
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (6): 1869-1879.doi: 10.12305/j.issn.1001-506X.2026.06.09
梁雨凡( ), 陈映(), 李鑫, 窦凇耀
), 陈映(), 李鑫, 窦凇耀
收稿日期:2025-02-25
修回日期:2025-06-13
接受日期:2025-07-17
出版日期:2026-06-25
发布日期:2026-03-21
通讯作者:
陈映
E-mail:1328937716@qq.com;michelle_cy@163.com
作者简介:梁雨凡(2000—),女,硕士研究生,主要研究方向为雷达数据处理
Yufan LIANG(), Ying CHEN(), Xin LI, Songyao DOU
Received:2025-02-25
Revised:2025-06-13
Accepted:2025-07-17
Online:2026-06-25
Published:2026-03-21
Contact:
Ying CHEN
E-mail:1328937716@qq.com;michelle_cy@163.com
摘要:
面对具有高机动特性无人机等气动目标,传统基于固定运动模型的目标跟踪算法在应对目标的复杂运动模式时,常因模型失配导致跟踪精度下降甚至目标丢失。针对这一问题,提出一种基于自适应转弯(adaptive coordinated turn,ACT)模型和双向长短时记忆(bidirectional long short-term memory,Bi-LSTM)网络的多模型交互跟踪算法。通过Bi-LSTM网络学习历史观测数据与目标运动状态之间的非线性关系,实现对目标转弯率的精确辨识;基于数据-模型混合驱动的思想,将神经网络的预测结果与交互多模型ACT(interacting multiple model-ACT,IMM-ACT)滤波算法相结合,有效提升算法在目标运动模式切换时的响应能力。实验结果表明,所提算法在目标运动模式多样化及高频切换场景下具有较高的跟踪精度,显著提升机动目标跟踪的稳定性和连续性,为机动目标跟踪提供了新的解决方案。
中图分类号:
梁雨凡, 陈映, 李鑫, 窦凇耀. 基于ACT和Bi-LSTM的多模型交互跟踪算法[J]. 系统工程与电子技术, 2026, 48(6): 1869-1879.
Yufan LIANG, Ying CHEN, Xin LI, Songyao DOU. Multi-model interaction tracking algorithm based on ACT and Bi-LSTM[J]. Systems Engineering and Electronics, 2026, 48(6): 1869-1879.
表1
网络训练数据生成"
| 参数 | 参数值 |
| CV目标数 | |
| CT目标数 | |
| CA目标数 | |
| 跟踪时长/s | 300 |
| 采样间隔T/s | 1 |
| 距离范围/km | |
| 速度范围/(m/s) | |
| 转弯率范围/(°/s) | |
| 距离噪声标准差/m | |
| 加速度噪声标准差/( | |
| 方位角噪声标准差/(°) |

图1
神经网络输入序列的处理"
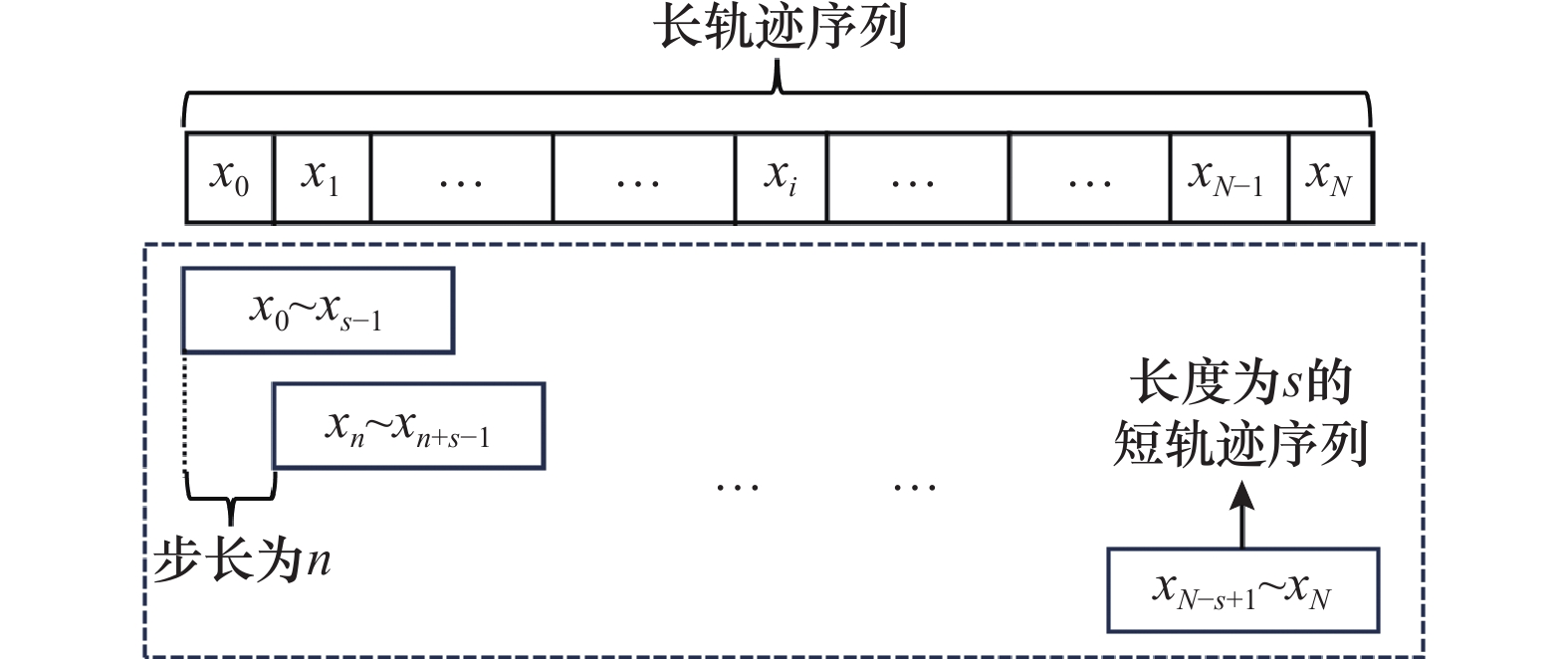

图2
基于Bi-LSTM网络转弯率辨识模型"
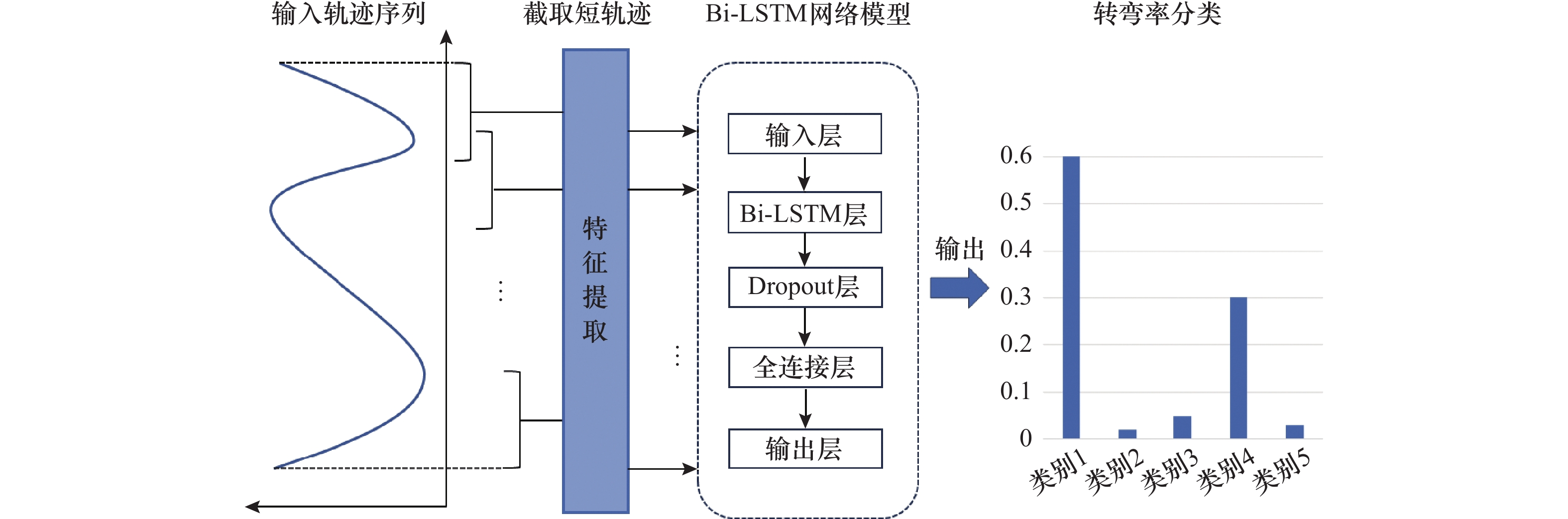
表2
Bi-LSTM网络模型超参数设置"
| 参数 | 参数值 | 说明 |
| input_size | 2 | 每个时间步的输入维度 |
| hidden_size | 128 | LSTM隐藏状态的维度 |
| output_size | n | 分类的类别数 |
| num_layers | 2 | LSTM的层数 |
| dropout | 0.3 | 随机丢弃比例 |
| batch_size | 64 | 每次训练的样本数量 |
| lr | 0.001 | Adam优化器的学习率 |
图3
网络的训练损失变化曲线"
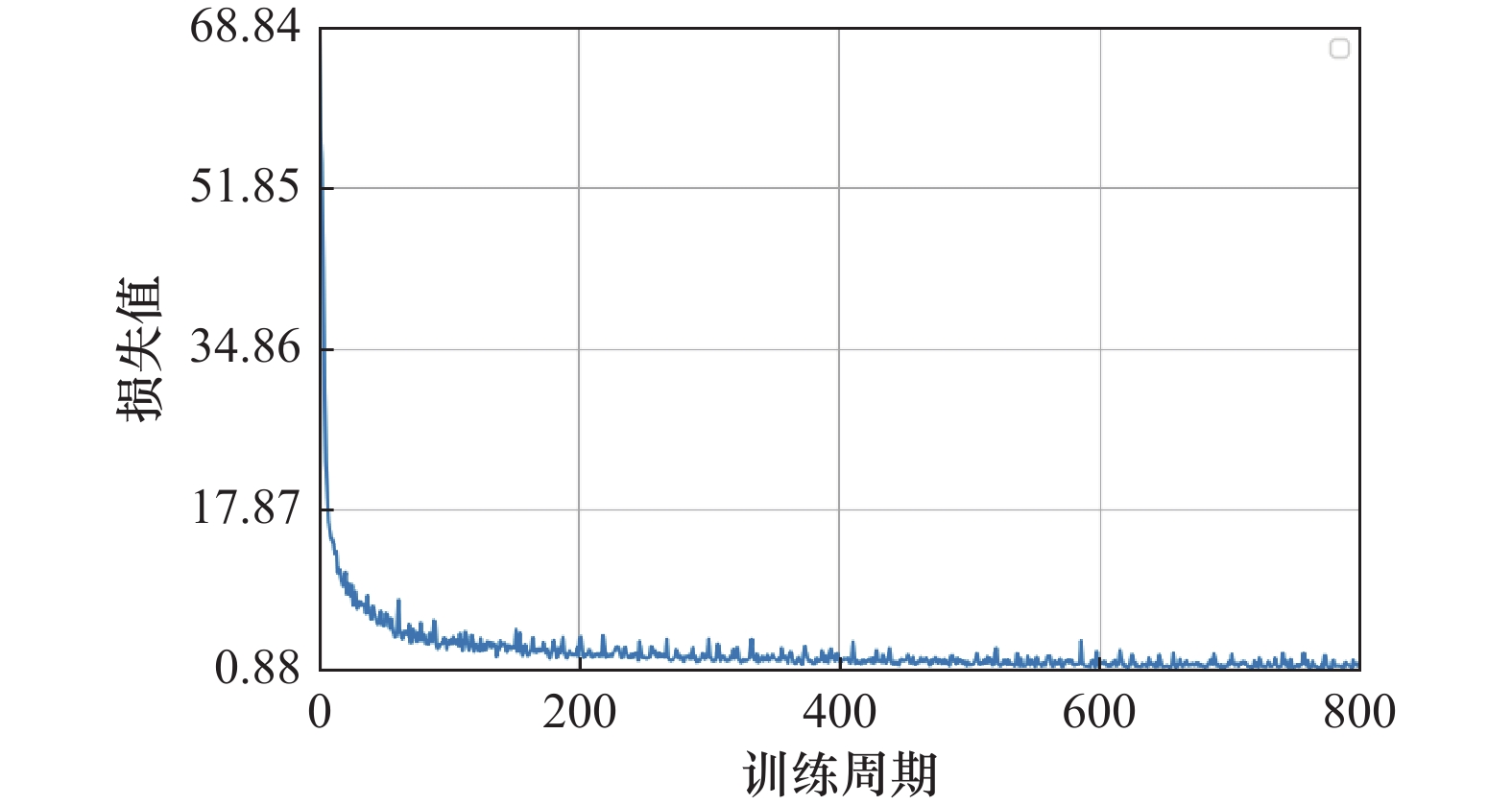

图4
本文算法框架图"
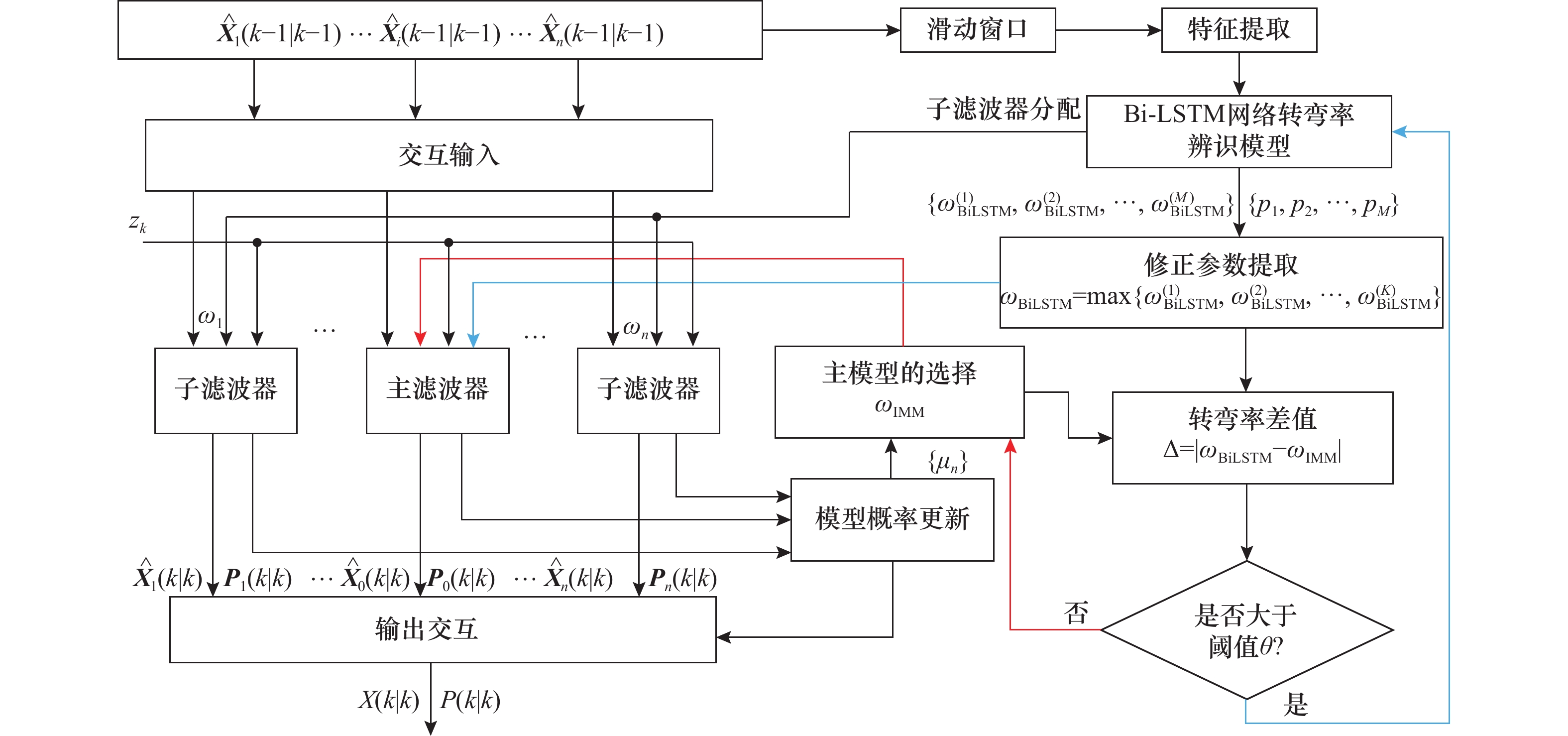
表3
目标运动轨迹描述"
| 轨迹编号 | 初始状态 | 起始时刻/s | 终止时刻/s |
| A | 1 | 100 | |
| B | 101 | 150 | |
| C | 151 | 190 |
图5
目标运动轨迹"
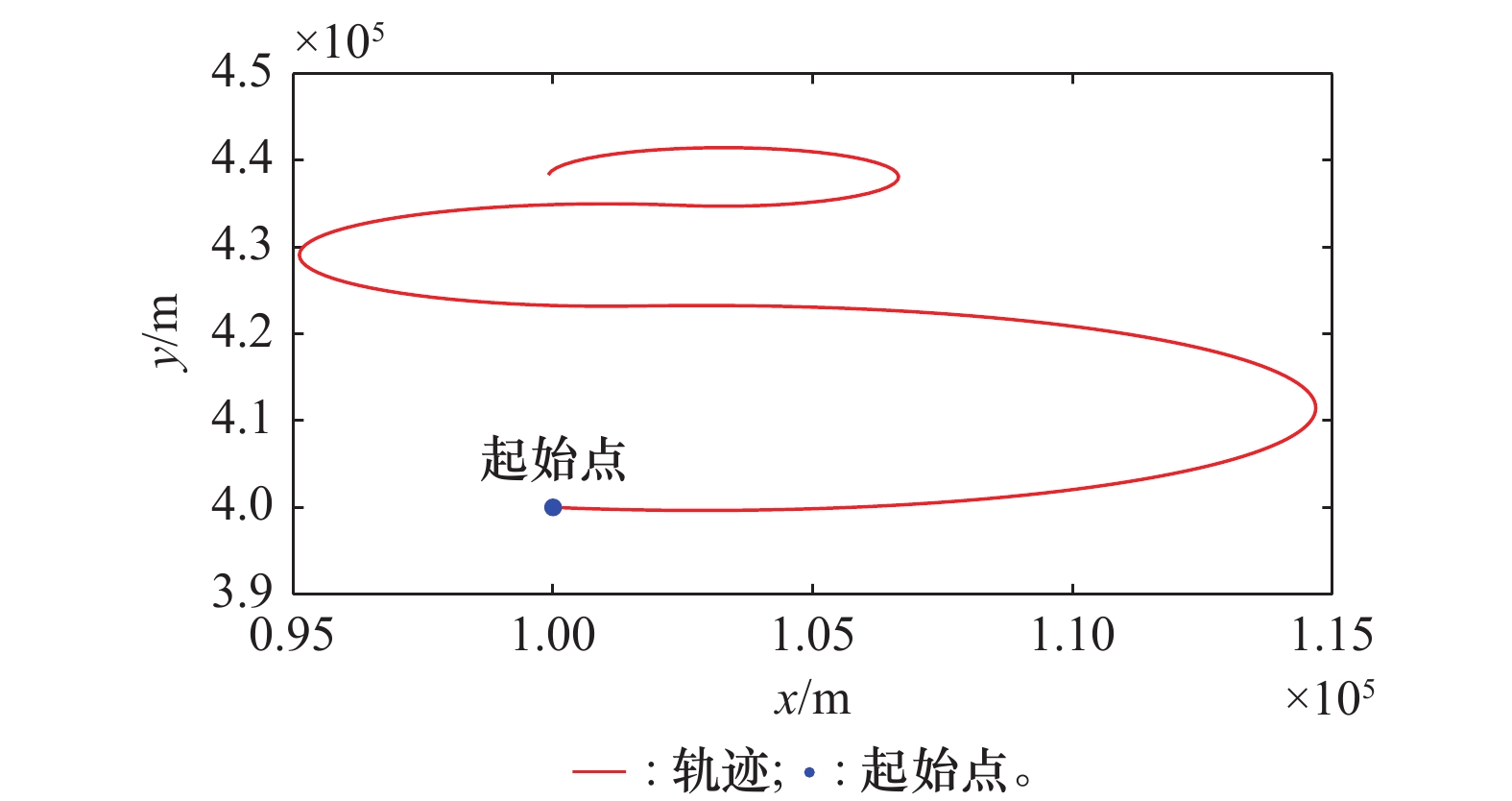
表4
仿真实验的仿真参数"
| 参数 | 参数值 |
| 跟踪时长 | 190 |
| 采样间隔 | 1 |
| 覆盖概率 | 70 |
| 最大转弯率 | 10 |

图6
转弯率实时对比图"
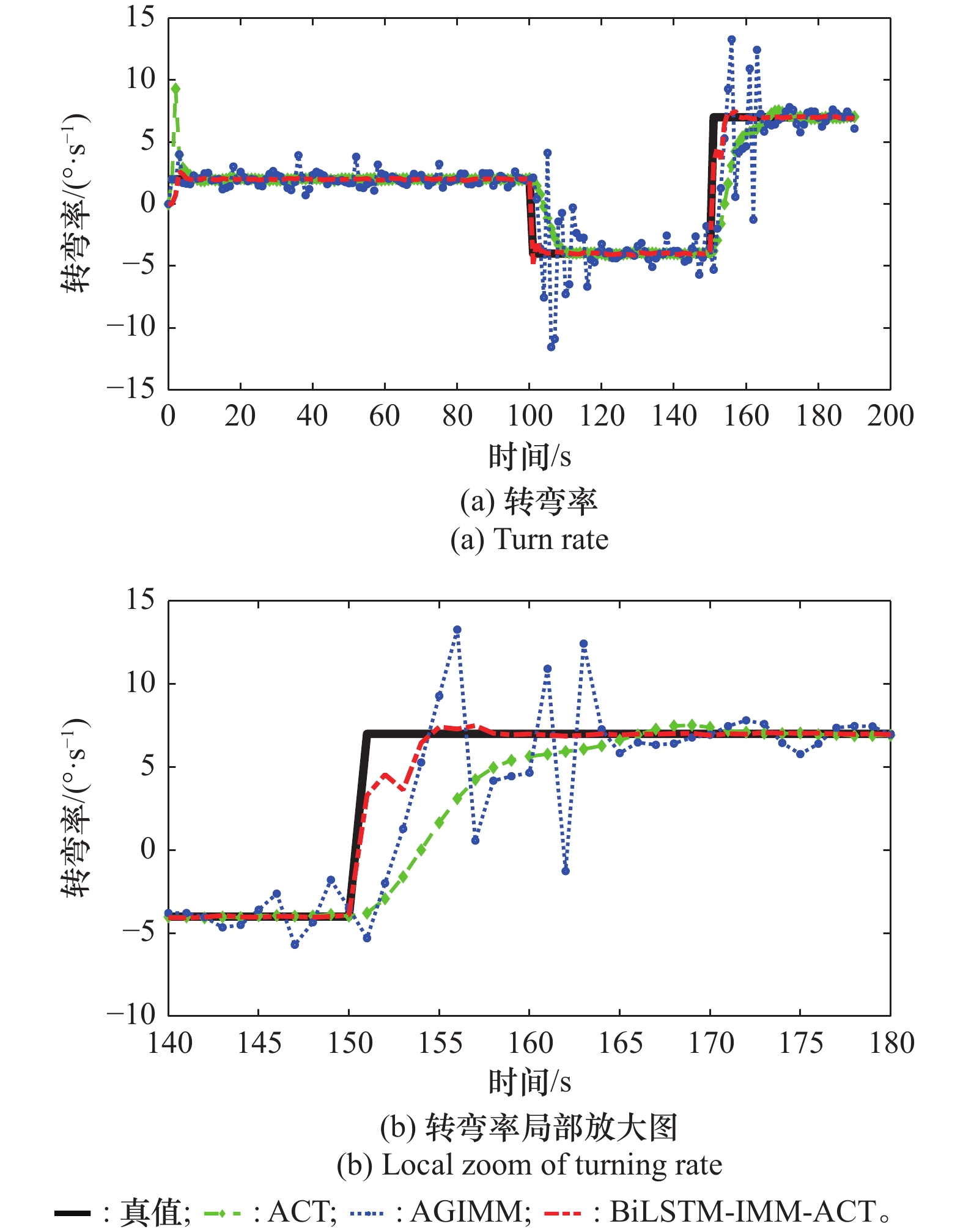
图7
位置RMSE对比"
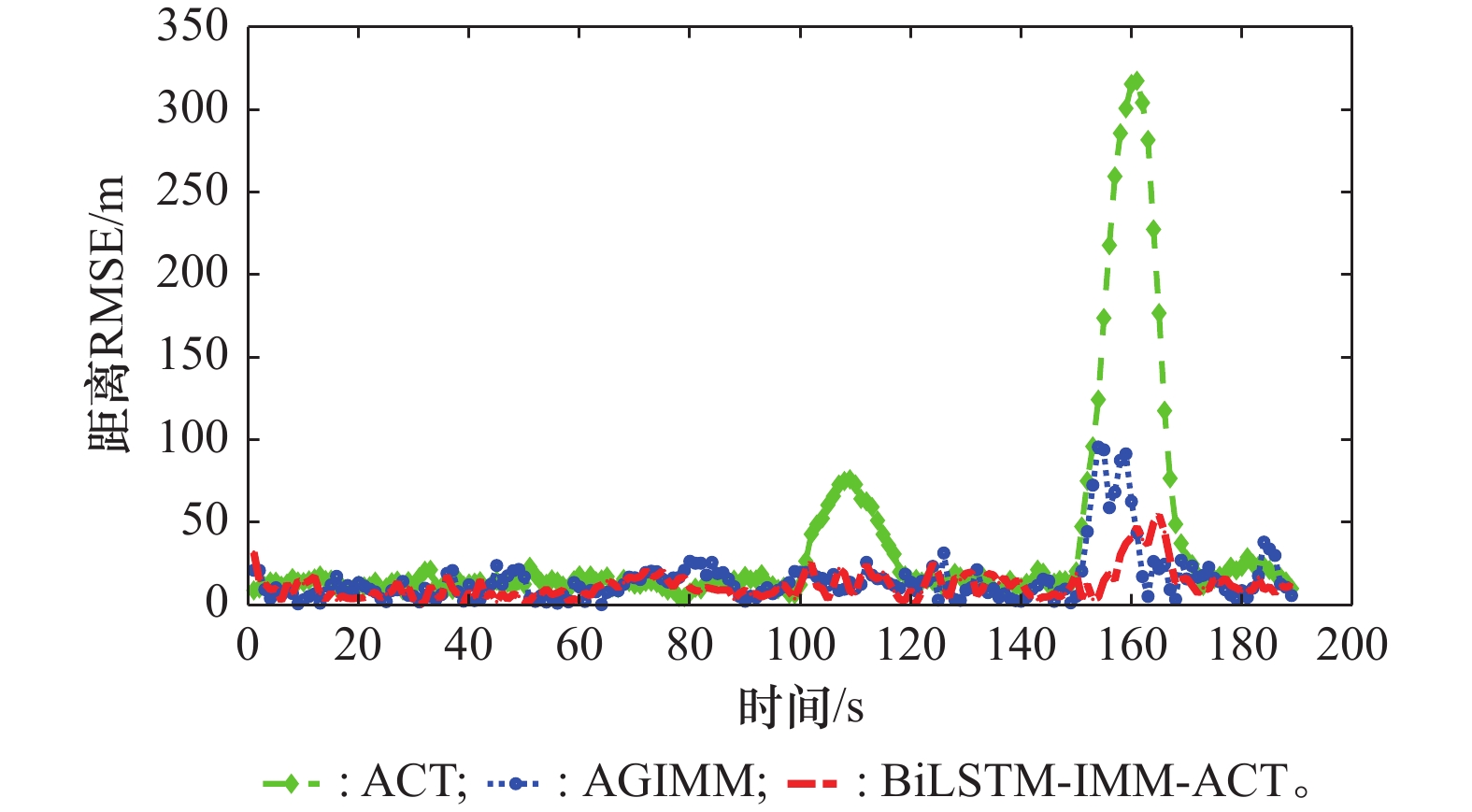
图8
速度RMSE对比"
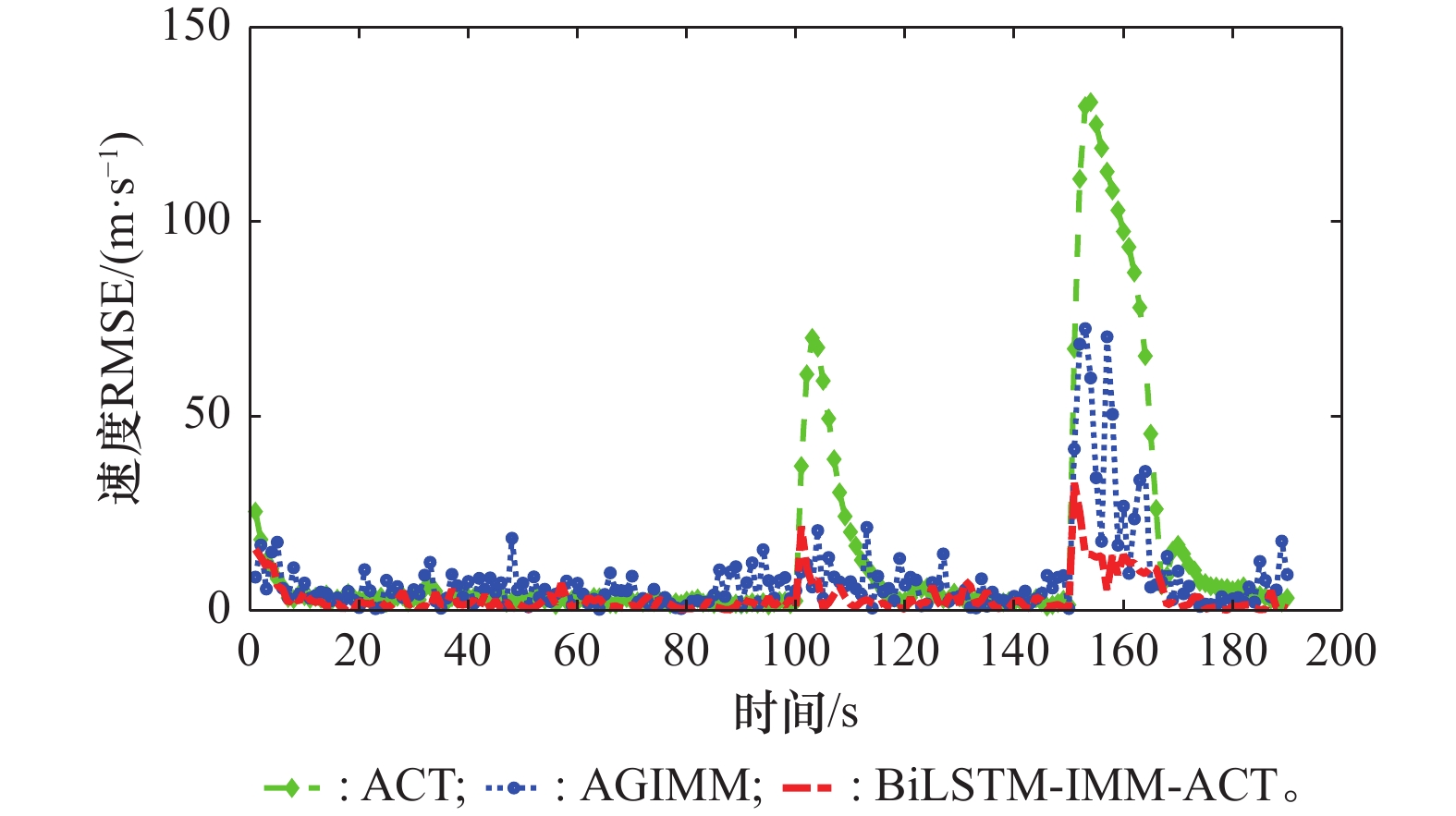
表5
ARMSE对比"
| 算法 | 位置/m | 速度/(m/s) |
| ACT | 34.87 | 14.85 |
| AGIMM | 15.15 | 8.16 |
| BiLSTM-IMM-ACT | 11.92 | 3.41 |
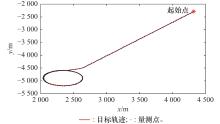
图9
雷达量测轨迹"
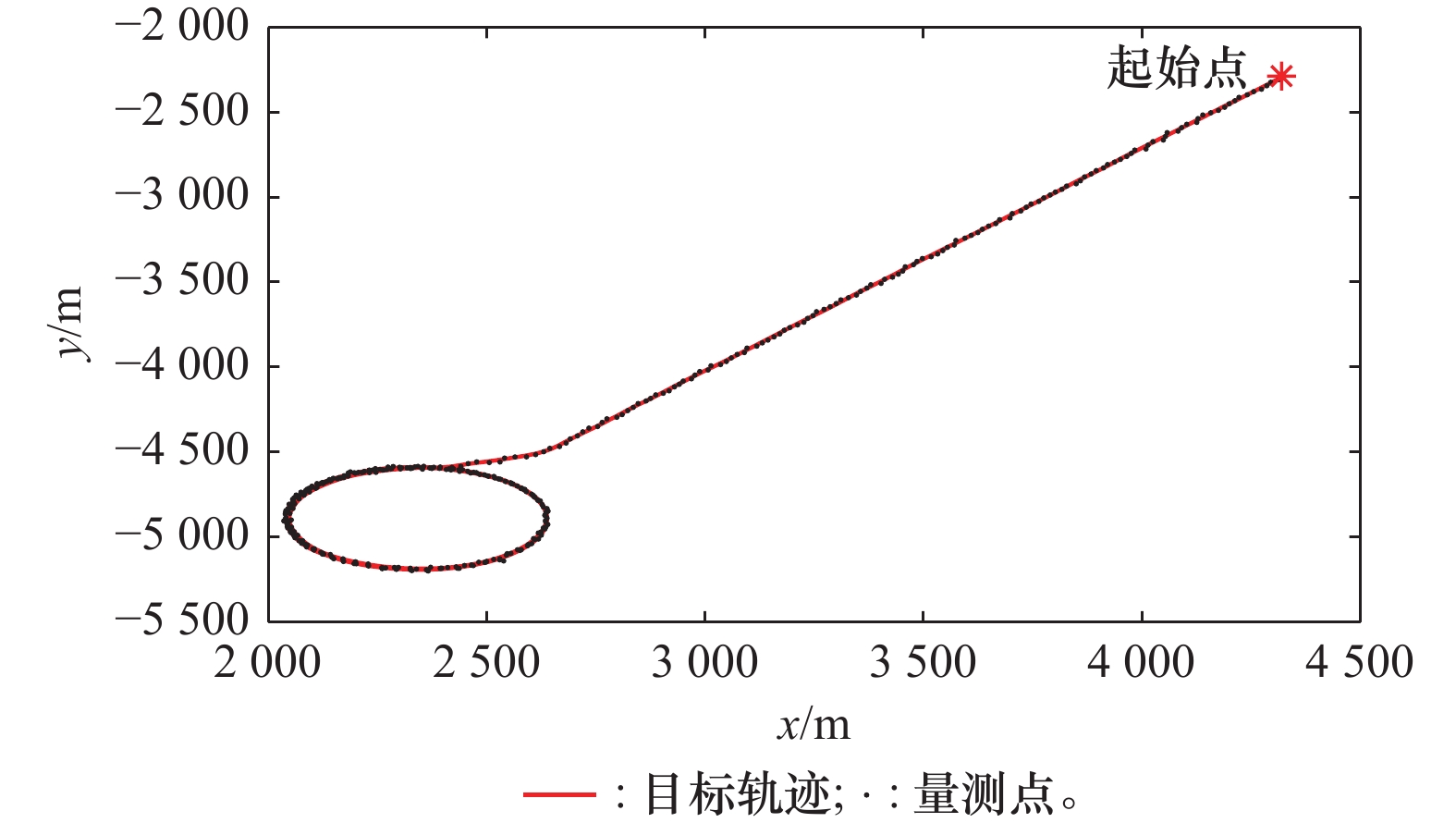
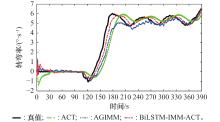
图10
转弯率对比图"
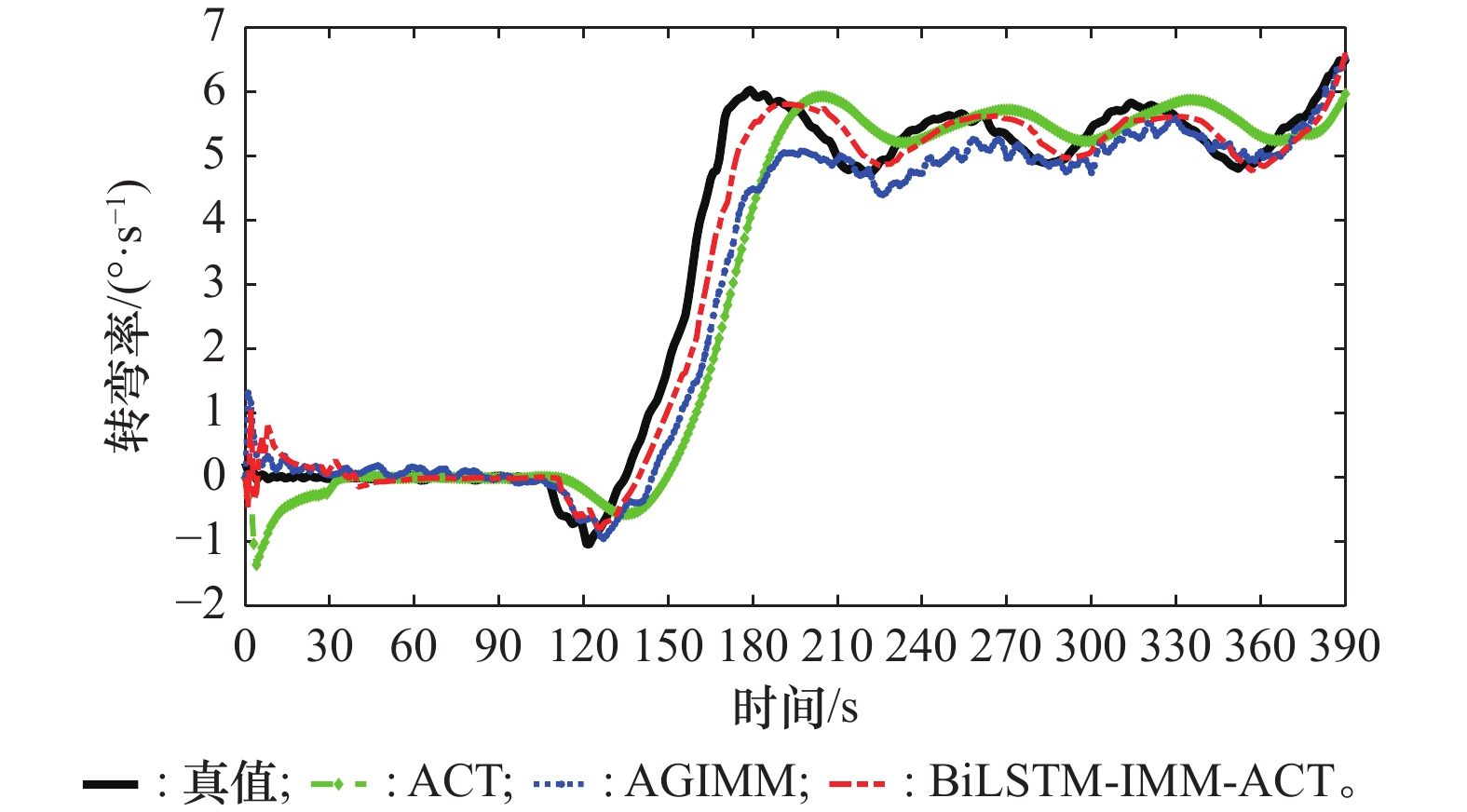
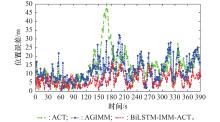
图11
位置误差"
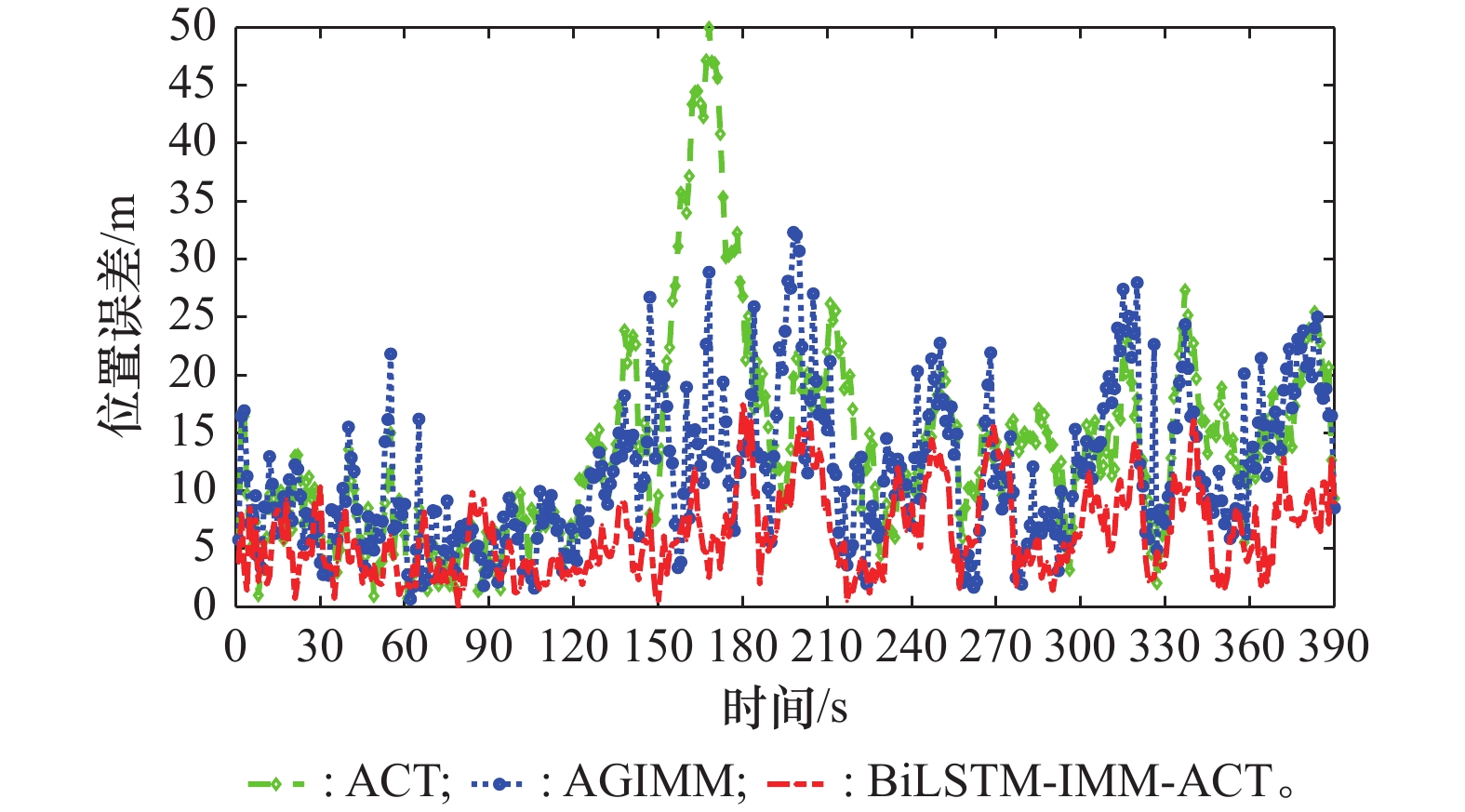
图12
速度误差"
表6
误差对比"
| 算法 | 位置/m | 速度/(m/s) |
| ACT | 13.57 | 4.93 |
| AGIMM | 11.33 | 5.34 |
| BiLSTM-IMM-ACT | 6.30 | 3.18 |
| 17 | BECKER S, HUG R, HUBNER W, et al. An RNN-based IMM filter surrogate[C]//Proc. of the Scandinavian Conference on Image Analysis, 2019: 387−398. |
| 18 | DENG L, LI D, LI R. Improved IMM algorithm based on RNNs[C]//Journal of Physics: Conference Series. IOP Publishing, 2020, 1518(1): 012055. |
| 19 | 马云红, 李欣怡, 王泽霖, 等. 基于数据驱动的机动目标跟踪[J]. 航空科学技术, 2024, 35 (4): 97- 103. |
| MA Y H, LI X Y, WANG Z L, et al. Maneuvering target tracking based on data-driven[J]. Aeronautical Science and Technology, 2024, 35 (4): 97- 103. | |
| 20 | LIU B, SHI Q, HAN P. Short-term 4D trajectory prediction method based on LSTM-IMM[C]// Proc. of the IEEE Conference on Digital Avionics Systems, 2022. |
| 21 |
TIAN W, FANG L, LI W, et al. Deep-learning-based multiple model tracking method for targets with complex maneuvering motion[J]. Remote Sensing, 2022, 14 (14): 3276.
doi: 10.3390/rs14143276 |
| 22 | JOUABER S, BONNABEL S, VELASCO-FORERO S, et al. NNAKF: a neural network adapted Kalman filter for target tracking[C]//Proc. of the ICASSP IEEE International Conference on Acoustics, Speech and Signal Processing, 2021: 4075−4079. |
| 23 | SUN M, MA Z, LI Y. Maneuvering target tracking using IMM Kalman filter aided by Elman neural network[C]//Proc. of the 7th International Conference on Intelligent Human-Machine Systems and Cybernetics, 2015, 1: 144−148. |
| 24 | 王纯鑫. 结合数据驱动的雷达目标跟踪方法研究[D]. 西安: 西安电子科技大学, 2022. |
| WANG C X. Research on radar target tracking method combined with data-driven [D]. Xi’an: Xidian University, 2022. | |
| 25 |
SHRESTHA A, LI H, LE KERNEC J, et al. Continuous human activity classification from FMCW radar with Bi-LSTM networks[J]. IEEE Sensors Journal, 2020, 20 (22): 13607- 13619.
doi: 10.1109/JSEN.2020.3006386 |
| 26 |
BLOM H A P, BAR-SHALOM Y. The interacting multiple model algorithm for systems with Markovian switching coefficients[J]. IEEE Trans. on Automatic Control, 1988, 33 (8): 780- 783.
doi: 10.1109/9.1299 |
| 1 | WU Y, LIM J, YANG M H. Online object tracking: a benchmark[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2013: 2411−2418. |
| 2 | 丁鹭飞, 耿富录, 陈建春. 雷达原理[M]. 陕西: 西安电子科技大学出版社, 2013. |
| DING L F, GENG F L, CHEN J C. Radar principles[M]. Xi’an: Xidian University Press, 2013. | |
| 3 | 周宏仁, 敬忠良, 王德培. 机动目标跟踪[M]. 北京: 国防工业出版社, 1991. |
| ZHOU H R, JING Z L, WANG D P. Maneuvering target tracking[M]. Beijing: National Defense Industry Press, 1991. | |
| 4 | 姜尚, 魏波, 梁伟阁, 等. 考虑齿隙的多约束导引控制一体化设计方法[J]. 系统工程与电子技术, 2022, 44 (4): 1318- 1328. |
| JIANG S, WEI B, LIANG W G, et al. Integrated guidance and control design method with multiple constraints and backlash[J]. Systems Engineering and Electronics, 2022, 44 (4): 1318- 1328. | |
| 5 |
梁津鑫, 唐奇, 崔颢, 等. 强跟踪容积卡尔曼滤波在空空导弹制导中的应用[J]. 航空兵器, 2024, 31 (5): 82- 87.
doi: 10.12132/ISSN.1673-5048.2024.0004 |
|
LIANG J X, TANG Q, CUI H, et al. Application of strong tracking cubature Kalman filter in air-to-air missile guidance[J]. Aero Weaponry, 2024, 31 (5): 82- 87.
doi: 10.12132/ISSN.1673-5048.2024.0004 |
|
| 6 | LI S J, LEI H M, SHAO L, et al. Multiple model tracking for hypersonic gliding vehicles with aerodynamic modeling and analysis[J]. IEEE Access, 2019, 7 (1): 28011- 28018. |
| 7 | 冯树林, 郭杰, 唐胜景. 一种改进的高超声速滑翔目标跟踪方法[J]. 飞行力学, 2023, 41 (5): 74- 80. |
| FENG S L, GUO J, TANG S J. An improved hypersonic gliding target tracking method[J]. Flight Dynamics, 2023, 41 (5): 74- 80. | |
| 8 |
PETRIDIS V, KEHAGIAS A. A multi-model algorithm for parameter estimation of time varying nonlinear systems[J]. Automatica, 1998, 34 (4): 469- 475.
doi: 10.1016/S0005-1098(97)00203-3 |
| 9 |
陈维义, 何凡, 刘国强, 等. 一种自适应变结构交互式多模型算法[J]. 火力与指挥控制, 2023, 48 (12): 177- 183.
doi: 10.3969/j.issn.1002-0640.2023.12.027 |
|
CHEN W Y, HE F, LIU G Q, et al. An adaptive variable structure interacting multiple model algorithm[J]. Fire Control and Command Control, 2023, 48 (12): 177- 183.
doi: 10.3969/j.issn.1002-0640.2023.12.027 |
|
| 10 | MONDAL B, PANAKKAL V P, VELMURUGAN R, et al. IMM filtering with randomized turn rate to track maneuvering target[C]// Proc. of the IEEE Aerospace Conference, 2024. |
| 11 | NDIKUMANA A, TRAN N H, KIM D H, et al. Deep learning based caching for self-driving cars in multi-access edge computing[J]. IEEE Trans. on Intelligent Transportation Systems, 2020, 22 (5): 2682- 2877. |
| 12 | 王俊, 郑彤, 雷鹏, 等. 深度学习在雷达中的研究综述[J]. 雷达学报, 2018, 7 (4): 395- 411. |
| WANG J, ZHENG T, LEI P, et al. Survey on deep learning in radar[J]. Journal of Radars, 2018, 7 (4): 395- 411. | |
| 13 | LIU Z, WANG Z, YANG Y, et al. A data-driven maneuvering target tracking method aided with partial models[J]. IEEE Trans. on Vehicular Technology, 2023, 73 (1): 414- 425. |
| 14 |
朱洪峰, 熊伟, 崔亚奇, 等. 新的自适应转弯模型的IMM算法研究[J]. 计算机工程与应用, 2019, 55 (17): 252- 258.
doi: 10.3778/j.issn.1002-8331.1805-0351 |
|
ZHU H F, XIONG W, CUI Y Q, et al. Research on IMM algorithm of new adaptive turning model[J]. Computer Engineering and Applications, 2019, 55 (17): 252- 258.
doi: 10.3778/j.issn.1002-8331.1805-0351 |
|
| 15 |
GAO C, YAN J K, ZHOU S H, et al. Long short-term memory-based deep recurrent neural networks for target tracking[J]. Information Sciences, 2019, 502, 279- 296.
doi: 10.1016/j.ins.2019.06.039 |
| 16 |
LIU J, WANG Z, XU M. Deep MTT: a deep learning maneuvering target-tracking algorithm based on bidirectional LSTM network[J]. Information Fusion, 2020, 53, 289- 304.
doi: 10.1016/j.inffus.2019.06.012 |
| 27 |
张彪, 孙超军, 徐嘉辉, 等. 自适应CT模型的强跟踪CKF算法[J]. 舰船电子工程, 2024, 44 (2): 104- 108.
doi: 10.3969/j.issn.1672-9730.2024.02.022 |
|
ZHANG B, SUN C J, XU J H, et al. Strong tracking CKF algorithm based on adaptive CT model[J]. Ship Electronic Engineering, 2024, 44 (2): 104- 108.
doi: 10.3969/j.issn.1672-9730.2024.02.022 |
|
| 28 | 杨建秀. 无人机视角下车辆目标检测的算法研究[D]. 西安: 西安电子科技大学, 2021. |
| YANG J X. Research on algorithm of vehicle target detection from human-machine perspective [D]. Xi’an: Xidian University, 2021. | |
| 29 | 秦雷, 李君龙, 周荻. 基于AGIMM的临近空间机动目标跟踪滤波算法[J]. 系统工程与电子技术, 2015, 37 (5): 1009- 1014. |
| QIN L, LI J L, ZHOU D. Filtering algorithm for maneuvering target tracking in near space based on AGIMM[J]. Systems Engineering and Electronics, 2015, 37 (5): 1009- 1014. |
| [1] | 孙一心, 方愚渊, 张磊. 战术机动先验辅助的交互多模型目标跟踪方法[J]. 系统工程与电子技术, 2025, 47(7): 2086-2097. |
| [2] | 闫咏琪, 王琪, 易凡. 交互式多模型概率数据关联抗速度拖引干扰算法[J]. 系统工程与电子技术, 2025, 47(5): 1507-1515. |
| [3] | 段阿敏, 张朝辉. 基于二次分解的混合神经网络蜂窝流量预测[J]. 系统工程与电子技术, 2025, 47(5): 1687-1697. |
| [4] | 陈壮壮, 宋骊平. 机动目标跟踪的交互多模型泊松多伯努利混合滤波[J]. 系统工程与电子技术, 2024, 46(3): 786-794. |
| [5] | 陈维义, 何凡, 刘国强, 毛伟伟. 变结构交互式多模型滤波和平滑算法[J]. 系统工程与电子技术, 2023, 45(12): 4005-4012. |
| [6] | 侯子林, 程婷, 彭瀚. 基于量测转换序贯滤波的GMPHD机动目标跟踪[J]. 系统工程与电子技术, 2022, 44(8): 2474-2482. |
| [7] | 卢雨, 王海滨. 空基无源相干定位系统的机动目标跟踪算法[J]. 系统工程与电子技术, 2021, 43(4): 875-882. |
| [8] | 李纪三, 蔡文彬, 耿利祥, 刘溶, 任渊. 旋转相控阵雷达变数据率目标跟踪算法[J]. 系统工程与电子技术, 2021, 43(3): 676-683. |
| [9] | 尹聚祺, 杨震, 罗亚中, 周剑勇. 空间机动目标跟踪的改进自适应IMM算法[J]. 系统工程与电子技术, 2021, 43(12): 3658-3666. |
| [10] | 刘凯, 张斌, 黄青华. 基于TCNN-BiLSTM网络的调制识别算法[J]. 系统工程与电子技术, 2020, 42(8): 1841-1849. |
| [11] | 陈星, 李战武, 徐安, 胡晓东. 基于目标机动模式识别的VSMM算法[J]. 系统工程与电子技术, 2020, 42(5): 999-1006. |
| [12] | 刘代, 赵永波, 周永伟, 陈明哲, 李伟. 高分辨距离像辅助的机动目标跟踪算法[J]. 系统工程与电子技术, 2019, 41(9): 1967-1972. |
| [13] | 张浩为, 谢军伟, 葛佳昂, 宗彬锋, 路文龙. 自适应CS模型的强跟踪平方根容积卡尔曼滤波算法[J]. 系统工程与电子技术, 2019, 41(6): 1186-1194. |
| [14] | 孙扬, 郑娜娥, 李玉翔, 任修坤. 针对目标跟踪的分布式MIMO雷达资源分配算法[J]. 系统工程与电子技术, 2017, 39(8): 1744-1750. |
| [15] | 杨永建, 樊晓光, 王晟达, 禚真福, 南建国, 黄伯儒. 基于自适应CS模型的IMM算法[J]. 系统工程与电子技术, 2016, 38(5): 977-. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||