Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (11): 3505-3514.doi: 10.12305/j.issn.1001-506X.2022.11.26
• Guidance, Navigation and Control • Previous Articles Next Articles
UAV online trajectory planning based on MOEA/D-ARMS
Hanyang WANG1, Liang CHEN2,*, Hai XU2, Jingbo BAI1
- 1. College of Field Engineering, Army Engineering University, Nanjing 210007, China
2. Automobile NCO Academy, Army Military Transportation University, Bengbu 233011, China
-
Received:2021-07-06Online:2022-10-26Published:2022-10-29 -
Contact:Liang CHEN
CLC Number:
Cite this article
Hanyang WANG, Liang CHEN, Hai XU, Jingbo BAI. UAV online trajectory planning based on MOEA/D-ARMS[J]. Systems Engineering and Electronics, 2022, 44(11): 3505-3514.
share this article

Fig.1
Schematic diagram of online trajectory planning"


Fig.2
Schematic diagram of distance cost"


Fig.3
Schematic diagram of threat cost"


Fig.4
Schematic diagram of population evolution process in two-dimensional decision space"


Fig.5
Schematic diagram of encoding method"


Fig.6
Schematic diagram of threat sources distribution"

Table 1
List of threat source parameters km"
| 编号 | μx | μy | σx | σy | 编号 | μx | μy | σx | σy | |
| 1 | -30 | 10 | 3.0 | 3.0 | 10 | -14 | -10 | 2.4 | 2.4 | |
| 2 | 5 | 0 | 3.0 | 3.0 | 11 | -10 | 20 | 3.0 | 3.0 | |
| 3 | 20 | -10 | 3.0 | 3.0 | 12 | 10 | 30 | 2.1 | 2.1 | |
| 4 | 25 | -5 | 3.0 | 3.0 | 13 | -30 | -10 | 3.3 | 3.3 | |
| 5 | 30 | 0 | 2.7 | 2.7 | 14 | -30 | 40 | 3.9 | 3.9 | |
| 6 | 30 | -40 | 3.0 | 3.0 | 15 | 20 | 20 | 4.5 | 4.5 | |
| 7 | -10 | 40 | 3.0 | 3.0 | 16 | 10 | -20 | 4.5 | 4.5 | |
| 8 | -20 | -30 | 2.7 | 2.7 | 17 | 30 | 40 | 3.0 | 3.0 | |
| 9 | 0 | -30 | 2.1 | 2.1 | - | - | - | - | - |

Fig.7
Trajectory with(ω1, ω2)T=(0.3, 0.7)T under static threat"


Fig.8
Trajectory with (ω1, ω2)T=(0.7, 0.3)T under static threat"


Fig.9
Heading angle with(ω1, ω2)T=(0.3, 0.7)T under static threat"

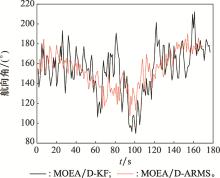
Fig.10
Heading angle with(ω1, ω2)T=(0.7, 0.3)T under static threat"

Table 2
Comparison of planning results under static threat"
| 偏好 | 规划方法 | 飞行时间/s | 生存概率 | 航向角变化平均值/(°) |
| (ω1, ω2)T=(0.3, 0.7)T | MOEA/D-ARMS | 180 | 0.972 | 7.586 |
| MOEA/D-KF | 186 | 0.969 | 13.029 | |
| (ω1, ω2)T=(0.7, 0.3)T | MOEA/D-ARMS | 169 | 0.934 | 8.000 |
| MOEA/D-KF | 176 | 0.920 | 11.741 |

Fig.11
Trajectory with(ω1, ω2)T=(0.3, 0.7)T under sudden threat"
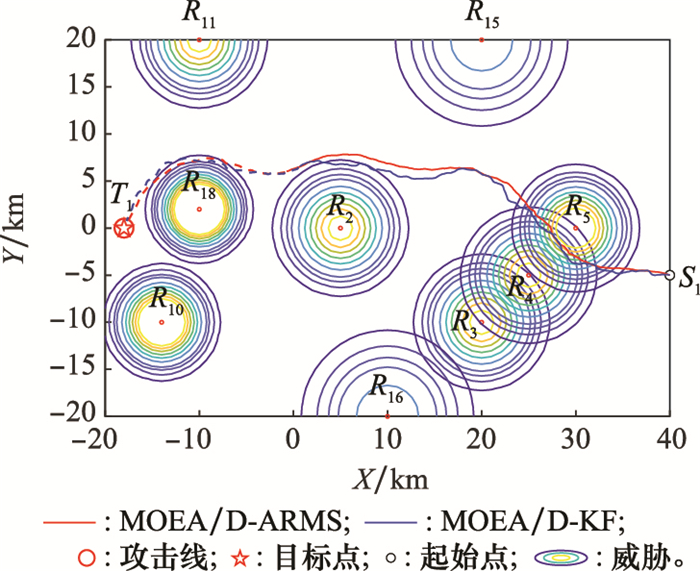
Fig.12
Trajectory with(ω1, ω2)T=(0.7, 0.3)T under sudden threat"

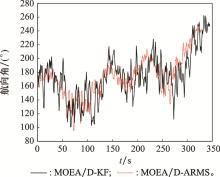
Fig.13
Heading angle with(ω1, ω2)T=(0.3, 0.7)T under sudden threat"


Fig.14
Heading angle with(ω1, ω2)T=(0.7, 0.3)T under sudden threat"

Table 3
Comparison of planning results under sudden threat"
| 偏好 | 规划方法 | 飞行时间/s | 生存概率 | 航向角变化平均值/(°) |
| (ω1, ω2)T=(0.3, 0.7)T | MOEA/D-ARMS | 330 | 0.973 | 7.82 |
| MOEA/D-KF | 344 | 0.950 | 12.68 | |
| (ω1, ω2)T=(0.7, 0.3)T | MOEA/D-ARMS | 315 | 0.884 | 7.45 |
| MOEA/D-KF | 336 | 0.855 | 13.22 |

Fig.15
Trajectory with (ω1, ω2)T=(0.3, 0.7)T under mutation threat"

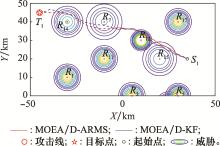
Fig.16
Trajectory with(ω1, ω2)T=(0.7, 0.3)T under mutation threat"


Fig.17
Heading angle with(ω1, ω2)T=(0.3, 0.7)T under mutation threat"
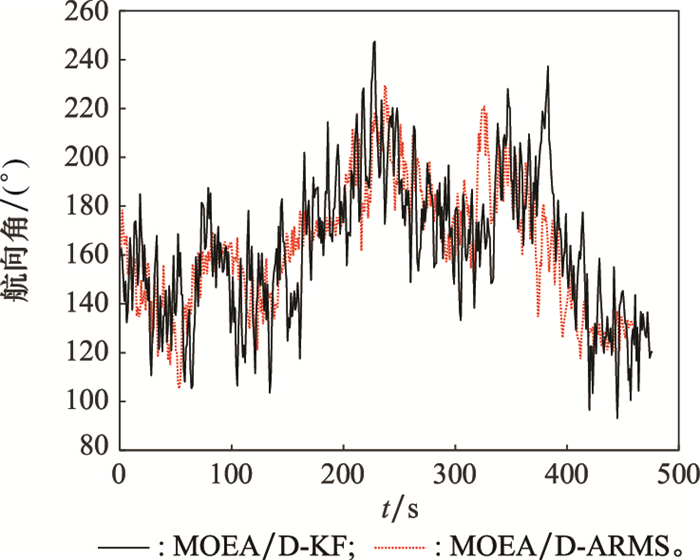

Fig.18
Heading angle with(ω1, ω2)T=(0.7, 0.3)T under mutation threat"

Table 4
Comparison of planning results under mutation threat"
| 偏好 | 规划方法 | 飞行时间/s | 生存概率 | 航向角变化平均值/(°) |
| (ω1, ω2)T=(0.3, 0.7)T | MOEA/D-ARMS | 460 | 0.931 | 7.49 |
| MOEA/D-KF | 475 | 0.912 | 12.26 | |
| (ω1, ω2)T=(0.7, 0.3)T | MOEA/D-ARMS | 430 | 0.837 | 7.03 |
| MOEA/D-KF | 443 | 0.809 | 11.93 |
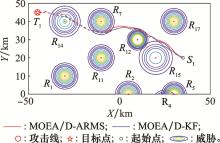
Fig.19
Trajectory planning under preference change"
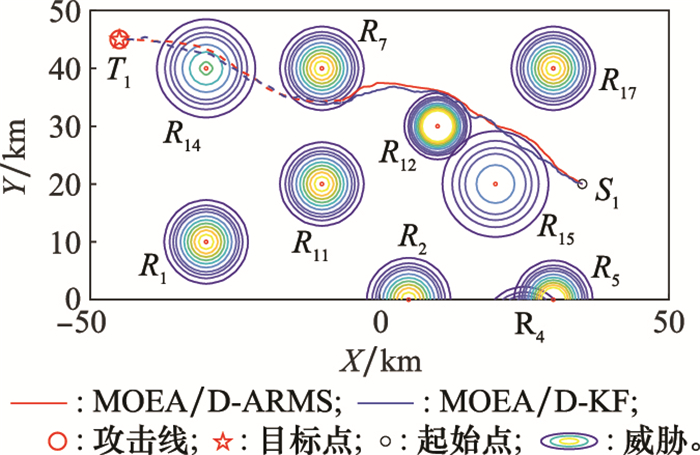

Fig.20
Heading angle under preference change"

Table 5
Comparison of planning results under preference change"
| 偏好 | 规划方法 | 飞行时间/s | 生存概率 | 航向角变化平均值/(°) |
| (ω1, ω2)T=(0.3, 0.7)T | MOEA/D-ARMS | 442 | 0.896 | 6.42 |
| (ω1, ω2)T=(0.7, 0.3)T | MOEA/D-KF | 450 | 0.871 | 12.16 |
| 1 | 周德云, 王鹏飞, 李枭扬, 等. 基于多目标优化算法的多无人机协同航迹规划[J]. 系统工程与电子技术, 2017, 39 (4): 782- 787. |
| ZHOU D Y , WANG P F , LI X Y , et al. Cooperative path planning of multi-UAV based on multi-objective optimization algorithm[J]. Systems Engineering & Electronics, 2017, 39 (4): 782- 787. | |
| 2 | XU Z , ZHANG E Z , CHEN Q W . Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization[J]. Journal of Systems Engineering and Electronics, 2020, 31 (1): 130- 141. |
| 3 |
袁梦顺, 陈谋, 吴庆宪. 基于NSGA-Ⅲ算法的多无人机协同航迹规划[J]. 吉林大学学报(信息科学版), 2021, 39 (3): 295- 302.
doi: 10.3969/j.issn.1671-5896.2021.03.010 |
|
YUAN M S , CHEN M , WU Q X . Cooperative path planning for multiple UAVs based on NSGA-Ⅲ algorithm[J]. Journal of Jilin University (Information Science Edition), 2021, 39 (3): 295- 302.
doi: 10.3969/j.issn.1671-5896.2021.03.010 |
|
| 4 |
DEB K , JAIN H . An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part Ⅰ: solving problems with box constraints[J]. IEEE Trans.on Evolutionary Computation, 2014, 18 (4): 577- 601.
doi: 10.1109/TEVC.2013.2281535 |
| 5 | 李波, 屈原, 徐向丽. 基于MPC-PSO的无人机在线航迹规划[J]. 内蒙古大学学报(自然科学版), 2018, 49 (5): 540- 546. |
| LI B , QU Y , XU X L . UAV on-line path planning based on model predictive control and particle swarm optimization in complex dynamic environment[J]. Journal of Inner Mongolia University (Natural Science Edition), 2018, 49 (5): 540- 546. | |
| 6 | 陈都, 孟秀云. 基于改进ARA*算法的无人机在线航迹规划[J]. 飞行力学, 2021, 39 (1): 60- 65. |
| CHEN D , MENG X Y . UAV online path planning based on improved ARA* algorithm[J]. Flight Dynamics, 2021, 39 (1): 60- 65. | |
| 7 | 张显炀, 林浩申, 马霄龙, 等. 突现威胁下无人机在线航迹规划方法研究[J]. 计算机仿真, 2019, 36, 81- 84.81-84, 180 |
| ZHANG X S , LIN H S , MA X L , et al. The research of online route planning method under sudden threat for UAV[J]. Computer Simulation, 2019, 36, 81- 84.81-84, 180 | |
| 8 | 彭星光. 面向无人系统的动态进化算法及应用[M]. 北京: 科学出版社, 2017. |
| PENG X G . Dynamic evolutionary algorithm for unmanned system and its application[M]. Beijing: Science Press, 2017. | |
| 9 | RONG M , GONG D W , PEDRYCZ W , et al. A multimodel prediction method for dynamic multiobjective evolutionary optimization[J]. IEEE Trans.on Evolutionary Computation, 2020, 24 (2): 290- 304. |
| 10 | LIANG Z P , ZHENG S X , ZHU Z X , et al. Hybrid of memory and prediction strategies for dynamic multiobjective optimization[J]. Information Sciences, 2019, 485, 200- 218. |
| 11 | AZZOUZ R , BECHIKH S , SAID L B . A dynamic multi-objective evolutionary algorithm using a change severity-based adaptive population management strategy[J]. Soft Computing, 2017, 21 (4): 885- 906. |
| 12 | OU J W , XING L N , LIU M , et al. A novel prediction strategy based on change degree of decision variables for dynamic multi-objective optimization[J]. IEEE Access, 2020, 8, 13362- 13374. |
| 13 | DOGAN A. Probabilistic path planning for UAVs[C]//Proc. of the AIAA "Unmanned Unlimited" Conference and Workshop & Exhibit, 2003. |
| 14 | WANG J , SU Y C , LIN Q E , et al. A survey of decomposition approaches in multiobjective evolutionary algorithms[J]. Neurocomputing, 2020, 408, 308- 330. |
| 15 | MURUGANANTHAM A , TAN K C , VADAKKEPAT P . Evolutionary dynamic multiobjective optimization via Kalman filter prediction[J]. IEEE Trans.on Cybernetics, 2016, 46 (12): 2862- 2873. |
| 16 | MATURANA J , LARDEUX F , SAUBION F . Autonomous operator management for evolutionary algorithms[J]. J Heuristics, 2010, 16 (6): 881- 909. |
| 17 | LIU R C , LI J X , LIU J , et al. A survey on dynamic multi-objective optimization[J]. Chinese Journal of Computers, 2020, 43 (7): 1246- 1278. |
| 18 | LI H , ZHANG Q F . Multiobjective optimization problems with complicated Pareto sets, MOEA/D and NSGA-Ⅱ[J]. IEEE Trans.on Evolutionary Computation, 2009, 13 (2): 284- 302. |
| 19 | JIANG S Y, YANG S X, YAO X, et al. Benchmark problems for CEC2018 competition on dynamic multiobjective optimisa-tion[R]. New York: IEEE, 2018. |
| 20 | FARINA M , DEB K , AMATO P . Dynamic multiobjective optimization problems: test cases, approximations, and applications[J]. IEEE Trans.on Evolutionary Computation, 2004, 8 (5): 425- 442. |
| 21 | GOH C K , TAN K C . A competitive-cooperative coevolutionary paradigm for dynamic multiobjective optimization[J]. IEEE Trans.on Evolutionary Computation, 2009, 13 (1): 103- 127. |
| 22 | ZHOU A M , JIN Y C , ZHANG Q F . A population prediction strategy for evolutionary dynamic multiobjective optimization[J]. IEEE Trans.on Cybernetics, 2014, 44 (1): 40- 53. |
| [1] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [2] | Jing YU, Enmi YONG, Hanyang CHEN, Dong HAO, Xiancai ZHANG. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack [J]. Systems Engineering and Electronics, 2022, 44(9): 2849-2857. |
| [3] | Jianfeng YANG, Heye XIAO, Liang LI, Junqiang BAI, Weihao DONG. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism [J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. |
| [4] | Yuanjie LU, Zhimin LIU, Zhixiao SUN, Dong KAN. Model-based integrated evaluation of UAV system architecture [J]. Systems Engineering and Electronics, 2022, 44(4): 1239-1245. |
| [5] | Yuanyuan ZHANG, Yang GAO, Peng ZHU, Jintao LIU, Shushan GU. UAV reconnaissance tactical planning based on colored Petri nets [J]. Systems Engineering and Electronics, 2022, 44(3): 900-907. |
| [6] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [7] | Xueyong YU, Ye ZHU, Lixiang QIU, Hongbo ZHU. Energy efficient offloading strategy for UAV aided edgecomputing systems [J]. Systems Engineering and Electronics, 2022, 44(3): 1022-1029. |
| [8] | Xingjia YANG, Keqing DUAN, Xiang LI, Wei QI. Resolving range ambiguity for cooperative detection using UAV swarms [J]. Systems Engineering and Electronics, 2022, 44(2): 480-489. |
| [9] | Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance [J]. Systems Engineering and Electronics, 2022, 44(2): 529-537. |
| [10] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [11] | Buhua LIU, Dan DING, Liu YANG, Naiyang XUE, Zhongqian LIU. OFDM data transmission technology of UAV based on deep neural network [J]. Systems Engineering and Electronics, 2022, 44(2): 696-702. |
| [12] | Zhipeng WU, Ping ZHANG, Zhen LI, Lei HUANG, Chang LIU, Shuo GAO. Vegetation height inversion method based on light-weighted and small UAV-radar [J]. Systems Engineering and Electronics, 2022, 44(12): 3667-3675. |
| [13] | Yujia WANG, Wei FANG, Tao XU, Yingfu YU, Boyuan DENG. Intelligent decision-making model by unmanned aerial vehicles in sea-to-air confrontation based on genetic fuzzy trees [J]. Systems Engineering and Electronics, 2022, 44(12): 3756-3765. |
| [14] | Wenqi YANG, Jianhua LU, Xu JIANG, Yuanxin WANG. Design of quadrotor attitude active disturbance rejection controller based on improved ESO [J]. Systems Engineering and Electronics, 2022, 44(12): 3792-3799. |
| [15] | Shuangshuang WANG, Chuntao LI, Zhen WANG, Zikang SU, Fei DAI. Design of carrier landing controller based on adaptive dynamic inversion [J]. Systems Engineering and Electronics, 2022, 44(1): 218-225. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||