Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (6): 1644-1650.doi: 10.12305/j.issn.1001-506X.2021.06.22
• Guidance, Navigation and Control • Previous Articles Next Articles
Modeling of error probability distribution of fiber-optic gyrocompass based on Gaussian mixture model
Yaojin HU, Hongwei BIAN, Rongying WANG*, Heng MA
- College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China
-
Received:2020-06-28Online:2021-05-21Published:2021-05-28 -
Contact:Rongying WANG
CLC Number:
Cite this article
Yaojin HU, Hongwei BIAN, Rongying WANG, Heng MA. Modeling of error probability distribution of fiber-optic gyrocompass based on Gaussian mixture model[J]. Systems Engineering and Electronics, 2021, 43(6): 1644-1650.
share this article
Table 1
Simulation analysis parameters of GMM"
| 类型 | 参数取值 | ||
| α | μ | σ | |
| 真实参数 | 0.20 | -5.00 | 1.50 |
| 0.15 | 13.00 | 5.00 | |
| 0.65 | 0.00 | 2.00 | |
| 传统EM算法 | 0.16 | -3.40 | 1.78 |
| 0.35 | 12.90 | 5.18 | |
| 0.49 | -0.14 | 2.22 | |
| Robust-EM算法 | 0.17 | -5.10 | 1.37 |
| 0.15 | 13.30 | 4.73 | |
| 0.68 | -0.14 | 2.03 | |

Fig.1
Probability density histogram of sample data"

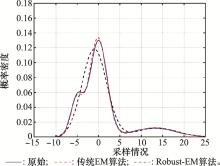
Fig.2
Fitting effect of the Robust-EM algorithm and the traditional EM algorithm"

Table 2
RMSE of device GMM"
| 设备序号 | 1 | 2 | 3 | 4 |
| RMSE | 0.047 039 | 0.074 171 | 0.080 862 | 0.072 617 |
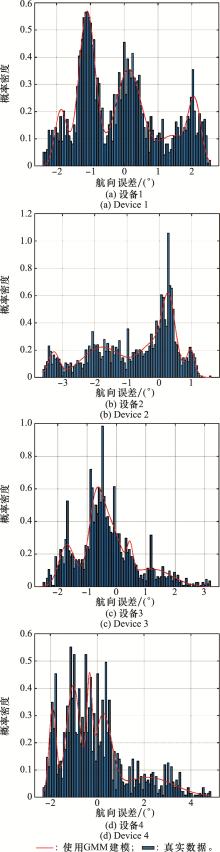
Fig.3
Fitting effect graph of GMM"

Table 3
GMM parameters of device 1"
| 分模型序号 | 参数取值 | ||
| α | μ | σ | |
| 1 | 0.088 14 | -1.873 34 | 0.172 44 |
| 2 | 0.103 62 | 2.079 27 | 0.186 38 |
| 3 | 0.115 63 | 1.431 74 | 0.417 17 |
| 4 | 0.345 86 | 0.126 94 | 0.389 07 |
| 5 | 0.346 75 | -1.097 89 | 0.243 74 |
Table 4
GMM parameters of device 2"
| 分模型序号 | 参数取值 | ||
| α | μ | σ | |
| 1 | 0.057 65 | 0.970 74 | 0.123 22 |
| 2 | 0.073 24 | -3.270 37 | 0.167 04 |
| 3 | 0.217 99 | 0.292 09 | 0.196 89 |
| 4 | 0.299 22 | -0.112 53 | 0.472 97 |
| 5 | 0.351 91 | -1.771 78 | 0.632 93 |
Table 5
GMM parameter of device 3"
| 分模型序号 | 参数取值 | ||
| α | μ | σ | |
| 1 | 0.035 16 | 0.460 58 | 0.095 89 |
| 2 | 0.181 49 | 1.212 21 | 0.668 04 |
| 3 | 0.170 72 | -1.692 60 | 0.266 11 |
| 4 | 0.171 56 | -0.715 14 | 0.221 72 |
| 5 | 0.441 07 | -0.337 65 | 0.435 60 |
Table 6
GMM parameter of device 4"
| 分模型序号 | 参数取值 | ||
| α | μ | σ | |
| 1 | 0.094 30 | -0.330 48 | 0.109 85 |
| 2 | 0.125 06 | -1.902 31 | 0.154 10 |
| 3 | 0.213 37 | 2.142 16 | 1.162 40 |
| 4 | 0.261 91 | 0.251 36 | 0.363 02 |
| 5 | 0.305 35 | -1.023 62 | 0.298 32 |
| 1 | GJB 6850.132-2009. 水面舰艇系泊和航行试验规程第132部分: 惯性导航系统试验[S]. 北京: 总装备部军标出版发行部, 2009. |
| GJB 6850.132-2009. Code for mooring and sea trials of surface naval ships—Part132: test for inertial navigation system[S]. Beijing: Military Standard Press of the Headquarters of General Equipment, 2009. | |
| 2 | RAITOHARJU F , GARCÍA-FERNÁNDEZ R , HOSTETTLER R , et al. Gaussian mixture models for signal mapping and positioning[J]. Signal Processing, 2019, 168, 107330. |
| 3 |
CELLER B G , LE P N , ARGHA A , et al. GMM-HMM-Based blood pressure estimation using time-domain features[J]. IEEE Trans.on Instrumentation and Measurement, 2020, 69 (6): 3631- 3641.
doi: 10.1109/TIM.2019.2937074 |
| 4 |
FAHRETTIN A , GÖKHAN I · , E K M , et al. Classification of pulsars with Dirichlet process Gaussian mixture model[J]. Monthly Notices of the Royal Astronomical Society, 2020, 493, 713- 722.
doi: 10.1093/mnras/staa154 |
| 5 | 杨望灿, 张培林, 陈彦龙, 等. 基于量子高斯混合模型的振动信号降噪方法[J]. 振动与冲击, 2019, 38 (11): 235- 241. |
| YANG W C , ZHANG P L , CHEN Y L , et al. De-noising algorithm of vibration signals based on quantum Gaussian mixture model[J]. Journal of Vibration and Shock, 2019, 38 (11): 235- 241. | |
| 6 | 孔云波, 冯新喜, 许丁友. 基于QMC采样的GMPHD分布式融合方法[J]. 系统工程与电子技术, 2017, 39 (8): 1702- 1708. |
| KONG Y B , FENG X X , XU D Y . Distributed fusion of Gaussian mixture probability hypothesis density based on quasi-Monte Carlo samping[J]. Systems Engineering and Electronics, 2017, 39 (8): 1702- 1708. | |
| 7 | 汪韧, 郭静波, 惠俊鹏, 等. 基于卷积高斯混合模型的统计压缩感知[J]. 物理学报, 2019, 68 (18): 83- 93. |
| WANG R , GUO J B , HUI J P , et al. Statistical compressive sen-sing based on convolutional Gaussian mixture model[J]. Acta Physica Sinica, 2019, 68 (18): 83- 93. | |
| 8 | 李聪聪, 王彤, 相禹维, 等. 基于改进高斯混合模型的概率潮流解析方法[J]. 电力系统保护与控制, 2020, 48 (10): 146- 155. |
| LI C C , WANG T , XIANG Y W , et al. Analytical method based on improved Gaussian mixture model for probabilistic load flow[J]. Power System Protection and Control, 2020, 48 (10): 146- 155. | |
| 9 | 黄凤荣, 朱雨晨, 杨泽清, 等. 基于高斯混合模型的惯导/计程仪组合导航方法[J]. 中国惯性技术学报, 2019, 27 (1): 38- 41. |
| HUANG F R , ZHU Y C , YANG Z Q , et al. SINS/EML navigation method based on Gaussian mixtures unscented Kalman filter[J]. Journal of Chinese Inertial Technology, 2019, 27 (1): 38- 41. | |
| 10 | 井沛良, 段宇, 韩超, 等. 基于高斯混合模型和期望最大化算法的非高斯分布圆概率误差估计方法研究[J]. 兵工学报, 2019, 40 (2): 148- 155. |
| JING P L , DUAN Y , HAN C , et al. Circular error probable estimation method based on Gaussian mixture model and expectation maximum algorithm for non-Gaussian distribution[J]. Acta Armamentarii, 2019, 40 (2): 148- 155. | |
| 11 |
孙浩, 郭迎清, 赵万里. 基于GMM聚类方法构建经验模型的机载实时模型改进方法[J]. 西北工业大学学报, 2020, 38 (3): 507- 514.
doi: 10.3969/j.issn.1000-2758.2020.03.008 |
|
SUN H , GUO Y Q , ZHAO W L . Improved model for on-board real-time by constructing empirical model via GMM clustering method[J]. Journal of Northwestern Polytechnical University, 2020, 38 (3): 507- 514.
doi: 10.3969/j.issn.1000-2758.2020.03.008 |
|
| 12 |
石雪, 李玉, 赵泉华. 自适应类别的层次高斯混合模型遥感影像分割[J]. 电子学报, 2020, 48 (1): 131- 136.
doi: 10.3969/j.issn.0372-2112.2020.01.016 |
|
SHI X , LI Y , ZHAO Q H . Remote sensing image segmentation based on hierarchy gaussian mixture model with self-adaptive number of classes[J]. Acta Electronica Sinica, 2020, 48 (1): 131- 136.
doi: 10.3969/j.issn.0372-2112.2020.01.016 |
|
| 13 |
REN H , HU T T . A local neighborhood robust fuzzy clustering image segmentation algorithm based on an adaptive feature selection gaussian mixture model[J]. Sensors, 2020, 20 (8): 2391.
doi: 10.3390/s20082391 |
| 14 |
SUN L L , CAO Y H , WU W H , et al. A multi-target tracking algorithm based on Gaussian mixture model[J]. Journal of Systems Engineering and Electronics, 2020, 31 (3): 482- 487.
doi: 10.23919/JSEE.2020.000020 |
| 15 |
MCLACHLAN G J , LEE S X , RATHNAYAKE S I . Finite mixture models[J]. Annual Review of Statistics and Its Application, 2019, 6 (1): 355- 378.
doi: 10.1146/annurev-statistics-031017-100325 |
| 16 |
PATEL E , KUSHWAHA D S . Clustering cloud workloads: K-means vs Gaussian mixture model[J]. Procedia Computer Science, 2020, 171, 158- 167.
doi: 10.1016/j.procs.2020.04.017 |
| 17 |
CHEN Y X , GEORGIOU T , TANNENBAUM A . Optimal transport for Gaussian mixture models[J]. IEEE Access, 2019, 7, 6269- 6278.
doi: 10.1109/ACCESS.2018.2889838 |
| 18 | MELNYKOV V , MELNYKOV I . Initializing the EM algorithm in Gaussian mixture models with an unknown number of components[J]. Computational Statistics & Data Analysis, 2012, 56 (6): 1381- 1395. |
| 19 |
XU K K , YANG H D , ZHU C J , et al. Finite Gaussian mixture model based multimodeling for nonlinear distributed parameter systems[J]. IEEE Trans.on Industrial Informatics, 2020, 16 (3): 1754- 1763.
doi: 10.1109/TII.2019.2923917 |
| 20 |
MAITRA R . Initializing partition-optimization algorithms[J]. IEEE/ACM Trans.on Computer Biol Bioinform, 2009, 6 (1): 144- 157.
doi: 10.1109/TCBB.2007.70244 |
| 21 |
MAITRA R , MELNYKOV V . Simulating data to study performance of finite mixture modeling and clustering algorithms[J]. Journal of Computational and Graphical Statistics, 2010, 19 (2): 354- 376.
doi: 10.1198/jcgs.2009.08054 |
| 22 | MELNYKOV V , MAITRA R . Finite mixture models and model-based clustering[J]. Statistics Surveys, 2010, 4, 80- 116. |
| 23 | MCLACHLAN G J , RATHNAYAKE S I . On the number of components in a Gaussian mixture model[J]. Wiley Interdisciplinary Reviews Data Mining & Knowledge Discovery, 2014, 4 (5): 341- 355. |
| 24 | SHIPLEY B , DOUMA J C . Generalized AIC and chi-squared statistics for path models consistent with directed acyclic graphs[J]. Ecology, 2020, 101 (3): e02960. |
| 25 | 成玮, 张周锁, 何正嘉. 采用信息理论准则的信号源数估计方法及性能对比[J]. 西安交通大学学报, 2015, 49 (8): 38- 44. |
| CHENG W , ZHANG Z S , HE Z J . Information criterion-based source number estimation methods with comparison[J]. Journal of Xi'an Jiaotong University, 2015, 49 (8): 38- 44. | |
| 26 |
WU H P , CHEUNG S F , LEUNG S O . Simple use of BIC to assess model selection uncertainty: an illustration using mediation and moderation models[J]. Multivariate Behavioral Research, 2020, 55 (1): 1- 16.
doi: 10.1080/00273171.2019.1574546 |
| 27 | GU Y L , WEI H L , BALIKHIN M A . Nonlinear dynamic predictive model selection and interference using information criteria[J]. Systems Science & Control Engineering, 2018, 6 (1): 319- 328. |
| 28 |
YANG M S , LAI C Y , LIN C Y . A robust EM clustering algorithm for Gaussian mixture models[J]. Pattern Recognition, 2012, 45 (11): 3950- 3961.
doi: 10.1016/j.patcog.2012.04.031 |
| 29 | 晏良, 段晓君, 刘博文, 等. 基于Kullback-Leibler距离离散度的加权代理模型[J]. 国防科技大学学报, 2019, 41 (3): 159- 165. |
| YAN L , DUAN X J , LIU B W , et al. Weighted surrogate models based on Kullback-Leibler divergence[J]. Journal of National University of Defense Technology, 2019, 41 (3): 159- 165. | |
| 30 | VIROLI C , MCLACHLAN G J . Deep Gaussian mixture mo-dels[J]. Statistics & Computing, 2019, 29 (1): 43- 51. |
| [1] | Lei WANG, Zhiyong ZHANG, Weigui ZENG, Silei CAO, Tianhe ZHANG. An improved GMM clustering based on data field and decision graph [J]. Systems Engineering and Electronics, 2022, 44(9): 2743-2751. |
| [2] | Baohua FAN, Le ZUO, Yong TANG, Zehua HU. DOA estimation of multiple time-varying signals with expectation-maximization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 420-426. |
| [3] | XU Ting-xue, WANG Hao-wei, ZHANG Xin. Application of EM algorithm to estimate hyper parameters of the random parameters of Wiener process [J]. Systems Engineering and Electronics, 2015, 37(3): 707-712. |
| [4] | YU Yue-cheng, SHENG Jia-gen, ZOU Xiao-hua. Generative clustering analysis with constraints regularization [J]. Systems Engineering and Electronics, 2014, 36(4): 777-783. |
| [5] | SUN Tian-yu, SHI Yi-min, WEI Wei. Reliability analysis for B-S components under progressive hybrid Type I censoring test [J]. Systems Engineering and Electronics, 2014, 36(11): 2326-2331. |
| [6] | DOU Gao-qi, LIU Hong-bo, GAO Jun. Iterative phase synchronization using low-density parity check codes [J]. Journal of Systems Engineering and Electronics, 2013, 35(6): 1303-1306. |
| [7] | PENG Bao-hua,ZHOU Jing-lun,SUN Quan,FENG Jing,JIN Guang. Residual lifetime prediction of products based on fusion of degradation data and lifetime data [J]. Journal of Systems Engineering and Electronics, 2011, 33(5): 1073-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||