
系统工程与电子技术 ›› 2022, Vol. 44 ›› Issue (7): 2276-2285.doi: 10.12305/j.issn.1001-506X.2022.07.24
王冠1, 茹海忠2, 张大力1, 马广程1, 夏红伟1,*
收稿日期:2021-08-23
出版日期:2022-06-22
发布日期:2022-06-28
通讯作者:
夏红伟
作者简介:王冠(1994—), 男, 博士研究生, 主要研究方向为飞行器控制|茹海忠(1985—), 男, 高级工程师, 硕士, 主要研究方向为制导导航与控制|张大力(1991—), 男, 博士研究生, 主要研究方向为智能优化与轨迹规划|马广程(1971—), 男, 教授, 博士, 主要研究方向为运动控制与空间控制|夏红伟(1979—), 男, 教授, 博士, 主要研究方向为飞行器控制与仿真技术
基金资助:Guan WANG1, Haizhong RU2, Dali ZHANG1, Guangcheng MA1, Hongwei XIA1,*
Received:2021-08-23
Online:2022-06-22
Published:2022-06-28
Contact:
Hongwei XIA
摘要:
针对气动舵受限下的弹性高超声速飞行器控制问题, 提出一种基于神经自适应的智能控制方案。在速度子系统的设计过程中, 为了降低对模型参数的依赖程度, 应用强化学习算法在线调整比例积分微分(proportional integral derivative, PID)控制参数, 给出智能PID控制策略。对于高度子系统, 考虑气动舵的动态特性, 利用神经自适应方法对模型未知函数及不确定项进行逼近。为了处理气动舵的约束问题, 以非线性模型预测控制为优化分配模板生成大量样本数据集, 经离线训练得到深度神经网络代替求解复杂优化问题和控制分配的过程。此外, 通过引入自适应超螺旋微分器处理外部扰动, 增强了系统的鲁棒性。利用Lyapunov方法证明了所设计控制器的稳定性, 并通过仿真验证了所设计控制方案能够快速计算控制指令, 实现高精度跟踪控制。
中图分类号:
王冠, 茹海忠, 张大力, 马广程, 夏红伟. 弹性高超声速飞行器智能控制系统设计[J]. 系统工程与电子技术, 2022, 44(7): 2276-2285.
Guan WANG, Haizhong RU, Dali ZHANG, Guangcheng MA, Hongwei XIA. Design of intelligent control system for flexible hypersonic vehicle[J]. Systems Engineering and Electronics, 2022, 44(7): 2276-2285.
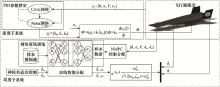
图1
控制系统框图"
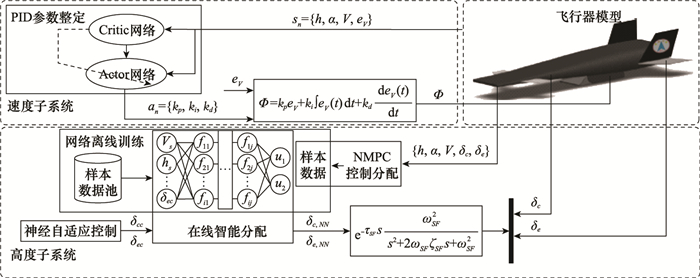
表1
高超声速飞行器的状态约束"
| 参数 | 下界 | 上界 |
| V/(m/s) | 1 700 | 3 400 |
| h/(m) | 18 288 | 36 576 |
| γ/(°) | -10 | 10 |
| α/(°) | -10 | 10 |
| Q/(°/s) | -20 | 20 |
表2
训练参数设置"
| 训练参数 | 参数值 |
| 学习率 | 0.000 1 |
| 批学习数 | 128 |
| 网络噪声 | 0.5, 0.1 |
| 惯性更新率 | 0.001 |
| 经验池大小 | 1 000 000 |
图2
累计回报曲线"
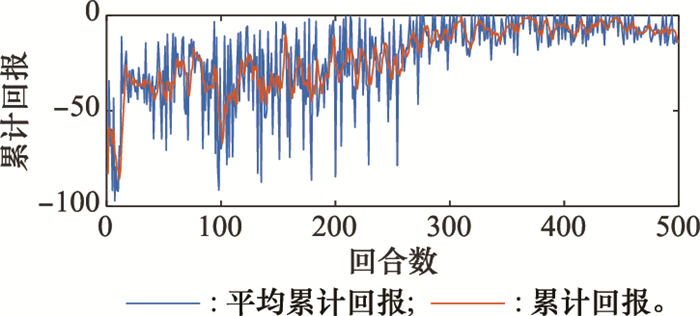
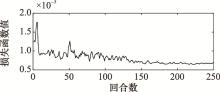
图3
损失函数曲线"
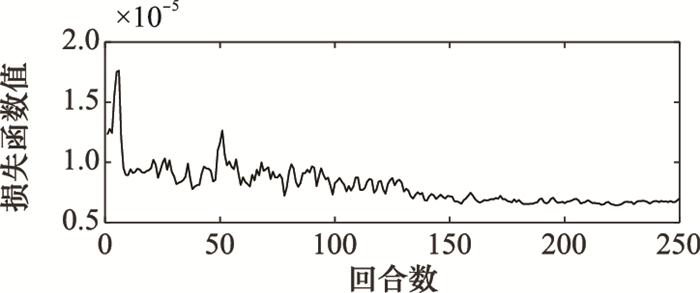
表3
高超声速飞行器的状态初值"
| 参数 | 数值 |
| V/(m/s) | 2 400 |
| h/(m) | 26 000 |
| γ/(°) | 0 |
| α/(°) | 2.66 |
| Q/(°/s) | 0 |
| η1 | 0.832 |
| η2 | 0.121 |
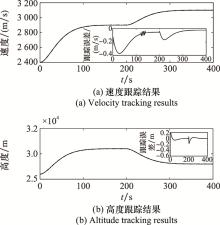
图4
速度和高度跟踪结果"
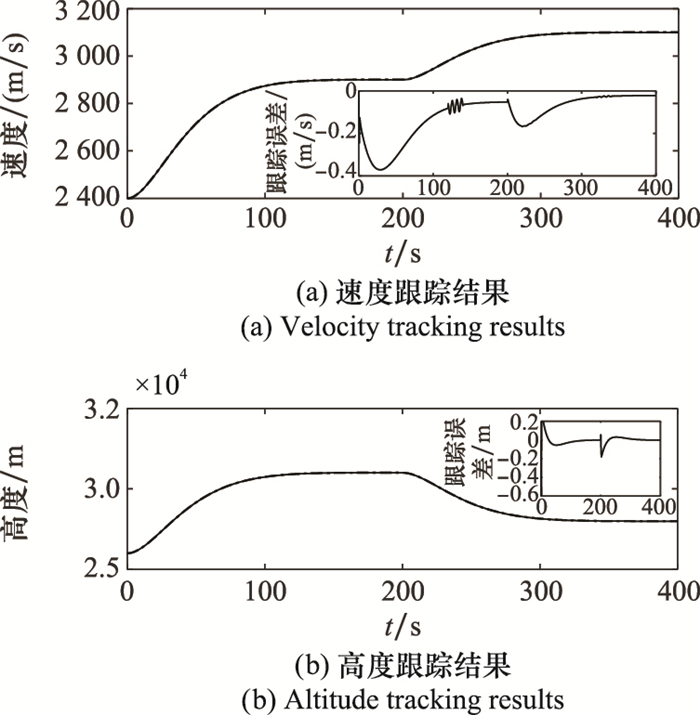
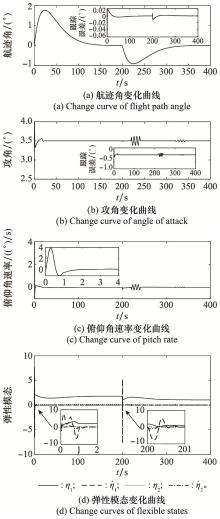
图5
系统状态响应曲线"
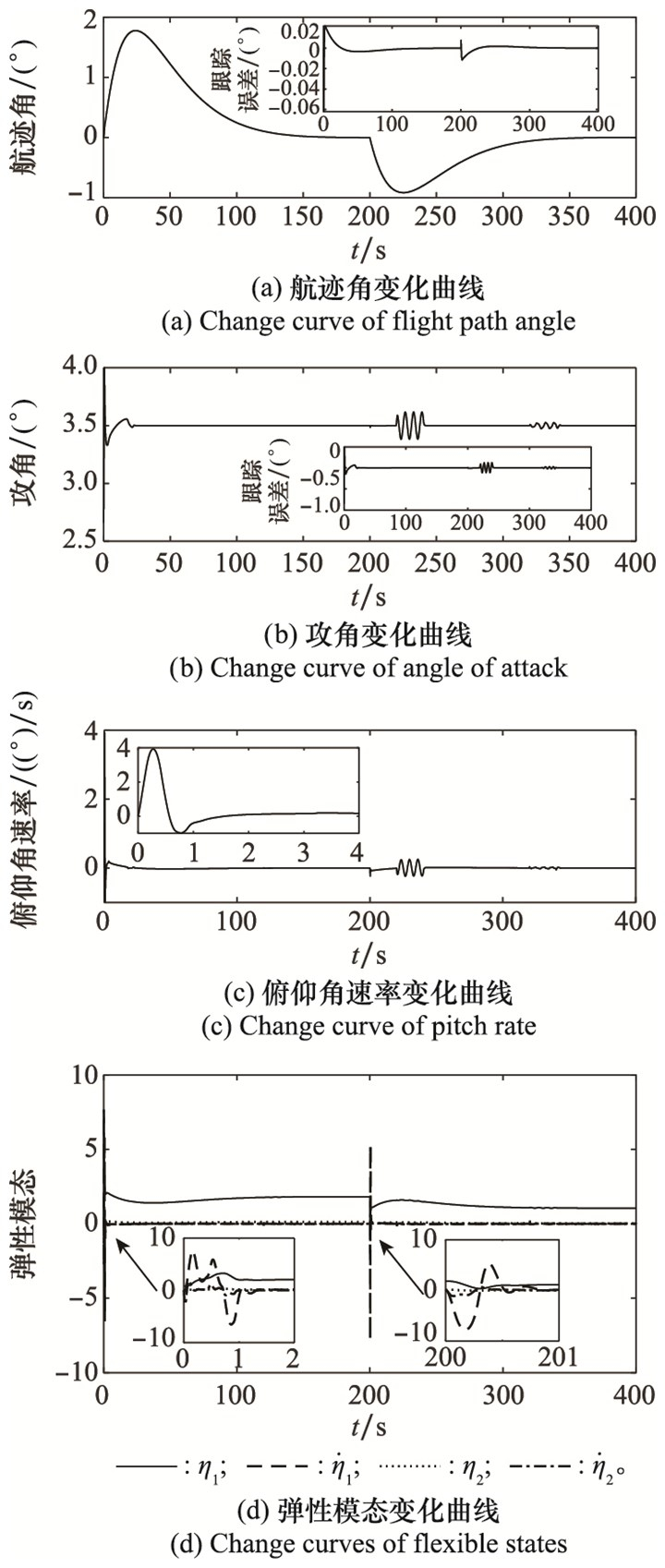
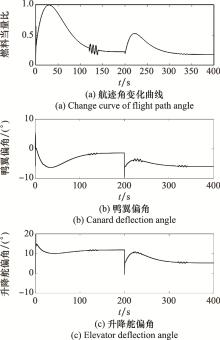
图6
控制输入曲线"
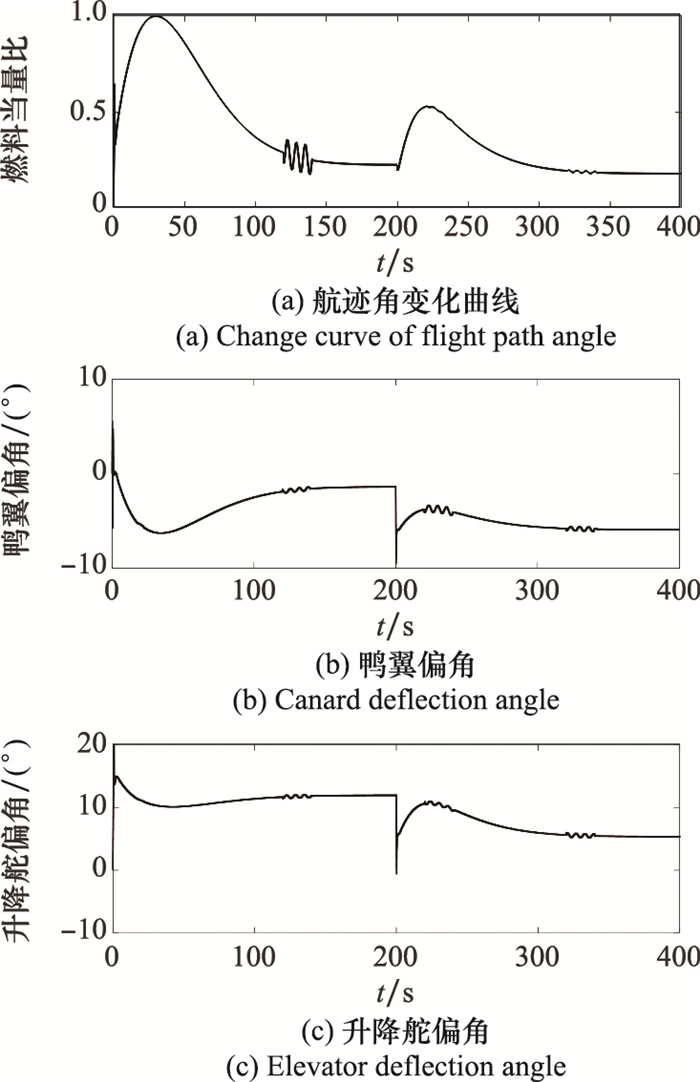
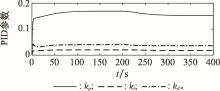
图7
PID参数变化曲线"
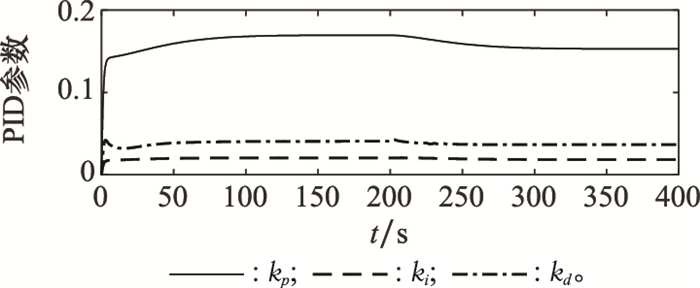
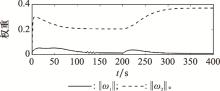
图8
权重变化曲线"
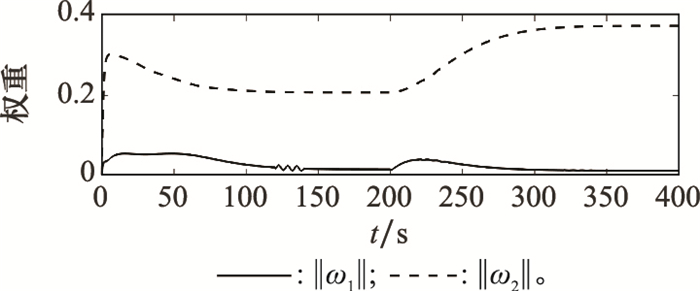
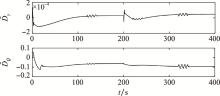
图9
等效干扰估计结果"
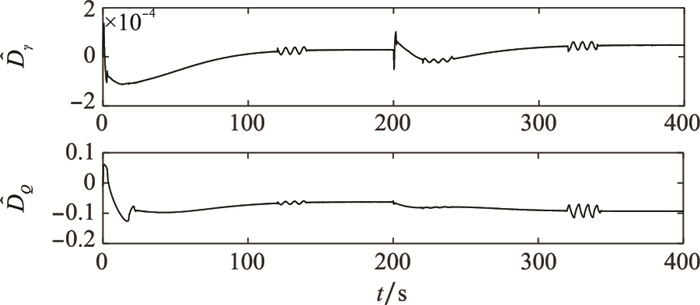
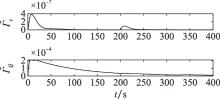
图10
误差上界估计结果"
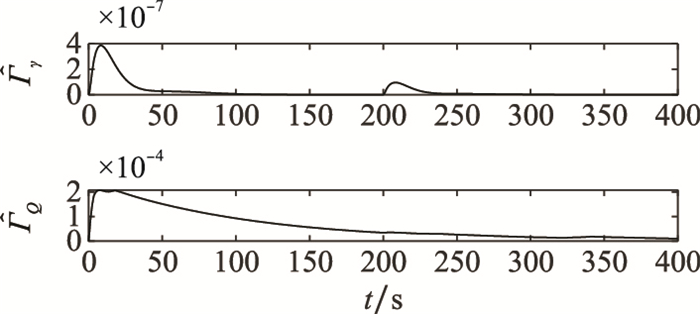
表4
控制分配算法运行时间比较"
| 算法 | 运行时间/s |
| NMPC | 81.51 |
| DNN | 7.86 |

图11
速度与高度跟踪响应对比曲线"
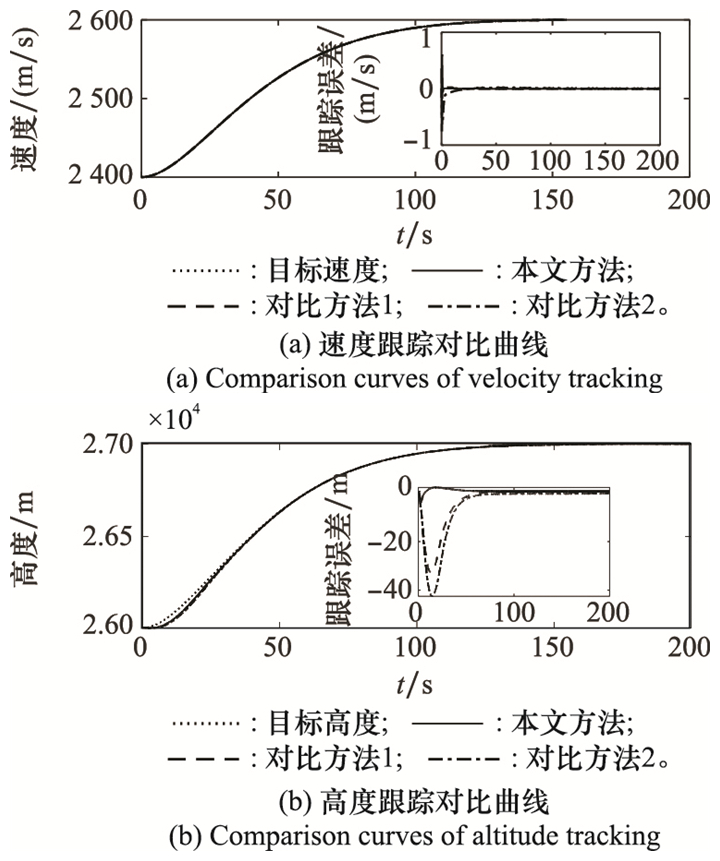
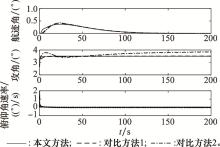
图12
系统状态响应对比曲线"
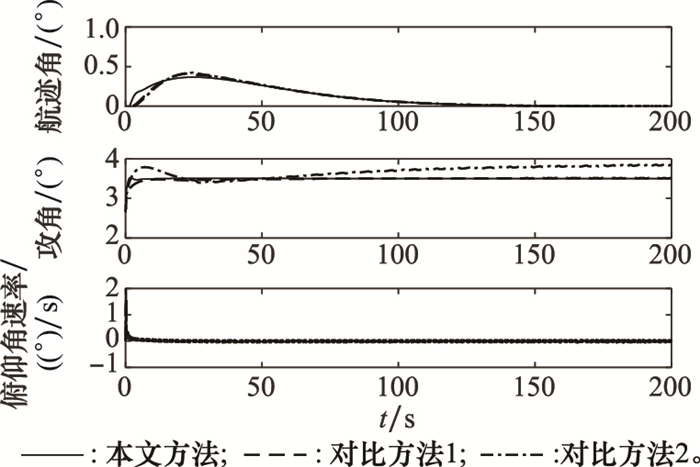
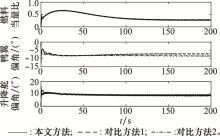
图13
控制输入对比曲线"
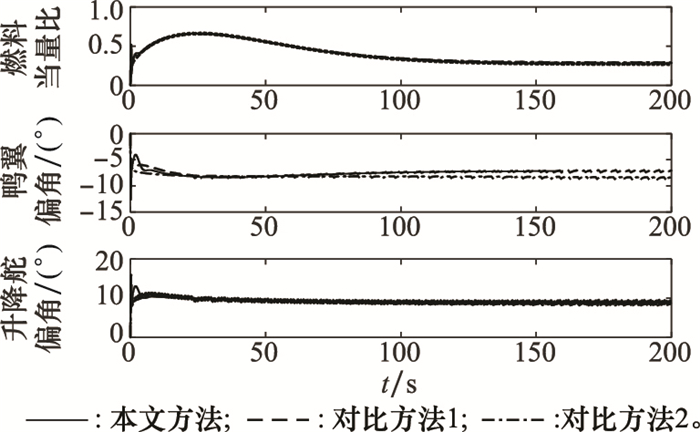
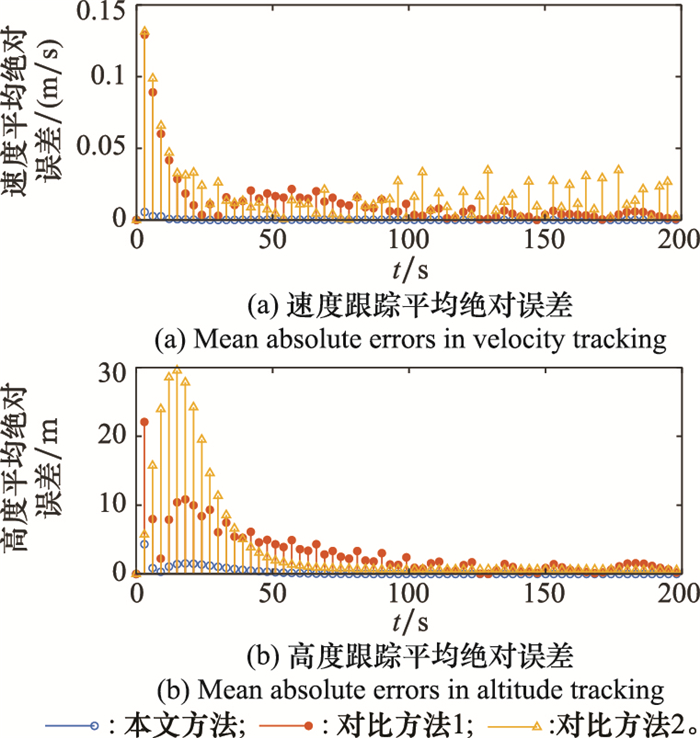
图14
平均绝对误差曲线"
| 1 | PEEBLES C . Road to Mach 10: lessons learned from the X-43A flight research program[M]. Reston: American Institute of Aeronautics and Astronautics, 2008. |
| 2 |
SHOU Y X , XU B , LIANG X H , et al. Aerodynamic/reaction-jet compound control of hypersonic reentry vehicle using sliding mode control and neural learning[J]. Aerospace Science and Technology, 2021, 111, 106564.
doi: 10.1016/j.ast.2021.106564 |
| 3 |
FIORENTINI L , SERRANI A , BOLENDER M A , et al. Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicles[J]. Journal of Guidance, Control, and Dynamics, 2009, 32 (2): 402- 417.
doi: 10.2514/1.39210 |
| 4 | REN W J , JIANG B , YANG H . Singular perturbation-based fault-tolerant control of the air-breathing hypersonic vehicle[J]. IEEE/ASME Trans.on Mechatronics, 2020, 24 (6): 2562- 2571. |
| 5 |
ZONG Q , WANG J , TAO Y . Adaptive high-order dynamic sliding mode control for a flexible air-breathing hypersonic vehicle[J]. International Journal of Robust and Nonlinear Control, 2013, 23 (15): 1718- 1736.
doi: 10.1002/rnc.3040 |
| 6 |
CHANG Y F , JIANG T T , PU Z Q . Adaptive control of hypersonic vehicles based on characteristic models with fuzzy neural network estimators[J]. Aerospace Science and Technology, 2017, 68, 475- 485.
doi: 10.1016/j.ast.2017.05.043 |
| 7 | 朴敏楠, 陈志刚, 孙明玮, 等. 高超声速飞行器气动伺服弹性的自适应抑制[J]. 航空学报, 2020, 41 (11): 623698. |
| PIAO M N , CHEN Z G , SUN M W , et al. Adaptive aeroservoelasticity suppression of hypersonic vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (11): 623698. | |
| 8 |
SHAO X L , SHI Y . Fault-tolerant quantized control for flexible air-breathing hypersonic vehicles with appointed-time tracking performances[J]. IEEE Trans.on Aerospace and Electronic Systems, 2021, 57 (2): 1261- 1273.
doi: 10.1109/TAES.2020.3040519 |
| 9 | AN H , LIU J X , WANG C , et al. Approximate back-stepping fault-tolerant control of the flexible air-breathing hypersonic vehicle[J]. IEEE/ASME Trans.on Mechatronics, 2015, 21 (3): 1680- 1691. |
| 10 | QIAN J S, QI R Y, JIANG B. Fault-tolerant guidance and control design for reentry hypersonic flight vehicles based on control-allocation approach[C]//Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2014: 1624-1629. |
| 11 |
JIN J . Modified pseudoinverse redistribution methods for redundant controls allocation[J]. Journal of Guidance, Control, and Dynamics, 2005, 28 (5): 1076- 1079.
doi: 10.2514/1.14992 |
| 12 |
YU Y , WANG H L , LI N . Fault-tolerant control for over-actuated hypersonic reentry vehicle subject to multiple disturbances and actuator faults[J]. Aerospace Science and Technology, 2019, 87, 230- 243.
doi: 10.1016/j.ast.2019.02.024 |
| 13 | BEMPORAD A , MORARI M . Robust model predictive control: a survey[M]. Robustness in identification and control. London: Springer, 1999: 207- 226. |
| 14 |
HU Q L , MENG Y . Adaptive backstepping control for air-breathing hypersonic vehicle with actuator dynamics[J]. Aerospace Science and Technology, 2017, 67, 412- 421.
doi: 10.1016/j.ast.2017.04.022 |
| 15 |
QIN W W , HE B , LIU G , et al. Robust model predictive tracking control of hypersonic vehicles in the presence of actuator constraints and input delays[J]. Journal of the Franklin Institute, 2016, 353 (17): 4351- 4367.
doi: 10.1016/j.jfranklin.2016.08.007 |
| 16 |
AN H , GUO Z Y , WANG G , et al. Neural adaptive control of air-breathing hypersonic vehicles robust to actuator dynamics[J]. ISA Transactions, 2021, 116, 17- 29.
doi: 10.1016/j.isatra.2021.01.017 |
| 17 | 黄旭星, 李爽, 杨彬, 等. 人工智能在航天器制导与控制中的应用综述[J]. 航空学报, 2021, 42 (4): 524201. |
| HUANG X X , LI S , YANG B , et al. Spacecraft guidance and control based on artificial intelligence: review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (4): 524201. | |
| 18 |
IZZO D , MRTENS M , PAN B F . A survey on artificial intelligence trends in spacecraft guidance dynamics and control[J]. Astrodynamics, 2019, 3 (4): 287- 299.
doi: 10.1007/s42064-018-0053-6 |
| 19 | 胥彪, 李翔, 李爽, 等. 基于非线性模型预测控制的火星大气进入智能制导方法[J]. 系统工程与电子技术, 2021, 43 (7): 1943- 1953. |
| XU B , LI X , LI S , et al. Intelligent guidance method based on nonlinear model predictive control for mars atmosphere entry[J]. Systems Engineering and Electronics, 2021, 43 (7): 1943- 1953. | |
| 20 |
SANCHEZ-SANCHEZ C , IZZO D . Real-time optimal control via deep neural networks: study on landing problems[J]. Journal of Guidance, Control, and Dynamics, 2018, 41 (5): 1122- 1135.
doi: 10.2514/1.G002357 |
| 21 | 许斌, 王霞. 基于时标分解的弹性高超声速飞行器智能控制[J]. 航空学报, 2020, 41 (11): 624387. |
| XU B , WANG X . Time-scale decomposition based intelligent control of flexible hypersonic flight vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (11): 624387. | |
| 22 |
VAN B W M , SCHRAM G , BABUSKA R , et al. Adaptive fuzzy control of satellite attitude by reinforcement learning[J]. IEEE Trans.on Fuzzy Systems, 1998, 6 (2): 185- 194.
doi: 10.1109/91.669012 |
| 23 | 颜军. 基于S698PM星载计算机的设计[C]//2019航空装备服务保障与维修技术论坛暨中国航空工业技术装备工程协会年会, 2019: 653-656, 659. |
| YAN J. Design of spaceborne on-board computer (OBC) using S698PM[C]//Proc. of the Aviation Equipment Service Support and Maintenance Technical Forum and Annual Meeting of China Aviation Industry Technical Equipment Engineering Association, 2019: 653-656, 659. | |
| 24 |
PARKER J T , DOMAN D B , BOLENDER M A . Control-oriented modeling of an air-breathing hypersonic vehicle[J]. Journal of Gui-dance, Control, and Dynamics, 2007, 30 (3): 856- 869.
doi: 10.2514/1.27830 |
| 25 |
胡军. 高超声速飞行器非线性自适应姿态控制[J]. 宇航学报, 2017, 38 (12): 1281- 1288.
doi: 10.3873/j.issn.1000-1328.2017.12.004 |
|
HU J . The nonlinear adaptive attitude control for hypersonic vehicle[J]. Journal of Astronautics, 2017, 38 (12): 1281- 1288.
doi: 10.3873/j.issn.1000-1328.2017.12.004 |
|
| 26 |
ALWI H , EDWARDS C . An adaptive sliding mode differentiator for actuator oscillatory failure case reconstruction[J]. Automatica, 2013, 49 (2): 642- 651.
doi: 10.1016/j.automatica.2012.11.042 |
| 27 |
JIANG Z , PARLY L . Design of robust adaptive controllers for nonlinear systems with dynamic uncertainties[J]. Automatica, 1998, 34 (7): 825- 840.
doi: 10.1016/S0005-1098(98)00018-1 |
| 28 | LILLICRAP T P , HUNT J J , PRITZEL A , et al. Continuous control with deep reinforcement learning[J]. Computer Science, 2015, 8 (6): A187. |
| 29 |
FIORENTINI L , SERRANI A . Adaptive restricted trajectory tracking for a non-minimum phase hypersonic vehicle model[J]. Automatica, 2012, 48 (7): 1248- 1261.
doi: 10.1016/j.automatica.2012.04.006 |
| 30 |
CHEN M , TAO G , JIANG B . Dynamic surface control using neural networks for a class of uncertain nonlinear systems with input saturation[J]. IEEE Trans.on Neural Networks and Learning Systems, 2015, 26 (9): 2086- 2097.
doi: 10.1109/TNNLS.2014.2360933 |
| 31 |
SANNER R M , SLOTINE J E . Gaussian networks for direct adaptive control[J]. IEEE Trans.on Neural Networks, 1992, 3 (6): 837- 863.
doi: 10.1109/72.165588 |
| [1] | 孟泠宇, 郭秉礼, 杨雯, 张欣伟, 赵柞青, 黄善国. 基于深度强化学习的网络路由优化方法[J]. 系统工程与电子技术, 2022, 44(7): 2311-2318. |
| [2] | 胥涯杰, 鲜勇, 李邦杰, 任乐亮, 李少朋, 郭玮林. 基于神经网络的高超声速飞行器惯导系统精度提高方法[J]. 系统工程与电子技术, 2022, 44(4): 1301-1309. |
| [3] | 韦俊宝, 李海燕, 李静. 高超声速飞行器新型攻角约束反演控制[J]. 系统工程与电子技术, 2022, 44(4): 1310-1317. |
| [4] | 安通, 王鹏, 王建华, 汤国建, 潘玉龙, 陈海山. 弹性高超声速飞行器动态面制导控制一体化设计方法[J]. 系统工程与电子技术, 2022, 44(3): 956-966. |
| [5] | 张君彪, 熊家军, 兰旭辉, 李凡, 刘文俭, 席秋实. 基于自适应滤波的高超声速滑翔目标三维跟踪算法[J]. 系统工程与电子技术, 2022, 44(2): 628-636. |
| [6] | 刘步花, 丁丹, 杨柳, 薛乃阳, 刘仲谦. 基于DNN的无人机数据OFDM传输技术[J]. 系统工程与电子技术, 2022, 44(2): 696-702. |
| [7] | 许耀华, 朱成龙, 王翊, 蒋芳, 丁梦琴, 王慧平. 基于神经网络的高并行大规模MIMO信号检测算法[J]. 系统工程与电子技术, 2022, 44(12): 3843-3849. |
| [8] | 杨清清, 高盈盈, 郭玙, 夏博远, 杨克巍. 基于深度强化学习的海战场目标搜寻路径规划[J]. 系统工程与电子技术, 2022, 44(11): 3486-3495. |
| [9] | 万齐天, 卢宝刚, 赵雅心, 温求遒. 基于深度强化学习的驾驶仪参数快速整定方法[J]. 系统工程与电子技术, 2022, 44(10): 3190-3199. |
| [10] | 岳彩红, 唐胜景, 郭杰, 王肖, 张浩强. 高超声速伸缩式变形飞行器再入轨迹快速优化[J]. 系统工程与电子技术, 2021, 43(8): 2232-2243. |
| [11] | 胥彪, 李翔, 李爽, 张金鹏. 基于非线性模型预测控制的火星大气进入智能制导方法[J]. 系统工程与电子技术, 2021, 43(7): 1943-1953. |
| [12] | 郭建国, 苏亚鲁. 高超飞行器自适应动态规划的控制系统设计[J]. 系统工程与电子技术, 2021, 43(6): 1628-1635. |
| [13] | 崔邦彦, 田润澜, 王东风, 崔钢, 石静苑. 基于注意力机制和改进CLDNN的雷达辐射源识别[J]. 系统工程与电子技术, 2021, 43(5): 1224-1231. |
| [14] | 高昂, 董志明, 李亮, 宋敬华, 段莉. MADDPG算法并行优先经验回放机制[J]. 系统工程与电子技术, 2021, 43(2): 420-433. |
| [15] | 马文, 李辉, 王壮, 黄志勇, 吴昭欣, 陈希亮. 基于深度随机博弈的近距空战机动决策[J]. 系统工程与电子技术, 2021, 43(2): 443-451. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||