Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (6): 1651-1658.doi: 10.12305/j.issn.1001-506X.2021.06.23
• Guidance, Navigation and Control • Previous Articles Next Articles
Real time prediction of maneuver trajectory for AdaBoost-PSO-LSTM network
Lei XIE*, Dali DING, Zhenglei WEI, Andi TANG, Peng ZHANG
- Aeronautics Engineering College, Air Force Engineering University, Xi'an 710038, China
-
Received:2020-09-30Online:2021-05-21Published:2021-05-28 -
Contact:Lei XIE
CLC Number:
Cite this article
Lei XIE, Dali DING, Zhenglei WEI, Andi TANG, Peng ZHANG. Real time prediction of maneuver trajectory for AdaBoost-PSO-LSTM network[J]. Systems Engineering and Electronics, 2021, 43(6): 1651-1658.
share this article

Fig.1
RNN structure diagram"
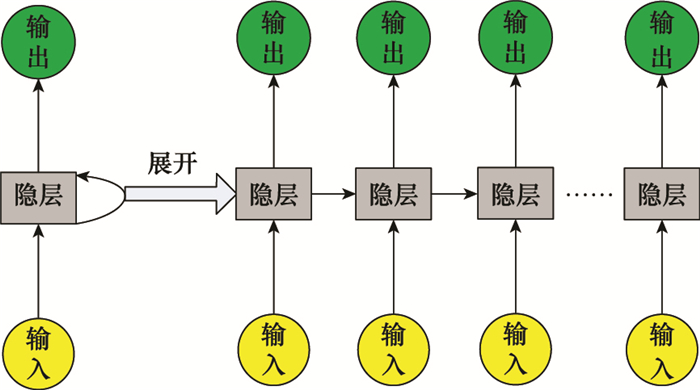
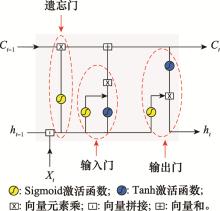
Fig.2
LSTM network unit"
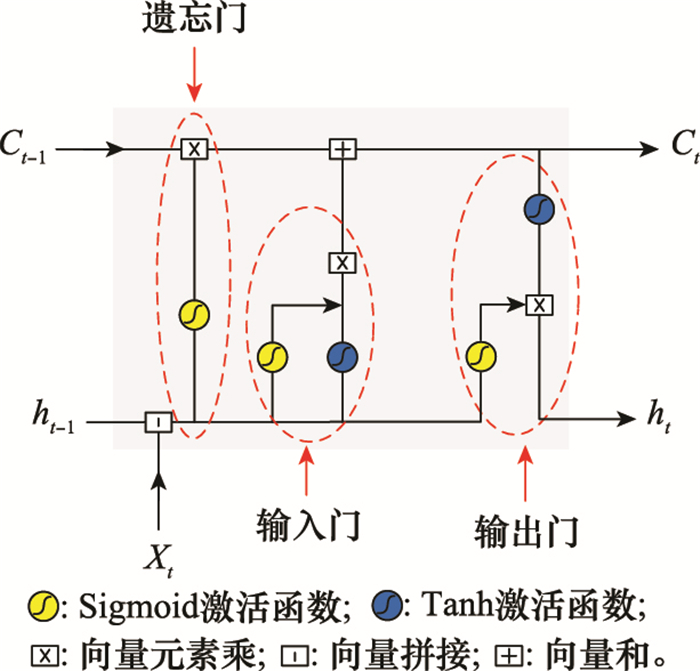
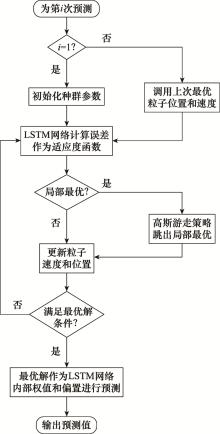
Fig.3
Flow chart of internal weight for PSO optimized LSTM"
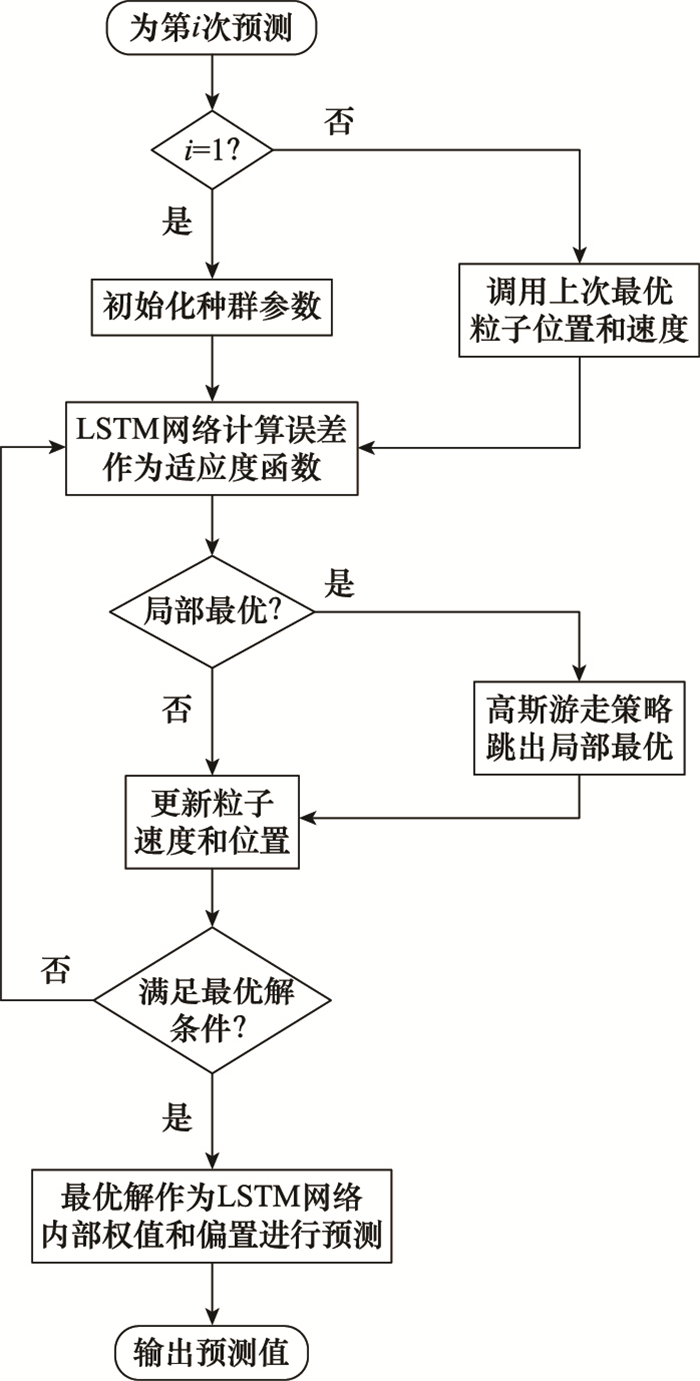
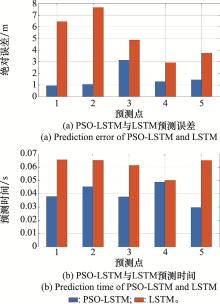
Fig.4
Prediction comparison of PSO-LSTM and LSTM"
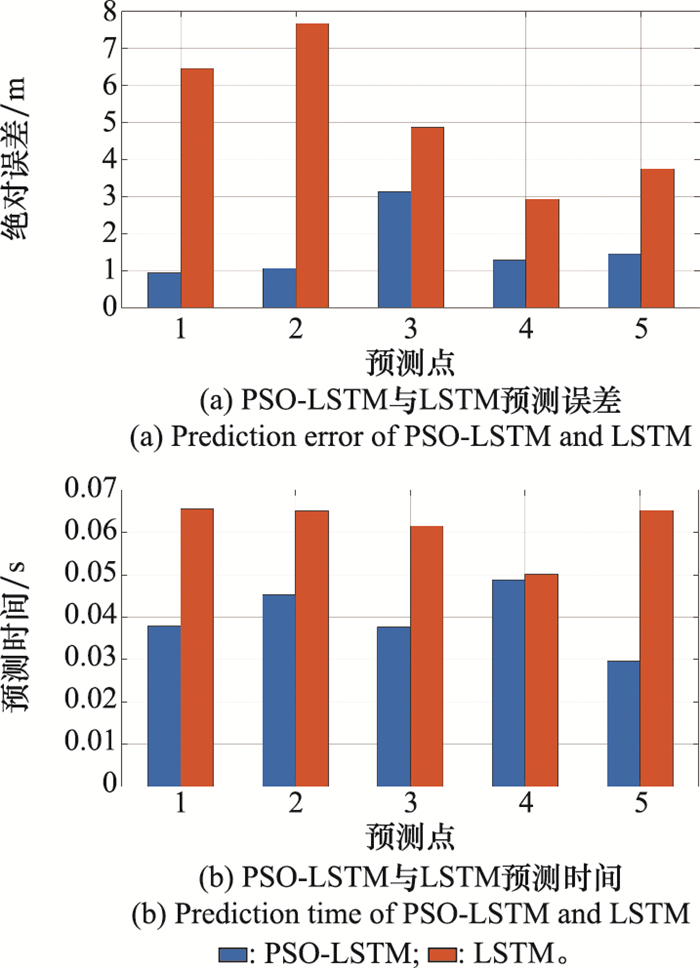
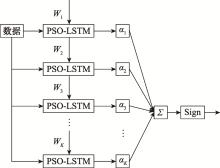
Fig.5
AdaBoost framework diagram"
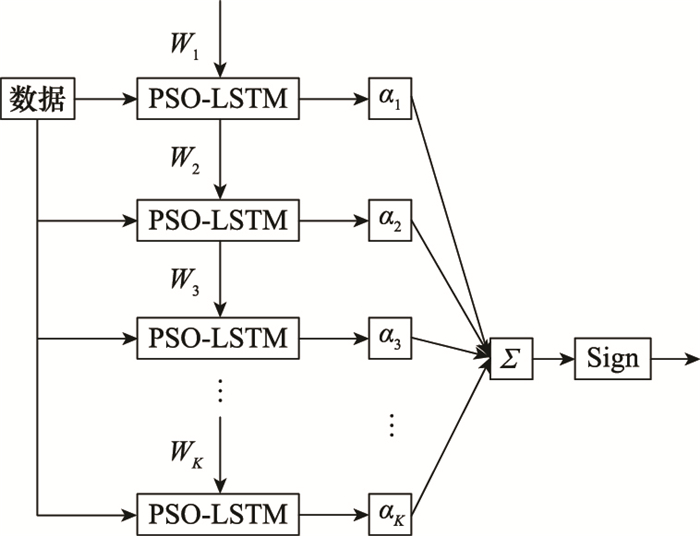
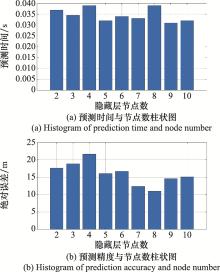
Fig.6
Relationship between prediction index and node number"

Table 1
Error and time consumption of strong predictor with different K values"
| K值 | 误差/m | 误差均值/m | 时间均值/s | ||||
| 1 | 2 | 3 | 4 | 5 | |||
| 1 | 66.7 | 42.9 | 50.7 | 57.9 | 47.7 | 53.2 | 0.038 |
| 2 | 30.3 | 23.4 | 35.9 | 30.8 | 30.5 | 30.2 | 0.049 |
| 3 | 14.9 | 31.6 | 30.7 | 27.0 | 15.3 | 23.9 | 0.063 |
| 4 | 17.6 | 20.4 | 25.9 | 18.8 | 19.4 | 20.4 | 0.075 |
| 5 | 14.3 | 15.3 | 16.2 | 16.7 | 15.6 | 15.6 | 0.087 |
| 6 | 13.3 | 13.1 | 14.9 | 13.3 | 12.8 | 13.5 | 0.102 |
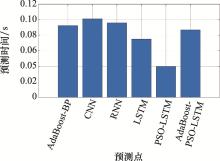
Fig.7
Comparison of single step time"


Fig.8
Prediction and error radar chart"

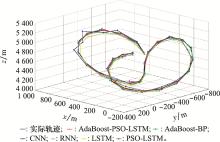
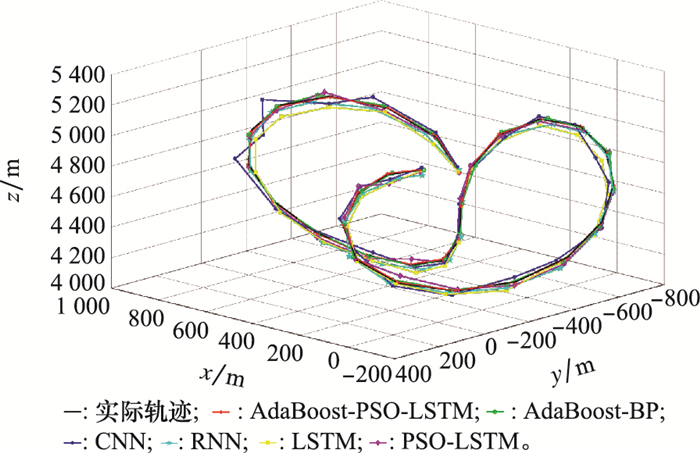
Fig.9
Three dimensional trajectory prediction results"
| 1 |
SLATTERY R , ZHAO Y . Trajectory synthesis for air traffic automation[J]. Journal of Guidance, Control, and Dynamics, 1997, 20 (2): 232- 238.
doi: 10.2514/2.4056 |
| 2 | LYMPEROPOULOS I, LYGEROS J. Adaptive aircraft trajectory prediction using particle filters[C]//Proc. of the AIAA Guidance, Navigation & Control Conference & Exhibit, 2008. |
| 3 |
ZHAO K G , WANG C X , XIAO G Q , et al. Research for nonlinear model predictive controls to laterally control unmanned vehicle trajectory tracking[J]. Applied sciences, 2020, 10, 6034.
doi: 10.3390/app10176034 |
| 4 | WANG X , JINAG X W , WU Y . A second-order HMM trajectory prediction method based on the spark platform[J]. Journal of Information Hiding and Multimedia Signal Processing, 2019, 10 (2): 346- 358. |
| 5 | MATHEW W, RAPOSO R, MARTINS B. Predicting future locations with hidden Markov models[C]//Proc. of the ACM Conference on Ubiquitous Computing, 2012: 911-918. |
| 6 | ZHANG K , XIONG J J , LI F . Bayesian trajectory prediction for a hypersonic gliding reentry vehicle based on intent inference[J]. Journal of Astronautics, 2018, 39, 1262- 1265. |
| 7 |
王新, 杨任农, 左家亮. 基于HPSO-TPFENN的目标机轨迹预测[J]. 西北工业大学学报, 2019, 37 (3): 612- 619.
doi: 10.3969/j.issn.1000-2758.2019.03.025 |
|
WANG X , YANG R N , ZUO J L . Trajectory prediction of target aircraft based on HPSO-TPFENN neural network[J]. Journal of Northwestern Polytechnical University, 2019, 37 (3): 612- 619.
doi: 10.3969/j.issn.1000-2758.2019.03.025 |
|
| 8 |
PAN T L , SUMALEE A , ZHONG R X , et al. Short-term traffic state prediction based on temporal-spatial correlation[J]. IEEE Trans.on Intelligent Transportation Systems, 2013, 14 (3): 1242- 254.
doi: 10.1109/TITS.2013.2258916 |
| 9 | 乔少杰, 金琨, 韩楠. 一种基于高斯混合模型的轨迹预测算法[J]. 软件学报, 2015, 26 (5): 1048- 1063. |
| QIAO S J , JIN K , HAN N . Trajectory prediction algorithm based on Gaussian mixture model[J]. Journal of Software, 2015, 26 (5): 1048- 1063. | |
| 10 |
WANG Q Y , ZHANG Z L , WANG Z Y , et al. The trajectory prediction of spacecraft by grey method[J]. Measurement Science and Technology, 2016, 27 (8): 085011- 085021.
doi: 10.1088/0957-0233/27/8/085011 |
| 11 |
QIAO S J , SHEN D Y , WANG X T , et al. A self-adaptive parameter selection trajectory prediction approach via hidden markova models[J]. IEEE Trans.on Intelligent Transportation Systems, 2015, 16 (1): 284- 296.
doi: 10.1109/TITS.2014.2331758 |
| 12 |
MA L , TIAN S . A hybrid CNN-LSTM model for aircraft 4D trajectory prediction[J]. IEEE Access, 2020, 8, 134668- 134680.
doi: 10.1109/ACCESS.2020.3010963 |
| 13 |
WEI L Z , ZHI B Q , ZHAO Z Y . A deep learning approach for aircraft trajectory prediction in terminal airspace[J]. IEEE Access, 2020, 8, 151250- 151266.
doi: 10.1109/ACCESS.2020.3016289 |
| 14 |
李明晓, 张恒才, 仇培元, 等. 一种基于模糊长短期神经网络的移动对象轨迹预测算法[J]. 测绘学报, 2018, 47 (12): 1660- 1669.
doi: 10.11947/j.AGCS.2018.20170268 |
|
LI M X , ZHANG H C , QIU P Y , et al. Predicting future locations with deep fuzzy-lstm network[J]. Acta Geodaetica et Cartographica Sinca, 2018, 47 (12): 1660- 1669.
doi: 10.11947/j.AGCS.2018.20170268 |
|
| 15 |
VIRTANEN K , RAIVIO T . Modeling pilot's sequential maneuvering decisions by a multistage influence diagram[J]. Journal of Guidance, Control, and Dynamics, 2004, 27 (4): 665- 677.
doi: 10.2514/1.11167 |
| 16 |
LECUN Y , BENGIO Y , HINTON G . Deeplearning[J]. Nature, 2015, 521, 436- 444.
doi: 10.1038/nature14539 |
| 17 | TONG Y , LIU Y L , WANG J , et al. Text steganography on RNN-generated lyrics[J]. Mathematical Bioences and Engineering, 2019, 16 (5): 5451- 5463. |
| 18 |
YANG Y , ZHOU M Y , FANG Q W , et al. AnnoFly: annotating Drosophila embryonic images based on an attention-enhanced RNN model[J]. Bioinformatics, 2019, 35 (16): 2834- 2842.
doi: 10.1093/bioinformatics/bty1064 |
| 19 |
SON G , KWON S , PARK N . Gender classification based on the non-lexical cues of emergency calls with recurrent neural networks (RNN)[J]. Symmetry, 2019, 11 (4): 525- 539.
doi: 10.3390/sym11040525 |
| 20 | 杨丽, 吴雨茜, 王俊丽. 循环神经网络研究综述[J]. 计算机应用, 2018, 38 (S2): 1- 6, 26. |
| YANG L , WU Y X , WANG J L . Research on recurrent neural network[J]. Journal of Computer Applications, 2018, 38 (S2): 1- 6, 26. | |
| 21 |
KUANG J W , YANG H Z , LIU J J , et al. Dynamic prediction of cardiovascular disease using improved LSTM[J]. International Journal of Crowd Science, 2019, 3 (1): 14- 25.
doi: 10.1108/IJCS-01-2019-0002 |
| 22 |
WANG P X , WANG H E , ZHANG H C , et al. A hybrid Markov and LSTM model for indoor location prediction[J]. IEEE Access, 2019, 7, 185928- 185940.
doi: 10.1109/ACCESS.2019.2961559 |
| 23 | JIANG Q, TANG C L, CHEN C, et al. Stock price forecast based on lstm neural network[C]//Proc. of the 12th International Conference on Management Science and Engineering Management, 2019: 393-408. |
| 24 | GU L L , LIU Y , ZHEN J Q . Optimization of PSO algorithm based on adaptive inertia weight and escape strategy[J]. Journal of Physics: Conference Series, 2020, 1486 (3): 032033- 032039. |
| 25 | 李牧东, 赵辉, 翁兴伟. 基于最优高斯随机游走和个体筛选策略的差分进化算法[J]. 控制与决策, 2016, 31 (8): 1379- 1386. |
| LI M D , ZHAO H , WENG X W . Differential evolution based on optimal Gaussian random walk and individual selection strategies[J]. Control and Decision, 2016, 31 (8): 1379- 1386. | |
| 26 | SUN S L , WEI Y J , WANG S Y . AdaBoost-LSTM ensemble learning for financial time series forecasting[J]. Computational Science-ICCS, 2018, 10862, 590- 597. |
| 27 |
ZHANG Y Y , JIA Y X , WU W Y , et al. A diagnosis method for the compound fault of gearboxes based on multi-feature and BP-AdaBoost[J]. Symmetry, 2020, 12 (3): 461- 480.
doi: 10.3390/sym12030461 |
| 28 |
TAHERKHANIA A , COSMAB G , MCGINNITYCD T M . AdaBoost-CNN: an adaptive boosting algorithm for convolutional neural networks to classify multi-class imbalanced datasets using transfer learning[J]. Neurocomputing, 2020, 404, 351- 366.
doi: 10.1016/j.neucom.2020.03.064 |
| 29 |
SUI X J , LI M Y , YING Y L , et al. Aerolysin nanopore identification of single nucleotides using the adaboost model[J]. Journal of Analysis & Testing, 2019, 3, 134- 139.
doi: 10.1007/s41664-019-00088-x |
| 30 | 毛景慧. 基于LSTM深度神经网络的股市时间序列预测精度的影响因素研究[D]. 广州: 暨南大学. |
| MAO J H. Research on influencing factors of stock market time series prediction accuracy based on lstm deep neural network[D]. Guangzhou: Jinan University. | |
| 31 |
BIAU G , CADRE B , ROUVIÈRE L . Accelerated gradient boosting[J]. Machine Learning, 2019, 108 (6): 971- 992.
doi: 10.1007/s10994-019-05787-1 |
| [1] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [2] | Jing YU, Enmi YONG, Hanyang CHEN, Dong HAO, Xiancai ZHANG. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack [J]. Systems Engineering and Electronics, 2022, 44(9): 2849-2857. |
| [3] | Xingguang XU, Xiaofeng WANG, Lu YAO, Zhang REN. Formation configuration and communication topology optimization for fixed-wing UAVs [J]. Systems Engineering and Electronics, 2022, 44(9): 2936-2946. |
| [4] | Jianfeng YANG, Heye XIAO, Liang LI, Junqiang BAI, Weihao DONG. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism [J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. |
| [5] | Ruiping JI, Chengyi ZHANG, Yan LIANG, Yuedong WANG. Trajectory prediction of boost-phase ballistic missile based on LSTM [J]. Systems Engineering and Electronics, 2022, 44(6): 1968-1976. |
| [6] | Yuanjie LU, Zhimin LIU, Zhixiao SUN, Dong KAN. Model-based integrated evaluation of UAV system architecture [J]. Systems Engineering and Electronics, 2022, 44(4): 1239-1245. |
| [7] | Hongyao LI, Xiaoqiang LI, Xinzhong HAN, Xueli XIE, Jianxiang XI. Cooperative object detection and recognition algorithm for multiple UAVs based on decision fusion [J]. Systems Engineering and Electronics, 2022, 44(3): 746-754. |
| [8] | Yuanyuan ZHANG, Yang GAO, Peng ZHU, Jintao LIU, Shushan GU. UAV reconnaissance tactical planning based on colored Petri nets [J]. Systems Engineering and Electronics, 2022, 44(3): 900-907. |
| [9] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [10] | Xueyong YU, Ye ZHU, Lixiang QIU, Hongbo ZHU. Energy efficient offloading strategy for UAV aided edgecomputing systems [J]. Systems Engineering and Electronics, 2022, 44(3): 1022-1029. |
| [11] | Xingjia YANG, Keqing DUAN, Xiang LI, Wei QI. Resolving range ambiguity for cooperative detection using UAV swarms [J]. Systems Engineering and Electronics, 2022, 44(2): 480-489. |
| [12] | Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance [J]. Systems Engineering and Electronics, 2022, 44(2): 529-537. |
| [13] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [14] | Buhua LIU, Dan DING, Liu YANG, Naiyang XUE, Zhongqian LIU. OFDM data transmission technology of UAV based on deep neural network [J]. Systems Engineering and Electronics, 2022, 44(2): 696-702. |
| [15] | Zhipeng WU, Ping ZHANG, Zhen LI, Lei HUANG, Chang LIU, Shuo GAO. Vegetation height inversion method based on light-weighted and small UAV-radar [J]. Systems Engineering and Electronics, 2022, 44(12): 3667-3675. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||