
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (6): 1867-1879.doi: 10.12305/j.issn.1001-506X.2025.06.15
符小卫, 王辛夷, 乔哲
收稿日期:2024-03-05
出版日期:2025-06-25
发布日期:2025-07-09
通讯作者:
符小卫
作者简介:符小卫 (1976—), 男, 教授, 博士, 主要研究方向为无人系统协同控制与决策、无人机群智能Xiaowei FU, Xinyi WANG, Zhe QIAO
Received:2024-03-05
Online:2025-06-25
Published:2025-07-09
Contact:
Xiaowei FU
摘要:
在多无人机对抗中, 无人机通信范围内的友方数量不定, 导致其获得的信息量存在变化。而深度强化学习中神经网络的输入维度是固定的, 很多算法只考虑距离较近的固定数量友方无人机的交互信息, 导致信息丢失且不符合实际战场环境。对此, 基于多智能体深度确定性策略梯度(multi-agent deep deterministic policy gradient, MADDPG)算法, 结合注意力机制, 提出注意力状态深度确定性策略梯度(attention state-deep deterministic policy gradient, ASDDPG)算法, 将变化的信息转化为固定长度的特征向量, 解决信息量与输入维度不匹配的问题, 并通过编解码结构进行状态特征提取, 增强无人机的决策能力。通过仿真实验对算法的性能进行对比分析, 验证该算法控制下的无人机具有更高胜率, 且泛化性良好, 在提升无人机对抗决策能力和泛化性方面具备优势。
中图分类号:
符小卫, 王辛夷, 乔哲. 基于ASDDPG算法的多无人机对抗策略[J]. 系统工程与电子技术, 2025, 47(6): 1867-1879.
Xiaowei FU, Xinyi WANG, Zhe QIAO. Confront strategy of multi-unmanned aerial vehicle based on ASDDPG algorithm[J]. Systems Engineering and Electronics, 2025, 47(6): 1867-1879.

图1
多无人机对抗场景示意图"
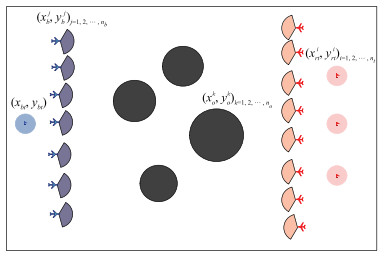
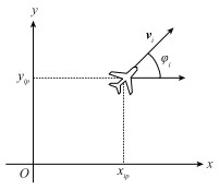
图2
无人机二维运动模型"
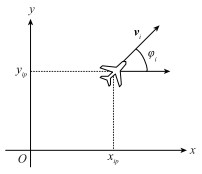
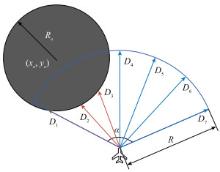
图3
无人机雷达探测障碍物情况"
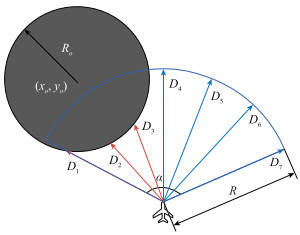
图4
无人机雷达探测数据计算流程"
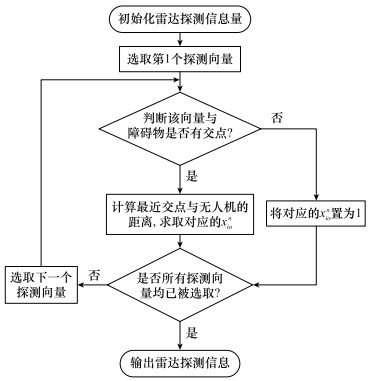
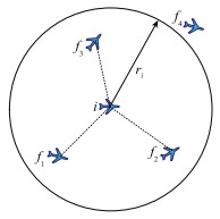
图5
无人机机间通信示意图"
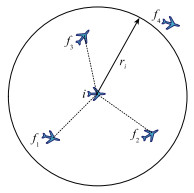
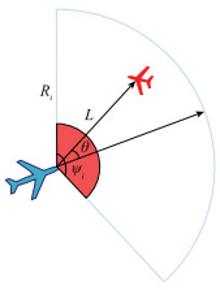
图6
毁伤分析示意图"
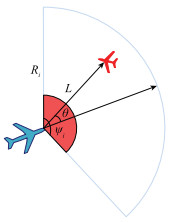
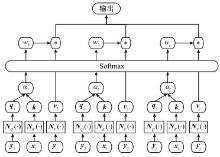
图7
基于注意力网络的状态处理流程"
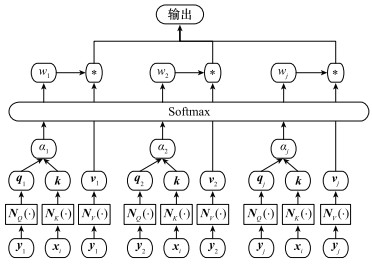
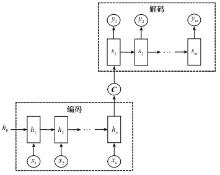
图8
编码解码模型框架"
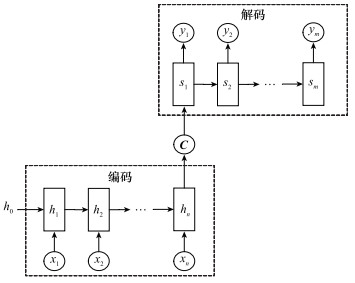
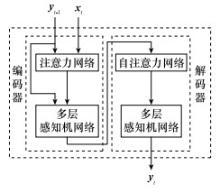
图9
过往状态信息提取网络"
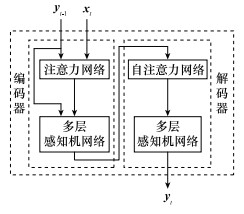
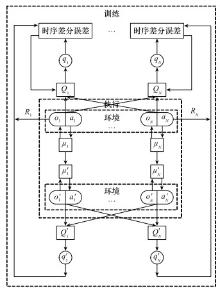
图10
MADDPG算法网络结构"
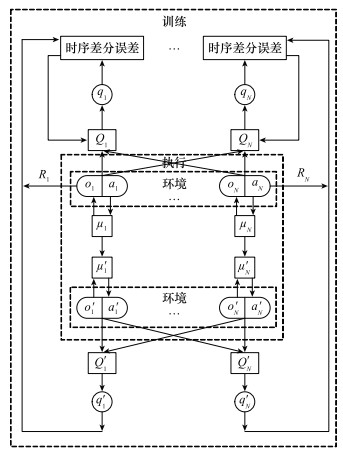
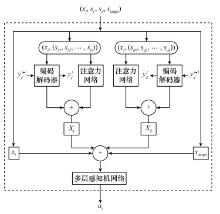
图11
演员网络结构"
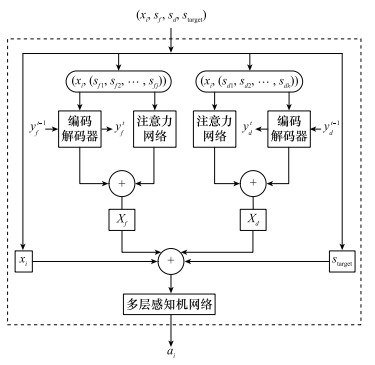
图12
评论家网络结构"
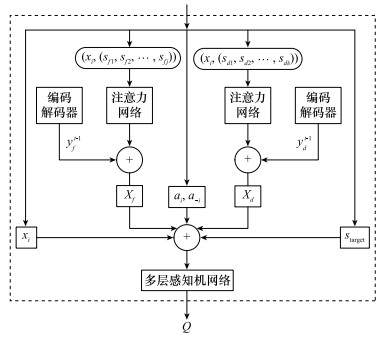
表1
环境和无人机的属性参数"
| 环境和无人机属性 | 参数 |
| 战场范围(xmin, xmax, ymin, ymax)/km | 0, 100, 0, 80 |
| 障碍物数量 | 8 |
| 障碍物区域半径及数量/km | 4(2个), 5(3个), 6(3个) |
| 障碍物随机生成区域/km | [15, 85]×[15, 65] |
| 红蓝两方无人机数量 | 10~10或15~15 |
| 红方无人机雷达探测范围(火力打击范围)半径/km | 6 |
| 红方无人机雷达探测角度范围(火力打击角度范围)/(°) | 120 |
| 蓝方无人机雷达探测范围(火力打击范围)半径/km | 7.5 |
| 蓝方无人机雷达探测角度范围(火力打击角度范围)/(°) | 120 |
| 红方无人机最大速度/(m/s) | 340 |
| 蓝方无人机最大速度/(m/s) | 340 |
| 红方无人机最大角速度/(rad/s) | π/22.6 |
| 蓝方无人机最大角速度/(rad/s) | π/15.7 |
| 红方无人机的位置随机生成区域/km | [90, 100]×[0, 80] |
| 蓝方无人机的位置随机生成区域/km | [0, 10]×[0, 80] |
| 红方无人机初始航向角/rad | π |
| 蓝方无人机初始航向角/rad | 0 |
| 红方无人机阵地中心位置及半径/km | [98, 40], 2 |
| 蓝方无人机阵地中心位置及半径/km | [2, 40], 2 |
| 红方无人机信息交流半径/km | 20 |
| 蓝方无人机信息交流半径/km | 20 |
| 无人机碰撞坠毁距离/km | 0.5 |
| 无人机毁伤概率系数 | 0.2 |
| 目标区域半径/km | 2 |
表2
算法超参数设置"
| 算法超参数 | 数值 |
| 最大回合数 | 1 000 |
| 每回合最大步数 | 1 000 |
| 学习率 | 0.000 1 |
| 初始探索率 | 0.1 |
| 软更新率 | 0.01 |
| 折扣因子 | 0.95 |
| 经验池大小 | 50 000 |
| 批采样数量 | 64 |
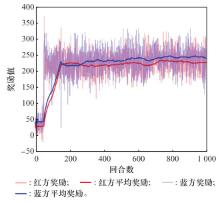
图13
ASDDPG算法奖励曲线图"
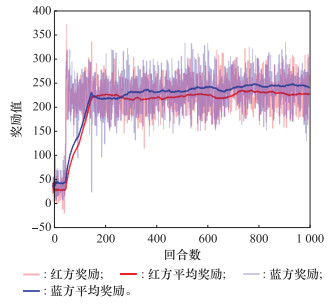
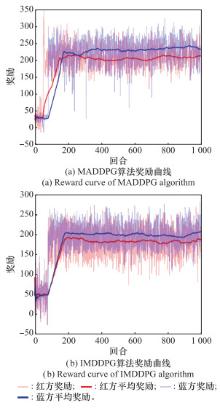
图14
其他算法奖励曲线"
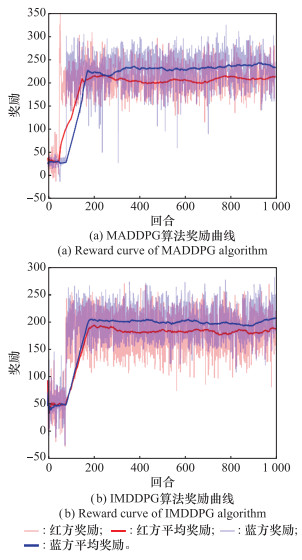
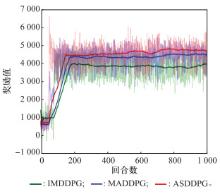
图15
多无人机攻防对抗训练奖励曲线图"
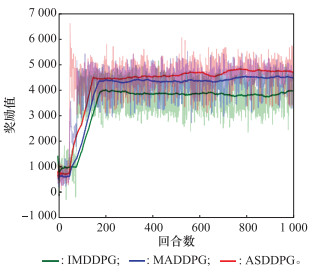
表3
3种算法训练过程的数据对比"
| 算法 | 在300回合时的奖励值 | 300到1 000回合的平均奖励值 | 训练时奖励所达到的平均奖励峰值 |
| IMDDPG | 3 868.36 | 3 815.73 | 3 953.01 |
| MADDPG | 4 291.34 | 4 382.77 | 4 514.79 |
| ASDDPG | 4 454.19 | 4 624.13 | 4 799.81 |
表4
红方ASDDPG算法测试结果"
| 蓝方算法 | 蓝方成功率 | 红方成功率 |
| IMDDPG算法 | 54.1 | 45.9 |
| MADDPG算法 | 57.4 | 42.6 |
| ASDDPG算法 | 60.2 | 39.8 |
表5
蓝方ASDDPG算法测试结果"
| 红方算法 | 红方成功率 | 蓝方成功率 |
| IMDDPG算法 | 34.2 | 65.8 |
| MADDPG算法 | 37.3 | 62.7 |
| ASDDPG算法 | 39.8 | 60.2 |

图16
多无人机10v10对抗过程"
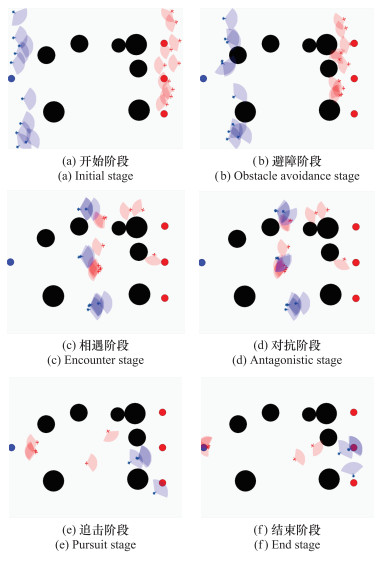

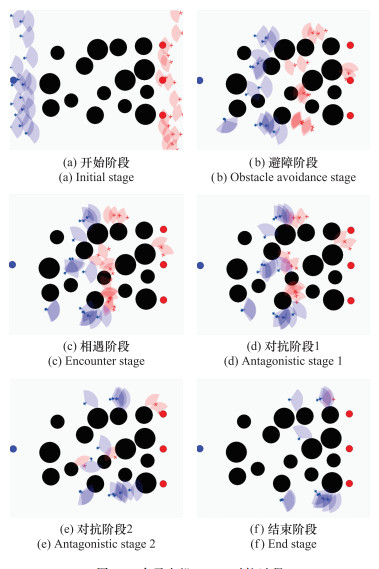
图17
多无人机15v15对抗过程"
| 1 |
胡延霖, 王翌丞, 于克振. 信息化战争中无人机的作战用途及发展趋势分析[J]. 现代商贸工业, 2010, 22 (2): 242- 243.
doi: 10.3969/j.issn.1672-3198.2010.02.152 |
|
HU Y L , WANG L C , YU K Z . Analysis of operational use and development trend of UAVs in information warfare[J]. Modern Business Trade Industry, 2010, 22 (2): 242- 243.
doi: 10.3969/j.issn.1672-3198.2010.02.152 |
|
| 2 |
CHI P , WEI J H , WU K , et al. A bio-inspired decision-making method of UAV swarm for attack-defense confrontation via multi-agent reinforcement learning[J]. Biomimetics, 2023, 8 (2): 222- 245.
doi: 10.3390/biomimetics8020222 |
| 3 |
SHAHID S , ZHEN Z Y , JAVAID U , et al. Offense-defense distributed decision making for swarm vs. swarm confrontation while attacking the aircraft carriers[J]. Drones, 2022, 6 (10): 271- 291.
doi: 10.3390/drones6100271 |
| 4 | 万华翔, 张雅舰. 蜂群无人机对战场环境的影响及对抗技术研究[J]. 飞航导弹, 2019 (4): 68- 72. |
| WAN H X , ZHANG Y J . Research on the influence of swarm UAV on battlefield environment and countermeasure technology[J]. Aerodynamic Missile Journal, 2019 (4): 68- 72. | |
| 5 | 罗德林, 张海洋, 谢荣增, 等. 基于多agent系统的大规模无人机集群对抗[J]. 控制理论与应用, 2015, 32 (11): 1498- 1504. |
| LUO D L , ZHANG H Y , XIE R Z , et al. Unmanned aerial vehicles swarm conflict based on multi-agent system[J]. Control Theory & Applications, 2015, 32 (11): 1498- 1504. | |
| 6 | DUAN H B , LEI Y Q , XIA J , et al. Autonomous maneuver decision for unmanned aerial vehicle via improved pigeon-inspired optimization[J]. IEEE Trans.on Aerospace and Electronic Systems, 2022, 59 (3): 3156- 3170. |
| 7 |
ZHANG J , XING J H . Cooperative task assignment of multi- UAV system[J]. Chinese Journal of Aeronautics, 2020, 33 (11): 2825- 2827.
doi: 10.1016/j.cja.2020.02.009 |
| 8 |
XU J . Research on key technologies of UAV cluster cooperative system for internet of things applications[J]. Journal of Control and Decision, 2024, 11 (1): 26- 35.
doi: 10.1080/23307706.2022.2089749 |
| 9 | XU J, GUO Q, XIAO L, et al. Autonomous decision-making method for combat mission of UAV based on deep reinforcement learning[C]//Proc. of the IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference, 2019. |
| 10 | DANOY G, BRUST M R, BOUVRY P. Connectivity stability in autonomous multi-level UAV swarms for wide area monitoring[C]//Proc. of the 5th ACM Symposium on Development and Analysis of Intelligent Vehicular Networks and Applications, 2015. |
| 11 |
LIU H Y , WU K , HUANG K H , et al. Optimization of large- scale UAV cluster confrontation game based on integrated evol ution strategy[J]. Cluster Computing, 2024, 27 (1): 515- 529.
doi: 10.1007/s10586-022-03961-0 |
| 12 | WANG B L , LI S G , GAO X Z , et al. Weighted mean field re inforcement learning for large-scale UAV swarm confrontation[J]. Applied Intelligence, 2023, 53 (5): 5274- 5289. |
| 13 |
FU X J , YAN H . Neural network optimal control for tripartite UAV confrontation systems based on fuzzy differential game[J]. Scientific Reports, 2024, 14 (1): 21547- 21571.
doi: 10.1038/s41598-024-71844-y |
| 14 | YANG R C, GAO H B, WU X D, et al. An intention recognition method based on Bayesian network for UAV formation in confrontation[C]//Proc. of the International Conference on Autonomous Unmanned Systems, 2022: 2799-2809. |
| 15 |
JIANG C J , FANG Y , ZHAO P H , et al. Intelligent UAV identity authentication and safety supervision based on behavior modeling and prediction[J]. IEEE Trans.on Industrial Informatics, 2020, 16 (10): 6652- 6662.
doi: 10.1109/TII.2020.2966758 |
| 16 |
LUO D L , FAN Z H , YANG Z Y , et al. Multi-UAV cooperative maneuver decision-making for pursuit-evasion using im proved MADRL[J]. Defence Technology, 2024, 35, 187- 197.
doi: 10.1016/j.dt.2023.11.013 |
| 17 |
YANG M , LIU G J , ZHOU Z Y , et al. Partially observable mean field multi-agent reinforcement learning based on graph attention network for UAV swarms[J]. Drones, 2023, 7 (7): 476- 497.
doi: 10.3390/drones7070476 |
| 18 |
ZHANG T T , CHAI L , WANG S S , et al. Improving autonomous behavior strategy learning in an unmanned swarm system through knowledge enhancement[J]. IEEE Trans.on Reliability, 2022, 71 (2): 763- 774.
doi: 10.1109/TR.2022.3158279 |
| 19 | SHEIKH H U, BOLONI L. Multi-agent reinforcement learn ing for problems with combined individual and team reward[C]// Proc. of the International Joint Conference on Neural Networks, 2020. |
| 20 | VLAHOV B, SQUIRES E, STRICKLAND L, et al. On developing a UAV pursuit-evasion policy using reinforcement learning[C]//Proc. of the 17th IEEE International Conference on Machine Learning and Applications, 2018. |
| 21 | HUO Z X, DAI S L, YUAN M X, et al. A reinforcement learning based multiple strategy framework for tracking a mo-ving target[C]//Proc. of the IEEE/ASME International Conference on Advanced Intelligent Mechatronic, 2020. |
| 22 | ZHU J D , FU X W , QIAO Z . UAVs maneuver decision-ma-king method based on transfer reinforcement learning[J]. Computational Intelligence and Neuroscience, 2022, 2022 (1): 2399796. |
| 23 |
YANG J F , YANG X W , YU T Q . Multi-unmanned aerial ve hicle confrontation in intelligent air combat: a multi-agent deep reinforcement learning approach[J]. Drones, 2024, 8 (8): 382- 399.
doi: 10.3390/drones8080382 |
| 24 |
GONG Z H , XU Y , LUO D L . UAV cooperative air combat maneuvering confrontation based on multi-agent reinforcement learning[J]. Unmanned Systems, 2023, 11 (3): 273- 286.
doi: 10.1142/S2301385023410029 |
| 25 | LIU D , ZONG Q , ZHAGN X Y , et al. Game of drones: intelligent online decision making of multi-UAV confrontation[J]. IEEE Trans.on Emerging Topics in Computational Intelligence, 2024, 8 (2): 2086- 2100. |
| 26 | WANG Z, LIU F, GUO J, et al. UAV swarm confrontation based on multi-agent deep reinforcement learning[C]//Proc. of the 41st Chinese Control Conference, 2022: 4996-5001. |
| 27 | HU S G , RU L , LYU M L , et al. Evolutionary game analysis of behaviour strategy for UAV swarm in communication-constrained environments[J]. IET Control Theory & Applications, 2024, 18 (3): 350- 363. |
| 28 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]//Proc. of the Advances in Neural Information Processing Systems, 2017: 5998-6008. |
| 29 | LOWE R, WU Y I, TAMAR A, et al. Multi-agent actor-critic for mixed cooperative-competitive environments[C]//Proc. of the Advances in Neural Information Processing Systems, 2017: 6379-6390. |
| 30 | RONNEBERGER O, FISCHER P, BROX T. U-Net: convolutional networks for biomedical image segmentation[C]//Proc. of the 18th Medical Image Computing and Computer-Assisted Intervention Conference, 2015: 234-241. |
| 31 |
TAMPUU A , MATIISEN T , KODELJA D , et al. Multiagent cooperation and competition with deep reinforcement learning[J]. PloS One, 2017, 12 (4): e0172395.
doi: 10.1371/journal.pone.0172395 |
| [1] | 孟麟芝, 孙小涓, 胡玉新, 高斌, 孙国庆, 牟文浩. 面向卫星在轨处理的强化学习任务调度算法[J]. 系统工程与电子技术, 2025, 47(6): 1917-1929. |
| [2] | 郑康洁, 张新宇, 王伟菘, 刘震生. DQN与规则结合的智能船舶动态自主避障决策[J]. 系统工程与电子技术, 2025, 47(6): 1994-2001. |
| [3] | 刘书含, 李彤, 李富强, 杨春刚. 意图态势双驱动的数据链抗干扰通信机制[J]. 系统工程与电子技术, 2025, 47(6): 2055-2064. |
| [4] | 林志康, 施龙飞, 刘甲磊, 马佳智. 基于深度Q学习的组网雷达闪烁探测调度方法[J]. 系统工程与电子技术, 2025, 47(5): 1443-1452. |
| [5] | 王子怡, 傅雄军, 董健, 冯程. 基于分层多智能体强化学习的雷达协同抗干扰策略优化[J]. 系统工程与电子技术, 2025, 47(4): 1108-1114. |
| [6] | 何肖阳, 陈小龙, 杜晓林, 苏宁远, 袁旺, 关键. 基于CBAM-Swin-Transformer迁移学习的海上微动目标分类方法[J]. 系统工程与电子技术, 2025, 47(4): 1155-1167. |
| [7] | 熊威, 张栋, 任智, 杨书恒. 面向有人/无人机协同打击的智能决策方法研究[J]. 系统工程与电子技术, 2025, 47(4): 1285-1299. |
| [8] | 马鹏, 蒋睿, 王斌, 徐盟飞, 侯长波. 基于隐式对手建模的策略重构抗智能干扰方法[J]. 系统工程与电子技术, 2025, 47(4): 1355-1363. |
| [9] | 李家宽, 冯博, 刘红亮, 叶春茂, 余继周. 基于角度引导注意力的气动目标宽带PD识别方法[J]. 系统工程与电子技术, 2025, 47(3): 807-816. |
| [10] | 唐开强, 傅汇乔, 刘佳生, 邓归洲, 陈春林. 基于深度强化学习的带约束车辆路径分层优化研究[J]. 系统工程与电子技术, 2025, 47(3): 827-841. |
| [11] | 陈夏瑢, 李际超, 陈刚, 刘鹏, 姜江. 基于异质网络的装备体系组合发展规划问题[J]. 系统工程与电子技术, 2025, 47(3): 855-861. |
| [12] | 付可, 陈浩, 王宇, 刘权, 黄健. 基于不确定性的贝叶斯策略重用方法[J]. 系统工程与电子技术, 2025, 47(2): 535-543. |
| [13] | 刘晓琳, 郭梦娇, 李卓. Dueling DQN优化下的航班延误自适应图卷积循环网络预测方法[J]. 系统工程与电子技术, 2025, 47(2): 568-579. |
| [14] | 赵万兵, 夏元清, 戴荔, 张元. 弱通信下无人潜航器事件触发一致性协同控制[J]. 系统工程与电子技术, 2025, 47(2): 591-599. |
| [15] | 刘强, 孙浩冉, 胡邓华, 张爽. 基于Vondrak-Cepek组合滤波和注意力机制加权的时间比对融合算法[J]. 系统工程与电子技术, 2025, 47(2): 673-679. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||