Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (1): 202-209.doi: 10.12305/j.issn.1001-506X.2023.01.24
• Guidance, Navigation and Control • Previous Articles
High-precision positioning algorithm for UAV based on random forest weight compensation
Kun FANG1,2,*, Xiaohui LI1, Tao FAN1
- 1. State Key Laboratory of Integrated Business Network, Xidian University, Xi'an 710071, China
2. Henan Branch of National Computer Network and Information Security Management Center, Zhengzhou 450000, China
-
Received:2021-04-26Online:2023-01-01Published:2023-01-03 -
Contact:Kun FANG
CLC Number:
Cite this article
Kun FANG, Xiaohui LI, Tao FAN. High-precision positioning algorithm for UAV based on random forest weight compensation[J]. Systems Engineering and Electronics, 2023, 45(1): 202-209.
share this article
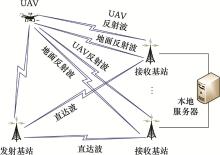
Fig.1
System model"

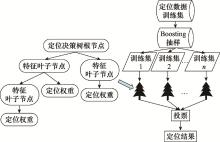
Fig.2
Random forest establishment process"
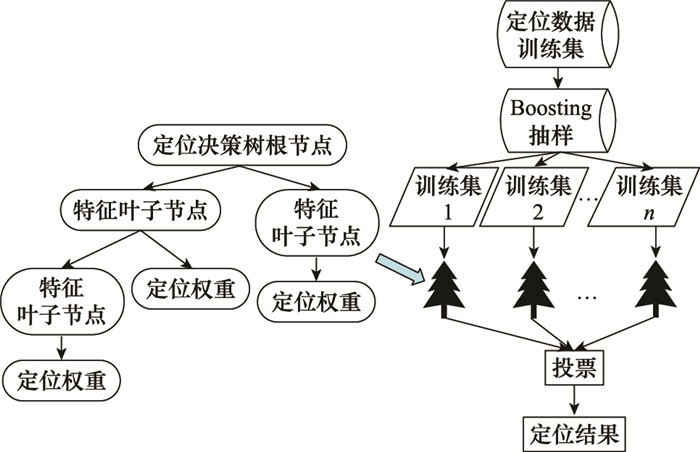
Table 1
Binary confusion matrix"
| 分类 | 正确判断 | 错误判断 |
| 正确分类 | TP | FN |
| 错误分类 | FP | TN |
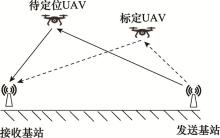
Fig.3
Error calibration"
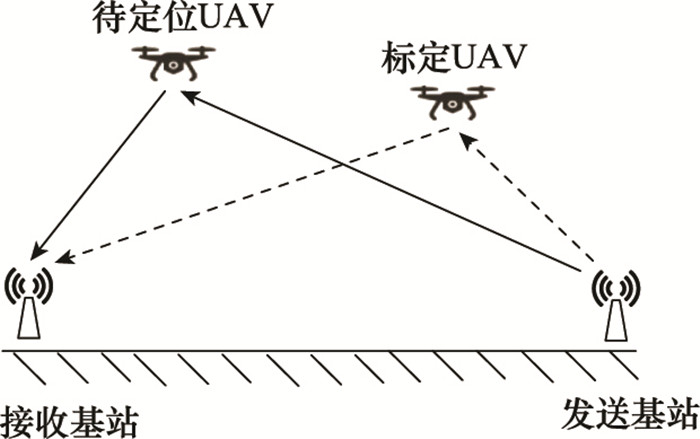
Table 2
Simulation parameters"
| 参数 | 值 |
| 基站距离/m | 1 000 |
| 信道类型 | 视距/非视距 |
| 检测空间直径/m | 300 |
| 载频/GHz | 2 |
Table 3
Precision analysis of decision tree for target coordinate location %"
| 评价标准 | X-轴 | Y-轴 | Z-轴 |
| 召回率 | 74.54 | 89.62 | 86.06 |
| 精确率 | 90.73 | 83.50 | 87.45 |
| 检测值 | 81.85 | 86.45 | 86.75 |
| Evalue | 94.85 | 95.02 | 89.28 |
| Fvalue | 93.05 |
Table 4
Algorithm run time comparison"
| 算法 | 定位误差均值/m | 定位所用时间/s |
| 文献[ | 5.13 | 0.006 364 89 |
| 文献[ | 8.96 | 0.005 394 62 |
| 文献[ | 7.64 | 0.006 594 82 |
| 本文算法 | 4.58 | 0.006 782 88 |
| 文献[ | 4.68 | 0.008 568 16 |
| 文献[ | 4.96 | 0.009 765 92 |
Fig.4
Comparison of UAV positioning performance"
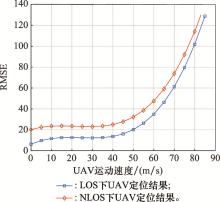
Fig.5
Influence of UAV speed change on positioning result"
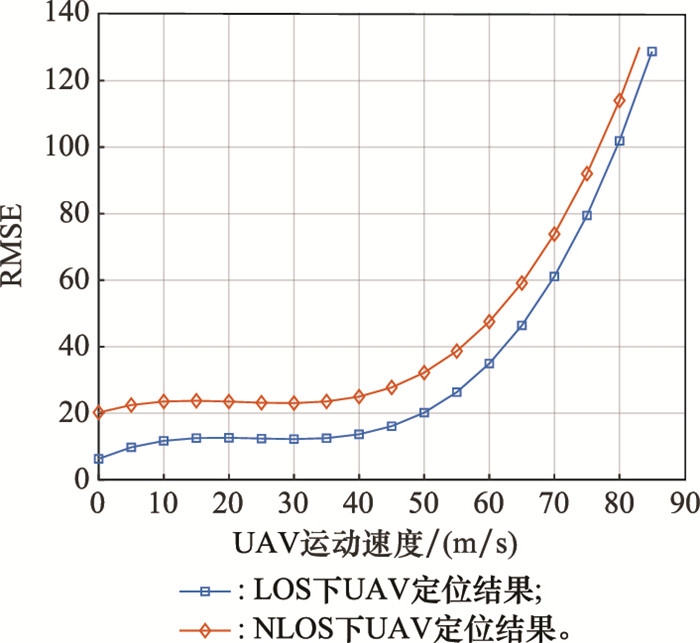
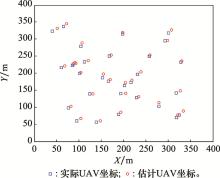
Fig.6
Spatial random target location and detection"

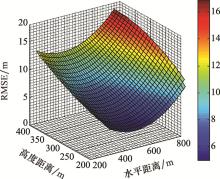
Fig.7
Positioning effect of UAV in three-dimensional space"
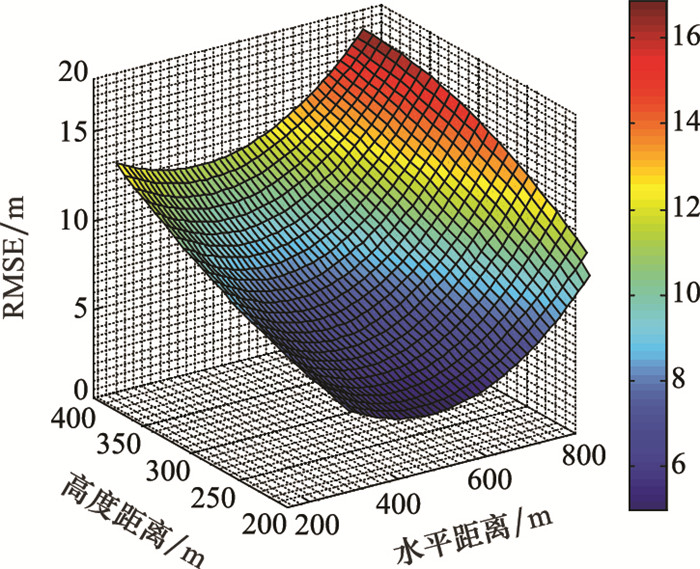
Table 5
Positioning results m"
| 定位点 | 实际坐标 | 估计坐标 |
| 1 | (50, 50, 200) | (49, 50, 196) |
| 2 | (100, 100, 200) | (98, 97, 195) |
| 3 | (150, 150, 200) | (145, 146, 195) |
| 4 | (200, 200, 200) | (198, 199, 196) |
| 5 | (250, 250, 200) | (245, 248, 195) |
| 6 | (50, 80, 50) | (49, 79, 47) |
| 7 | (50, 80, 100) | (49, 79, 97) |
| 8 | (50, 80, 150) | (47, 79, 148) |
| 9 | (50, 80, 200) | (48, 79, 196) |
| 10 | (50, 80, 250) | (48, 78, 245) |
| 1 | XIE Y N, TAO R. Urban-security-oriented low slow small target detection[C]//Proc. of the 2nd International Conference on Instrumentation, Measurement, Computer, Communication and Control, 2012: 1364-1367. |
| 2 |
YE J , ZHANG C , LEI H J , et al. Secure UAV-to-UAV systems with spatially random UAVs[J]. IEEE Wireless Communications Letters, 2019, 8 (2): 564- 567.
doi: 10.1109/LWC.2018.2879842 |
| 3 | SHIMADA M. Model-based polarimetric SAR calibration me-thod using forest and surface scattering targets[C]//Proc. of the IEEE International Geoscience and Remote Sensing Symposium, 2011: 3736-3739. |
| 4 |
LIU H Q , ZHOU Z L , YU L , et al. Two unbiased converted measurement Kalman filtering algorithms with range rate[J]. IET Radar, Sonar Navigation, 2018, 12 (11): 1217- 1224.
doi: 10.1049/iet-rsn.2018.5154 |
| 5 |
KIM O , HONG D , KIM J , et al. Experimental study of single-transmitter-based precise indoor positioning system[J]. IEEE Access, 2020, 8, 89919- 89934.
doi: 10.1109/ACCESS.2020.2993865 |
| 6 | STOJCSICS D, LOVAS I, DOMOZI Z, et al. High resolution 3D thermal Imaging using FLIR DUO R Sensor[C]//Proc. of the IEEE 22nd International Conference on Intelligent Engineering Systems, 2018: 311-316. |
| 7 |
KOIVISTO M , HAKKARAINEN A , COSTA M . High-efficiency device positioning and location-aware communications in dense 5G networks[J]. IEEE Communications Magazine, 2017, 55 (8): 188- 195.
doi: 10.1109/MCOM.2017.1600655 |
| 8 |
CARRILLO L , FANTONI I , RONDON E , et al. Three-dimensional position and velocity regulation of a quad-rotorcraft using optical flow[J]. IEEE Trans.on Aerospace and Electronic Systems, 2015, 51 (1): 358- 371.
doi: 10.1109/TAES.2014.130607 |
| 9 |
CHEN C Y , WU W R . Three-dimensional positioning for LTE systems[J]. IEEE Trans.on Vehicular Technology, 2017, 66 (4): 3220- 3234.
doi: 10.1109/TVT.2016.2593697 |
| 10 |
SU J X , YAO Z , LU M Q . An improved position determination algorithm based on nonlinear compensation for ground-based positioning systems[J]. IEEE Access, 2019, 7, 23675- 23689.
doi: 10.1109/ACCESS.2019.2899650 |
| 11 |
WANG B Y , GAN X L , LIU X L , et al. A novel weighted KNN algorithm based on RSS similarity and position distance for Wi-Fi fingerprint positioning[J]. IEEE Access, 2020, 8, 30591- 30602.
doi: 10.1109/ACCESS.2020.2973212 |
| 12 |
WU X H , ZUO W M , LIN L , et al. F-SVM: combination of feature transformation and SVM learning via convex relaxation[J]. IEEE Trans.on Neural Networks and Learning Systems, 2018, 29 (11): 5185- 5199.
doi: 10.1109/TNNLS.2018.2791507 |
| 13 | ZHOU R H, SUN H M, LI H, et al. Time-difference-of-arri val location method of UAV swarms based on Chan-Taylor[C]// Proc. of the 3rd International Conference on Unmanned Systems, 2020: 1161-1166. |
| 14 |
FANG B T . Simple solutions for hyperbolic and related position fixes[J]. IEEE Trans.on Aerospace and Electronic Systems, 1990, 26 (5): 748- 753.
doi: 10.1109/7.102710 |
| 15 | 苏志刚, 武瑞, 郝敬堂. 分布式无源定位技术的定位精度提高方法[J]. 系统工程与电子技术, 2020, 42 (9): 1890- 1896. |
| SU Z G , WU R , HAO J T . Method of improving locating precision of distributed passive localization technology[J]. Systems Engineering and Electronics, 2020, 42 (9): 1890- 1896. | |
| 16 |
WANG Y S , XIA S T , TANG Q T , et al. A novel consistent random forest framework: Bernoulli random forests[J]. IEEE Trans.on Neural Networks and Learning Systems, 2018, 29 (8): 3510- 3523.
doi: 10.1109/TNNLS.2017.2729778 |
| 17 |
QI C X , DIAO J D , QIU L K . On estimating model in feature selection with cross-validation[J]. IEEE Access, 2019, 7, 33454- 33463.
doi: 10.1109/ACCESS.2019.2892062 |
| 18 | 朱斌, 孙斌. 结合分类回归树和K近邻的负载均衡预测算法[J]. 北京邮电大学学报, 2017, 40 (Z1): 93- 97. |
| ZHU B , SUN B . Load balance prediction algorithm combined with classification regression tree and K-nearest neighbor[J]. Journal of Beijing University of Post and Telecommunications, 2017, 40 (Z1): 93- 97. | |
| 19 | LI A G, LUAN F Z. An improved localization algorithm based on CHAN with high positioning accuracy in NLOS-WGN environment[C]//Proc. of the 10th International Conference on Intelligent Human-Machine Systems and Cybernetics, 2018: 332- 335. |
| 20 |
BREIMAN L . Random forests[J]. Machine Learning Archive, 2001, 45 (1): 5- 32.
doi: 10.1023/A:1010933404324 |
| 21 |
LI Z Q , CHENG C Q . Identifying Asphalt pavement distress using UAV LiDAR point cloud data and random forest classification[J]. ISPRS International Journal of Geo-Information, 2019, 8 (1): 39.
doi: 10.3390/ijgi8010039 |
| 22 |
MATHAN K , KUMAR P M , PANCHATCHARAM P , et al. A novel Gini index decision tree data mining method with neural network classifiers for prediction of heart disease[J]. Design Automation for Embedded Systems, 2018, 22 (3): 225- 242.
doi: 10.1007/s10617-018-9205-4 |
| 23 | 余修武, 余昊, 刘永, 等. 基于加权混合滤波和重心法的APIT定位算法[J]. 北京邮电大学学报, 2019, 42 (4): 32- 37. 32-37, 75 |
| YU X W , YU H , LIU Y , et al. APIT localization algorithm based on weighted hybrid filtering and Barycenter method[J]. Journal of Beijing University of Posts and Telecommunications, 2019, 42 (4): 32- 37. 32-37, 75 | |
| 24 |
ZOU Y B , LIU H P , XIE W , et al. Semidefinite programming methods for alleviating sensor position error in TDOA localization[J]. IEEE Access, 2017, 5, 23111- 23120.
doi: 10.1109/ACCESS.2017.2752206 |
| 25 |
ZHAO Y S , HU D X , LIU Z X , et al. Calibrating the transmitter and receiver location errors for moving target localization in multistatic passive radar[J]. IEEE Access, 2019, 7, 118173- 118187.
doi: 10.1109/ACCESS.2019.2932748 |
| 26 |
XIONG H L , MAI Z Z , TANG J , et al. Robust GPS/INS/DVL navigation and positioning method using adaptive federated strong tracking filter based on weighted least square principle[J]. IEEE Access, 2019, 7, 26168- 26178.
doi: 10.1109/ACCESS.2019.2897222 |
| 27 | CHANG H T, BIAN J, WANG C X, et al. A 3D wideband geo- metry-based stochastic model for UAV air-to-ground channels[C]// Proc. of the IEEE Global Communications Conference, 2018: 8647214. |
| 28 |
VORONOVICH A G , ZAVOROTNY V U . Bistatic radar equation for signals of opportunity revisited[J]. IEEE Trans.on Geoscience and Remote Sensing, 2018, 56 (4): 1959- 1968.
doi: 10.1109/TGRS.2017.2771253 |
| 29 |
ABEYWICKRAMA S , ZHANG R , WU Q Q . Intelligent reflecting surface: practical phase shift model and beamforming optimization[J]. IEEE Trans.on Communications, 2020, 68 (9): 5849- 5863.
doi: 10.1109/TCOMM.2020.3001125 |
| 30 | PETO T, MARAK K, BILICZ S, et al. Experimental and numerical studies on scattering from multiple propellers of small UAVs[C]//Proc. of the 12th European Conference on Antennas and Propagation, 2018: 1-4. |
| [1] | Yuhang LUO, Yanxi CHEN, Kunyi GUO, Xinqing SHENG, Jing MA. Target parameter extraction based on neural network and scattering center model [J]. Systems Engineering and Electronics, 2023, 45(1): 9-14. |
| [2] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [3] | Jing YU, Enmi YONG, Hanyang CHEN, Dong HAO, Xiancai ZHANG. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack [J]. Systems Engineering and Electronics, 2022, 44(9): 2849-2857. |
| [4] | Jianfeng YANG, Heye XIAO, Liang LI, Junqiang BAI, Weihao DONG. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism [J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. |
| [5] | Yuanjie LU, Zhimin LIU, Zhixiao SUN, Dong KAN. Model-based integrated evaluation of UAV system architecture [J]. Systems Engineering and Electronics, 2022, 44(4): 1239-1245. |
| [6] | Yuanyuan ZHANG, Yang GAO, Peng ZHU, Jintao LIU, Shushan GU. UAV reconnaissance tactical planning based on colored Petri nets [J]. Systems Engineering and Electronics, 2022, 44(3): 900-907. |
| [7] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [8] | Xueyong YU, Ye ZHU, Lixiang QIU, Hongbo ZHU. Energy efficient offloading strategy for UAV aided edgecomputing systems [J]. Systems Engineering and Electronics, 2022, 44(3): 1022-1029. |
| [9] | Xingjia YANG, Keqing DUAN, Xiang LI, Wei QI. Resolving range ambiguity for cooperative detection using UAV swarms [J]. Systems Engineering and Electronics, 2022, 44(2): 480-489. |
| [10] | Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance [J]. Systems Engineering and Electronics, 2022, 44(2): 529-537. |
| [11] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [12] | Buhua LIU, Dan DING, Liu YANG, Naiyang XUE, Zhongqian LIU. OFDM data transmission technology of UAV based on deep neural network [J]. Systems Engineering and Electronics, 2022, 44(2): 696-702. |
| [13] | Zhipeng WU, Ping ZHANG, Zhen LI, Lei HUANG, Chang LIU, Shuo GAO. Vegetation height inversion method based on light-weighted and small UAV-radar [J]. Systems Engineering and Electronics, 2022, 44(12): 3667-3675. |
| [14] | Yujia WANG, Wei FANG, Tao XU, Yingfu YU, Boyuan DENG. Intelligent decision-making model by unmanned aerial vehicles in sea-to-air confrontation based on genetic fuzzy trees [J]. Systems Engineering and Electronics, 2022, 44(12): 3756-3765. |
| [15] | Wenqi YANG, Jianhua LU, Xu JIANG, Yuanxin WANG. Design of quadrotor attitude active disturbance rejection controller based on improved ESO [J]. Systems Engineering and Electronics, 2022, 44(12): 3792-3799. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||