Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (6): 1897-1906.doi: 10.12305/j.issn.1001-506X.2022.06.16
• Systems Engineering • Previous Articles Next Articles
Cooperative combat task allocation of multiple aerial vehicles based on the characteristic relation
Chengfei YUE1,*, Zhenghua XUE1,2, Weiran YAO3, Xibin CAO2
- 1. Institute of Space Science and Applied Technology, Harbin Institute of Technology Shenzhen, Shenzhen 518055, China
2. Research Center of Satellite Technology, Harbin Institute of Technology, Harbin 150001, China
3. School of Astronautics, Harbin Institute of Technology, Harbin 150001, China
-
Received:2021-06-19Online:2022-05-30Published:2022-05-30 -
Contact:Chengfei YUE
CLC Number:
Cite this article
Chengfei YUE, Zhenghua XUE, Weiran YAO, Xibin CAO. Cooperative combat task allocation of multiple aerial vehicles based on the characteristic relation[J]. Systems Engineering and Electronics, 2022, 44(6): 1897-1906.
share this article
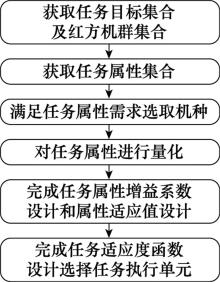
Fig.1
Task adaptability function design diagram"
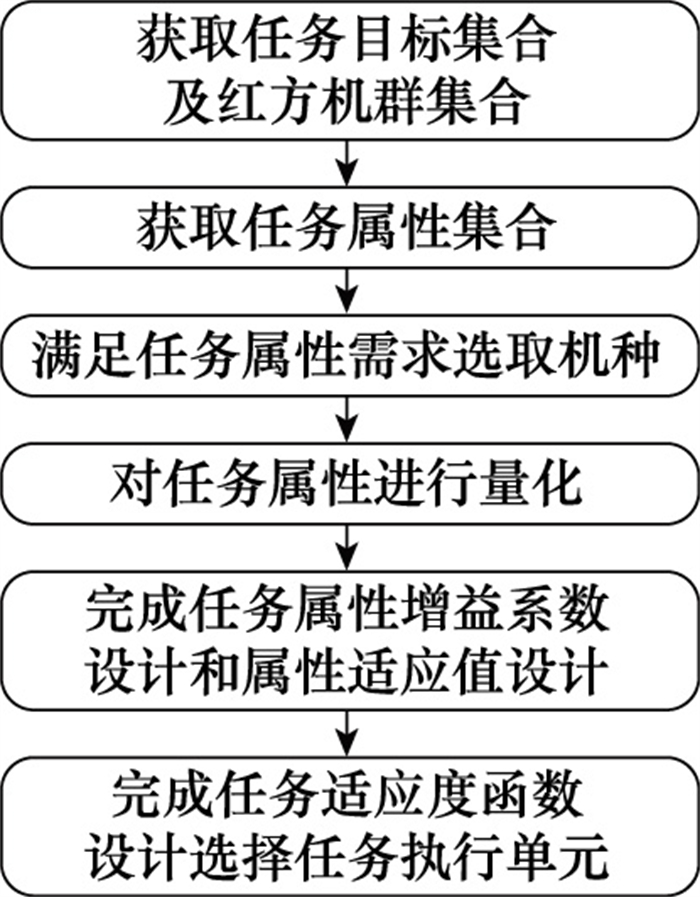

Fig.2
Vehicle types matching and selection process diagram"
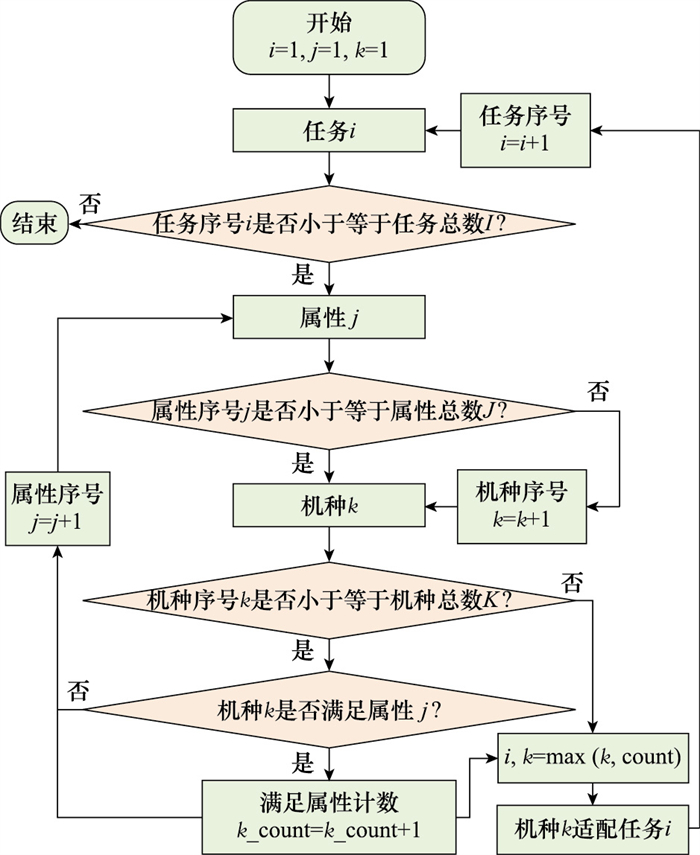
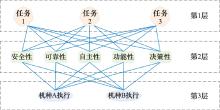
Fig.3
Hierarchical structure diagram of the matching model"
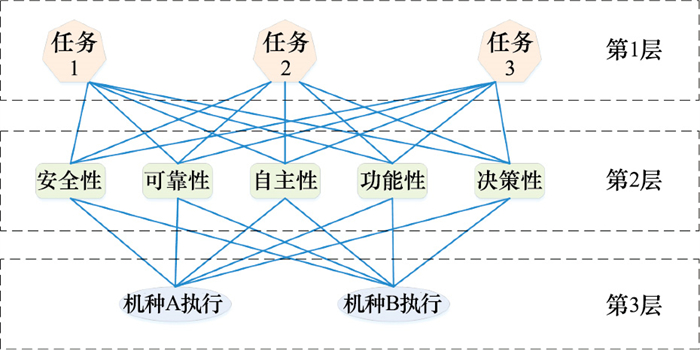
Table 1
Meaning of judgment scale"
| 标度 | 含义 |
| 1 | Ai与Aj同样重要 |
| 3 | Ai比Aj稍为重要 |
| 5 | Ai比Aj重要 |
| 7 | Ai比Aj重要很多 |
| 9 | Ai比Aj绝对重要 |
| 2, 4, 6, 8 | 上述两相邻判断的中值 |
Table 2
Average random consistency index"
| 指标 | n | |||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
| RI | 0 | 0 | 0.52 | 0.89 | 1.12 | 1.24 | 1.36 | 1.41 |
Fig.4
Function of attribute value for vehicle types"
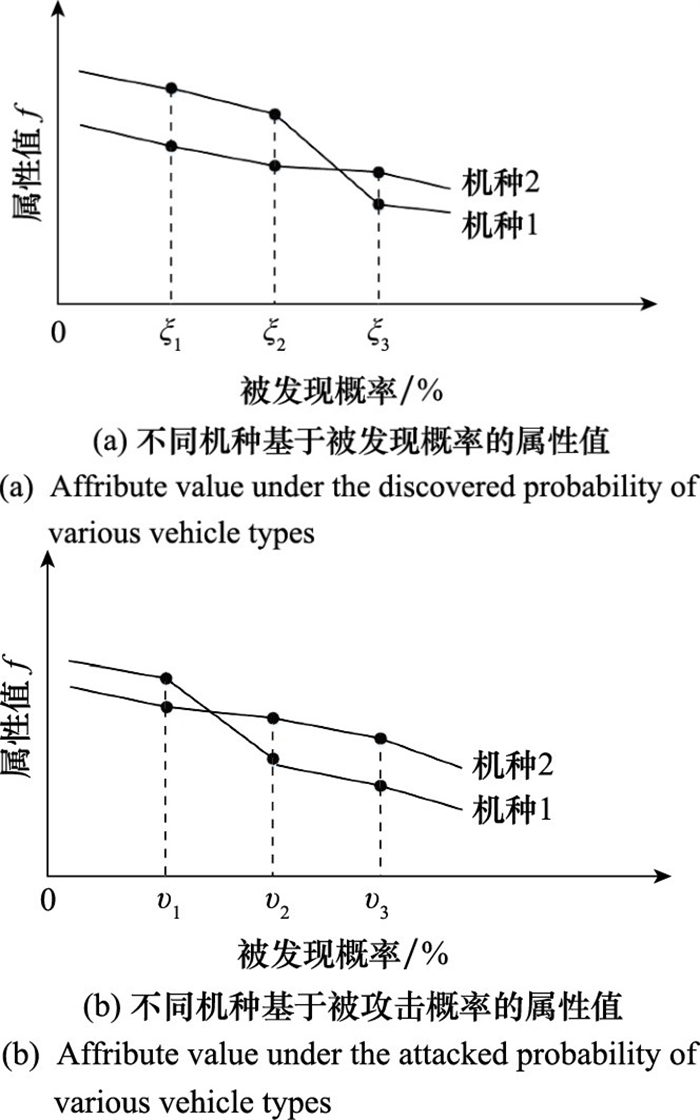
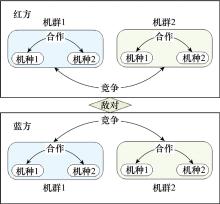
Fig.5
Relation of fleets"
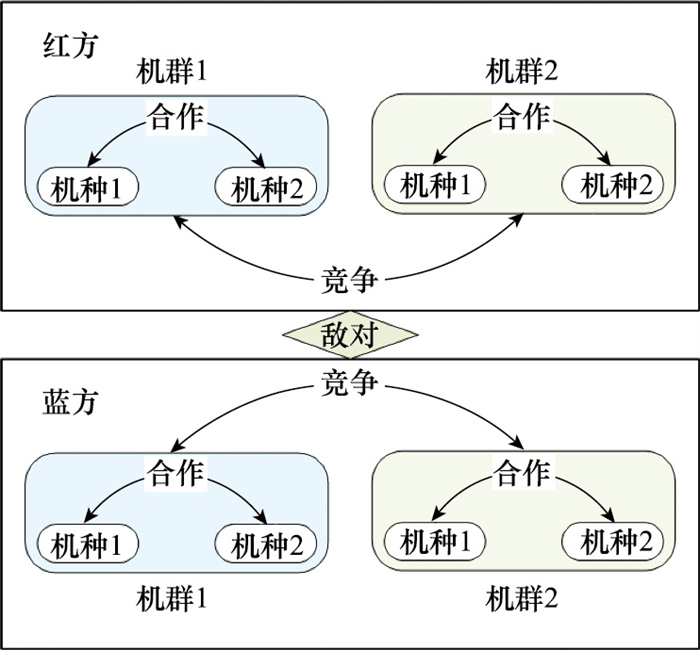
Table 3
Impairment penalty of aerial vehicle in two heterogeneous fleets"
| 机群A参数 | A_M1 | A_M2 | A_M3 | A_U4 | A_U5 | A_U6 |
| 折损惩罚值 | 15 | 15 | 15 | 1.5 | 1.5 | 1.5 |
| 机群B参数 | B_M1 | B _M2 | B _M3 | B _U4 | B _U5 | B _U6 |
| 折损惩罚值 | 15 | 15 | 15 | 1.5 | 1.5 | 1.5 |
Table 4
Design parameter of mission matching function for two vehicle types"
| 参数 | 任务1 | 任务2 | 任务3 | 任务4 |
| λ1 | 0.4 | 0.1 | 1.4 | 1.4 |
| λ2 | 1.1 | 2.4 | 0.4 | 0.2 |
| p1/% | ξ1=25 | ξ2=50 | ξ3=75 | ξ3=75 |
| p2/% | u3=75 | u3=75 | u2=50 | u1=25 |
| f1 | f11(M, p11)=0.7 | f12(M, p12)=0.6 | f13(M, p13)=0.3 | f14(M, p14)=0.3 |
| f11(U, p11)=0.9 | f12(U, p12)=0.8 | f13(U, p13)=0.1 | f14(U, p14)=0.1 | |
| f2 | f21(M, p21)=0.1 | f22(M, p22)=0.1 | f23(M, p23)=0.2 | f24(M, p24)=0.9 |
| f21(U, p21)=0.3 | f22(U, p22)=0.3 | f23(U, p23)=0.6 | f24(U, p24)=0.8 |
Table 5
Mission fitness value of two vehicle types"
| 机种 | 任务1 | 任务2 | 任务3 | 任务4 |
| 机种1 | F(M)=0.4 | F(M)=0.3 | F(M)=0.5 | F(M)=0.6 |
| 机种2 | F(U)=0.7 | F(U)=0.8 | F(U)=0.4 | F(U)=0.3 |
Table 6
Characteristic relation matrix of fleets"
| 关系 | A1 | A2 | A3 | A4 | A5 | A6 | B1 | B2 | B3 | B4 | B5 | B6 |
| A1 | 0 | 0 | 1 | 0 | 1 | 0 | -1 | -1 | 0 | 0 | 0 | 0 |
| A2 | 0 | 0 | 0 | 1 | 1 | 1 | -1 | 0 | -1 | 0 | -1 | -1 |
| A3 | 0 | 0 | 0 | 1 | 1 | 1 | -1 | -1 | -1 | 0 | 0 | 0 |
| A4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | -1 | -1 | 0 | -1 | 0 |
| A5 | 0 | 0 | 0 | 0 | 0 | 1 | -1 | 0 | -1 | 0 | -1 | 0 |
| A6 | 0 | 0 | 0 | 0 | 0 | 0 | -1 | 0 | 0 | 0 | 0 | -1 |
| B1 | -1 | -1 | -1 | 0 | -1 | -1 | 0 | 0 | 1 | 0 | 1 | 0 |
| B2 | -1 | 0 | -1 | -1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| B3 | 0 | -1 | -1 | -1 | -1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| B4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 |
| B5 | 0 | -1 | 0 | -1 | -1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| B6 | 0 | -1 | 0 | 0 | 0 | -1 | 0 | 0 | 0 | 0 | 0 | 0 |
Table 7
Assignment result for each task and the number of relationships in different relationship states"
| 关系 考虑 | 任务1 | 任务2 | 任务3 | 任务4 | 分配结果 关系数目 |
| 不考虑 竞合 | A_U4 A_U5 B_U4 | A_U6 B_U5 B_U6 | A_M1 B_M2 B_M3 | A_M2 A_M3 B_M1 | 合作: 0 竞争: 0 |
| 只考虑 合作 | A_U4 B_U4 B_U6 | A_U5 A_U6 B_U5 | A_M1 A_M2 A_M3 | B_M1 B_M2 B_M3 | 合作: 4 竞争: 0 |
| 只考虑 竞争 | A_U4 A_U5 A_U6 | B_U4 B_U5 B_U6 | A_M1 A_M3 B_M1 | A_M2 B_M2 B_M3 | 合作: 0 竞争: 3 |
| 考虑 竞争 合作 | A_U4 A_U6 A_M2 | A_U5 B_U4 B_U6 | B_U5 A_M1 A_M3 | B_M1 B_M2 B_M3 | 合作: 5 竞争: 0 |

Fig.6
Assignment result of two heterogeneous fleets"
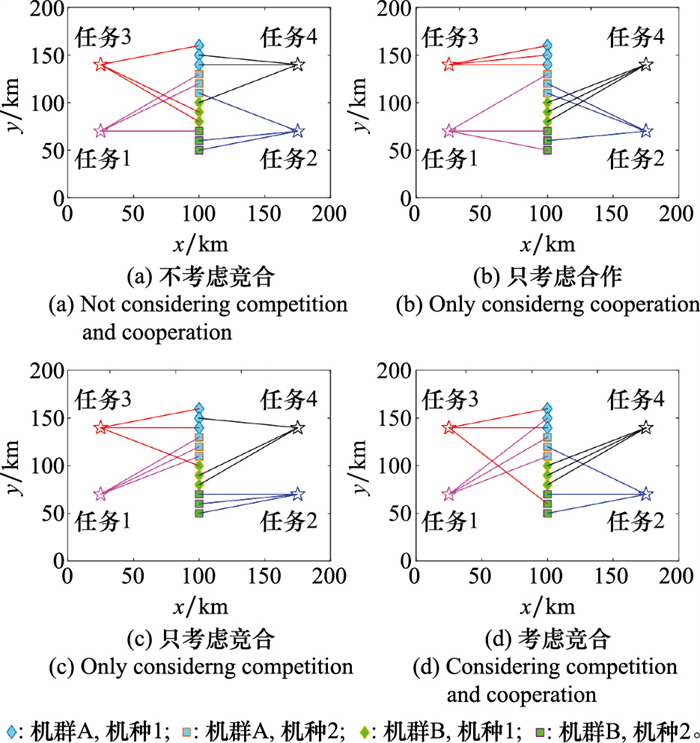

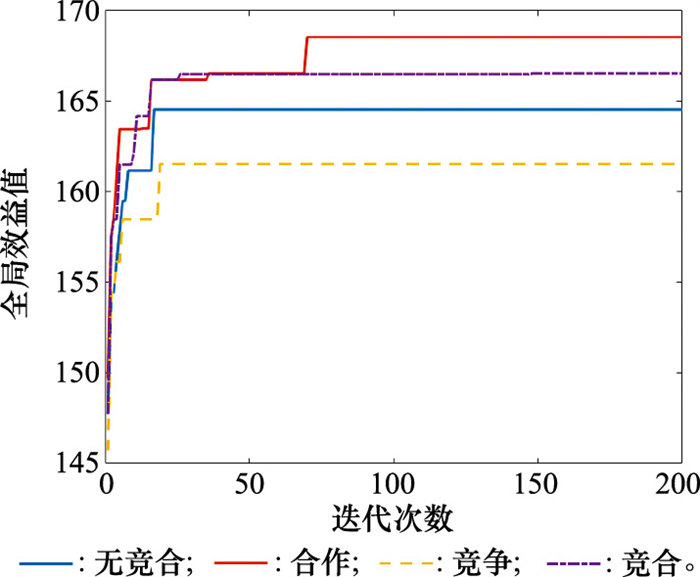
Fig.7
Evolution curve of total revenue for heterogeneous fleets"
| 1 |
SHU Z , WANG W P , WANG R .Design of an optimized architecture for manned and unmanned combat system-of-systems: formulation and coevolutionary optimization[J].IEEE Access,2018,6,52725-52740.
doi: 10.1109/ACCESS.2018.2870969 |
| 2 | 李文, 陈建.有人机/无人机混合编队协同作战研究综述与展望[J].航天控制,2017,35(3):90-96. |
| LI W , CHEN J .Review and prospect of cooperative combat of manned/unmanned aerial vehicle hybrid formation[J].Aerospace Control,2017,35(3):90-96. | |
| 3 | 贾高伟, 王建峰.无人机集群任务规划方法研究综述[J].系统工程与电子技术,2020,43(1):99-111. |
| JIA G W , WANG J F .Research review of UAV swarm mission planning method[J].Systems Engineering and Electronics,2020,43(1):99-111. | |
| 4 |
YAO W R , QI N M , WAN N , et al.An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles[J].Aerospace Science and Technology,2019,86,455-464.
doi: 10.1016/j.ast.2019.01.061 |
| 5 | 唐嘉钰, 李相民, 代进进, 等.复杂约束条件下异构多智能体联盟任务分配[J].控制理论与应用,2020,37(11):144-153. |
| TANG J Y , LI X M , DAI J J , et al.Coalition task allocation of heterogeneous multiple agents with complex constraints[J].Control Theory & Applications,2020,37(11):144-153. | |
| 6 |
MIAO Y F , ZHONG L , YIN Y F , et al.Research on dynamic task allocation for multiple unmanned aerial vehicles[J].Transactions of the Institute of Measurement and Control,2017,39(4):466-474.
doi: 10.1177/0142331217693077 |
| 7 | 李夏苗, 廖文昆, 伍国华, 等.基于两阶段迭代优化的空天观测资源协同任务规划方法[J].控制与决策,2021,36(5):1147-1156. |
| LI X M , LIAO W K , WU G H , et al.A two-stage iterative optimazation method for the coordinated task planning of space and air observation resources[J].Control and Decision,2021,36(5):1147-1156. | |
| 8 |
FU Z J , MAO Y H , HE D J , et al.Secure multi-UAV collaborative task allocation[J].IEEE Access,2019,7,35579-35587.
doi: 10.1109/ACCESS.2019.2902221 |
| 9 |
KURDI H A , ALOBOUD E , ALALWAN M , et al.Autonomous task allocation for multi-UAV systems based on the locust elastic behavior[J].Applied Soft Computing,2018,71,110-126.
doi: 10.1016/j.asoc.2018.06.006 |
| 10 | 周晶, 赵晓哲, 许震, 等.基于D-NSGA-Ⅲ算法的无人机群高维多目标任务分配方法[J].系统工程与电子技术,2021,43(5):1240-1247. |
| ZHOU J , ZHAO X J , XU Z , et al.Task allocation method based on D-NSGA-Ⅲ algorithm for multi-UAVs[J].Systems Engineering and Electronics,2021,43(5):1240-1247. | |
| 11 |
ZHAO X Y , ZONG Q , TIAN B L , et al.Fast task allocation for heterogeneous unmanned aerial vehicles through reinforcement learning[J].Aerospace Science and Technology,2019,92,588-594.
doi: 10.1016/j.ast.2019.06.024 |
| 12 | ZHONG Y, YAO P Y, SUN Y, et al. Research on command and control of MAV/UAV engagement from the cooperative perspective[C]//Proc. of the IEEE International Conference on Information System and Artificial Intelligence, 2016: 38-44. |
| 13 |
ZHONG Y , YAO P Y , ZHANG J Y , et al.Formation and adjustment of manned/unmanned combat aerial vehicle cooperative engagement system[J].Journal of Systems Engineering and Electronics,2018,29(4):756-767.
doi: 10.21629/JSEE.2018.04.10 |
| 14 |
ZHONG Y , YAO P Y , WAN L J , et al.Intervention decision-making in MAV/UAV cooperative engagement based on human factors engineering[J].Journal of Systems Engineering and Electronics,2018,29(3):530-538.
doi: 10.21629/JSEE.2018.03.10 |
| 15 | 韩博文, 姚佩阳.基于Holon组织的有人/无人机作战联盟形成[J].系统工程与电子技术,2018,40(1):91-97. |
| HAN B W , YAO P Y .Coalition formation of manned/unmanned aerial vehicle cluster based on Holon organization[J].Systems Engineering and Electronics,2018,40(1):91-97. | |
| 16 |
JIAO Z Q , YAO P Y , ZHANG J Y , et al.MAV/UAV task coalition phased-formation method[J].Journal of Systems Engineering and Electronics,2019,30(2):402-414.
doi: 10.21629/JSEE.2019.02.18 |
| 17 | 姜禹呈, 郭基联.有人机/无人机协同效果评估模型设计[J].军事运筹与系统工程,2016,30(3):28-31. |
| JIANG Y C , GUO J L .Evaluation model design of manned/unmanned aerial vehicle for synergy effect[J].Military Operations Research and Systems Engineering,2016,30(3):28-31. | |
| 18 | FAN J R, LI D G, LI R P. Research on mission planning for MAV/UAV cooperative combat[C]//Proc. of the IEEE International Conference on Unmanned Systems, 2019: 548-553. |
| 19 | 史国庆, 武凡, 张林, 等.基于组合赋权法的有人/无人机协同作战能力分析[J].火力与指挥控制,2019,44(4):87-91. |
| SHI G Q , WU F , ZHANG L , et al.Analysis of MAV/UAV cooperative engagement capability based on combination weight method[J].Fire Control & Command Control,2019,44(4):87-91. | |
| 20 | 邓雪, 李家铭, 曾浩健, 等.层次分析法权重计算方法分析及其应用研究[J].数学的实践与认识,2012,42(7):93-100. |
| DENG X , LI J M , ZENG H J , et al.Research on computation methods of AHP wight vector and its applications[J].Journal of Mathematics in Practice and Theory,2012,42(7):93-100. | |
| 21 | 董彦非, 张旺, 崔巍.有人机/无人机协同空地攻击效能评估的综合指数模型[J].火力与指挥控制,2015,40(2):58-62. |
| DONG Y F , ZHANG W , CUI W .Synthesized index model for cooperation of manned/unmanned fighters in air-to-ground attacking effectiveness assessment[J].Fire Control & Command Control,2015,40(2):58-62. | |
| 22 | 李炜, 张伟.基于粒子群算法的多无人机任务分配方法[J].控制与决策,2010,25(9):1359-1363. |
| LI W , ZHANG W .Method of tasks allocation of multi-UAV based on particles swarm optimization[J].Control and Decision,2010,25(9):1359-1363. | |
| 23 | XIAO J M , LI J J , WANG X H .A modified particle swarm optimization for traveling salesman problems[J].Computer Engineering and Applications,2004,40(35):50-52. |
| [1] | Jing ZHOU, Xiaozhe ZHAO, Zhen XU, Zhong LIN, Xiaopan ZHANG. Many-objective task allocation method based on D-NSGA-Ⅲ algorithm for multi-UAVs [J]. Systems Engineering and Electronics, 2021, 43(5): 1240-1247. |
| [2] | Han LI, Honghai ZHANG, Liandong ZHANG, Hao LIU. Multiple logistics unmanned aerial vehicle collaborative task allocation in urban areas [J]. Systems Engineering and Electronics, 2021, 43(12): 3594-3602. |
| [3] | Jiayi LIU, Shaohua YUE, Gang WANG, Jie ZHANG, Xiaoqiang YAO. Design of command control model based on MPC-MAS under multi-platform distributed cooperative operation [J]. Systems Engineering and Electronics, 2020, 42(7): 1582-1589. |
| [4] | WANG Jianhao, ZHANG Liang, SHI Chao, CHE Fei, ZHANG Pengtao. Task allocation modeling and solving algorithm for equipment support using DLS-BCIWBA [J]. Systems Engineering and Electronics, 2018, 40(9): 1979-1985. |
| [5] | CUI Ya-ni, REN Jia, DU Wen-cai. Time-sensitive task dynamic allocation algorithm for multi-UAVs in battlefield environments [J]. Systems Engineering and Electronics, 2016, 38(4): 828-835. |
| [6] | YAO Peiyang1, WAN Lujun1,2, SUN Peng1, ZHOU Xiangxiang3. Dynamic task allocation in multiple agent groups based on RHPIVFSA [J]. Systems Engineering and Electronics, 2014, 36(7): 1309-1319. |
| [7] | WAN Lu-jun, YAO Pei-yang, SUN Peng. Distributed task allocation method of manned/unmanned combat Agents [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 310-316. |
| [8] | LIANG Xiao-long,HU Jun-hua,JING Xian-yong,LIU An,FENG Jin-fu. Multi-stage optimization model and algorithm for near space multi-weapon platform attacking ground targets [J]. Journal of Systems Engineering and Electronics, 2010, 32(12): 2618-2622. |
| [9] | TANG Suyan,ZHU Yifan,LI Qun,LEI Yonglin. Survey of task allocation in multi Agent systems [J]. Journal of Systems Engineering and Electronics, 2010, 32(10): 2155-2161. |
| [10] | LI Wei-xiang, ZHANG Guang-ming, LI Bang-yi. Research on multi-attributes task allocation mechanism in MAS [J]. Journal of Systems Engineering and Electronics, 2009, 31(5): 1113-1116. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||