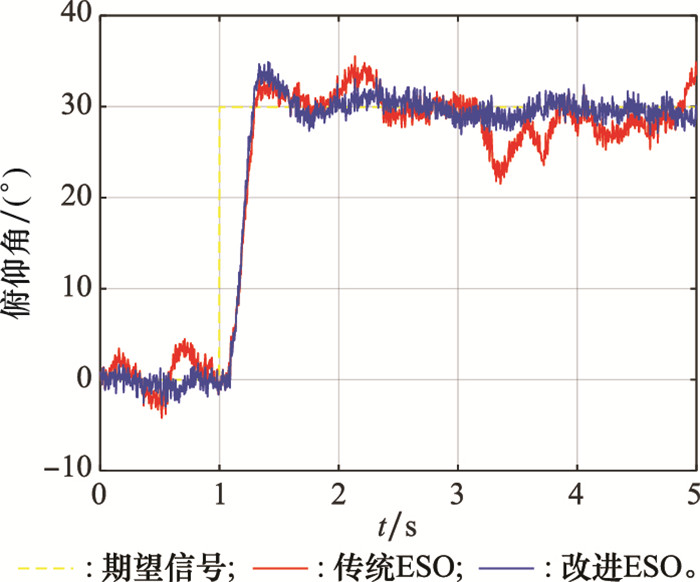
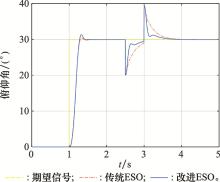
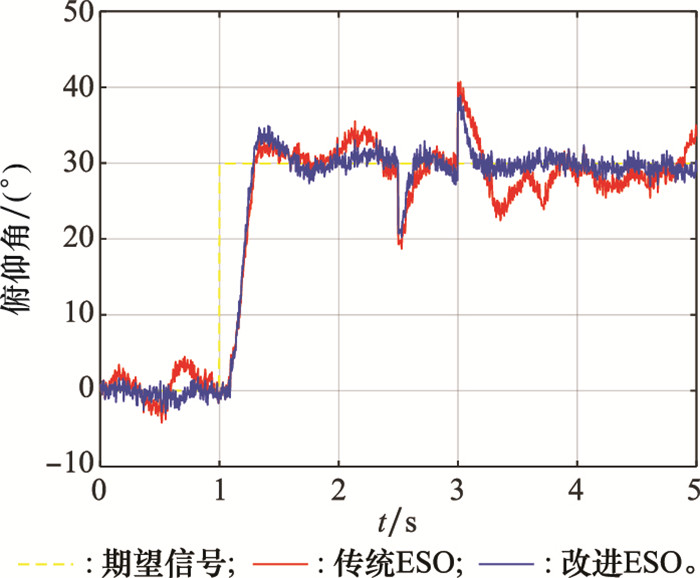
Fig.11
Wind disturbance response curve without noise interference"

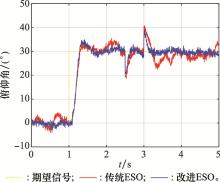
Fig.12
Wind disturbance response curve with noise interference"
| 1 |
WETZ T , WILDMANN N , BEYRICH F . Distributed wind measurements with multiple quadrotor unmanned aerial vehicles in the atmospheric boundary layer[J]. Atmospheric Measurement Techniques, 2021, 14 (5): 3795- 3814.
doi: 10.5194/amt-14-3795-2021 |
| 2 | PEDRO S , TOMÁS D , VALE J L D , et al. Design and performance quantification of VTOL systems for a canard aircraft[J]. Aeronautical Journal-New Series-, 2021, 125 (1292): 1- 24. |
| 3 |
LEE D . A linear acceleration control for precise trajectory tracking flights of a quadrotor UAV under high-wind environments[J]. International Journal of Aeronautical and Space Sciences, 2021, 22, 898- 910.
doi: 10.1007/s42405-021-00366-y |
| 4 |
HAN J Q . From PID technique to active disturbances rejection control[J]. IEEE Trans.on Industrial Electronics, 2009, 56 (3): 900- 906.
doi: 10.1109/TIE.2008.2011621 |
| 5 | CHANG K , XIA Y Q , HUANG K L , et al. Obstacle avoidance and active disturbance rejection control for a quadrotor[J]. Neurocomputing, 2016, 190 (19): 60- 69. |
| 6 | ZHANG J Y , YU C M , YE J X . Trajectory tracking control for quadrotor UAV based on extended state observer and backstepping sliding mode[J]. Journal of Computer Applications, 2018, 38 (9): 2742- 2746. |
| 7 | ZHANG J H , CHEN D D , SHEN G H , et al. Disturbance observer based adaptive fuzzy sliding mode control: a dynamic sliding surface approach[J]. Automatica, 2021, 129 (1): 109606. |
| 8 | JI Y D, YAO Y, ZHANG W J, et al. Attitude control of a quadrotor unmanned aerial vehicle based on linear extended state observer[C]//Proc. of the IEEE 27th Chinese Control and Decision Conference, 2015: 1534-1595. |
| 9 | 张婷. 基于ADRC的四旋翼飞行控制器设计[D]. 沈阳: 东北大学, 2013. |
| ZHANG T. Design of quadrotor flight controller based on ADRC[D]. Shenyang: Northeastern University, 2013. | |
| 10 | 窦景欣, 孔祥希, 闻邦椿. 四旋翼姿态的反步滑模自抗扰控制及稳定性[J]. 东北大学学报(自然科学版), 2016, 37 (10): 1415- 1420. |
| DOU J X , KONG X X , WEN B C . Backstepping sliding mode active disturbance rejection control and stability of quadrotor attitude[J]. Journal of Northeastern University (Natural Science), 2016, 37 (10): 1415- 1420. | |
| 11 | CHANG K , MA D L , LI T Y , et al. Active disturbance rejection and predictive control strategy for a quadrotor helicopter[J]. IET Control Theory & Applications, 2016, 10 (17): 2213- 2222. |
| 12 | 万慧, 齐晓慧, 李杰, 等. 基于SADRC的四旋翼飞行器姿态解耦控制方法[J]. 火力与指挥控制, 2020, 45 (4): 83- 88. |
| WAN H , QI X H , LI J , et al. Attitude decoupling control method of quadrotor aircraft based on SADRC[J]. Fire Control & Command Control, 2020, 45 (4): 83- 88. | |
| 13 | 刘宝莹, 李明秋, 杨俊威. 基于改进型自抗扰的四旋翼飞行器姿态控制[J]. 指挥控制与仿真, 2021, 43 (2): 98- 102. |
| LIU B Y , LI M Q , YANG J W . Attitude control of quadrotor aircraft based on improved active disturbance rejection[J]. Command control and simulation, 2021, 43 (2): 98- 102. | |
| 14 | 陈志旺, 张子振, 曹玉洁. 自抗扰fal函数改进及在四旋翼姿态控制中的应用[J]. 控制与决策, 2018, 33 (10): 1901- 1907. |
| CHEN Z W , ZHANG Z Z , CAO Y J . Improvement of active disturbance rejection fal function and its application in attitude control of quadrotor[J]. Control and Decision, 2018, 33 (10): 1901- 1907. | |
| 15 | ZHANG M G, LIU Z, LI H M, et al. Leader-follower formation control of unmanned aerial vehicles based on active disturbances rejection control[C]//Proc. of the 4th International Conference on Automation, Control and Robitcs Engineering, 2019. |
| 16 | LI X Y, AI W, TIAN S P. ADRC with feedfoward control for time-delay systems[C]//Proc. of the IEEE 7th Data Driven Control and Learning Systems Conference, 2018. |
| 17 | ZHOU W , WANG X P , WANG X G , et al. Design of sliding mode controller for tilting quadrotor UAV based on predetermined performance[J]. Journal of Physics: Conference Series, 2021, 1748 (6): 62- 74. |
| 18 | CHEN Z Y, XU B. Control simulation and anti-jamming verification of quadrotor UAV Based on Matlab[C]//Proc. of the 5th International Conference on Intelligent Informatics and Biome-dical Sciences, 2020. |
| 19 | ZHENG T H, FENG Z P, ZHAO S, et al. Experimental study of ADRC based heading control of underwater flight vehicles[C]//Proc. of the IEEE International Conference on Control, Automation and Information Sciences, 2018. |
| 20 | LIANG H B, XU Y, YU X. ADRC vs LADRC for quadrotor UAV with wind disturbances[C]//Proc. of the IEEE Chinese Control Conference, 2019. |
| 21 | XIA G Y, LIU Z H. Quadrotor unmanned helicopter attitude control based on improved ADRC[C]//Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2014. |
| 22 | DAI J Y, HU F, YING J, et al. Research on attitude control algorithm based on improved linear active disturbance rejection control for unmanned helicopter[C]//Proc. of the IEEE Chinese Control and Decision Conference, 2019. |
| 23 | RONG Y F, JIAO R, SONG K, et al. Sigmoid super-twisting extended state observer and sliding mode controller for quadrotor UAV attitude system with unknown disturbance[C]//Proc. of the IEEE International Conference on Robotics and Biomimetics, 2019. |
| 24 | 李毅, 陈增强, 孙明玮, 等. 离散型自抗扰控制器在四旋翼飞行姿态控制中的应用[J]. 控制理论与应用, 2015, 32 (11): 1470- 1477. |
| LI Y , CHEN Z Q , SUN M W , et al. Application of discrete active disturbance rejection controller in flight attitude control of quadrotor[J]. Control Theory and Applications, 2015, 32 (11): 1470- 1477. | |
| 25 | ZHANG Y W, YANG L, ZHU Y. Estimate error analysis of the nonlinear third order extended state observer[C]//Proc. of the IEEE Intelligent Control & Automation, 2012. |
| 26 | WANG Y H , YAO Y , MA K M . Analysis and application of Fal function filter[J]. Electric Machines and Control, 2010, 14 (11): 88- 91. |
| 27 | 于洪国, 康忠健, 陈瑶. 基于双曲正切函数的二阶时变参数扩张状态观测器[J]. 控制理论与应用, 2016, 33 (4): 530- 534. |
| YU H G , KANG Z J , CHEN Y . Second order extended state observer based on hyperbolic tangent function[J]. Control Theory and Applications, 2016, 33 (4): 530- 534. | |
| 28 | ZHANG X J, LU X H. Yaw robust control of UAV based on linear auto-disturbance rejection compensation[C]//Proc. of the IEEE 3rd International Conference on Mechanical, Control and Computer Engineering, 2018. |
| 29 | OROZCO-SOTO S M, IBARRA-ZANNATHA J M, MALO-TAMAYO A J, et al. Active disturbance rejection control for UAV hover using ROS[C]//Proc. of the IEEE Congreso Mexicano de Robótica, 2019. |
| 30 | PAWAR S N , CHILE R H , PATRE B M . Extended state observer based robust sliding mode control for fourth order nonlinear systems with experimental validation[J]. International Journal of Dynamics and Control, 2021, 9 (12): 1600- 1611. |
| 31 | LOZGACHEV G I . On a method of construction of Lyapunov functions[J]. Automation and Remote Control, 1998, 59 (10): 1365- 1368. |
| 32 | 刘一莎, 杨晟萱, 王伟. 四旋翼飞行器的自抗扰飞行控制方法[J]. 控制理论与应用, 2015, 32 (10): 1351- 1360. |
| LIU Y S , YANG S X , WANG W . Active disturbance rejection flight control method for quadrotor aircraft[J]. Control Theory and Applications, 2015, 32 (10): 1351- 1360. |
| [1] | Jiahui GUO, Binan JIANG, Zonghao TIAN. Guidance law design of guided projectile with impact angle and field-of-view constraints [J]. Systems Engineering and Electronics, 2021, 43(4): 1050-1056. |
| [2] | Shiyan SUN, Shang JIANG, Fuqing TIAN, Weige LIANG. Distributed adaptive cooperative guidance law of multiple projectiles with multiple constraints [J]. Systems Engineering and Electronics, 2021, 43(1): 181-190. |
| [3] | Xun GONG, Yunbo FU, Liangxu JIANG, Ce CAO, Tongjian GUO. Application of super-twisting extended state observer in fault reconfiguration of quadrotor aircraft [J]. Systems Engineering and Electronics, 2020, 42(9): 2077-2084. |
| [4] | DENG Yingjie, ZHANG Xianku, ZHANG Guoqing. Dynamic positioning system of marine surface vessel with ESO and input saturation control [J]. Systems Engineering and Electronics, 2019, 41(5): 1110-1117. |
| [5] | WANG Qing, LIU Yu’ang, LIU Chen, DONG Chaoyang. Anti-windup control for morphing wings based on ESO [J]. Systems Engineering and Electronics, 2019, 41(3): 619-625. |
| [6] | JIANG Shang, TIAN Fuqing, SUN Shiyan, LIANG Weige, YOU Dong. Fuzzy adaptive dynamic surface terminal guidance law considering autopilot lag and impact angle constraints [J]. Systems Engineering and Electronics, 2019, 41(2): 389-401. |
| [7] | LI Jiong, ZHANG Tao, LEI Humin, YE Jikun, WANG Huaji. Nonsingular fast terminal second order sliding mode guidance law with finite time convergence [J]. Systems Engineering and Electronics, 2018, 40(4): 860-867. |
| [8] | SHEN Zhipeng, CAO Xiaoming. Extended state observer based dynamic surface output feedback control for quadrotor UAV trajectory tracking with input constraints#br# [J]. Systems Engineering and Electronics, 2018, 40(12): 2766-2774. |
| [9] | XIA Weixing, YANG Xiaodong. ESO estimation algorithm for gyro drift of INS [J]. Systems Engineering and Electronics, 2018, 40(12): 2804-2809. |
| [10] | XIA Chuan, DONG Chaoyang, WANG Qing, CHENG Haoyu. Adaptive integrated guidance and control backstepping sliding mode design for blended control missile#br# [J]. Systems Engineering and Electronics, 2018, 40(10): 2325-2333. |
| [11] | SONG Jiangpeng, ZHOU Di, SUN Guangli. Adaptive robust control for mirror platform based on extended state observer [J]. Systems Engineering and Electronics, 2017, 39(4): 876-882. |
| [12] | SHI Xiaoping, BI Xianting, YANG Jing. Spacecraft timedelay state feedback control based on extended state observer [J]. Systems Engineering and Electronics, 2016, 38(3): 624-628. |
| [13] | CHENG Hao-yu, DONG Chao-yang, WANG Qing. Disturbance rejection fractional order controller design for launch vehicle [J]. Systems Engineering and Electronics, 2015, 37(9): 2109-2114. |
| [14] | CHENG Chun-hua, HU Yun-an, WU Jin-hua, XIAO Zhi-cai. Track control of system with uncertainty and non-affine inputs [J]. Systems Engineering and Electronics, 2014, 36(2): 354-360. |
| [15] | DONG Feiyao, LEI Humin, SHAO Lei, ZHANG Jinpeng. Design of control system for missile longitudinal plane based on extended state observer [J]. Journal of Systems Engineering and Electronics, 2012, 34(1): 125-128. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||