Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (9): 2819-2830.doi: 10.12305/j.issn.1001-506X.2023.09.21
• Systems Engineering • Previous Articles Next Articles
Trajectory planning for penetration of multi-aircraft for mation based on improved convex optimization algorithm
Yujie LIU1,2,*, Yue LI3, Wei HAN1, Kaikai CUI4
- 1. Aviation Foundation College, Naval Aeronautical University, Yantai 264001, China
2. Navy Recruiting Office for Student Pilots, Beijing 100071, China
3. Unit 92728 of the PLA, Shanghai 200443, China
4. Unit 92942 of the PLA, Beijing 100161, China
-
Received:2022-06-21Online:2023-08-30Published:2023-09-05 -
Contact:Yujie LIU
CLC Number:
Cite this article
Yujie LIU, Yue LI, Wei HAN, Kaikai CUI. Trajectory planning for penetration of multi-aircraft for mation based on improved convex optimization algorithm[J]. Systems Engineering and Electronics, 2023, 45(9): 2819-2830.
share this article
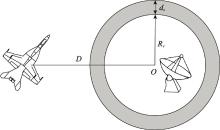
Fig.1
Position relationship between aircraft and radar"
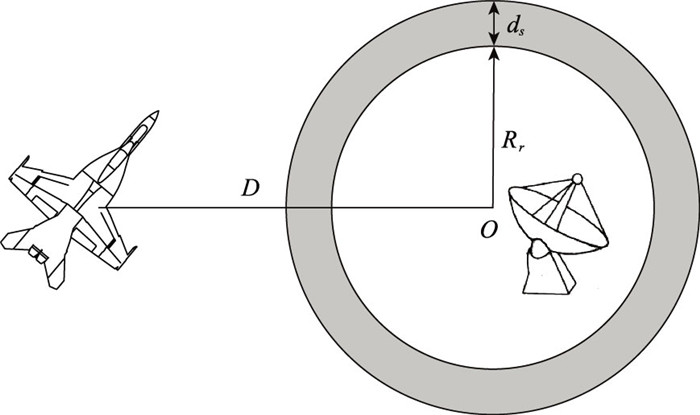

Fig.2
Schematic of various physical quantities in the relative situation indexes of enemy and friend"
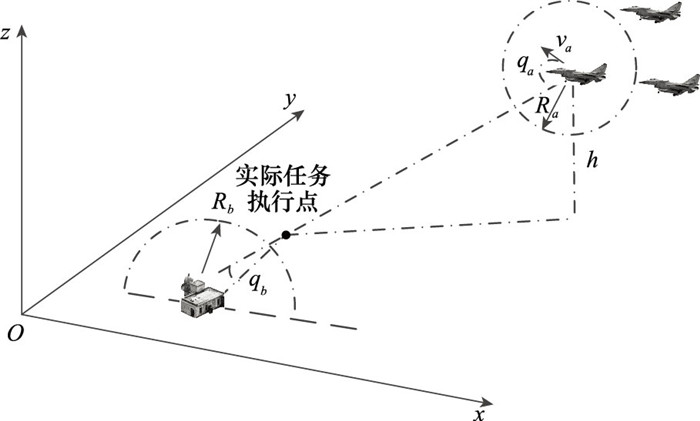
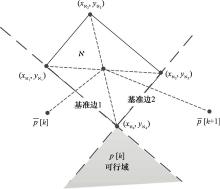
Fig.3
Feasible region of polygon obstacle after convexification"
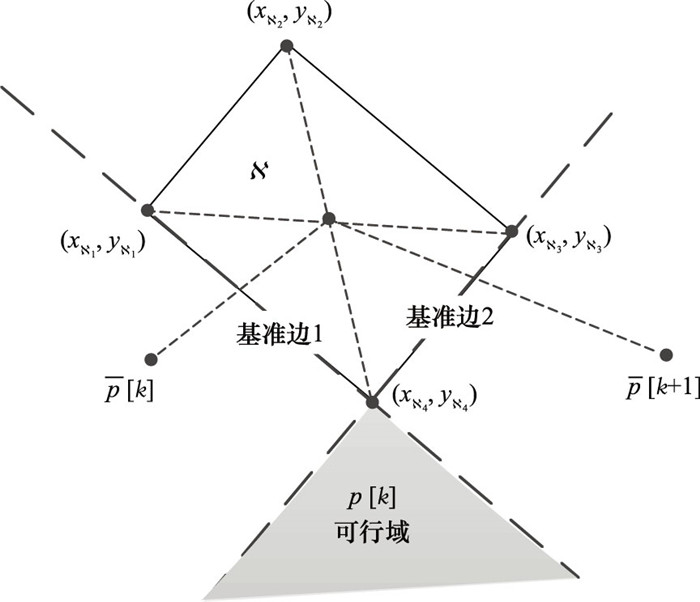
Fig.4
Schematic of obstacle avoidance between groups"
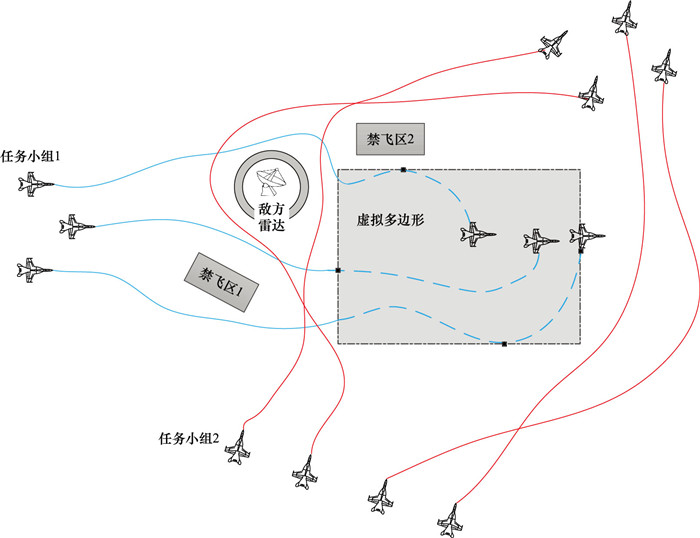
Table 1
Status scale of each task group"
| 物理量 | 任务小组1 | 任务小组2 | 任务小组3 |
| s(t0) | (22 000, 20 000, 5 000, 600, π/6, 0) | (40 000, 5 000, 6 000, 600, π/2, 0) | (1 000, 1 000, 5 000, 600, π/4, 0) |
| (18 000, 20 000, 5 000, 600, π/6, 0) | (38 000, 5 000, 6 000, 600, π/2, 0) | (1 000, 0, 5 000, 600, π/4, 0) | |
| (20 000, 22 000, 5 000, 600, π/6, 0) | (36 000, 5 000, 6 000, 600, π/2, 0) | (0, 0, 5 000, 600, π/4, 0) | |
| (20 000, 18 000, 5 000, 600, π/6, 0) | (42 000, 5 000, 6 000, 600, π/2, 0) | (2 000, 0, 5 000, 600, π/4, 0) | |
| 初始队形 | 菱形 | 横向平行队形 | 菱形 |
| smin | (-∞, -∞, 1 000, 200, -∞, -π/9) | (-∞, -∞, 1 000, 200, -∞, -π/9) | (-∞, -∞, 1 000, 200, -∞, -π/9) |
| smax | (∞, ∞, 10 000, 1 000, -∞, π/9) | (∞, ∞, 10 000, 1 000, -∞, π/9) | (∞, ∞, 10 000, 1 000, -∞, π/9) |
| umin | (-0.4, -4, 0.8) | (-0.6, -8, 0.8) | (-0.2, -2, 0.8) |
| umax | (0.4, 4, 1.2) | (0.6, 8, 1.2) | (0.2, 0.2, 1.2) |
| (0, 0, 0) | (0, 0, 0) | (0, 0, 0) | |
| (0.1, 1, 0.1) | (0.15, 2, 0.1) | (0.05, 0.5, 0.1) | |
| Ra | 3×104 | 6×104 | 3×104 |
| Rc | 5×104 | 7×104 | 6×104 |
Table 2
Information of each subtask"
| 物理量 | 任务小组1 | 任务小组2 | 任务小组3 |
| 真实位置 | (75 000, 65 000, 0) | (70 000, 62 000, 0) | (40 000, 84 000, 0) |
| 任务执行点 | (74 000, 44 000, 1 500, 600, π/2, 0) | (58 000, 58 000, 1 500, 600, 0, 0) | (40 000, 52 000, 2 000, 600, π/2, 0) |
| s(tf) | (74 000, 44 000, 1 500, 600, π/2, 0) | (58 000, 58 000, 1 500, 600, 0, 0) | (40 000, 52 000, 2 000, 600, π/2, 0) |
| (76 000, 45 000, 1 500, 600, π/2, 0) | (60 000, 62 000, 1 500, 600, 0, 0) | (40 000, 50 000, 2 000, 600, π/2, 0) | |
| (77 000, 44 000, 1 500, 600, π/2, 0) | (58 000, 58 000, 1 500, 600, 0, 0) | (40 000, 54 000, 2 000, 600, π/2, 0) | |
| (74 000, 44 000, 1 500, 600, π/2, 0) | (58 000, 64 000, 1 500, 600, 0, 0) | (40 000, 48 000, 2 000, 600, π/2, 0) | |
| 任务执行点队形 | 楔形 | 楔形 | 一字纵向队形 |
| Rb | 4×104 | 2×104 | 5×104 |
| G | 40 | 100 | 80 |
Table 3
Information of obstacle model"
| 物理量 | 雷达1 | 雷达2 | 禁飞区1 | 禁飞区2 |
| 中心坐标 | (78 000, 18 000) | (20 000, 10 000) | - | - |
| Rr+ds | 7 000 | 3 000 | - | - |
| 边界坐标 | - | - | (35 000, 20 000) | (30 000, 35 000) |
| (35 000, 25 000) | (30 000, 45 000) | |||
| (45 000, 25 000) | (33 000, 45 000) | |||
| (45 000, 20 000) | (33 000, 35 000) |
Table 4
Optimization parameter setting"
| 阶段 | 物理量 | 数值 |
| 预规划阶段 | h0 | 2 000 |
| hmax | 10 000 | |
| λ1 | 0.5 | |
| λ2 | -0.5 | |
| 航迹规划阶段 | K | 50 |
| Rmax | 500 | |
| flag | 104 | |
| μin | 0.5 | |
| μeq | 1 | |
| ε1 | (105, 105, 2×103, 100, π, π/6) |
Table 5
Evaluation value of the subtask by the task team"
| 分组 | 子任务1 | 子任务2 | 子任务3 | ||||||||
| ${\bar T}$ | ${\bar C}$ | ${\bar G}$ | ${\bar T}$ | ${\bar C}$ | ${\bar G}$ | ${\bar T}$ | ${\bar C}$ | ${\bar G}$ | |||
| 任务小组1 | 0.056 | -0.03 | 0.4 | 0.046 | -0.03 | 1 | 0.297 | -0.01 | 0.8 | ||
| 任务小组2 | 0.057 | -0.04 | 0.4 | 0.096 | -0.05 | 1 | 0.080 | -0.03 | 0.8 | ||
| 任务小组3 | 0.051 | -0.02 | 0.4 | 0.051 | -0.01 | 1 | 0.135 | 0.02 | 0.8 | ||
Table 6
Comparison of pre-planned trajectory"
| 分组 | 平均求解时间/s | 求解成功率/% | |||
| 实验组 | 对照组 | 实验组 | 对照组 | ||
| 任务小组1 | 16.33 | 17.02 | 100 | 93.33 | |
| 任务小组2 | 12.88 | 12.82 | 100 | 100 | |
| 任务小组3 | 18.26 | 20.76 | 96.67 | 86.67 | |
Fig.5
Pre-planned trajectory of task group 2"
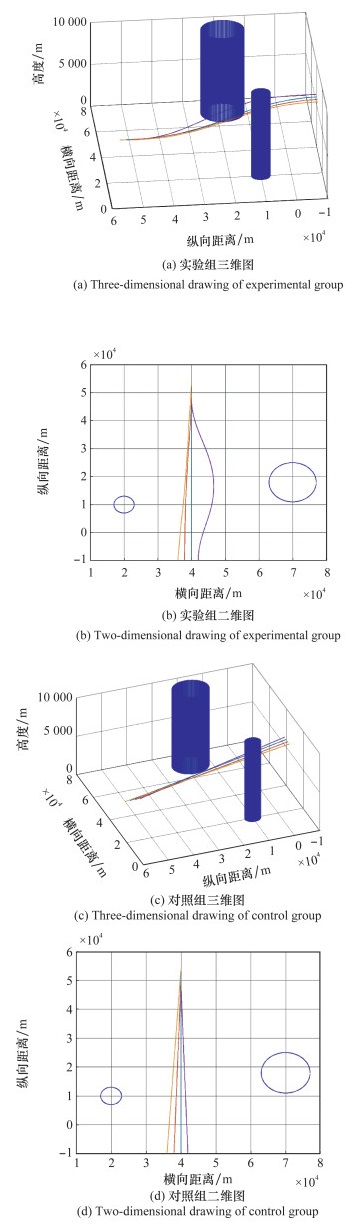
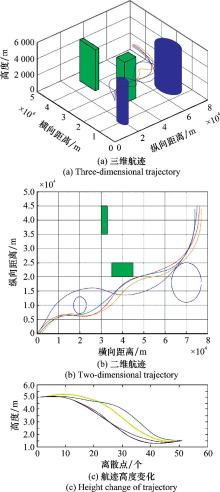
Fig.6
Trajectory change diagram of task group 3 for executing subtask"
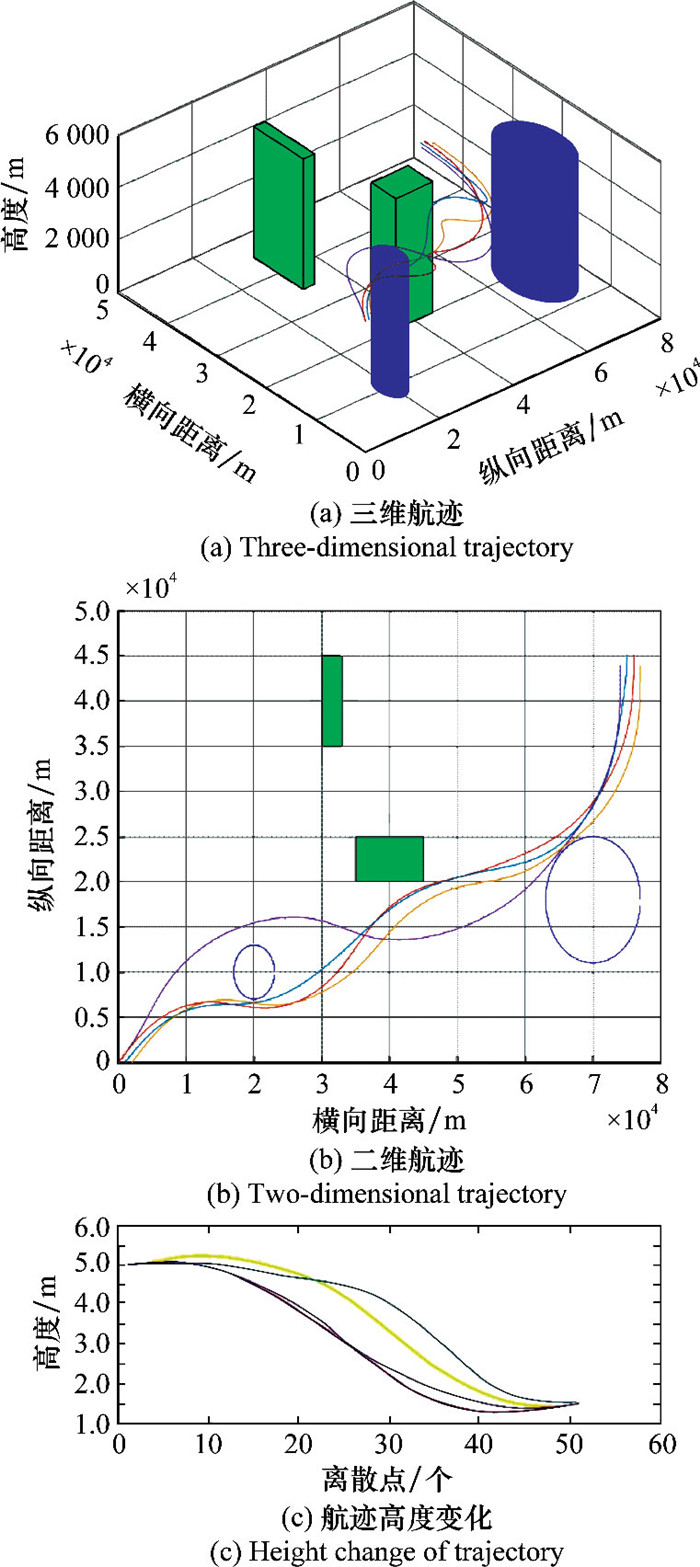
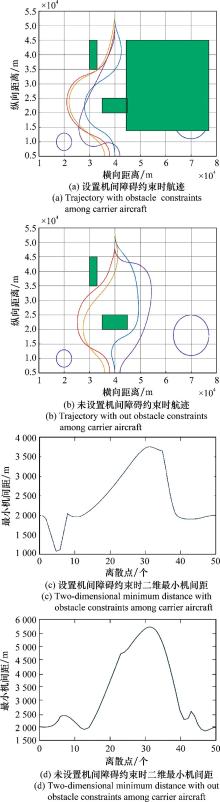
Fig.7
Trajectory comparison of task group 2"

Fig.8
Trajectory change of task group 1 for executing subtask"
| 21 | 李樾, 韩维, 陈清阳, 等. 凸优化算法在有人/无人机协同系统航迹规划中的应用[J]. 宇航学报, 2020, 41 (3): 276- 286. |
| LI Y , HAN W , CHEN Q Y , et al. Application of convex optimization algorithm in trajectory planning of manned/unmanned cooperative system[J]. Journal of Astronautics, 2020, 41 (3): 276- 286. | |
| 22 | LU P , LIU X F . Autonomous trajectory planning for rendezvous and proximity operations by conic optimization[J]. Journal of Gui-dance, Control, and Dynamics, 2013, 36 (2): 375- 389. |
| 23 | SZMUK M, ACKMESE B, BERNING A W, et al. Successive convexification for Fuel-optimal powered landing with aero dynamic drag and non-convex constraints[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2016. |
| 24 | LEWIS L R . Rapid motion planning and autonomous obstacle avoidance for unmanned vehicles[M]. Monterey: Naval Postgraduate School, 2006. |
| 25 | 邵将, 徐扬, 罗德林. 无人机多机协同对抗决策研究[J]. 信息与控制, 2018, 47 (3): 347- 354. |
| SHAO J , XU Y , LUO D L . Cooperative combat decision-making research for multi UAVs[J]. Information and Control, 2018, 47 (3): 347- 354. | |
| 26 | EUN Y , BANG H . Cooperative taskassignment/path planning of multiple unmanned aerial vehicles using genetic algorithm[J]. Journal of Aircraft, 2009, 46 (1): 338- 343. |
| 27 | 杨尚君, 孙永维, 庞宇. 基于改进鱼群算法的多无人机任务分配研究[J]. 计算机仿真, 2015, 32 (1): 69- 72. |
| YANG S J , SUN Y W , PANG Y . Research on multi-UAV cooperative task allocation based on improved fish swarm algorithm[J]. Computer Simulation, 2015, 32 (1): 69- 72. | |
| 28 | RASMUSSEN S J , SHIMA T . Tree search algorithm for assigning cooperating UAVs to multiple tasks[J]. International Journal of Robust and Nonlinear Control, 2008, 18 (2): 135- 153. |
| 1 | 闵昌万. 飞行器航迹规划与轨迹控制研究[D]. 西安: 西北工业大学, 1999. |
| MIN C W. Research of aircraft trajectory planning and trajectory control[D]. Xi'an: Northwestern Polytechnical University, 1998: 24-27. | |
| 2 |
黄鹤, 吴琨, 王会峰, 等. 基于改进飞蛾扑火算法的无人机低空突防路径规划[J]. 中国惯性技术学报, 2021, 29 (2): 256- 263.
doi: 10.13695/j.cnki.12-1222/o3.2021.02.017 |
|
HUANG H , WU K , WANG H F , et al. Path-planning of UAV low altitude penetration based on improved moth-flame optimization[J]. Journal of Chinese Inertial Technology, 2021, 29 (2): 256- 263.
doi: 10.13695/j.cnki.12-1222/o3.2021.02.017 |
|
| 3 | 张志伟, 蒋道刚, 袁坤. 低空突防航线规划研究[J]. 飞行力学, 2019, 37 (4): 62- 67. |
| ZHANG Z W , JIANG D G , YUAN K . Study on low altitude penetration route planning[J]. Flight Dynamics, 2019, 37 (4): 62- 67. | |
| 4 |
RADMANESH M , KUMAR M , GUENTERT P H , et al. Overview of path planning and obstacle avoidance algorithms for UAVs: a comparative study[J]. Unmanned Systems, 2018, 6 (2): 95- 118.
doi: 10.1142/S2301385018400022 |
| 5 | 丁明跃, 郑昌文, 周成平, 等. 无人飞行器航迹规划[M]. 北京: 电子工业出版社, 2009: 6- 15. |
| DING M Y , ZHENG C W , ZHOU C P , et al. Track planning of unmanned aerial vehicle[M]. Beijing: Publishing House of Electronics Industry, 2009: 6- 15. | |
| 6 | 韩尧, 李少华. 基于改进人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2021, 43 (11): 3305- 3311. |
| HAN Y , LI S H . UAV path planning based on improved artificial potential field[J]. Systems Engineering and Electronics, 2021, 43 (11): 3305- 3311. | |
| 7 | BAI W B, WU X D, XIE Y E, et al. A cooperative route planning method for multi-UAVs based-on the fusion of artificial potential field and B-spline interpolation[C]//Proc. of the 37th Chinese Control Conference, 2018: 6733-6738. |
| 8 | FU G D, PENG J, XIN Q B, et al. AUV local path planning based on virtual potential field[C]//Proc. of the IEEE International Conference Mechatronics and Automation, 2005, 4: 1711-1716. |
| 9 |
NIU H L , JI Z , SAVVARIS A , et al. Energy efficient path planning for unmanned surface vehicle in spatially-temporally variant environment[J]. Ocean Engineering, 2020, 196, 106766.
doi: 10.1016/j.oceaneng.2019.106766 |
| 10 | CHEN X, LI G Y, CHEN X M. Path planning and cooperative control for multiple UAVs based on consistency theory and Voronoi diagram[C]//Proc. of the 29th Chinese Control and Decision Conference, 2017: 881-886. |
| 11 | SHEN Z Y, CHENG X M, ZHOU S Y, et al. A dynamic airspace planning framework with ads-b tracks for manned and unmanned aircraft at low-altitude sharing airspace[C]//Proc. of the IEEE/AIAA 36th Digital Avionics Systems Conference, 2017. |
| 12 |
MASHAYEKHI R , IDRIS M , ANISI M , et al. Informed RRT*- connect: an asymptotically optimal single-query path planning method[J]. IEEE Access, 2020, 8, 19842- 19852.
doi: 10.1109/ACCESS.2020.2969316 |
| 13 |
WEN N F , ZHAO L L , SU X H , et al. UAV online path planning algorithm in a low altitude dangerous environment[J]. IEEE/CAA Journal of AutomaticaSinica, 2015, 2 (2): 173- 185.
doi: 10.1109/JAS.2015.7081657 |
| 14 |
LIN Y , SARIPALLI S . Sampling-based path planning for UAV collision avoidance[J]. IEEE Trans.on Intelligent Transportation Systems, 2017, 18 (11): 3179- 3192.
doi: 10.1109/TITS.2017.2673778 |
| 15 |
QIN S T , BADGWELL T A . A survey of industrial model predictive control technology[J]. Control Engineering Practice, 2003, 11 (7): 733- 764.
doi: 10.1016/S0967-0661(02)00186-7 |
| 16 | 王祝, 刘莉, 龙腾, 等. 基于罚函数序列凸规划的多无人机轨迹规划[J]. 航空学报, 2016, 37 (10): 3149- 3158. |
| WANG Z , LIU L , LONG T , et al. Trajectory planning for multi-UAVs using penalty sequential convex programming[J]. Aeronautica et AstronauticaSinica, 2016, 37 (10): 3149- 3158. | |
| 17 | 严冰, 张进, 罗亚中. 面向编队卫星的空间系绳在轨服务[J]. 系统工程与电子技术, 2021, 43 (3): 806- 813. |
| 29 | TANG J , ZHU K J , GUO H X , et al. Using auction-based task allocation scheme for simulation optimization of search and rescue in disaster relief[J]. Simulation Modelling Practice and Theory, 2018, 82, 132- 146. |
| 30 | 张进, 郭浩, 陈统. 基于可适应匈牙利算法的武器-目标分配问题[J]. 兵工学报, 2021, 42 (6): 1339- 1344. |
| ZHANG J , GUO H , CHEN T . Weapon-target assignment based on adaptable Hungarian algorithm[J]. Acta Armamentarii, 2021, 42 (6): 1339- 1344. | |
| 31 | 高阳阳, 余敏建, 杨杰. 多机空战指挥引导不平衡目标分配方法研究[J]. 航空工程进展, 2018, 9 (4): 523- 529. |
| GAO Y Y , YU M J , YANG J . Research on the method of unbalanced target allocation in multi-aircraft air combat command and guidance[J]. Advances in Aeronautical Science and Engineering, 2018, 9 (4): 523- 529. | |
| 32 | 朱宝鎏, 朱荣昌, 熊笑非. 作战飞机效能评估[M]. 北京: 航空工业出版社, 2006: 58- 69. |
| ZHU B L , ZHU R C , XIONG X F . Effectiveness assessment of combat aircraft[M]. Beijing: Aviation Industry Press, 2006: 58- 69. | |
| 17 | YANG B , ZHANG J , LUO Y Z . On-orbit service for formation satellites with space-tether[J]. Systems Engineering and Electronics, 2021, 43 (3): 806- 813. |
| 18 | KUWATA Y , HOW J . Cooperative distributed robust trajectory optimization using receding horizon MILP[J]. IEEE Trans.on System Technology, 2016, 19 (2): 423- 431. |
| 19 | 李牧东, 赵辉, 黄汉桥, 等. 基于TLD模型的UAV三维实时平滑航迹规划[J]. 系统工程与电子技术, 2017, 39 (1): 93- 100. |
| LI M D , ZHAO H , HUANG H Q , et al. 3-D real-time smooth path planning for UAV based on TLD model[J]. Systems Engineering and Electronics, 2017, 39 (1): 93- 100. | |
| 20 | BOYD S , VANDENBERGHE L . Convex Optimization[M]. New York: Cambridge University Press, 2004. |
| [1] | Duo ZHENG, Yu HAN, Tianyu LU, Zhichen CHU. Multi aircraft cooperative guidance technology considering collision avoidance constraint task allocation [J]. Systems Engineering and Electronics, 2023, 45(9): 2873-2883. |
| [2] | Zhengda CUI, Mingying WEI, Yunqian LI. Cooperative trajectory planning method in later part of midcourse based on velocity estimation [J]. Systems Engineering and Electronics, 2023, 45(9): 2912-2921. |
| [3] | Hanyu QIAN, Xiaoman TIAN, Bing XIAO, Lu CAO, Rui WANG, Xiwei WU. Balanced task allocation method for distributed satellite swarm game [J]. Systems Engineering and Electronics, 2023, 45(6): 1797-1804. |
| [4] | Yaoyao LI, Chaoran GUO, Yang LI, Yuzhuang ZHAO. Trajectory tracking control of autonomous vehicle based on steering and braking coordination [J]. Systems Engineering and Electronics, 2023, 45(4): 1185-1192. |
| [5] | Chengfei YUE, Zhenghua XUE, Weiran YAO, Xibin CAO. Cooperative combat task allocation of multiple aerial vehicles based on the characteristic relation [J]. Systems Engineering and Electronics, 2022, 44(6): 1897-1906. |
| [6] | Hanyang WANG, Liang CHEN, Hai XU, Jingbo BAI. UAV online trajectory planning based on MOEA/D-ARMS [J]. Systems Engineering and Electronics, 2022, 44(11): 3505-3514. |
| [7] | Jiajia HUANG, Jing LEI, Ying HUANG. Research on application of rateless code in wireless sensor network [J]. Systems Engineering and Electronics, 2022, 44(10): 3228-3234. |
| [8] | Shuang CONG, Kun ZHANG. Online quantum state estimation optimization algorithm based on Kalman filter [J]. Systems Engineering and Electronics, 2021, 43(6): 1636-1643. |
| [9] | Jing ZHOU, Xiaozhe ZHAO, Zhen XU, Zhong LIN, Xiaopan ZHANG. Many-objective task allocation method based on D-NSGA-Ⅲ algorithm for multi-UAVs [J]. Systems Engineering and Electronics, 2021, 43(5): 1240-1247. |
| [10] | Chenwei GU, Zhi LIN, Min LIN, Luyao XIE, Jian OUYANG, Shuo HUANG. Robust secure beamforming design for the downlink of satellite communications [J]. Systems Engineering and Electronics, 2021, 43(5): 1361-1370. |
| [11] | Han LI, Honghai ZHANG, Liandong ZHANG, Hao LIU. Multiple logistics unmanned aerial vehicle collaborative task allocation in urban areas [J]. Systems Engineering and Electronics, 2021, 43(12): 3594-3602. |
| [12] | Honghai ZHANG, Xiaopeng QIAN, Xinwei WU, Hao LIU, Yu TIAN, Lichao WANG. Cooperative trajectory planning for UAV formation based onpath-speed decoupling [J]. Systems Engineering and Electronics, 2020, 42(9): 1976-1987. |
| [13] | Zhengjie LI, Junwei XIE, Haowei ZHANG, Zhaojian ZHANG. Joint power and bandwidth allocation algorithm based on collocated MIMO radar [J]. Systems Engineering and Electronics, 2020, 42(5): 1041-1049. |
| [14] | WANG Jianhao, ZHANG Liang, SHI Chao, CHE Fei, ZHANG Pengtao. Task allocation modeling and solving algorithm for equipment support using DLS-BCIWBA [J]. Systems Engineering and Electronics, 2018, 40(9): 1979-1985. |
| [15] | . Synthesis algorithm of directional modulation signals based on sparse arrays [J]. Systems Engineering and Electronics, 2018, 40(12): 2816-2823. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||