Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (12): 3594-3602.doi: 10.12305/j.issn.1001-506X.2021.12.22
• Systems Engineering • Previous Articles Next Articles
Multiple logistics unmanned aerial vehicle collaborative task allocation in urban areas
Han LI, Honghai ZHANG*, Liandong ZHANG, Hao LIU
- School of Civil Aviation, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
-
Received:2021-02-04Online:2021-11-24Published:2021-11-30 -
Contact:Honghai ZHANG
CLC Number:
Cite this article
Han LI, Honghai ZHANG, Liandong ZHANG, Hao LIU. Multiple logistics unmanned aerial vehicle collaborative task allocation in urban areas[J]. Systems Engineering and Electronics, 2021, 43(12): 3594-3602.
share this article

Fig.1
Schematic diagram of multi-target and multiple logisticsUAVs distribution in urban areas"
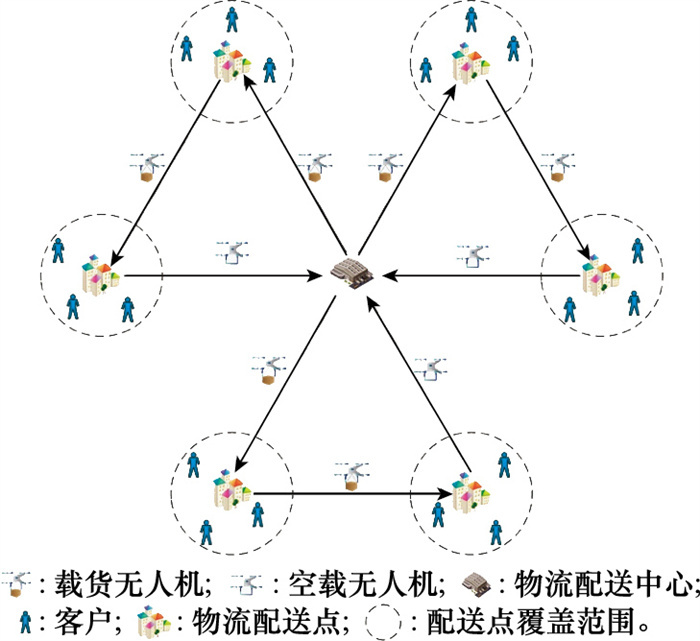

Fig.2
Schematic diagram of series and parallel lines of logistics UAVs' distribution system"
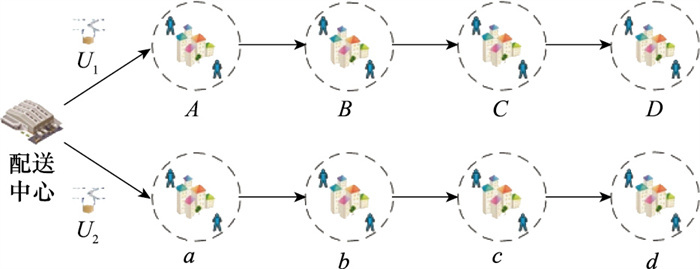
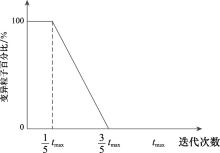
Fig.3
Relationship between the action range of Gauss mutation particles and iteration number"
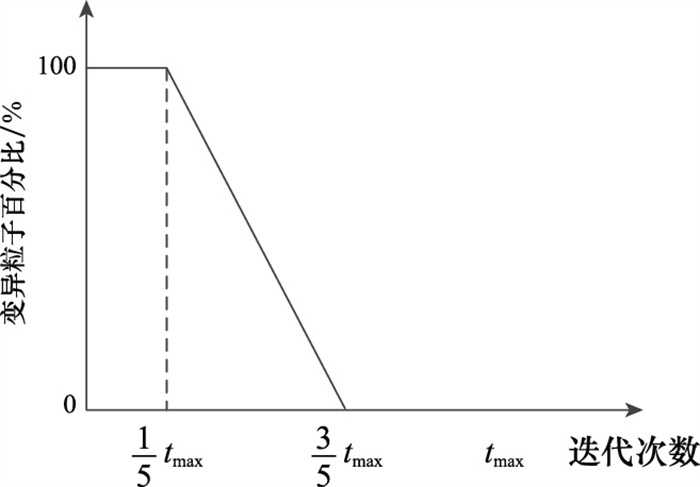
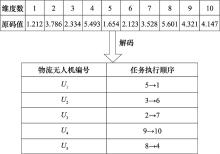
Fig.4
Schematic diagram of mapping relationship between task allocation scheme and particles"
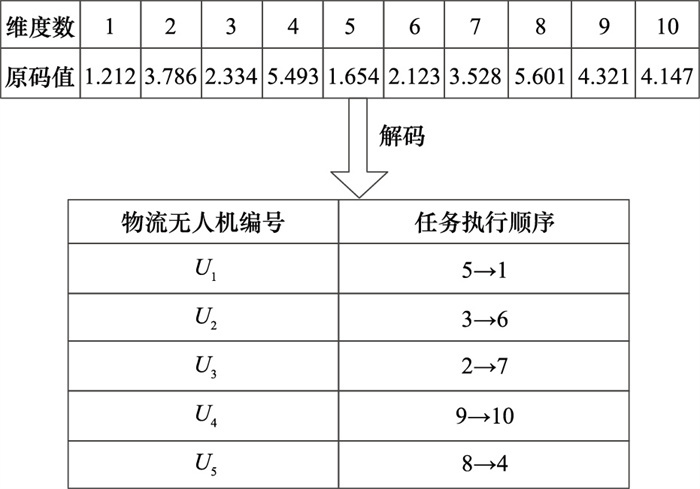
Table 1
UAVs' parameters"
| 无人机编号 | cfi/(元/分钟) | ηi/(元/千米) | vi/(m·s-1) | Li(max)/m | qi(max)/ kg |
| U1 | 0.30 | 0.25 | 10 | 6 000 | 4.5 |
| U2 | 0.30 | 0.30 | 12 | 4 500 | 5.0 |
| U3 | 0.30 | 0.20 | 12 | 4 000 | 3.5 |
| U4 | 0.30 | 0.22 | 15 | 4 200 | 5.0 |
| U5 | 0.30 | 0.26 | 14 | 4 500 | 4.0 |
| U6 | 0.30 | 0.24 | 13 | 4 700 | 6.0 |
| U7 | 0.30 | 0.20 | 11 | 5 000 | 4.5 |
| U8 | 0.30 | 0.27 | 15 | 4 300 | 5.5 |
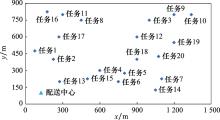
Fig.5
Logistics distribution task point layout"
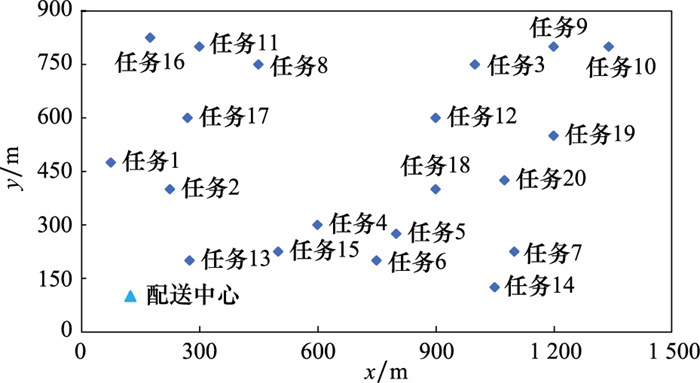
Table 2
Parameters of logistics transportation task point"
| 任务编号 | 时间窗/s | 坐标点/m | 卸货时间/s | 需货量/kg |
| T1 | [0, 100] | [75,475,50] | 30 | 0.5 |
| T2 | [0, 180] | [225,400,50] | 60 | 1.0 |
| T3 | [0, 200] | [1 000, 750, 60] | 60 | 1.0 |
| T4 | [0, 190] | [600,300,25] | 96 | 1.6 |
| T5 | [0, 300] | [800,275,25] | 60 | 1.0 |
| T6 | [0, 350] | [750,200,50] | 90 | 1.5 |
| T7 | [0, 220] | [1 100, 225, 50] | 72 | 1.2 |
| T8 | [0, 450] | [450, 750, 60] | 108 | 1.8 |
| T9 | [0, 400] | [1 200, 800, 25] | 36 | 0.6 |
| T10 | [0, 500] | [1 340, 800, 50] | 90 | 1.5 |
| T11 | [0, 370] | [300, 800, 50] | 108 | 1.8 |
| T12 | [0, 550] | [900, 600, 50] | 96 | 1.6 |
| T13 | [0, 420] | [275, 200, 30] | 84 | 1.4 |
| T14 | [0, 520] | [1 050, 125, 20] | 72 | 1.2 |
| T15 | [0, 600] | [500, 225, 40] | 90 | 1.5 |
| T16 | [0, 530] | [175,825,60] | 102 | 1.7 |
| T17 | [0.560] | [270,600,60] | 54 | 0.9 |
| T18 | [0, 230] | [900,400,10] | 48 | 0.8 |
| T19 | [0, 460] | [1 200, 550, 40] | 72 | 1.2 |
| T20 | [0, 570] | [1 075, 425, 30] | 66 | 1.1 |
Table 3
Other parameters"
| 参数 | 数值 | 参数 | 数值 | |
| 时间损失系数λ | 10 | 经济成本α1 | 0.3 | |
| 延迟惩罚α2 | 0.3 | 安全风险α3 | 0.4 | |
| 配送中心坐标 | [125, 100, 25] | 出发时间t0 | 0 | |
| 种群规模Q | 50 | 迭代次数tmax | 200 | |
| 惯性权重上界βmax | 1.0 | 惯性权重下界βmin | 0.5 | |
| Logistic参数μ | 4 | 高斯分布预设参数ε | 1.0 |
Table 4
Comparison of experimental results of three algorithms"
| 算法名称 | 目标函数值 | 经济成本 | 延迟惩罚 | 安全风险 |
| QPSO | 0.145 5 | 0.222 5 | 0.104 0 | 0.118 9 |
| IQPSO | 0.136 9 | 0.220 9 | 0.082 5 | 0.114 8 |
| 遗传算法 | 0.146 1 | 0.199 6 | 0.020 1 | 0.200 4 |
Table 5
Optimal task allocation plan"
| 编号 | 配送顺序 | 航程/m | 飞行时长/s | 载货量/kg |
| U1 | 0-T3-T19-T18-T17-0 | 2 896 | 524 | 3.9 |
| U2 | 0-T13-T15-T4-0 | 1 048 | 357 | 4.5 |
| U3 | 0-T2-T1-T16-0 | 1 577 | 323 | 3.2 |
| U4 | 0-T12-T10-T9-T14-0 | 3 165 | 505 | 4.9 |
| U5 | 0-T5-T6-0 | 1 424 | 252 | 2.5 |
| U6 | 0-T11-T8-0 | 1 608 | 340 | 3.6 |
| U8 | 0-T7-T20-0 | 2 190 | 284 | 2.3 |
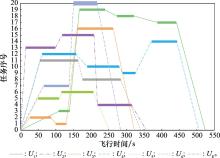
Fig.6
Flight time sequential of logistics UAVs"
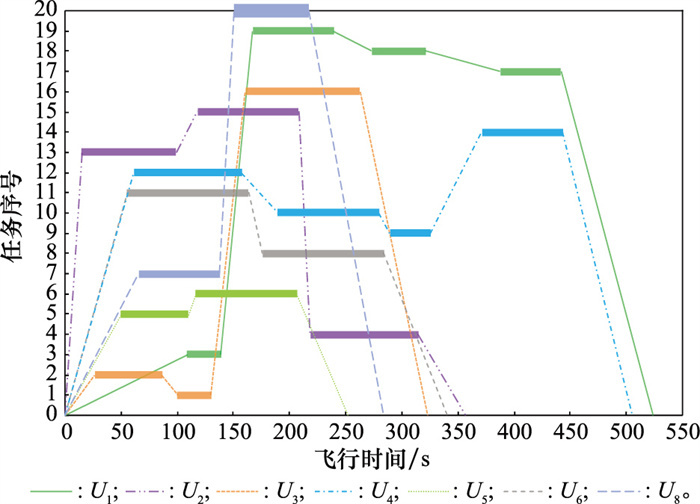
Table 6
Influence of different objective function weights on task allocation results"
| 序号 | α1权重 | α2权重 | α3权重 | 经济成本 | 延迟惩罚 | 安全风险 | 算法时长/s |
| 1 | 0.000 | 0.500 | 0.500 | 0.276 1 | 0.053 5 | 0.122 9 | 12.81 |
| 2 | 0.025 | 0.475 | 0.500 | 0.285 1 | 0.054 1 | 0.124 4 | 13.67 |
| 3 | 0.050 | 0.450 | 0.500 | 0.281 3 | 0.051 2 | 0.122 3 | 13.86 |
| 4 | 0.075 | 0.425 | 0.500 | 0.260 5 | 0.063 0 | 0.113 8 | 13.83 |
| 5 | 0.100 | 0.400 | 0.500 | 0.267 3 | 0.057 0 | 0.117 3 | 13.78 |
| 6 | 0.125 | 0.375 | 0.500 | 0.260 1 | 0.069 8 | 0.111 6 | 13.62 |
| 7 | 0.150 | 0.350 | 0.500 | 0.242 0 | 0.098 1 | 0.114 7 | 13.22 |
| 8 | 0.175 | 0.325 | 0.500 | 0.252 2 | 0.076 7 | 0.103 1 | 13.90 |
| 9 | 0.200 | 0.300 | 0.500 | 0.239 8 | 0.093 1 | 0.110 5 | 13.76 |
| 10 | 0.225 | 0.275 | 0.500 | 0.232 7 | 0.087 4 | 0.106 2 | 13.79 |
| 11 | 0.250 | 0.250 | 0.500 | 0.250 2 | 0.103 4 | 0.110 5 | 13.89 |
| 12 | 0.275 | 0.225 | 0.500 | 0.234 1 | 0.114 5 | 0.110 9 | 13.72 |
| 13 | 0.300 | 0.200 | 0.500 | 0.222 4 | 0.124 6 | 0.102 8 | 14.00 |
| 14 | 0.325 | 0.175 | 0.500 | 0.221 3 | 0.114 3 | 0.101 4 | 13.87 |
| 15 | 0.350 | 0.150 | 0.500 | 0.220 0 | 0.149 2 | 0.089 7 | 13.64 |
| 16 | 0.375 | 0.125 | 0.500 | 0.213 2 | 0.150 8 | 0.099 7 | 13.85 |
| 17 | 0.400 | 0.100 | 0.500 | 0.203 9 | 0.159 7 | 0.096 1 | 13.95 |
| 18 | 0.425 | 0.075 | 0.500 | 0.201 6 | 0.170 3 | 0.089 0 | 13.81 |
| 19 | 0.450 | 0.050 | 0.500 | 0.204 3 | 0.180 9 | 0.103 9 | 13.65 |
| 20 | 0.475 | 0.025 | 0.500 | 0.201 5 | 0.224 4 | 0.102 0 | 13.98 |
| 21 | 0.500 | 0.000 | 0.500 | 0.195 3 | 0.156 8 | 0.087 4 | 13.53 |
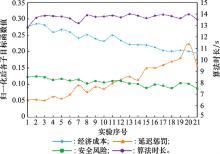
Fig.7
Influence of objective function weight value"
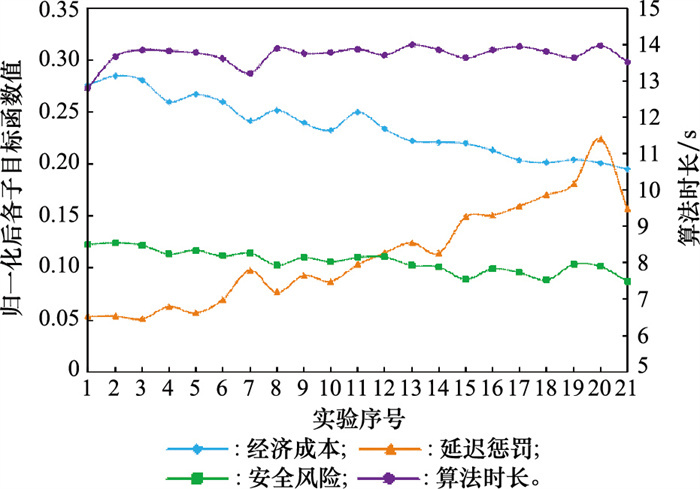
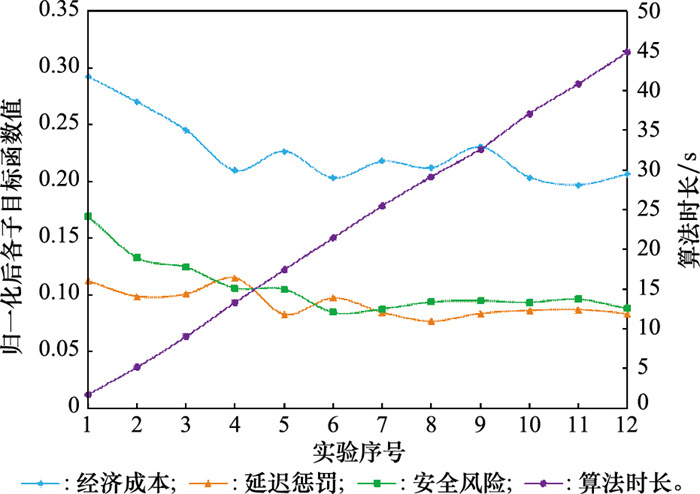
Table 7
Influence of different population sizes on task allocation results"
| 实验序号 | 种群规模Q | 经济成本 | 延迟惩罚 | 安全风险 | 算法时长/s |
| 1 | 25 | 0.292 7 | 0.112 1 | 0.168 9 | 1.74 |
| 2 | 50 | 0.270 1 | 0.098 4 | 0.132 6 | 5.18 |
| 3 | 75 | 0.245 2 | 0.100 3 | 0.124 2 | 9.01 |
| 4 | 100 | 0.209 5 | 0.114 7 | 0.105 9 | 13.34 |
| 5 | 125 | 0.226 5 | 0.082 6 | 0.105 1 | 17.43 |
| 6 | 150 | 0.202 8 | 0.097 0 | 0.084 6 | 21.45 |
| 7 | 175 | 0.217 6 | 0.084 2 | 0.087 7 | 25.47 |
| 8 | 200 | 0.211 9 | 0.076 5 | 0.093 8 | 29.13 |
| 9 | 225 | 0.230 4 | 0.083 3 | 0.094 9 | 32.59 |
| 10 | 250 | 0.203 5 | 0.086 1 | 0.093 5 | 37.08 |
| 11 | 275 | 0.196 7 | 0.086 9 | 0.096 2 | 40.81 |
| 12 | 300 | 0.206 2 | 0.083 2 | 0.087 9 | 44.79 |
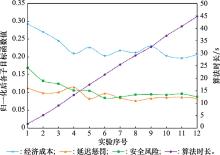
Fig.8
Influence of algorithm population size on weight value"
| 1 |
SHE R F , OUYANG Y F . Efficiency of UAV-based last-mile delivery under congestion in low-altitude air[J]. Transportation Research Part C: Emerging Technologies, 2021, 122, 102878.
doi: 10.1016/j.trc.2020.102878 |
| 2 |
KURU K , ANSELL D , KHAN W , et al. Analysis and optimization of unmanned aerial vehicle swarms in logistics: an intelligent delivery platform[J]. IEEE Access, 2019, 7, 15804- 15831.
doi: 10.1109/ACCESS.2019.2892716 |
| 3 | KIM M H , BAIK H , LEE S . Response threshold model based UAV search planning and task allocation[J]. Journal of Intelligent & Robotic Systems, 2014, 75 (3, 4): 625- 640. |
| 4 |
ZHANG L , ZHU Y A , SHI X C . A hierarchical decision-making method with a fuzzy ant colony algorithm for mission planning of multiple UAVS[J]. Information, 2020, 11 (4): 226.
doi: 10.3390/info11040226 |
| 5 | HUANG T Y, WANG Y, CAO X W, et al. Multi-UAV mission planning method[C]//Proc. of the 3rd International Conference on Unmanned Systems, 2020: 325-330. |
| 6 |
LIU X F , PENG Z R , CHANG Y T , et al. Multi-objective evolutionary approach for UAV cruise route planning to collect traffic information[J]. Journal of Central South University, 2012, 19 (12): 3614- 3621.
doi: 10.1007/s11771-012-1449-8 |
| 7 |
赵雪森, 王社伟, 邵校. 基于改进量子粒子群优化算法的多UCAV协同任务分配研究[J]. 兵器装备工程学报, 2015, 36 (10): 120- 124.
doi: 10.11809/scbgxb2015.10.030 |
|
ZHAO X S , WANG S W , SHAO X . Cooperative task allocation for multiple UCAV based on improved quantum-behaved particle swarm optimization algorithm[J]. Journal of Ordnance Equipment Engineering, 2015, 36 (10): 120- 124.
doi: 10.11809/scbgxb2015.10.030 |
|
| 8 | ZHANG Y Z, HU B, LI J W, et al. Heterogeneous multi-UAVs cooperative task assignment based on GSA-GA[C]//Proc. of the IEEE/CSAA International Conference on Aircraft Utility Systems, 2016: 423-426. |
| 9 |
FU Z J , MAO Y H , HE D J , et al. Secure multi-UAV collaborative task allocation[J]. IEEE Access, 2019, 7, 35579- 35587.
doi: 10.1109/ACCESS.2019.2902221 |
| 10 | 蒋硕, 袁小平. 改进PSO算法在多无人机协同任务分配中的应用[J]. 计算机应用研究, 2019, 36 (11): 3344- 3347, 3360. |
| JIANG S , YUAN X P . Application of improved PSO algorithm in multi UAV cooperative task allocation[J]. Application Research of Computers, 2019, 36 (11): 3344- 3347, 3360. | |
| 11 | 林君灿, 贾高伟, 侯中喜. 异构UAV编队反雷达作战中任务分配方法[J]. 系统工程与电子技术, 2018, 40 (9): 1986- 1992. |
| LIN J C , JIA G W , HOU Z X . Research on task assignment of heterogeneous UAV formation in the anti-radar combat[J]. Systems Engineering and Electronics, 2018, 40 (9): 1986- 1992. | |
| 12 | ZHU S R, ZHANG Y Z, GAO Y, et al. A cooperative task assignment method of multi-UAV based on self organizing map[C]// Proc. of the International Conference on Cyber-Enabled Distri-buted Computing and Knowledge Discovery, 2018: 437-442. |
| 13 |
YAO W R , QI N M , WAN N , et al. An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles[J]. Aerospace Science and Technology, 2019, 86, 455- 464.
doi: 10.1016/j.ast.2019.01.061 |
| 14 | SONG B D , PARK K , KIM J . Persistent UAV delivery logistics: MILP formulation and efficient heuristic[J]. Computers & Industrial Engineering, 2018, 120, 418- 428. |
| 15 | JIANG X W, ZHOU Q, YE Y. Method of task assignment for UAV based on particle swarm optimization in logistics[C]//Proc. of the International Conference on Intelligent Systems, Metaheuristics & Swarm Intelligence, 2017: 113-117. |
| 16 |
SHIRANI B , NAJAFI M , IZADI I . Cooperative load transportation using multiple UAVs[J]. Aerospace Science and Technology, 2019, 84, 158- 169.
doi: 10.1016/j.ast.2018.10.027 |
| 17 | FU X W, PAN J, GAO X G, et al. Task allocation method for multi-UAV teams with limited communication bandwidth[C]//Proc. of the 15th International Conference on Control, Automation, Robotics and Vision, 2018: 1874-1878. |
| 18 | SAMIEI A, ISMAIL S, SUN L. Cluster-based hungarian approach to task allocation for unmanned aerial vehicles[C]//Proc. of the IEEE National Aerospace and Electronics Conference, 2019: 148-154. |
| 19 | 林君灿, 贾高伟, 侯中喜. 异构UAV编队反雷达作战中任务分配方法[J]. 系统工程与电子技术, 2018, 40 (9): 1986- 1992. |
| LIN J C , JIA G W , HOU Z X . Research on task assignment of heterogeneous UAV formation in the anti-radar combat[J]. Systems Engineering and Electronics, 2018, 40 (9): 1986- 1992. | |
| 20 | YE F , CHEN J , TIAN Y , et al. Cooperative multiple task assignment of heterogeneous UAVs using a modified genetic algorithm with multi-type-gene chromosome encoding strategy[J]. Journal of Intelligent & Robotic Systems, 2020, 100 (2): 615- 627. |
| 21 | NI J J , TANG M , CHEN Y N , et al. An improved cooperative control method for hybrid unmanned aerial-ground system in multitasks[J]. International Journal of Aerospace Engineering, 2020, 2020, 9429108. |
| 22 | AMJAAD A , HEBA K , KAMAL Y . Fish-inspired task allocation algorithm for multiple unmanned aerial vehicles in search and rescue missions[J]. Remote Sensing, 2020, 13 (27): 27. |
| 23 | CHEN C , BAO W D , MEN T , et al. NECTAR—an agent-based dynamic task allocation algorithm in the UAV swarm[J]. Complexity, 2020, 6747985. |
| 24 | LIU W H , ZHENG X . Three-dimensional multi-mission planning of UAV using improved ant colony optimization algorithm based on the finite-time constraints[J]. International Journal of Computational Intelligence Systems, 2021, 14 (1): 79- 87. |
| 25 |
CHEN X , LIU Y T , YIN L Y , et al. Cooperative task assignment and track planning for multi-UAV attack mobile targets[J]. Journal of Intelligent & Robotic Systems, 2020, 100 (3): 1383- 1400.
doi: 10.1007/s10846-020-01241-w |
| 26 | SUN J, FENG B, XU W B. Particle swarm optimization with particles having quantum behavior[C]//Proc. of the Congress on Evolutionary Computation, 2004. |
| 27 |
MASDARI M , SALEHI F , JALALI M , et al. A survey of PSO-based scheduling algorithms in cloud computing[J]. Journal of Network & Systems Managenment, 2017, 25 (1): 122- 158.
doi: 10.1007/s10922-016-9385-9 |
| 28 |
XU C F , DUAN H B , LIU F . Chaotic artificial bee colony approach to uninhabited combat air vehicle (UCAV) path plan- ning[J]. Aerospace Science and Technology, 2010, 14 (8): 535- 541.
doi: 10.1016/j.ast.2010.04.008 |
| 29 |
ZHANG Z X , YANG R N , LI H Y , et al. Antlion optimizer algorithm based on chaos search and its application[J]. Journal of Systems Engineering and Electronics, 2019, 30 (2): 352- 365.
doi: 10.21629/JSEE.2019.02.14 |
| 30 | 张庆. 基于改进型混沌映射的粒子群算法及其在天线参数优化中的应用[D]. 昆明: 云南大学, 2018. |
| ZHANG Q. Based on improved chaos mapping particle swarm optimization algorithm and its application on optimization of antenna parameter[D]. Kunming: Yunnan University, 2018. | |
| 31 | 李继松. 自适应参数调整量子粒子群算法研究及应用[D]. 长沙: 中南大学, 2014. |
| LI J S. Research and application on adaptive parameter adjusting quantum-behaved particle swarm optimization[D]. Changsha: Central South University, 2014. |
| [1] | Jialei LIU, Jiazhi MA, Longfei SHI. DOA estimation algorithm based on fourth-order cumulant using virtual beam forming [J]. Systems Engineering and Electronics, 2022, 44(7): 2134-2142. |
| [2] | Andi TANG, Tong HAN, Dengwu XU, Huan ZHOU, lei XIE. An improved salp swarm algorithm using Gaussian distribution estimation strategy [J]. Systems Engineering and Electronics, 2022, 44(7): 2229-2240. |
| [3] | Chengfei YUE, Zhenghua XUE, Weiran YAO, Xibin CAO. Cooperative combat task allocation of multiple aerial vehicles based on the characteristic relation [J]. Systems Engineering and Electronics, 2022, 44(6): 1897-1906. |
| [4] | Ruiyang LI, Weibo HUO, Wei MA, Ziyang CHENG. Covariance matrix estimation method based on inverse Gaussian texture distribution [J]. Systems Engineering and Electronics, 2021, 43(9): 2470-2475. |
| [5] | Xiaoyun SHEN, Xianhua LIAO, Weitian SUN, Yabo XIA, Lei YANG. Sparse SAR imaging based on varying prior Bayes learning [J]. Systems Engineering and Electronics, 2021, 43(7): 1781-1790. |
| [6] | Jing ZHOU, Xiaozhe ZHAO, Zhen XU, Zhong LIN, Xiaopan ZHANG. Many-objective task allocation method based on D-NSGA-Ⅲ algorithm for multi-UAVs [J]. Systems Engineering and Electronics, 2021, 43(5): 1240-1247. |
| [7] | WANG Jianhao, ZHANG Liang, SHI Chao, CHE Fei, ZHANG Pengtao. Task allocation modeling and solving algorithm for equipment support using DLS-BCIWBA [J]. Systems Engineering and Electronics, 2018, 40(9): 1979-1985. |
| [8] | CUI Ya-ni, REN Jia, DU Wen-cai. Time-sensitive task dynamic allocation algorithm for multi-UAVs in battlefield environments [J]. Systems Engineering and Electronics, 2016, 38(4): 828-835. |
| [9] | YAO Peiyang1, WAN Lujun1,2, SUN Peng1, ZHOU Xiangxiang3. Dynamic task allocation in multiple agent groups based on RHPIVFSA [J]. Systems Engineering and Electronics, 2014, 36(7): 1309-1319. |
| [10] | SUN Tian-yu, SHI Yi-min, WEI Wei. Reliability analysis for B-S components under progressive hybrid Type I censoring test [J]. Systems Engineering and Electronics, 2014, 36(11): 2326-2331. |
| [11] | WAN Lu-jun, YAO Pei-yang, SUN Peng. Distributed task allocation method of manned/unmanned combat Agents [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 310-316. |
| [12] | LIANG Xiao-long,HU Jun-hua,JING Xian-yong,LIU An,FENG Jin-fu. Multi-stage optimization model and algorithm for near space multi-weapon platform attacking ground targets [J]. Journal of Systems Engineering and Electronics, 2010, 32(12): 2618-2622. |
| [13] | TANG Suyan,ZHU Yifan,LI Qun,LEI Yonglin. Survey of task allocation in multi Agent systems [J]. Journal of Systems Engineering and Electronics, 2010, 32(10): 2155-2161. |
| [14] | LI Wei-xiang, ZHANG Guang-ming, LI Bang-yi. Research on multi-attributes task allocation mechanism in MAS [J]. Journal of Systems Engineering and Electronics, 2009, 31(5): 1113-1116. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||