
系统工程与电子技术 ›› 2022, Vol. 44 ›› Issue (4): 1301-1309.doi: 10.12305/j.issn.1001-506X.2022.04.28
胥涯杰1, 鲜勇1,*, 李邦杰1, 任乐亮1, 李少朋1, 郭玮林2
收稿日期:2021-03-25
出版日期:2022-04-01
发布日期:2022-04-01
通讯作者:
鲜勇
作者简介:胥涯杰(1997—), 男, 硕士研究生, 主要研究方向为飞行器设计、制导理论|鲜勇(1972—), 男, 教授, 博士, 主要研究方向为飞行器设计、导航与制导理论|李邦杰(1978—), 男, 教授, 博士, 主要研究方向为飞行器设计、制导理论|任乐亮(1995—), 男, 博士研究生, 主要研究方向为导航、制导理论|李少朋(1991—), 男, 讲师, 博士, 主要研究方向为导航、制导理论|郭玮林(1991—), 男, 助理工程师, 博士, 主要研究方向为飞行器设计、制导理论
Yajie XU1, Yong XIAN1,*, Bangjie LI1, Leliang REN1, Shaopeng LI1, Weilin GUO2
Received:2021-03-25
Online:2022-04-01
Published:2022-04-01
Contact:
Yong XIAN
摘要:
针对目前惯性系统误差补偿模型对静态误差和动态误差处理能力不足的问题, 为适应高超声速飞行器长航时、高精度的惯性导航要求, 基于神经网络提出一种加速度计拟合模型。在高超声速飞行器飞行前期有准确的卫星导航信息时, 收集导航信息和加速度计脉冲信息, 利用神经网络强大的非线性拟合能力, 在飞行过程中进行在线训练, 得到精确的惯性系统模型。仿真结果表明, 在存在逐次通电误差和不考虑二次项误差系数的误差补偿模型方法位置导航偏差在数公里和数百米量级的情况下, 相同时间内所提方法的位置导航偏差仅为数十米量级, 有效提高了高超声速飞行器的导航精度。
中图分类号:
胥涯杰, 鲜勇, 李邦杰, 任乐亮, 李少朋, 郭玮林. 基于神经网络的高超声速飞行器惯导系统精度提高方法[J]. 系统工程与电子技术, 2022, 44(4): 1301-1309.
Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network[J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309.
图1
捷联惯导计算模型"
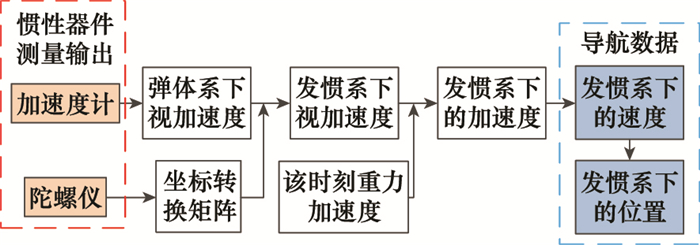

图2
BPNN训练模型"
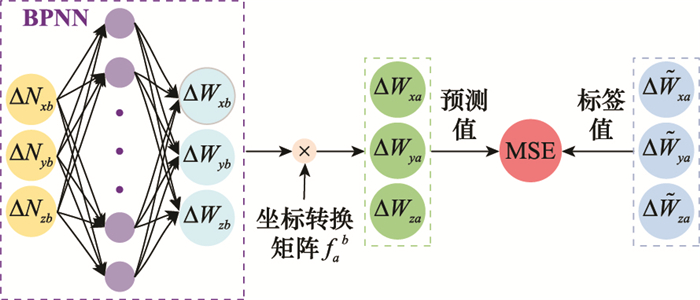
表1
不同隐藏层节点的训练效果"
| 节点数 | 训练误差 | ||
| X方向 | Y方向 | Z方向 | |
| 4 | 5.50×10-6 | 8.33×10-7 | 3.45×10-7 |
| 5 | 5.08×10-6 | 1.52×10-6 | 2.02×10-7 |
| 6 | 1.54×10-6 | 4.04×10-7 | 9.37×10-8 |
| 7 | 2.30×10-4 | 5.44×10-5 | 7.78×10-6 |
| 8 | 2.85×10-5 | 4.58×10-5 | 1.95×10-5 |
| 9 | 3.53×10-6 | 8.17×10-7 | 6.26×10-8 |
| 10 | 1.47×10-3 | 2.23×10-5 | 2.28×10-5 |
| 11 | 5.24×10-5 | 1.47×10-5 | 2.61×10-6 |
| 12 | 1.97×10-4 | 2.26×10-5 | 2.15×10-7 |
| 13 | 8.59×10-4 | 4.42×10-5 | 2.86×10-6 |
| 14 | 8.61×10-4 | 1.62×10-5 | 5.82×10-6 |

图3
BPNN结构模型"
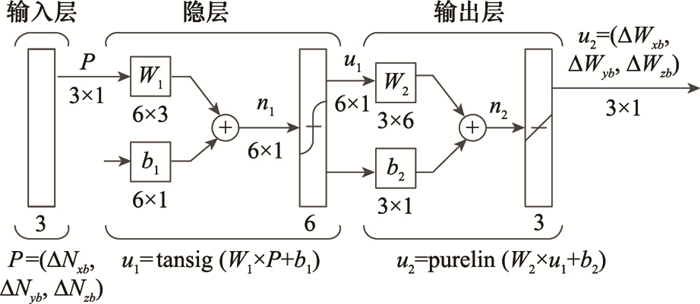
表2
逐次通电误差漂移值(1σ)"
| 误差参数 | 漂移值 | 单位 |
| ΔK0x | 5×10-4 | g |
| ΔK0y | 5×10-4 | g |
| ΔK0z | 5×10-4 | g |
| ΔK1x | 1×10-3 | - |
| ΔK1y | 1×10-4 | - |
| ΔK1z | 1×10-4 | - |
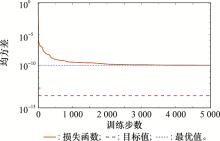
图4
损失函数收敛曲线"
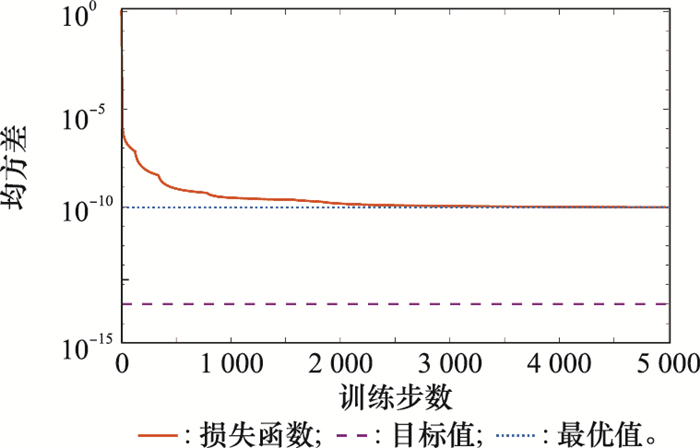
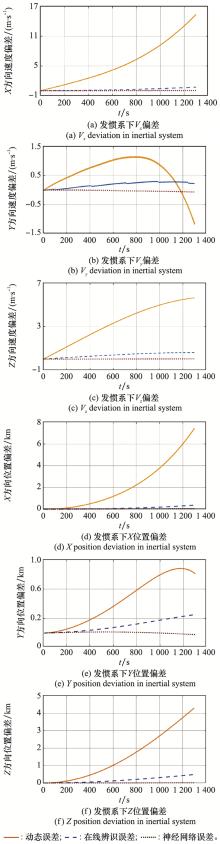
图5
发惯系下速度和位置偏差"
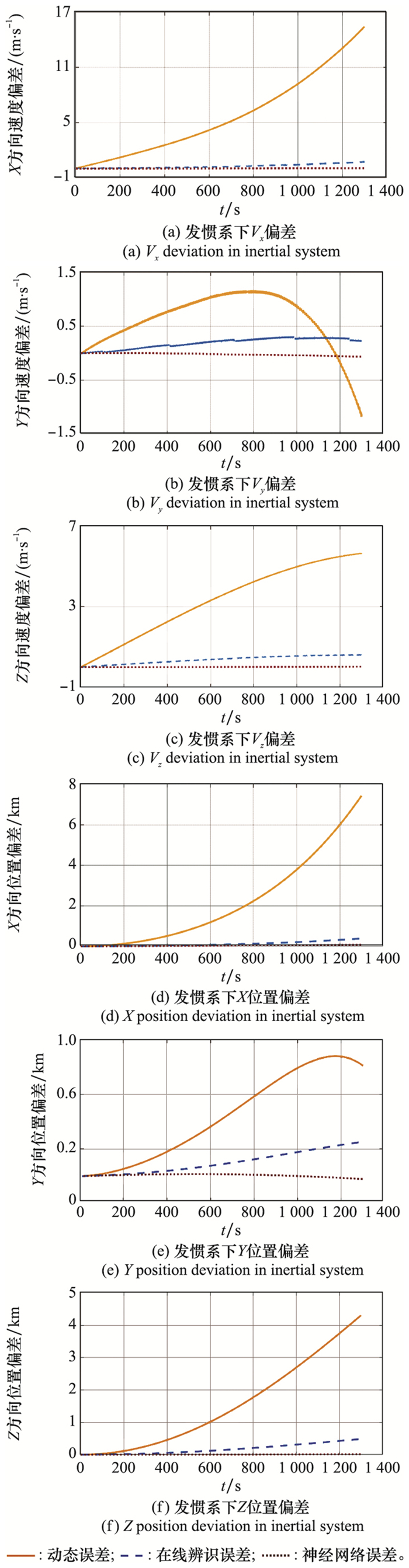
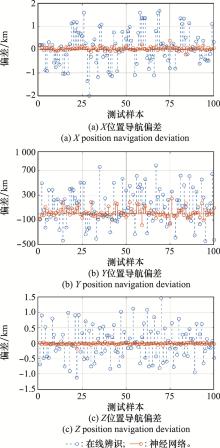
图6
位置导航偏差"
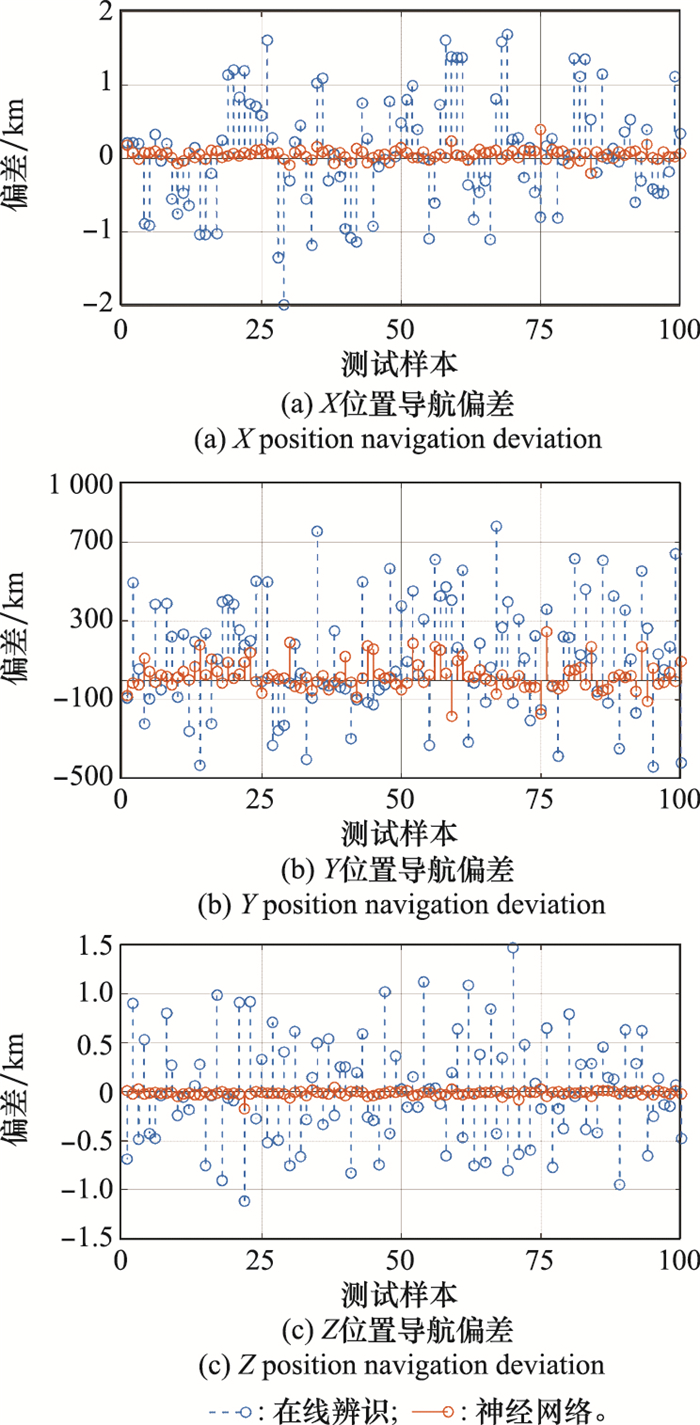
表3
在线辨识方法位置导航偏差分布表"
| 偏差/m | δX | 偏差/m | δY | 偏差/m | δZ | ||
| < 100 | 9 | < 100 | 24 | < 100 | 13 | ||
| < 500 | 48 | < 500 | 90 | < 500 | 62 | ||
| < 1 000 | 73 | < 700 | 98 | < 1 000 | 95 | ||
| < 2 000 | 100 | < 800 | 100 | < 1 500 | 100 |
表4
在线辨识方法位置导航偏差统计表"
| 统计项 | δX | δY | δZ |
| 平均值 | 6.45×102 | 2.59×102 | 4.51×102 |
| 最大值 | 1.98×103 | 7.81×102 | 1.46×103 |
| 标准差 | 4.65×102 | 1.85×102 | 3.12×102 |
表5
基于BPNN的位置导航偏差分布表"
| 偏差/m | δX | 偏差/m | δY | 偏差/m | δZ | ||
| < 10 | 5 | < 10 | 12 | < 10 | 33 | ||
| < 100 | 79 | < 100 | 82 | < 50 | 93 | ||
| < 200 | 98 | < 200 | 99 | < 100 | 99 | ||
| < 400 | 100 | < 300 | 100 | < 200 | 100 |
表6
基于BPNN的位置导航偏差统计表"
| 统计项 | δX | δY | δZ |
| 平均值 | 7.16×10 | 5.56×10 | 2.12×10 |
| 最大值 | 3.87×102 | 2.45×102 | 1.77×102 |
| 标准差 | 5.54×101 | 4.65×101 | 2.25×101 |

图7
神经网络与惯导静态误差的速度和位置偏差"

表7
发惯系下的速度偏差"
| 导航模型 | δVx | δVy | δVz |
| 静态误差 | 2.71×10-1 | 1.51×10-1 | 2.85×10-2 |
| 动态误差 | 1.54 | 1.15 | 5.65 |
| 在线辨识 | 7.25×10-1 | 2.41×10-1 | 6.04×10-1 |
| BPNN | 2.47×10-2 | 6.81×10-2 | 1.79×10-2 |
表8
发惯系下的位置偏差"
| 导航模型 | δX | δY | δZ |
| 静态误差 | 1.51×102 | 1.53×102 | 1.61×102 |
| 动态误差 | 7.43×103 | 8.11×102 | 4.31×103 |
| 在线辨识 | 3.91×102 | 2.52×102 | 4.85×102 |
| BPNN | 8.02×10 | 2.16×10 | 1.04×10 |
| 1 |
SDG A , DQ B , GP C , et al. An aerothermodynamic design optimization framework for hypersonic vehicles[J]. Aerospace Science and Technology, 2019, 84, 339- 347.
doi: 10.1016/j.ast.2018.09.042 |
| 2 | LUO C X , LEI H M , LI J , et al. A new adaptive neural control scheme for hypersonic vehicle with actuators multiple constraints[J]. Nonlinear Dynamics, 2020, 100 (3): 3529- 3553. |
| 3 |
LI K L , HU B Q , CHANG L B , et al. Comparison of direct navigation mode and indirect navigation mode for integrated SINS/GPS[J]. Transactions of the Institute of Measurement and Control, 2016, 38 (1): 3- 13.
doi: 10.1177/0142331214568236 |
| 4 |
LIU P J , WANG B , HOU D D , et al. An approach for DVL-aided SINS in-motion alignment based on observability analysis[J]. IEEE Sensors Journal, 2021, 21 (15): 17131- 17143.
doi: 10.1109/JSEN.2021.3081865 |
| 5 | AKSONENKO P, AVRUTOV V, LAZAREV Y F, et al. Overclocking algorithms for SINS[C]//Proc. of the IEEE International Conference Actual Problems of Unmanned Aerial Vehicles Developments, 2018. |
| 6 | TAO Y , RUI X , YANG F F , et al. Development of a MRE isolation system for strapdown inertial measurement unit[J]. Mechanical Systems and Signal Processing, 2019, 117 (2): 553- 568. |
| 7 | KARINCK D, BA L G, KOLAND L, et al. Honeywell gun-hard inertial measurement unit (IMU) development[C]//Proc. of the Position Location and Navigation Symposium, 2004. |
| 8 | 石文峰, 王省书, 郑佳兴, 等. 激光陀螺捷联惯导系统多位置系统级标定方法[J]. 红外与激光工程, 2016, 45 (11): 99- 106. |
| SHI W F , WANG S S , ZHENG J X , et al. Multi-position systematic calibration method for RLG-SINS[J]. Infrared and Laser Engineering, 2016, 45 (11): 99- 106. | |
| 9 | 王子卉, 程向红, 范时秒. 基于双轴转台的捷联惯性导航系统8位置系统级标定方法[J]. 中国惯性技术学报, 2019, 27 (1): 23- 31. |
| WANG Z H , CHENG X H , FAN S M . Eight-position systema-tic calibration method for SINS based on two-axis turntable with temperature compensation[J]. Journal of Chinese Inertial Technology, 2019, 27 (1): 23- 31. | |
| 10 |
DAI M M , ZHANG C X , LU J Z . In-field calibration method for DTG IMU including g-sensitivity biases[J]. IEEE Sensors Journal, 2019, 19 (13): 4972- 4981.
doi: 10.1109/JSEN.2019.2898104 |
| 11 |
DONG C M , REN S Q , CHEN X J , et al. A separated calibration method for inertial measurement units mounted on three-axis turntables[J]. Sensors, 2018, 18 (9): 2846.
doi: 10.3390/s18092846 |
| 12 | 杨广强, 王志涛, 梁化勇, 等. 基于转台误差隔离的捷联惯导系统尺寸效应参数标定[J]. 中国惯性技术学报, 2020, 28 (1): 15- 19. |
| YANG G Q , WANG Z T , LIANG H Y , et al. Calibration for size effect parameters of SINS based on turntable error isolation[J]. Journal of Chinese Inertial Technology, 2020, 28 (1): 15- 19. | |
| 13 |
KLIMKOVICH B V , TOLOCHKO A M . Consideration for size effect in SINS calibration[J]. Gyroscopy and Navigation, 2015, 6 (3): 230- 235.
doi: 10.1134/S2075108715030074 |
| 14 | GAO P Y , LI K , SONG T X , et al. An accelerometers size effect self-calibration method for tri-axis rotational inertial navigation System[J]. IEEE Trans.on Industrial Electronics, 2017, 65 (2): 1644- 1655. |
| 15 | 孙闯, 任顺清, 王振桓. 加速度计在精密离心机上的标定方法与误差分析[J]. 中国惯性技术学报, 2019, 27 (1): 121- 128. |
| SUN C , REN S Q , WANG Z H . Calibration method of accelero-meter on precision centrifuge and its error analysis[J]. Journal of Chinese Inertial Technology, 2019, 27 (1): 121- 128. | |
| 16 |
NING X L , YUAN W P , LIU Y H . A tightly coupled rotational SINS/CNS integrated navigation method for aircraft[J]. Journal of Systems Engineering and Electronics, 2019, 30 (4): 770- 782.
doi: 10.21629/JSEE.2019.04.14 |
| 17 |
WANG D J , LV H F , AN X Y , et al. A high-accuracy constrained SINS/CNS tight integrated navigation for high-orbit automated transfer vehicles[J]. Acta Astronaut, 2018, 151, 614- 625.
doi: 10.1016/j.actaastro.2018.07.015 |
| 18 | OUYANG W, WU Y X, CHEN H Y. INS/Odometer land navigation by accurate measurement modeling and multiple-model adaptive estimation[C]//Proc. of the 27th Saint Petersburg International Conference on Integrated Navigation Systems, 2020. |
| 19 |
GORKEM S , BILLUR B . Improvements in deterministic error modeling and calibration of inertial sensors and magnetometers[J]. Sensors and Actuators, A. Physical, 2016, 247, 522- 538.
doi: 10.1016/j.sna.2016.06.024 |
| 20 |
ZHAI H Q , WANG L H . The robust residual-based adaptive estimation Kalman filter method for strap-down inertial and geomagnetic tightly integrated navigation system[J]. Review of Scientific Instruments, 2020, 91 (10): 104501.
doi: 10.1063/5.0019305 |
| 21 | XIA X W , SUN Q . An on-line calibration method of star sensor/inertial navigation system for marine[J]. IAENG Internaitonal Journal of Computer Science, 2020, 47 (1): 19- 24. |
| 22 | DU H S, QIAN S, ZHANG Y, et al. Inertial navigation system positioning assisted by star sensor[C]//Proc. of the IEEE International Conference on Control, 2017. |
| 23 |
SHI L , YANG H T , BAI B W , et al. Transmission channel characteristics of relay dual-polarization MIMO system for hypersonic vehicles under plasma sheath[J]. IEEE Trans.on Plasma Science, 2018, 46 (4): 917- 927.
doi: 10.1109/TPS.2018.2811547 |
| 24 | BELHAJEM I, MAISSA Y B, TAMTAOUI A. A hybrid low cost approach using extended Kalman filter and neural networks for real time positioning[C]//Proc. of the IEEE International Conference on Information Technology for Organizations Deve-lopment, 2016. |
| 25 | 郭玮林, 鲜勇, 张大巧, 等. 高超声速飞行器惯导系统误差参数两次优化辨识方法[J]. 控制与决策, 2020, 35 (1): 25- 34. |
| GUO W L , XIAN Y , ZHANG D Q , et al. Quadratic optimization identification research on error parameters of SINS for hypersonic vehicle[J]. Control and Decision, 2020, 35 (1): 25- 34. | |
| 26 |
ZHANG T , ZHU Y Y , ZHOU F , et al. Coarse alignment technology on moving base for SINS based on the improved quaternion filter algorithm[J]. Sensors, 2017, 17 (6): 1424.
doi: 10.3390/s17061424 |
| 27 |
QIU Z B , QIAN H M . Modified multiplicative quaternion cubature Kalman filter for attitude estimation[J]. International Journal of Adaptive Control and Signal Processing, 2018, 32 (8): 1182- 1190.
doi: 10.1002/acs.2895 |
| 28 |
REGIMANU B , DAS I C , RAO K S . Development of multistage digital filters for dither signal removal in ring laser gyro[J]. Frequenz, 2019, 73 (3-4): 123- 130.
doi: 10.1515/freq-2018-0195 |
| 29 | SCHWARTZ S, GUTTY F, FE U G, et al. Solid-state ring laser gyro for aerospace applications[C]//Proc. of the Society of Photo-optical Instrumentation Engineers Conference Series, 2017. |
| 30 | 鲜勇, 李邦杰, 雷刚, 等. 弹道导弹精度分析方法[M]. 长沙: 国防科技大学出版社, 2012: 93- 94. |
| XIAN Y , LI B J , LEI G , et al. Ballistic missile precision analy-sis method[M]. Changsha: National University of Defense Technology Press, 2012: 93- 94. | |
| 31 | ZOUHAIR C , NOUREDDINE A , KHALID M , et al. A novel architecture combined with optimal parameters for back propagation neural networks applied to anomaly network intrusion detection[J]. Computers & Security, 2018, 75 (6): 36- 58. |
| 32 |
RUBIO J . Stability analysis of the modified Levenberg-Marquardt algorithm for the artificial neural network training[J]. IEEE Trans.on Neural Networks and Learning Systems, 2021, 32 (8): 3510- 3524.
doi: 10.1109/TNNLS.2020.3015200 |
| 33 | 赵林东. 高超声速飞行器建模及巡航跟踪控制技术研究[D]. 北京: 北京理工大学, 2015. |
| ZHAO L D. Research on modeling and tracking control technology for hypersonic vehicle during cruise phase[D]. Beijing: Beijing Institute of Technology, 2015. |
| [1] | 宋爽, 张悦, 张琳娜, 岑翼刚, 李浥东. 基于深度学习的轻量化目标检测算法[J]. 系统工程与电子技术, 2022, 44(9): 2716-2725. |
| [2] | 聂倩, 杨丽花, 呼博, 任露露. 基扩展模型下基于LSTM神经网络的时变信道预测方法[J]. 系统工程与电子技术, 2022, 44(9): 2971-2977. |
| [3] | 王健, 何自豪, 刘洁, 杨珂. 基于梯度域导向滤波器和改进PCNN的图像融合算法[J]. 系统工程与电子技术, 2022, 44(8): 2381-2392. |
| [4] | 王彩云, 吴钇达, 王佳宁, 马璐, 赵焕玥. 基于改进的CNN和数据增强的SAR目标识别[J]. 系统工程与电子技术, 2022, 44(8): 2483-2487. |
| [5] | 王冠, 茹海忠, 张大力, 马广程, 夏红伟. 弹性高超声速飞行器智能控制系统设计[J]. 系统工程与电子技术, 2022, 44(7): 2276-2285. |
| [6] | 樊成, 王布宏, 田继伟. 基于多任务学习图卷积模型的航空网络节点分类[J]. 系统工程与电子技术, 2022, 44(7): 2341-2349. |
| [7] | 金国栋, 薛远亮, 谭力宁, 许剑锟. 基于孪生神经网络的目标跟踪算法进展研究[J]. 系统工程与电子技术, 2022, 44(6): 1805-1822. |
| [8] | 韦娟, 杨皇卫, 宁方立. 基于NMF与CNN联合优化的声学场景分类[J]. 系统工程与电子技术, 2022, 44(5): 1433-1438. |
| [9] | 陈冬, 句彦伟. 基于语义分割实现的SAR图像舰船目标检测[J]. 系统工程与电子技术, 2022, 44(4): 1195-1201. |
| [10] | 张普, 薛惠锋, 高山, 左轩. 具有混合执行器故障的多智能体分布式有限时间自适应协同容错控制[J]. 系统工程与电子技术, 2022, 44(4): 1220-1229. |
| [11] | 韦俊宝, 李海燕, 李静. 高超声速飞行器新型攻角约束反演控制[J]. 系统工程与电子技术, 2022, 44(4): 1310-1317. |
| [12] | 方伟, 王玉, 闫文君, 林冲. 基于神经网络的符号化飞行动作识别[J]. 系统工程与电子技术, 2022, 44(3): 737-745. |
| [13] | 孙晶明, 虞盛康, 孙俊. 基于深度学习的HRRP识别姿态敏感性分析[J]. 系统工程与电子技术, 2022, 44(3): 802-807. |
| [14] | 张心宇, 刘源, 宋佳凝. 基于LSTM神经网络的短期轨道预报[J]. 系统工程与电子技术, 2022, 44(3): 939-947. |
| [15] | 安通, 王鹏, 王建华, 汤国建, 潘玉龙, 陈海山. 弹性高超声速飞行器动态面制导控制一体化设计方法[J]. 系统工程与电子技术, 2022, 44(3): 956-966. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||