Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (9): 2873-2883.doi: 10.12305/j.issn.1001-506X.2023.09.27
• Guidance, Navigation and Control • Previous Articles Next Articles
Multi aircraft cooperative guidance technology considering collision avoidance constraint task allocation
Duo ZHENG1, Yu HAN1,*, Tianyu LU2, Zhichen CHU1
- 1. School of Astronautics, Beijing Institute of Technology, Beijing 100081, China
2. Beijing Aerospace Automatic Control Research Institute, Beijing 100070, China
-
Received:2022-09-06Online:2023-08-30Published:2023-09-05 -
Contact:Yu HAN
CLC Number:
Cite this article
Duo ZHENG, Yu HAN, Tianyu LU, Zhichen CHU. Multi aircraft cooperative guidance technology considering collision avoidance constraint task allocation[J]. Systems Engineering and Electronics, 2023, 45(9): 2873-2883.
share this article
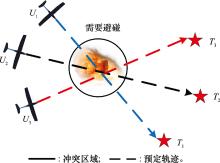
Fig.1
Collaboration and collision avoidance scenarios"


Fig.2
Collision avoidance process of two UAVs"


Fig.3
Maneuver angle solution"

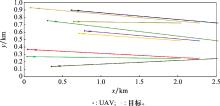
Fig.4
Task allocation result with the shortest total path"


Fig.5
Task allocation considering total distance"


Fig.6
One dimensional first allocation scheme"


Fig.7
One dimensional second allocation scheme"

Table 1
Initial position of UAVs and triangle formation targets"
| UAV id | UAV位置/m | 目标id | 目标位置/m | UAV id | UAV位置/m | 目标id | 目标位置/m | |
| UAV1 | [812, 534] | T1 | [6 660, 900] | UAV19 | [597, 374] | T19 | [7 699, 1 020] | |
| UAV2 | [1 287, 1 641] | T2 | [6 868, 780] | UAV20 | [626, 319] | T20 | [7 699, 1 260] | |
| UAV3 | [507, 1 416] | T3 | [6 868, 1 020] | UAV21 | [1 591, 270] | T21 | [7 699, 1 500] | |
| UAV4 | [248, 1 606] | T4 | [7 076, 660] | UAV22 | [1 674, 818] | T22 | [7 907, 180] | |
| UAV5 | [249, 1 159] | T5 | [7 076, 900] | UAV23 | [85, 716] | T23 | [7 907, 420] | |
| UAV6 | [659, 1 552] | T6 | [7 076, 1 140] | UAV24 | [1 325, 1 530] | T24 | [7 907, 660] | |
| UAV7 | [907, 981] | T7 | [7 284, 540] | UAV25 | [981, 1 335] | T25 | [7 907, 900] | |
| UAV8 | [1 579, 736] | T8 | [7 284, 780] | UAV26 | [1 609, 199] | T26 | [7 907, 1 140] | |
| UAV9 | [809, 1 834] | T9 | [7 284, 1 020] | UAV27 | [547, 183] | T27 | [7 907, 1 380] | |
| UAV10 | [76, 1 851] | T10 | [7 284, 1 260] | UAV28 | [352, 1 396] | T28 | [7 907, 1 620] | |
| UAV11 | [341, 1 301] | T11 | [7 491, 420] | UAV29 | [1 048, 227] | T29 | [8 115, 60] | |
| UAV12 | [1 056, 1 315] | T12 | [7 491, 660] | UAV30 | [1 661, 1 541] | T30 | [8 115, 300] | |
| UAV13 | [650, 1 217] | T13 | [7 491, 900] | UAV31 | [515, 1 079] | T31 | [8 115, 540] | |
| UAV14 | [1 460, 135] | T14 | [7 491, 1 140] | UAV32 | [1 773, 1 388] | T32 | [8 115, 780] | |
| UAV15 | [151, 1 855] | T15 | [7 491, 1 380] | UAV33 | [1 510, 880] | T33 | [8 115, 1 020] | |
| UAV16 | [1 172, 516] | T16 | [7 699, 300] | UAV34 | [847, 1 109] | T34 | [8 115, 1 260] | |
| UAV17 | [726, 320] | T17 | [7 699, 540] | UAV35 | [907, 1 264] | T35 | [8 115, 1 500] | |
| UAV18 | [483, 564] | T18 | [7 699, 780] | UAV36 | [856, 752] | T36 | [8 115, 1 740] |
Table 2
Task allocation results of triangular formation moving targets"
| UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | |||||
| UAV1 | T12 | UAV7 | T25 | UAV13 | T9 | UAV19 | T7 | UAV25 | T14 | UAV31 | T5 | |||||
| UAV2 | T35 | UAV8 | T24 | UAV14 | T29 | UAV20 | T11 | UAV26 | T22 | UAV32 | T26 | |||||
| UAV3 | T10 | UAV9 | T28 | UAV15 | T36 | UAV21 | T23 | UAV27 | T16 | UAV33 | T18 | |||||
| UAV4 | T15 | UAV10 | T21 | UAV16 | T31 | UAV22 | T32 | UAV28 | T6 | UAV34 | T13 | |||||
| UAV5 | T1 | UAV11 | T3 | UAV17 | T17 | UAV23 | T2 | UAV29 | T30 | UAV35 | T19 | |||||
| UAV6 | T27 | UAV12 | T33 | UAV18 | T4 | UAV24 | T20 | UAV30 | T34 | UAV36 | T8 |
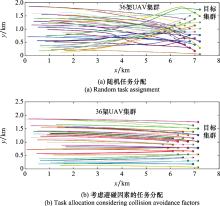
Fig.8
Comparison of results of cooperative attack on triangle formation moving targets by aircraft clusters"


Fig.9
The shortest distance between aircraft when attacking moving targets in triangular formation"
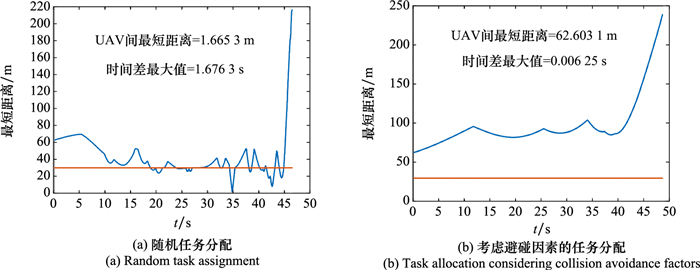
Table 3
Initial position of UAVs and moving targets with random start position"
| UAV id | UAV位置/m | 目标id | 目标位置/m | UAV id | UAV位置/m | 目标id | 目标位置/m | |
| UAV1 | [980, 1 265] | T1 | [6 860, 833] | UAV19 | [437, 896] | T19 | [6 944, 1 300] | |
| UAV2 | [979, 1 398] | T2 | [7 848, 1 586] | UAV20 | [1 238, 747] | T20 | [6 650, 1 227] | |
| UAV3 | [940, 1 889] | T3 | [7 922, 673] | UAV21 | [1 325, 810] | T21 | [7 690, 1 414] | |
| UAV4 | [394, 290] | T4 | [7 461, 262] | UAV22 | [1 230, 1 367] | T22 | [8 171, 1 144] | |
| UAV5 | [197, 214] | T5 | [6 701, 345] | UAV23 | [796, 135] | T23 | [6 531, 318] | |
| UAV6 | [728, 907] | T6 | [7 722, 991] | UAV24 | [596, 864] | T24 | [8 053, 972] | |
| UAV7 | [658, 1 474] | T7 | [6 841, 991] | UAV25 | [486, 455] | T25 | [8 021, 477] | |
| UAV8 | [1 130, 1 490] | T8 | [6 766, 199] | UAV26 | [1 479, 874] | T26 | [7 494, 1 234] | |
| UAV9 | [1 679, 1 851] | T9 | [8 031, 1 109] | UAV27 | [1 598, 804] | T27 | [6 558, 1 206] | |
| UAV10 | [346, 350] | T10 | [8 173, 1 354] | UAV28 | [1 455, 1 459] | T28 | [7 152, 189] | |
| UAV11 | [1 253, 269] | T11 | [7 549, 1 568] | UAV29 | [679, 489] | T29 | [7 381, 447] | |
| UAV12 | [946, 1 055] | T12 | [8 082, 1 880] | UAV30 | [1 423, 1 809] | T30 | [6 722, 470] | |
| UAV13 | [1 550, 973] | T13 | [6 501, 1 658] | UAV31 | [590, 1 308] | T31 | [7 007, 1 069] | |
| UAV14 | [708, 1 309] | T14 | [7 603, 1 882] | UAV32 | [790, 1 600] | T32 | [7 464, 901] | |
| UAV15 | [1 334, 1 036] | T15 | [7 450, 963] | UAV33 | [1 384, 401] | T33 | [6 723, 983] | |
| UAV16 | [626, 370] | T16 | [7 942, 510] | UAV34 | [1 552, 1 882] | T34 | [8 035, 1 673] | |
| UAV17 | [1 055, 572] | T17 | [7 397, 1 722] | UAV35 | [926, 1 692] | T35 | [6 987, 475] | |
| UAV18 | [80, 1 459] | T18 | [7 830, 1 155] | UAV36 | [1 058, 379] | T36 | [7 251, 471] |
Table 4
Task assignment result of striking triangle formation moving target"
| UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | |||||
| UAV1 | T22 | UAV7 | T21 | UAV13 | T6 | UAV19 | T33 | UAV25 | T30 | UAV31 | T27 | |||||
| UAV2 | T20 | UAV8 | T2 | UAV14 | T18 | UAV20 | T3 | UAV26 | T24 | UAV32 | T11 | |||||
| UAV3 | T14 | UAV9 | T17 | UAV15 | T9 | UAV21 | T1 | UAV27 | T32 | UAV33 | T25 | |||||
| UAV4 | T23 | UAV10 | T5 | UAV16 | T35 | UAV22 | T26 | UAV28 | T10 | UAV34 | T12 | |||||
| UAV5 | T8 | UAV11 | T4 | UAV17 | T16 | UAV23 | T28 | UAV29 | T36 | UAV35 | T13 | |||||
| UAV6 | T7 | UAV12 | T31 | UAV18 | T19 | UAV24 | T15 | UAV30 | T34 | UAV36 | T29 |

Fig.10
Comparison of cooperative guidance trajectories of moving targets with random starting position"


Fig.11
Comparison of the shortest distance between aircraft when attacking moving targets with random position"

Table 5
Statistics of collision avoidance results under different conditions"
| 情况分类 | 编队移动目标数量 | 随机起始位置移动目标数量 | ||||||
| N=10 | N=21 | N=36 | N=10 | N=21 | N=36 | |||
| 只有避碰过程 | 无碰撞概率/% | 79.9 | 27.7 | 8.2 | 64.1 | 12.2 | 1.9 | |
| 机间最短距离均值/m | 39.0 | 20.3 | 14.6 | 28.0 | 10.9 | 8.7 | ||
| 冲突时刻概率P/% | 43.0 | 68.4 | 91.3 | 49.2 | 73.8 | 87.2 | ||
| 避碰+任务分配 | 无碰撞概率/% | 99.8 | 98.1 | 76.5 | 99.9 | 98.5 | 75.6 | |
| 机间最短距离均值/m | 87.0 | 76.6 | 46.0 | 85.3 | 73.1 | 47.5 | ||
| 冲突时刻概率P/% | 0.4 | 0.9 | 6.5 | 0.1 | 0.7 | 5.0 | ||
| 1 |
CHEN W F , CHEN J Y , SHAO Z J , et al. Three-dimensional aircraft conflict resolution based on smoothing methods[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (7): 1481- 1490.
doi: 10.2514/1.G001726 |
| 2 | JEREMY O . A space-discretized mixed-integer linear model for air-conflict resolution with speed and heading maneuvers[J]. Computers & Operations Research, 2015, 58 (6): 75- 86. |
| 3 | HILL J C, ARCHIBALD J K, STIRLING W C R L. A multi-agent system architecture for distributed air traffic control[C]//Proc. of the AIAA Guidance, Navigation, and Control Confe-rence, 2005. |
| 4 |
ARCHIBALD J K , HILL J C , JEPSEN N A , et al. A satisficing approach to aircraft conflict resolution[J]. IEEE Trans. on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2008, 38 (4): 510- 521.
doi: 10.1109/TSMCC.2008.919162 |
| 5 | BREITENMOSER A , MARTINOLI A . On combining multi-robot coverage and reciprocal collision avoidance[J]. Distributed Autonomous Robotic Systems, 2016, 112, 49- 64. |
| 6 |
ALONSO-AYUSO A , ESCUDERO L F , MARTIN-CAMPO F J . Collision avoidance in air traffic management: a mixed-integer linear optimization approach[J]. IEEE Trans. on Intelligent Transportation Systems, 2011, 12 (1): 47- 57.
doi: 10.1109/TITS.2010.2061971 |
| 7 | ALONSO-AYUSO A , ESCUDERO L F , MARTIN-CAMPO F J . On modeling the air traffic control coordination in the collision avoidance problem by mixed integer linear optimization[J]. Annals of Operations Research, 2014, 222 (11): 89- 105. |
| 8 | ZHU X M , YI J J , DING H K , et al. Velocity obstacle based on vertical ellipse for multi-robot collision avoidance[J]. Journal of Intelligent & Robotic Systems, 2020, 99, 183- 208. |
| 9 |
杨秀霞, 张毅, 周硙硙, 等. 基于空间障碍球冠的UAV保角映射避碰决策[J]. 华中科技大学学报(自然科学版), 2019, 47 (2): 127- 132.
doi: 10.13245/j.hust.190223 |
|
YANG X X , ZHANG Y , ZHOU W W , et al. Spatial optimal collision avoidance decision for UAV based on spatial obstacle spherical cap[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2019, 47 (2): 127- 132.
doi: 10.13245/j.hust.190223 |
|
| 10 | 杨秀霞, 周硙硙, 张毅. 基于速度障碍圆弧法的UAV自主避障规划研究[J]. 系统工程与电子技术, 2017, 39 (1): 168- 176. |
| YANG X X , ZHOU W W , ZHANG Y . Automatic obstacle avoidance planning for UAV based on velocity obstacle arc method[J]. Journal of Systems Engineering and Electronics, 2017, 39 (1): 168- 176. | |
| 11 | 杨健. 无人机集群系统空域冲突消解方法研究[D]. 长沙: 国防科学技术大学, 2016: 101-123. |
| YANG J. Study on the airspace conflict resolution problem of unmanned aerial vehicle swarm systems[D]. Changsha: National University of Defense Technology, 2016: 101-123. | |
| 12 |
赵毓, 郭继峰, 郑红星, 等. 基于强化学习的多无人机避碰计算制导方法[J]. 导航定位与授时, 2021, 8 (1): 31- 40.
doi: 10.19306/j.cnki.2095-8110.2021.01.004 |
|
ZHAO Y , GUO J F , ZHENG H X , et al. A rein-forcement learning based computational guidance approach for UAVs collision avoid-ance[J]. Navigation Positioning and Timing, 2021, 8 (1): 31- 40.
doi: 10.19306/j.cnki.2095-8110.2021.01.004 |
|
| 13 | LIN J S, CHIU H T, GAU R H. Decentralized planning-assisted deep reinforcement learning for collision and obstacle avoi-dance in UAV networks[C]//Proc. of the IEEE 93rd Vehicular Technology Conference, 2021. |
| 14 | CHOI D, CHHABRA A, KIM D. Collision avoidance of unmanned aerial vehicles using fuzzy inference system-aided enhanced potential field[C]//Proc. of the AIAA Scitech Forum, 2022: 3-7. |
| 15 |
TONY L A , GHOST D , CHAKRAVARTHY A . Unmanned aerial vehicle mid-air collision detection and resolution using avoidance maps[J]. Journal of Aerospace Information Systems, 2021, 18 (8): 506- 529.
doi: 10.2514/1.I010900 |
| 16 |
周洪喜, 张进, 彭晨远, 等. 基于匈牙利算法的多导弹阵地拦截指派规划[J]. 弹箭与制导学报, 2021, 41 (4): 79- 84.
doi: 10.15892/j.cnki.djzdxb.2021.04.018 |
|
ZHOU H X , ZHANG J , PENG C Y , et al. Interception assignment planning of multiple missile positions based on hungarian algorithm[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2021, 41 (4): 79- 84.
doi: 10.15892/j.cnki.djzdxb.2021.04.018 |
|
| 17 | BELLINGHAM J, TILLERSON M, RICHARDS A, et al. Multi-task allocation and path planning for cooperating UAVs[C]//Proc. of the Cooperative Control: Models, Applications and Algorithms, 2001: 23-41. |
| 18 | EUN Y , BANG H . Cooperative task assignment/path planning of multiple unmanned aerial vehicles using genetic algorithm[J]. Journal of Aircraft, 2012, 46 (1): 338- 343. |
| 19 | ZUO Y, PENG Z H and LIU X. Task allocation of multiple UAVs and targets using improved genetic algorithm[C]//Proc. of the 2nd International Conference on Intelligent Control and Information Processing, 2011: 1030-1034. |
| 20 | WEN Y L, LIU L, WANG Z, et al. Multi-UCAVs targets assignment using opposition-based genetic algorithm[C]//Proc. of the 27th Chinese Control and Decision Conference, 2015: 6026-6030. |
| 21 |
DORIGO M , GAMBARDELLA L M . Ant colony system: a cooperative learning approach to the traveling salesman problem[J]. IEEE Trans. on Evolutionary Computation, 1997, 1 (1): 53- 66.
doi: 10.1109/4235.585892 |
| 22 |
CHEN L Z , LIU W L , ZHONG J H . An efficient multi-objective ant colony optimization for task allocation of heterogeneous unmanned aerial vehicles[J]. Journal of Computational Science, 2022, 58, 101545.
doi: 10.1016/j.jocs.2021.101545 |
| 23 | 谢永杰, 多平台防空导弹任务分配及协同制导方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2019. |
| XIE Y J. Research on task assignment and cooperative guidance method of multi platform air defense missile[D]. Harbin: Harbin Institute of Technology, 2019. | |
| 24 |
李文广, 李建增, 胡永江, 等. 基于集中一体化遗传算法的协同航迹规划方法[J]. 火力与指挥控制, 2021, 46 (6): 27- 31.
doi: 10.3969/j.issn.1002-0640.2021.06.005 |
|
LI W G , LI J Z , HU Y J , et al. Cooperative route planning based on centralized integrated genetic algorithm[J]. Fire Control & Command Control, 2021, 46 (6): 27- 31.
doi: 10.3969/j.issn.1002-0640.2021.06.005 |
|
| 25 |
张小孟, 胡永江, 李永科, 等. 一种无人机分层族群任务规划方法[J]. 兵器装备工程学报, 2022, 43 (5): 226- 231.
doi: 10.11809/bqzbgcxb2022.05.036 |
|
ZHANG X M , HU Y J , LI Y K , et al. Hierarchical ethnic mission planning method for UAV[J]. Journal of Ordnance Equipment Engineering, 2022, 43 (5): 226- 231.
doi: 10.11809/bqzbgcxb2022.05.036 |
|
| 26 | 代琪, 何兵, 李明, 等. 基于强化学习的多无人机任务分配方法研究[C]//无人系统高峰论坛, 2021. |
| DAI Q, HE B, LI M, et al. Research on multi UAV task assignment method based on reinforcement learning[C]//Proc. of the Unmanned System Summit Forum, 2021. | |
| 27 |
FEO-FLUSHING E , GAMBARDELLA L M , CARO G . Spatially-distributed missions with heterogeneous multi-robot teams[J]. IEEE Access, 2021, 9, 67327- 67348.
doi: 10.1109/ACCESS.2021.3076919 |
| 28 |
SMITH R G . The contract net protocol: high-level communication and control in a distributed problem solver[J]. IEEE Trans. on Computers, 1980, C-29 (12): 1104- 1113.
doi: 10.1109/TC.1980.1675516 |
| 29 |
谷旭平, 唐大全. 基于细菌觅食算法的多异构无人机任务规划[J]. 系统工程与电子技术, 2021, 43 (11): 3312- 3320.
doi: 10.12305/j.issn.1001-506X.2021.11.32 |
|
GU X P , TANG D Q . Multi-heterogeneous UAV task planning based on baterial foraging algorithm[J]. Systems Engineering and Electronics, 2021, 43 (11): 3312- 3320.
doi: 10.12305/j.issn.1001-506X.2021.11.32 |
|
| 30 | PALMER D, KIRSCHENBAUM M, MURTON J, et al. Decentralized cooperative auction for multiple agent task allocation using synchronized random number generators[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2003, 1963-1968. |
| [1] | Zhongbao WANG, Kuiying YIN. Block effect suppression method of UAV-borne SAR image based on joint domain filtering [J]. Systems Engineering and Electronics, 2023, 45(9): 2768-2776. |
| [2] | Honghai ZHANG, Zhenping REN, Ouge FENG, Fei WANG, Hao LIU. Logistics unmanned aerial vehicle flight plan pre-allocation in urban low-altitude airspace [J]. Systems Engineering and Electronics, 2023, 45(9): 2802-2811. |
| [3] | Yujie LIU, Yue LI, Wei HAN, Kaikai CUI. Trajectory planning for penetration of multi-aircraft for mation based on improved convex optimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(9): 2819-2830. |
| [4] | Yufeng LIANG, Jingchao ZHAO, Wangkui LIU, Lei WANG, Shipeng WANG, Shilong RUAN. Air combat guidance method based on top rolling optimization and bottom tracking [J]. Systems Engineering and Electronics, 2023, 45(9): 2866-2872. |
| [5] | Huizhu HAN, Yangchao HUANG, Hang HU, Qi AN, Shihao LIU. Energy-spectrum efficiency trade-off optimization based on short packet transmission in UAV communication [J]. Systems Engineering and Electronics, 2023, 45(9): 2956-2964. |
| [6] | Xiaogang QI, Yutong ZHOU, Lifang LIU. Evaluation of the reliability of UAV swarm for ground combat missions [J]. Systems Engineering and Electronics, 2023, 45(9): 2971-2978. |
| [7] | Lei SHENG, Manhong SHI, Yingchuan QI, Hao LI, Mingjun PANG. Dynamic offense and defense of UAV swarm based on situation evolution game [J]. Systems Engineering and Electronics, 2023, 45(8): 2332-2342. |
| [8] | Tong XU, Yazhou CHEN, Yuming WANG, Min ZHAO. Research on wideband white noise electromagnetic interference effect of UAV data link [J]. Systems Engineering and Electronics, 2023, 45(7): 1965-1973. |
| [9] | Jun YOU, Ke ZHANG, Zhiguo HAN, Tianxing CAI, Cheng ZHANG. Three-dimensional super-twisting slide mode cooperative guidance law with line-of-sight angle constraint [J]. Systems Engineering and Electronics, 2023, 45(7): 2138-2149. |
| [10] | Liyao WU, Xichao SU, Lei WANG, Zishuang PAN. Research of formation rendezvous control for manned/unmanned aerial vehicles formation [J]. Systems Engineering and Electronics, 2023, 45(7): 2192-2202. |
| [11] | Fengguo WU, Wei TAO, Hui LI, Jianwei ZHANG, Chengchen ZHENG. UAV intelligent avoidance decisions based on deep reinforcement learning algorithm [J]. Systems Engineering and Electronics, 2023, 45(6): 1702-1711. |
| [12] | Hanyu QIAN, Xiaoman TIAN, Bing XIAO, Lu CAO, Rui WANG, Xiwei WU. Balanced task allocation method for distributed satellite swarm game [J]. Systems Engineering and Electronics, 2023, 45(6): 1797-1804. |
| [13] | Xiaocao YANG, Yanli DU, Yunong BU, Yanbin LIU, Cheng GAO. Online three-dimensional RRT* cooperative route planning based on hierarchical decomposition [J]. Systems Engineering and Electronics, 2023, 45(5): 1409-1419. |
| [14] | Jin TANG, Yangang LIANG, Zhihui BAI, Kebo LI. Landing control algorithm of rotor UAV based on DQN [J]. Systems Engineering and Electronics, 2023, 45(5): 1451-1460. |
| [15] | Yang PANG, Ming WANG, Ziyi YAN, Tongyao YUE, Zhe ZHOU. UAV localization method with multi-view fusion [J]. Systems Engineering and Electronics, 2023, 45(4): 1127-1133. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||