
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (5): 1564-1570.doi: 10.12305/j.issn.1001-506X.2026.05.12
窦凇耀( ), 陈映(), 鲁耀兵()
), 陈映(), 鲁耀兵()
收稿日期:2025-02-14
接受日期:2025-06-23
出版日期:2026-05-27
发布日期:2026-05-27
通讯作者:
陈映
E-mail:1641191627@qq.com;michelle_cy@163.com;luyaobing65@163.com
作者简介:窦凇耀(1999—),男,博士研究生,主要研究方向为雷达数据处理
Songyao DOU(), Ying CHEN(), Yaobing LU()
Received:2025-02-14
Accepted:2025-06-23
Online:2026-05-27
Published:2026-05-27
Contact:
Ying CHEN
E-mail:1641191627@qq.com;michelle_cy@163.com;luyaobing65@163.com
摘要:
针对传统单模型滤波方法无法感知空间目标机动出现的未知加速度从而导致跟踪精度下降的问题,提出一种带机动判决的改进型两段无损卡尔曼滤波跟踪方法。该跟踪方法由一个主滤波器和一个辅滤波器组成。主滤波器不考虑目标未知的加速度输入,辅滤波器从主滤波器的新息中估计目标的加速度输入。通过辅滤波器的加速度估计值感知目标的机动,当判定目标机动时,利用辅滤波器的加速度估计修正主滤波器的目标状态估计,以应对目标在特定时间段内出现的机动动作。仿真结果表明该跟踪方法能够有效地检测出目标机动并估计出目标的机动加速度,目标在机动段的跟踪精度得到了显著提升。
中图分类号:
窦凇耀, 陈映, 鲁耀兵. 基于TSUKF-MD的空间机动目标跟踪[J]. 系统工程与电子技术, 2026, 48(5): 1564-1570.
Songyao DOU, Ying CHEN, Yaobing LU. Space maneuvering target tracking based on TSUKF-MD[J]. Systems Engineering and Electronics, 2026, 48(5): 1564-1570.

图1
TSUKF-MD结构图"
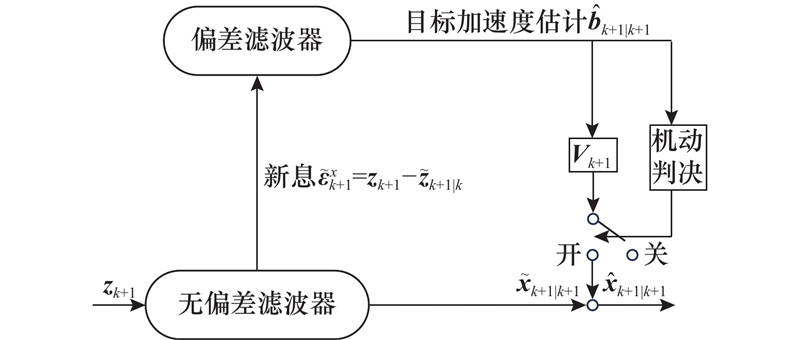
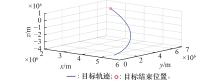
图2
目标轨迹图"
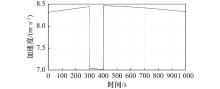
图3
目标加速度变化图"
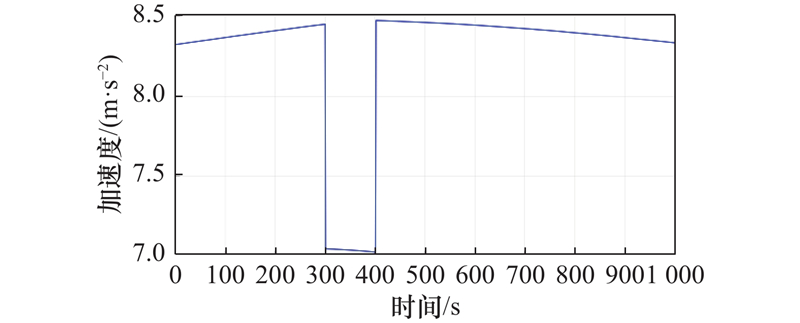
图4
目标加速度估计结果"
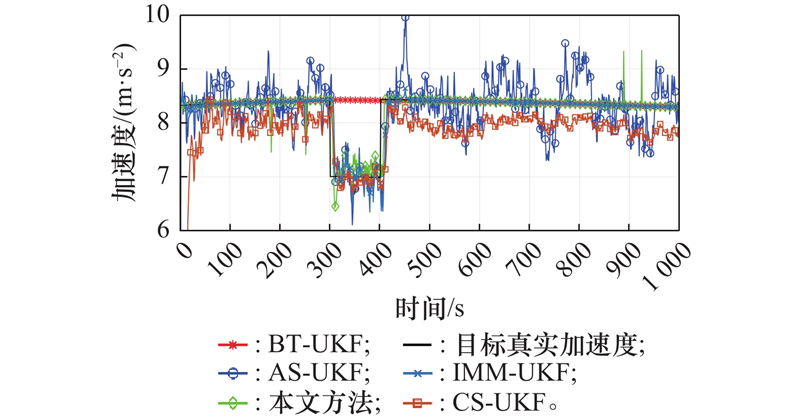
图5
目标加速度估计均方根误差"
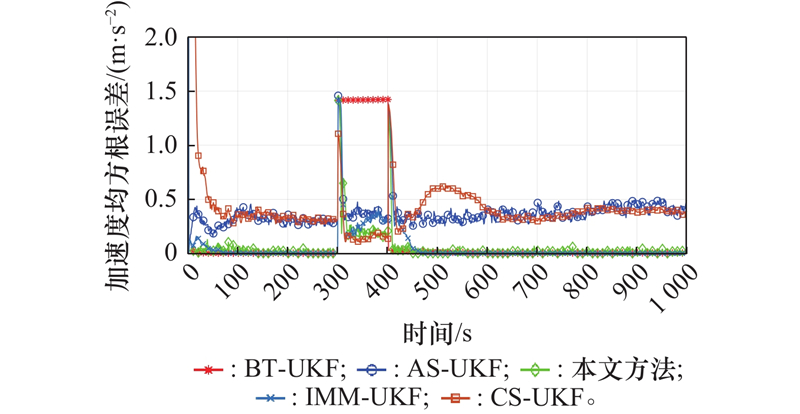

图6
IMM-UKF方法的模型概率"
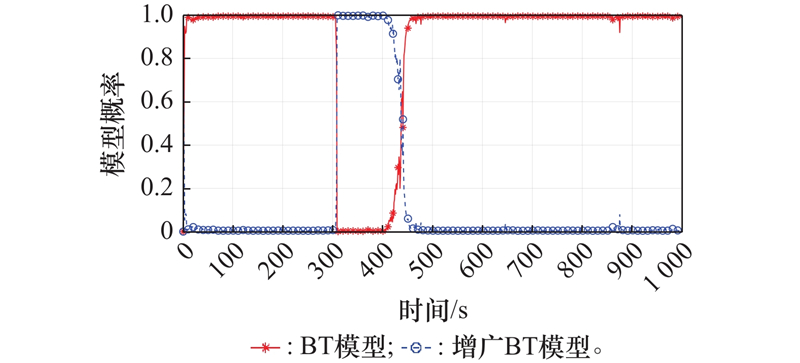
图7
目标位置估计RMSE"
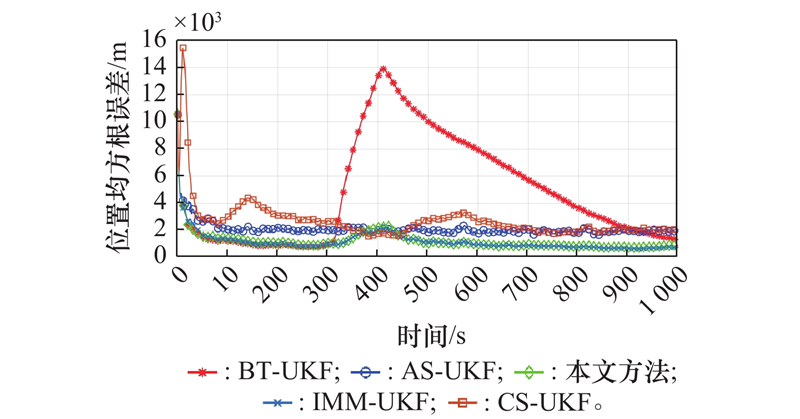
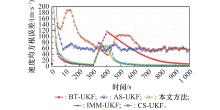
图8
目标速度估计RMSE"
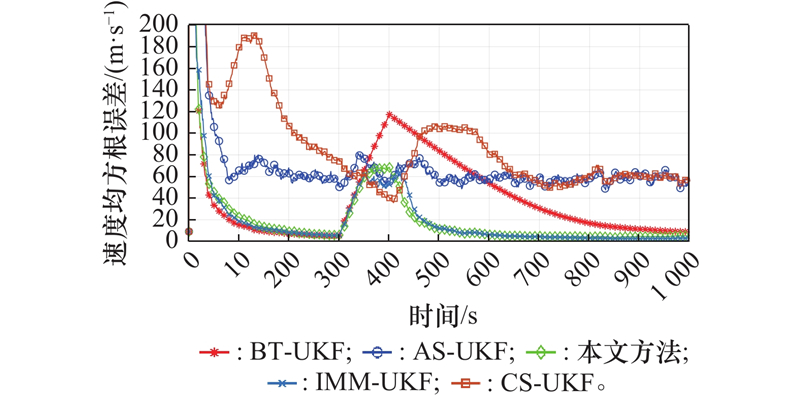
表1
不同算法的平均运行时间对比"
| 算法 | 运行时间 |
| BT-UKF | |
| AS-UKF | |
| 本文方法 | |
| IMM-UKF | |
| CS-UKF |
| 1 | HE S, WU P L, LI X X, et al. Adaptive modified unbiased minimum-variance estimation for highly maneuvering target tracking with model mismatch[J]. IEEE Trans. on Instrumentation and Measurement, 2023, 72, 8501216. |
| 2 |
尹聚祺, 杨震, 罗亚中, 等. 空间机动目标跟踪的改进自适应IMM算法[J]. 系统工程与电子技术, 2021, 43 (12): 3658- 3666.
doi: 10.12305/j.issn.1001-506X.2021.12.29 |
|
YIN J Q, YANG Z, LUO Y Z, et al. Improved adaptive IMM algorithm for space maneuvering target tracking[J]. Systems Engineering and Electronics, 2021, 43 (12): 3658- 3666.
doi: 10.12305/j.issn.1001-506X.2021.12.29 |
|
| 3 | ZHAO S H, ZENG C, LIU M. Residual-based learning efficient transformer network for maneuvering target tracking[C]//Proc. of the 7th International Conference on Information Communication and Signal Processing, 2024: 646−650. |
| 4 | FORTI N, MILLEFIORI L M, BRACA P, et al. Model-based deep learning for maneuvering target tracking[C]//Proc. of the 26th International Conference on Information Fusion, 2023. |
| 5 | ESCRIBANO BLAZQUEZ G. Maneuvering target tracking methods for space surveillance[D]. Madrid: Universidad Carlos III de Madrid, 2024. |
| 6 | ESCRIBANO G, SANJURJO R M, SIMINSKI J A, et al. A filter for tracking non-cooperative low-thrust satellites using surveillance radar data[J]. Acta Astronautica, 2023, 213: 694−707. |
| 7 | LI R, SUN C, YU X, et al. Space noncooperative target trajectory tracking based on maneuvering parameter estimation[J]. Space: Science & Technology, 2023, 3: 78. |
| 8 |
ZENG Y, LU W B, YU B T, et al. Improved IMM algorithm based on support vector regression for UAV tracking[J]. Journal of Systems Engineering and Electronics, 2022, 33 (4): 867- 876.
doi: 10.23919/JSEE.2022.000075 |
| 9 | LI W R, PAN J, LI Y J, et al. A Kalman filtering for linear discrete-time system with unknown inputs[C]//Proc. of the Chinese Control and Decision Conference, 2018: 5423−5428. |
| 10 |
CLARK D, RISTIC B, VO B N, et al. Bayesian multi-object filtering with amplitude feature likelihood for unknown object SNR[J]. IEEE Trans. on Signal Processing, 2010, 58 (1): 26- 37.
doi: 10.1109/TSP.2009.2030640 |
| 11 |
何山, 吴盘龙, 恽鹏, 等. 一种面向临近空间高超声速再入滑翔目标跟踪算法[J]. 宇航学报, 2020, 41 (5): 553- 559.
doi: 10.3873/j.issn.1000-1328.2020.05.005 |
|
HE S, WU P L, YUN P, et al. A tracking algorithm for near space hypersonic reentry glide target[J]. Journal of Astronautics, 2020, 41 (5): 553- 559.
doi: 10.3873/j.issn.1000-1328.2020.05.005 |
|
| 12 | 许登荣, 程水英, 包守亮. 一种多级助推段弹道导弹跟踪算法[J]. 宇航学报, 2016, 37 (9): 1114- 1121. |
| XU D R, CHENG S Y, BAO S L. A tracking algorithm of ballistic missile with multi-stage boosters[J]. Journal of Astronautics, 2016, 37 (9): 1114- 1121. | |
| 13 |
GILLIJNS S, DE MOOR B. Unbiased minimum-variance input and state estimation for linear discrete-time systems with direct feedthrough[J]. Automatica, 2007, 43 (5): 934- 937.
doi: 10.1016/j.automatica.2006.11.016 |
| 14 |
JIANG Y, BAOYIN H, MA P. Augmented unbiased minimum-variance input and state estimation for tracking a maneuvering satellite[J]. Acta Astronautica, 2019, 163, 96- 107.
doi: 10.1016/j.actaastro.2018.11.015 |
| 15 | 张凯, 熊家军, 付婷婷, 等. 基于耦合气动参数的HGV多模型估计[J]. 北京航空航天大学学报, 2018, 44 (10): 2156- 2164. |
| ZHANG K, XIONG J J, FU T T, et al. Multi-model estimation of HGV based on coupled aerodynamic parameters[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44 (10): 2156- 2164. | |
| 16 | 张裕禄, 毕红葵, 叶泽浩, 等. 临近空间高超声速再入滑翔目标跟踪模型[J]. 空军工程大学学报(自然科学版), 2019, 20 (5): 33- 39. |
| ZHANG Y L, BI H K, YE Z H, et al. Target tracking model for hypersonic reentry-glide vehicle in near space[J]. Journal of Air Force Engineering University (Natural Science Eition), 2019, 20 (5): 33- 39. | |
| 17 |
FRIEDLAND B. Treatment of bias in recursive filtering[J]. IEEE Trans. on Automatic Control, 1969, 14 (4): 359- 367.
doi: 10.1109/TAC.1969.1099223 |
| 18 |
IGNAGNI M. An alternate derivation and extension of Friendland’s two-stage Kalman estimator[J]. IEEE Trans. on Automatic Control, 1981, 26 (3): 746- 750.
doi: 10.1109/TAC.1981.1102697 |
| 19 |
MENDEL J. Extension of Friedland’s bias filtering technique to a class of nonlinear systems[J]. IEEE Trans. on Automatic Control, 1976, 21 (2): 296- 298.
doi: 10.1109/TAC.1976.1101201 |
| 24 |
ZHOU D H, SU Y X, XI Y G, et al. Extension of Friedland’s separate-bias estimation to randomly time-varying bias of nonlinear systems[J]. IEEE Trans. on Automatic Control, 1993, 38 (8): 1270- 1273.
doi: 10.1109/9.233167 |
| 25 |
KIM K H, LEE J G, PARK C G. Adaptive two-stage Kalman filter in the presence of unknown random bias[J]. International Journal of Adaptive Control and Signal Processing, 2006, 20 (7): 305- 319.
doi: 10.1002/acs.900 |
| 26 |
HOU D C, SUN Y H, DINAVAHI V, et al. Adaptive two-stage unscented kalman filter for dynamic state estimation of synchronous generator under cyber attacks against measurements[J]. Journal of Modern Power Systems and Clean Energy, 2024, 12 (5): 1408- 1418.
doi: 10.35833/MPCE.2023.000352 |
| 27 |
REZAEI O, RAHDAN A, SARDARI S, et al. A fuzzy robust two-stage unscented Kalman filter method for uncertainty and state of charge estimation of lithium-ion batteries[J]. Journal of Energy Storage, 2023, 68, 107883.
doi: 10.1016/j.est.2023.107883 |
| 28 |
IGNAGNI M. Optimal and suboptimal separate-bias Kalman estimators for a stochastic bias[J]. IEEE Trans. on Automatic Control, 2000, 45 (3): 547- 551.
doi: 10.1109/9.847741 |
| 29 |
HSIEH C S, CHEN F C. Optimal solution of the two-stage Kalman estimator[J]. IEEE Trans. on Automatic Control, 1999, 44 (1): 194- 199.
doi: 10.1109/9.739135 |
| 30 |
HSIEH C S. Robust two-stage Kalman filters for systems with unknown inputs[J]. IEEE Trans. on Automatic Control, 2000, 45 (12): 2374- 2378.
doi: 10.1109/9.895577 |
| 31 | ALOUANI A T, XIA P, RICE T R, et al. Two-stage Kalman estimator for tracking maneuvering targets[C]//Proc. of the IEEE International Conference on Systems, Man, and Cybernetics, 1991: 761−766. |
| 32 | BLAIR W D, WATSON G A. Interacting multiple bias model algorithm with application to tracking maneuvering targets[C]//Proc. of the 31st IEEE Conference on Decision and Control, 1992: 3790−3795. |
| 33 |
WATSON G A, BLAIR W D. Interacting acceleration compensation algorithm for tracking maneuvering targets[J]. IEEE Trans. on Aerospace and Electronic Systems, 1995, 31 (3): 1152- 1159.
doi: 10.1109/7.395225 |
| 34 | 任家栋, 曾庆双, 朱虹. 自适应TSKF的空间电推进机动目标跟踪[J]. 哈尔滨工业大学学报, 2018, 50 (4): 36- 40. |
| REN J D, ZENG Q S, ZHU H. Tracking of space electric-propulsion maneuvering target based on adaptive two-stage Kalman filter[J]. Journal of Harbin Institute of Technology, 2018, 50 (4): 36- 40. | |
| 20 | CHEN X Q, SUN R, WANG F, et al. Two-stage unscented Kalman filter algorithm for fault estimation in spacecraft attitude control system[J]. IET Control Theory & Applications, 2018, 12 (13): 1781- 1791. |
| 21 | XU J H, JING Y W, DIMIROVSKI G M, et al. Two-stage unscented Kalman filter for nonlinear systems in the presence of unknown random bias[C]//Proc. of the American Control Conference, 2008: 3530−3535. |
| 22 |
ZHANG L, BAGWARI A, ZHANG L, et al. Target tracking algorithm using two-stage cubature Kalman filter[J]. Journal of Intelligent Systems and Control, 2023, 2 (4): 230- 245.
doi: 10.56578/jisc020405 |
| 23 |
WANG J L, MA X B, ZHANG Y B, et al. Constrained two-stage Kalman filter for real-time state estimation of systems with time-varying measurement noise covariance[J]. ISA Transactions, 2022, 129, 336- 344.
doi: 10.1016/j.isatra.2021.12.041 |
| [1] | 梁雨凡, 陈映, 李鑫, 窦凇耀. 基于ACT和Bi-LSTM的多模型交互跟踪算法[J]. 系统工程与电子技术, 2026, 48(6): 1869-1879. |
| [2] | 刘泽为, 庄鹏, 郑岱堃, 袁俊泉, 马晓岩. 基于航迹随机集的多目标自适应航迹整体估计算法[J]. 系统工程与电子技术, 2026, 48(6): 1893-1904. |
| [3] | 杨泽莹, 陈卓, 徐志明, 艾小锋, 吴其华, 王玲. 空间目标ISAR图像部件正向标记方法[J]. 系统工程与电子技术, 2026, 48(4): 1165-1173. |
| [4] | 程鲲, 雷洪涛, 吕志轩. 改进YOLOv8的轻量级无人机跟踪方法[J]. 系统工程与电子技术, 2026, 48(3): 737-750. |
| [5] | 李翠芸, 赵泽宇, 张双武. 重尾噪声环境下的自适应TPMBM滤波器[J]. 系统工程与电子技术, 2025, 47(9): 2808-2817. |
| [6] | 傅嘉政, 郭玉霞, 张博祥, 柴雷, 易伟, 孔令讲. 基于TPHD与TCPHD滤波器的分布式多目标跟踪方法[J]. 系统工程与电子技术, 2025, 47(9): 2828-2838. |
| [7] | 马晓萌, 邓东明, 沈永健, 丁金闪, 郝国卿. 基于单站无源运动定位的多目标跟踪方法[J]. 系统工程与电子技术, 2025, 47(8): 2549-2557. |
| [8] | 周晓, 牟新刚, 柯文, 苏盈, 王丽. 自适应IMM-UKF机动目标跟踪算法[J]. 系统工程与电子技术, 2025, 47(8): 2686-2695. |
| [9] | 孙一心, 方愚渊, 张磊. 战术机动先验辅助的交互多模型目标跟踪方法[J]. 系统工程与电子技术, 2025, 47(7): 2086-2097. |
| [10] | 张洪源, 龚柏春, 韩飞, 孙玥, 宁昕. 复杂环境下天基无源协同多目标初始定轨方法[J]. 系统工程与电子技术, 2025, 47(5): 1404-1413. |
| [11] | 闫咏琪, 王琪, 易凡. 交互式多模型概率数据关联抗速度拖引干扰算法[J]. 系统工程与电子技术, 2025, 47(5): 1507-1515. |
| [12] | 刘文岚, 王德伍, 戴金辉, 安强, 窦凇耀. 面向保精度跟踪的主被动雷达网络联合功率分配与节点优选算法[J]. 系统工程与电子技术, 2025, 47(12): 4110-4116. |
| [13] | 郑舒予, 杨庆伟, 蒋李兵, 王壮. 面向预警监视任务的天基雷达研究进展[J]. 系统工程与电子技术, 2025, 47(10): 3199-3217. |
| [14] | 尚李娜, 董玫, 陈伯孝. 非均匀杂波环境下的低空多目标跟踪算法[J]. 系统工程与电子技术, 2025, 47(10): 3218-3227. |
| [15] | 潘超凡, 李润生, 胡庆, 包全福, 保永强. 基于惯性预测的遥感场景舰船多目标跟踪模型[J]. 系统工程与电子技术, 2025, 47(1): 41-51. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||