
系统工程与电子技术 ›› 2021, Vol. 43 ›› Issue (4): 1036-1043.doi: 10.12305/j.issn.1001-506X.2021.04.21
闫安1( ), 陈章2,*(), 董朝阳1(), 何康辉1()
), 陈章2,*(), 董朝阳1(), 何康辉1()
收稿日期:2020-06-13
出版日期:2021-03-25
发布日期:2021-03-31
通讯作者:
陈章
E-mail:yanan801@buaa.edu.cn;cz_da@tsinghua.edu.cn;dongchaoyang@buaa.edu.cn;502711921@qq.com
作者简介:闫安 (1996-), 男, 硕士研究生, 主要研究方向为智能控制应用、飞行器的导航与控制。E-mail: 基金资助:
An YAN1(), Zhang CHEN2,*(), Chaoyang DONG1(), Kanghui HE1()
Received:2020-06-13
Online:2021-03-25
Published:2021-03-31
Contact:
Zhang CHEN
E-mail:yanan801@buaa.edu.cn;cz_da@tsinghua.edu.cn;dongchaoyang@buaa.edu.cn;502711921@qq.com
摘要:
针对单轨双轮机器人在静止情况下存在的固有静态不稳定问题, 提出一种基于模糊强化学习(简称为Fuzzy-Q)的控制方法。首先,运用拉格朗日法建立带控制力矩陀螺的系统动力学模型。然后, 在此基础上设计表格型强化学习算法, 实现机器人的稳定平衡控制。最后,针对算法存在的控制精度不高和控制器输出离散等问题, 采用模糊理论泛化动作空间, 改善控制精度, 并使控制输出连续。仿真实验表明, 相较于传统强化学习方法, 所提方法能够显著提高控制精度, 且可以有效抑制外界干扰力矩对系统的影响, 保证系统具有一定的抗干扰能力。
中图分类号:
闫安, 陈章, 董朝阳, 何康辉. 基于模糊强化学习的双轮机器人姿态平衡控制[J]. 系统工程与电子技术, 2021, 43(4): 1036-1043.
An YAN, Zhang CHEN, Chaoyang DONG, Kanghui HE. Attitude balance control of two-wheeled robot based on fuzzy reinforcement learning[J]. Systems Engineering and Electronics, 2021, 43(4): 1036-1043.
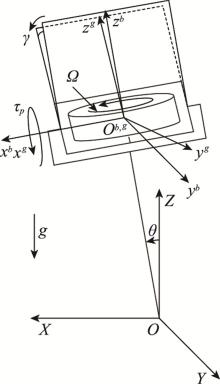
图1
CMG右侧视图"
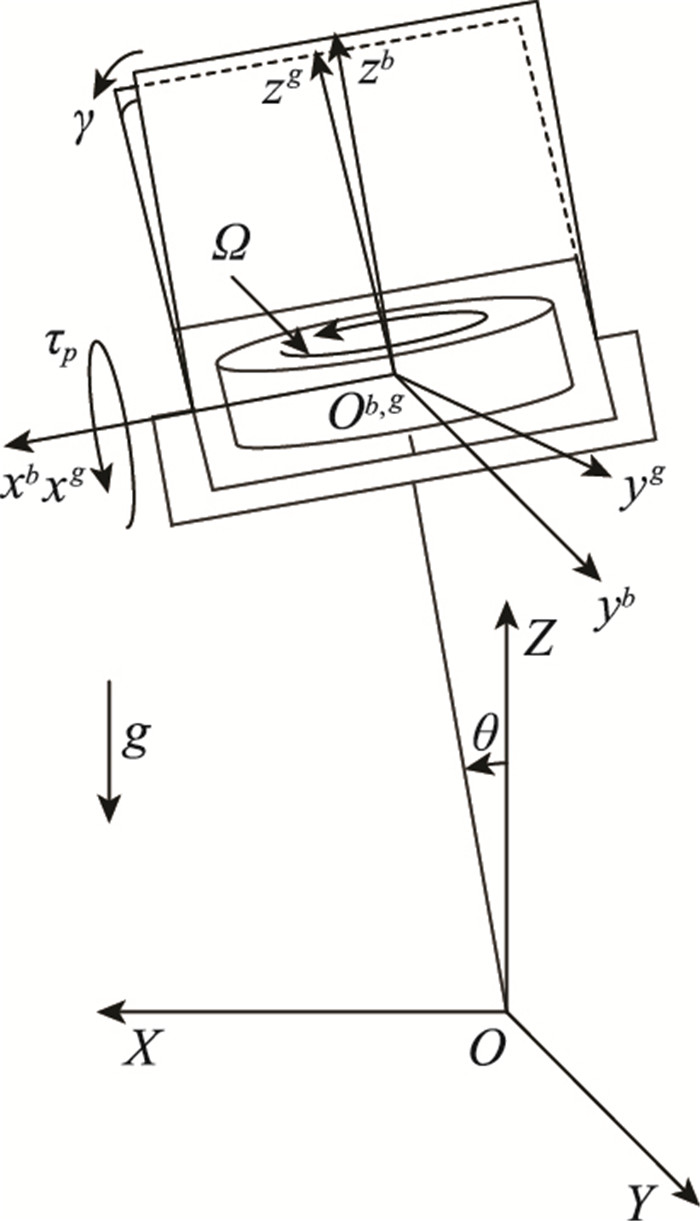
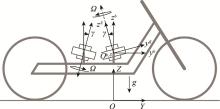
图2
基于CMG的机器人模型"
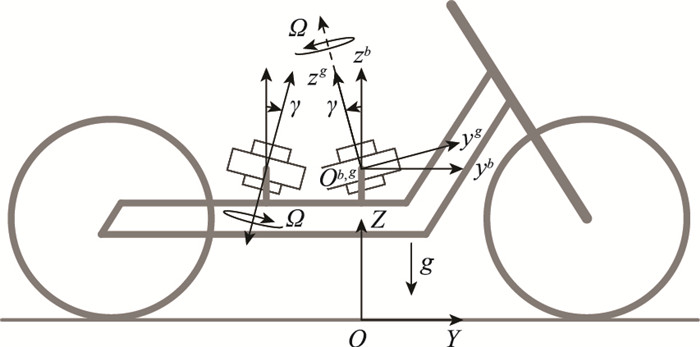
图3
倾角隶属度函数"
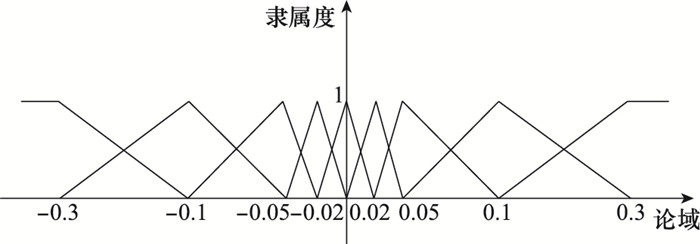
表1
倾角离散区间划分"
| 编号 | 描述 | 范围/rad |
| 1 | 左偏很大 | (-∞, -0.3) |
| 2 | 左偏较大 | [-0.3, -0.1) |
| 3 | 左偏大 | [-0.1, -0.05) |
| 4 | 左偏较小 | [-0.05, -0.02) |
| 5 | 左偏很小 | [-0.02, 0) |
| 6 | 右偏很小 | [0, 0.02] |
| 7 | 右偏较小 | (0.02, 0.05] |
| 8 | 右偏大 | (0.05, 0.1] |
| 9 | 右偏较大 | (0.1, 0.3] |
| 10 | 右偏很大 | (0.3, +∞) |
表2
倾角角速度离散区间划分"
| 编号 | 描述 | 范围/(rad/s) |
| 1 | 向左很大 | (-∞, -0.9) |
| 2 | 向左较大 | [-0.9, -0.5) |
| 3 | 向左大 | [-0.1, -0.5) |
| 4 | 向左较小 | [-0.1, -0.05) |
| 5 | 向左很小 | [-0.05, 0) |
| 6 | 向右很小 | [0, 0.05] |
| 7 | 向右较小 | (0.05, 0.1] |
| 8 | 向右大 | (0.1, 0.5] |
| 9 | 向右较大 | (0.5, 0.9] |
| 10 | 向右很大 | (0.9, +∞) |
表3
动作离散区间划分"
| 编号 | 描述 | 取值/(N·m) |
| 1 | 向左较大 | -10 |
| 2 | 向左较小 | -1 |
| 3 | 无偏 | 0 |
| 4 | 向右较小 | 1 |
| 5 | 向右较大 | 10 |
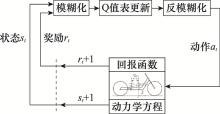
图4
系统结构框图"
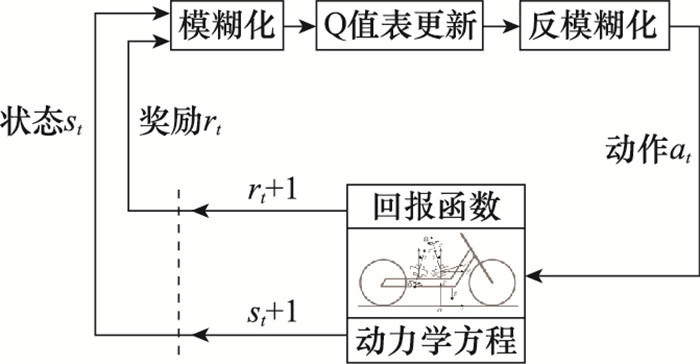
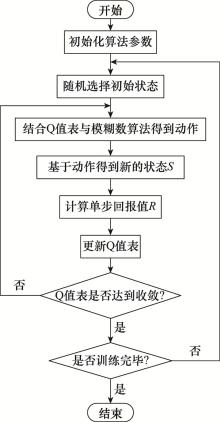
图5
算法流程图"
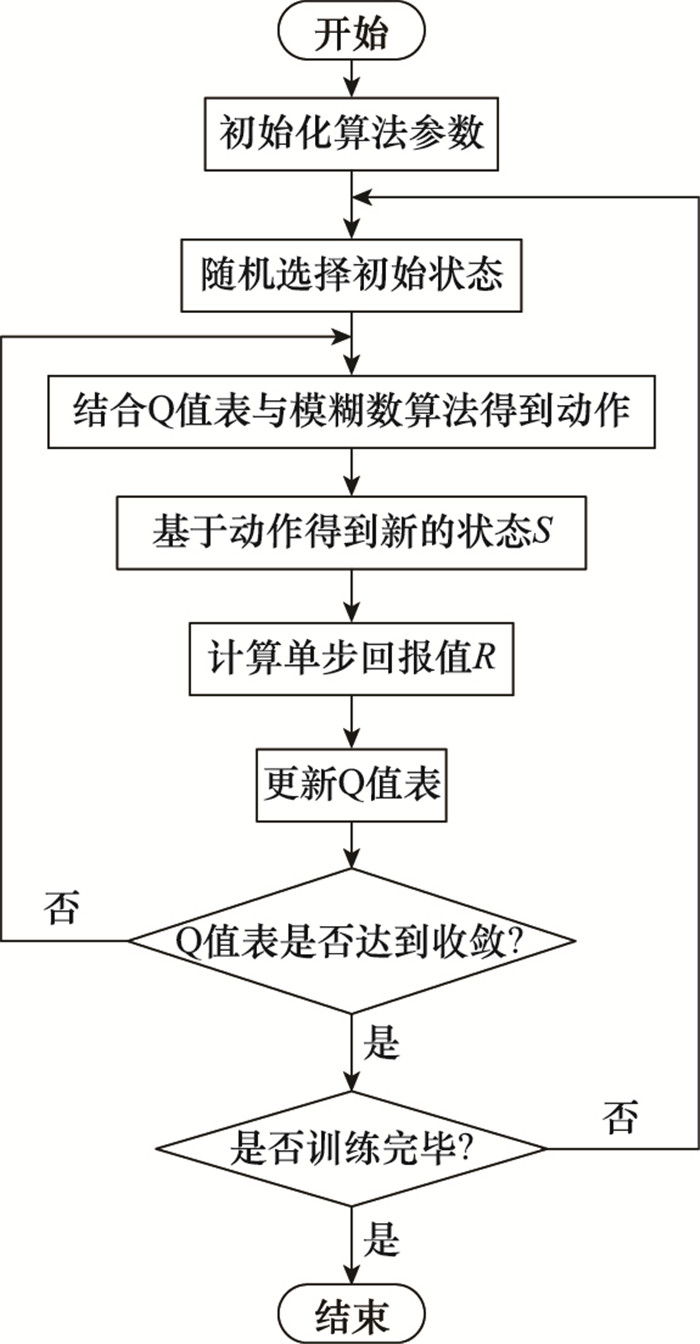

图6
机器人实物图"

表4
机器人模型参数"
| 参数 | 符号 | 取值 |
| 飞轮质量/kg | mf | 15.4 |
| 飞轮X轴转动惯量/(kg·m2) | Ifx | 0.045 7 |
| 飞轮Y轴转动惯量/(kg·m2) | Ify | 0.045 7 |
| 飞轮Z轴转动惯量/(kg·m2) | Ifz | 0.085 |
| 陀螺框架主轴惯量/(kg·m2) | — | 0 |
| 车身主轴惯量/(kg·m2) | Iby | 14.56 |
| 车身质心高度/m | hb | 0.35 |
| 飞轮质心高度/m | hf | 0.3 |
| 陀螺框架质心高度/m | hg | 0 |
| 车身质量/kg | mb | 89.2 |
| 飞轮自转角速度/rpm | Ω | 4 000 |
| 陀螺框架质量/kg | mg | 0 |
| 重力加速度/(N/kg) | g | 9.8 |
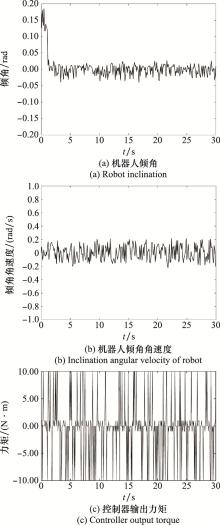
图7
Q-learning算法下机器人控制仿真结果"
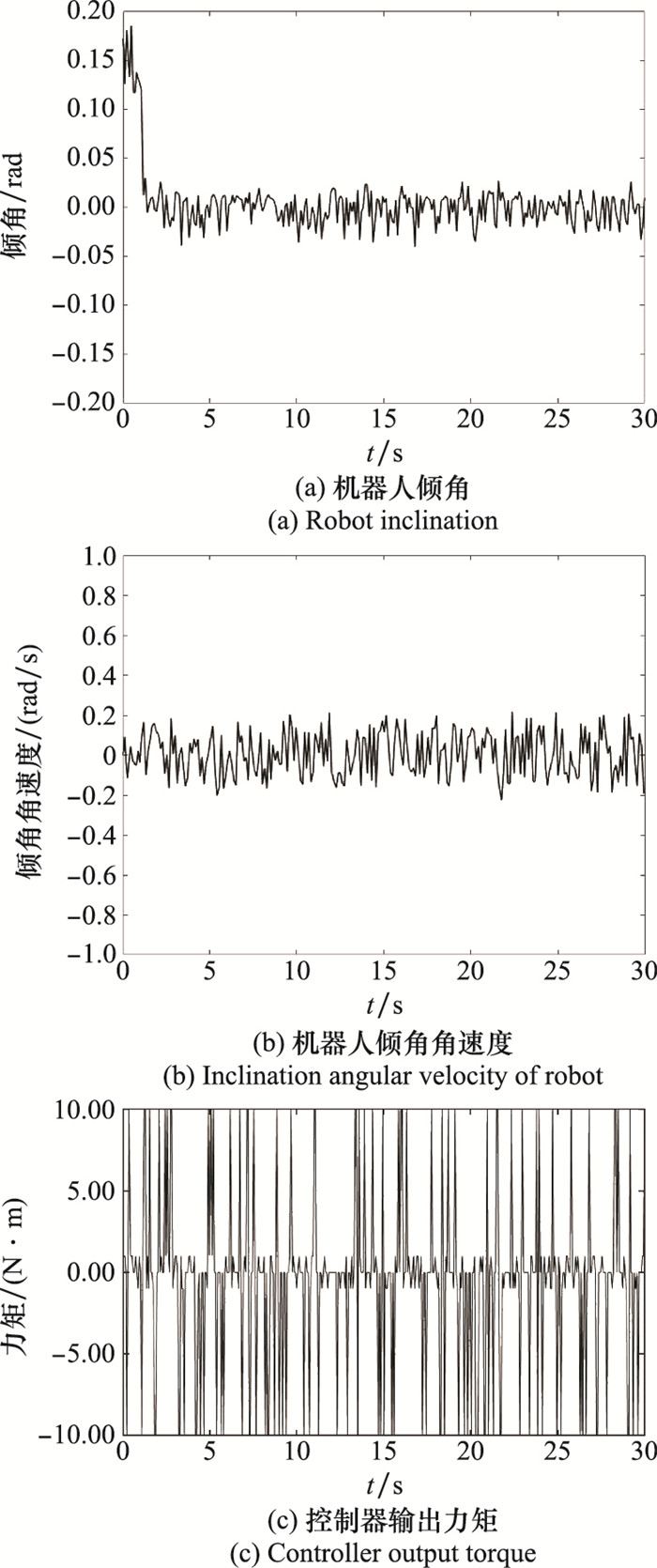
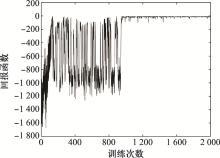
图8
Q-learning算法的回报函数"
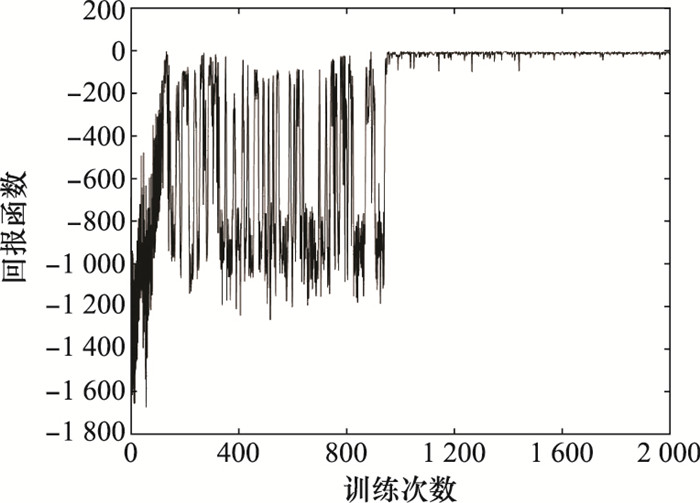
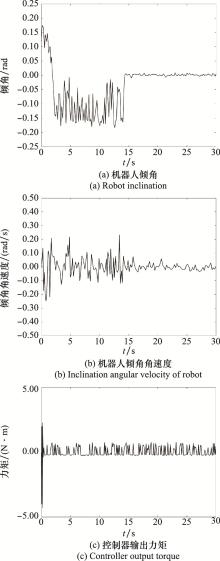
图9
Fuzzy-Q算法下机器人控制仿真结果"
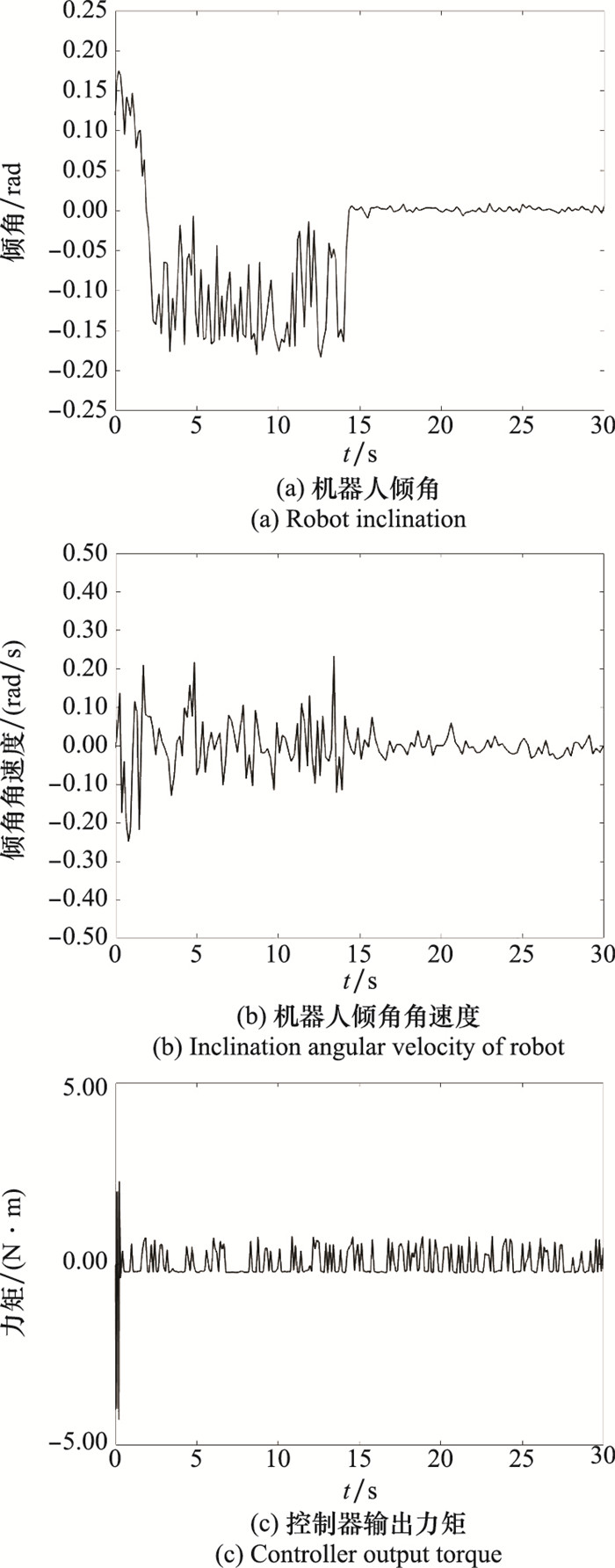
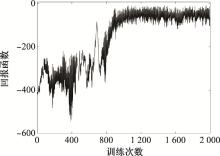
图10
Fuzzy-Q算法的回报函数"
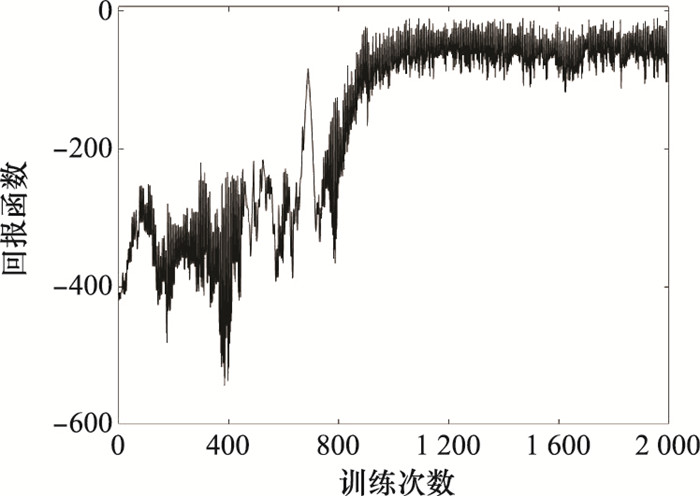

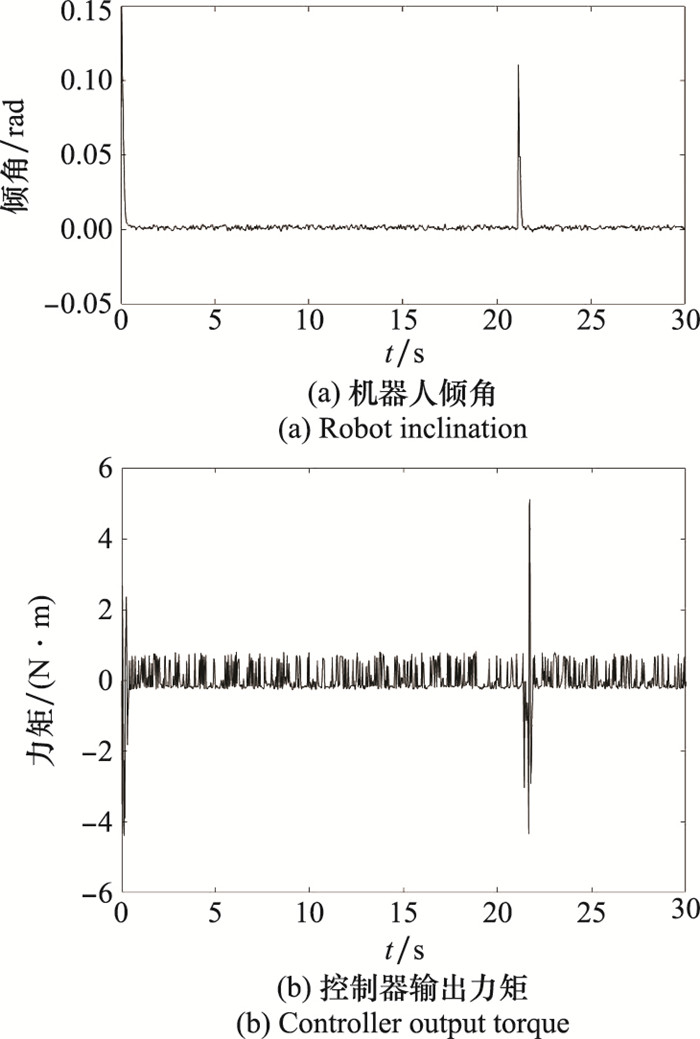
图11
受干扰时机器人控制仿真结果"
| 1 | MENG J, LIU A B, YANG Y Q, et al. Two-wheeled robot platform based on pid control[C]//Proc. of the International Conference on Information Science and Control Engineering, 2018: 1011-1014. |
| 2 |
WARDANA A A , TAKAKI T , AOYAMA T , et al. Dynamic modeling and step-climbing analysis of a two-wheeled stair-climbing inverted pendulum robot[J]. Advanced Robotics, 2020, 34 (5): 313- 327.
doi: 10.1080/01691864.2019.1704868 |
| 3 | UDDIN N , TEGUH A N , WAHYU A P . Passivity-based control for two-wheeled robot stabilization[J]. Journal of Physics: Conference Series, 2018, 1007 (1): 1- 6. |
| 4 | 宁一高, 岳明, 许媛, 等. 基于IMU/UWB的两轮自平衡车轨迹跟踪控制器设计与实现[J]. 控制与决策, 2019, 34 (12): 2635- 2641. |
| NING Y G , YUE M , XU Y , et al. Design and implementation of tra-jectory tracking controller for two-wheel self-balancing vehicle based on IMU/UWB[J]. Control and Decision, 2019, 34 (12): 2635- 2641. | |
| 5 | ZHANG Y Z, WANG P C, YI J G, et al. Stationary balance control of a bikebot[C]//Proc. of the IEEE International Confe-rence on Robotics and Automation, 2014: 6706-6711. |
| 6 | KEO L, YOSHINO K, KAWAGUCHI M, et al. Experimental results for stabilizing of a bicycle with a flywheel balancer[C]//Proc. of the International Conference on Robotics and Automation, 2011: 6150-6155. |
| 7 | LAM P Y , SIN T K . Gyroscopic stabilization of a self-balancing robt bicycle[J]. Automation Twchnology, 2011, 5 (6): 916- 923. |
| 8 | HE J, ZHAO M G. Control system design of self-balanced bicycles by control moment gyroscope[C]//Proc. of the China Intelligent Automation Academic Conference, 2015: 206-215. |
| 9 | HSIEH M H, CHEN Y T, CHI C H, et al. Fuzzy sliding mode control of a riderless bicycle with a gyroscopic balancer[C]//Proc. of the International Symposium on Robotic and Sensors Environments, 2014: 13-18. |
| 10 | JIAN F , HE T Y . The LQR controller design of two-wheeled self-balancing robot based on the particle swarm optimization algorithm[J]. Mathematical Problems in Engineering, 2014, 12, 1- 6. |
| 11 | 李润泽, 张宇飞, 陈海昕. 针对超临界翼型气动修型策略的强化学习研究[J]. 航空学报, 2020, 41 (10): 1- 18. |
| LI R Z , ZHANG Y F , CHEN H X . Study on reinforcement learning of aerodynamic modification strategy for supercritical airfoil[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (10): 1- 18. | |
| 12 | MUKHOPADHYAY S, TILAK O, CHAKRABARTI S. Reinforcement learning algorithms for uncertain, dynamic, zero-sum games[C]//Proc. of the International Conference on Machine Learning and Applications, 2018: 48-54. |
| 13 | 邢强, 贾鑫, 朱卫. 基于Q-学习的智能雷达对抗[J]. 系统工程与电子技术, 2018, 40 (5): 1031- 1035. |
| XING Q , JIA X , ZHU W . Intelligent radar countermeasures based on Q-learning[J]. Systems Engineering and Electronics, 2018, 40 (5): 1031- 1035. | |
| 14 | 张晓路, 李斌, 常健, 等. 水下滑翔蛇形机器人滑翔控制的强化学习方法[J]. 机器人, 2019, 41 (3): 334- 342. |
| ZHANG X L , LI B , CHANG J , et al. Reinforcement learning method for gliding control of underwater gliding snake robot[J]. Robot, 2019, 41 (3): 334- 342. | |
| 15 | SUTTON R S , MCALLESTER D , SINGH S , et al. Policy gradient methods for reinforcement learning with function approximation[J]. Advances in Neural Information Processing Systems, 2000, 12, 1057- 1063. |
| 16 | 蒋国飞, 吴沧浦. 基于Q学习算法和BP神经网络的倒立摆控制[J]. 自动化学报, 1998, 24 (5): 662- 666. |
| JIANG G F , WU C P . Inverted pendulum control based on Q-learning algorithm and BP neural network[J]. Acta Automatica Sinica, 1998, 24 (5): 662- 666. | |
| 17 |
WANG Y , LIU Y T , CHEN W , et al. Target transfer Q-learning and its convergence analysis[J]. Neurocomputing, 2020, 392, 11- 22.
doi: 10.1016/j.neucom.2020.02.117 |
| 18 | BAIRD L C, KLOPF A H. Reinforcement learning with high-dimensional, continuous actions[EB/OL]. [2020-06-01]. https://xueshu.baidu.com/usercenter/paper/show?paperid=ce2d12b15ed2f32cbd8655240a6aca67&site=xueshu_se. |
| 19 | 王舒, 郑世强. 基于复合控制的磁悬浮CMG动框架效应抑制[J]. 北京航空航天大学学报, 2020, 46 (12): 2339- 2347. |
| WANG S , ZHENG S Q . Inhibition of dynamic frame effect of magnetic levitation CMG based on composite control[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46 (12): 2339- 2347. | |
| 20 |
ZENG W J , PAN S , CHEN L , et al. Research on ultra-low speed driving method of traveling wave ultrasonic motor for CMG[J]. Ultrasonics, 2020, 103, 106088.
doi: 10.1016/j.ultras.2020.106088 |
| 21 | 贾英宏, 赵楠, 徐世杰. 控制力矩陀螺驱动的空间机器人轨迹跟踪控制[J]. 北京航空航天大学学报, 2014, 40 (3): 285- 291. |
| JIA Y H , ZHAO N , XU S J . Control the trajectory tracking control of space robot driven by torque gyro[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40 (3): 285- 291. | |
| 22 |
郭磊, 黄用华, 廖启征, 等. 自平衡自行车机器人的运动学分析[J]. 北京邮电大学学报, 2011, 34 (6): 99- 102.
doi: 10.3969/j.issn.1007-5321.2011.06.023 |
|
GUO L , HUANG Y H , LIAO Q Z , et al. Kinematics analysis of self-balancing bicycle robot[J]. Journal of Beijing University of Posts and Telecommunications, 2011, 34 (6): 99- 102.
doi: 10.3969/j.issn.1007-5321.2011.06.023 |
|
| 23 | 王囡囡, 熊佳铭, 刘才山. 自行车动力学建模及稳定性分析研究综述[J]. 力学学报, 2020, 52 (4): 917- 927. |
| WANG N N , XIONG J M , LIU C S . A review of bicycle dynamics modeling and stability analysis[J]. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52 (4): 917- 927. | |
| 24 | GETZ N H, JERROLD E M. Dynamic inversion of nonlinear maps with applications to nonlinear control and robotics[D]. Berkeley: University of California, 1995. |
| 25 | GUO L, LIAO Q Z, WEI S M, et al. A kind of bicycle robot dynamic modeling and nonlinear control[C]//Proc. of the International Conference on Information and Automation, 2010: 1613-1617. |
| 26 | KEO L, YAMAKITA M. Controlling balancer and steering for bicycle stabilization[C]//Proc. of the Intelligent Robots and Systems, 2009: 4541-4546. |
| 27 | WATKINS C J C H , DAYAN P . Q-learning[J]. Machine Learning, 1992, 8 (3): 279- 292. |
| 28 | SCHILPEROORT J, MAK I, DRUGAN M M, et al. Learning to play pac-xon with Q-learning and two double Q-learning variants[C]//Proc. of the Symposium Series on Computational Intelligence, 2018: 1151-1158. |
| 29 | DAS P K , BEHERA H S , PANIGRAHI B K . Intelligent-based multi-robot path planning inspired by improved classical Q-learning and improved particle swarm optimization with perturbed velocity[J]. Engineering Science and Technoloy, 2016, 19 (1): 651- 669. |
| 30 | SCHILPEROORT J, MAK I, DRUGAN M M, et al. Wiering learning to play pac-xon with Q-learning and two double Q-learning variants[C]//Proc. of the Symposium Series on Computational Intelligence, 2018: 1151-1158. |
| 31 | SUN C Y. Q-Learning: fundamental Q-learning algorithm in finding optimal policy[C]//Proc. of the International Conference on Smart Grid and Electrical Automation, 2017: 243-246. |
| 32 | LI X X , PENG Z H , JIAO L , et al. Online adaptive Q-learning method for fully cooperative linear quadratic dynamic games[J]. Science China (Information Sciences), 2019, 62 (12): 164- 177. |
| 33 | ZHANG W Z , LYU T S . Reactive fuzzy controller design by Q-learning for mobile robot navigation[J]. Journal of Harbin Institute of Technology, 2005, 3, 319- 324. |
| [1] | 周文明, 崔德康, 周婧怡, 张明明, 朱安石. 储供基地支援保障能力评估混合算法[J]. 系统工程与电子技术, 2022, 44(9): 2832-2839. |
| [2] | 朱霸坤, 朱卫纲, 李伟, 杨莹, 高天昊. 基于马尔可夫的多功能雷达认知干扰决策建模研究[J]. 系统工程与电子技术, 2022, 44(8): 2488-2497. |
| [3] | 王冠, 茹海忠, 张大力, 马广程, 夏红伟. 弹性高超声速飞行器智能控制系统设计[J]. 系统工程与电子技术, 2022, 44(7): 2276-2285. |
| [4] | 孟泠宇, 郭秉礼, 杨雯, 张欣伟, 赵柞青, 黄善国. 基于深度强化学习的网络路由优化方法[J]. 系统工程与电子技术, 2022, 44(7): 2311-2318. |
| [5] | 郭冬子, 黄荣, 许河川, 孙立伟, 崔乃刚. 再入飞行器深度确定性策略梯度制导方法研究[J]. 系统工程与电子技术, 2022, 44(6): 1942-1949. |
| [6] | 韩明仁, 王玉峰. 基于强化学习的全电推进卫星变轨优化方法[J]. 系统工程与电子技术, 2022, 44(5): 1652-1661. |
| [7] | 何立, 沈亮, 李辉, 王壮, 唐文泉. 强化学习中的策略重用: 研究进展[J]. 系统工程与电子技术, 2022, 44(3): 884-899. |
| [8] | 朱霸坤, 朱卫纲, 李伟, 杨莹, 高天昊. 基于先验知识的多功能雷达智能干扰决策方法[J]. 系统工程与电子技术, 2022, 44(12): 3685-3695. |
| [9] | 杨清清, 高盈盈, 郭玙, 夏博远, 杨克巍. 基于深度强化学习的海战场目标搜寻路径规划[J]. 系统工程与电子技术, 2022, 44(11): 3486-3495. |
| [10] | 曾斌, 张鸿强, 李厚朴. 针对无人潜航器的反潜策略研究[J]. 系统工程与电子技术, 2022, 44(10): 3174-3181. |
| [11] | 万齐天, 卢宝刚, 赵雅心, 温求遒. 基于深度强化学习的驾驶仪参数快速整定方法[J]. 系统工程与电子技术, 2022, 44(10): 3190-3199. |
| [12] | 曾斌, 王睿, 李厚朴, 樊旭. 基于强化学习的战时保障力量调度策略研究[J]. 系统工程与电子技术, 2022, 44(1): 199-208. |
| [13] | 江志炜, 黄洋, 吴启晖. 基于核函数强化学习的抗干扰频点分配[J]. 系统工程与电子技术, 2021, 43(6): 1547-1556. |
| [14] | 刘家义, 岳韶华, 王刚, 姚小强, 张杰. 复杂任务下的多智能体协同进化算法[J]. 系统工程与电子技术, 2021, 43(4): 991-1002. |
| [15] | 李琛, 黄炎焱, 张永亮, 陈天德. Actor-Critic框架下的多智能体决策方法及其在兵棋上的应用[J]. 系统工程与电子技术, 2021, 43(3): 755-762. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||