Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (4): 1127-1133.doi: 10.12305/j.issn.1001-506X.2023.04.21
• Guidance, Navigation and Control • Previous Articles
UAV localization method with multi-view fusion
Yang PANG1, Ming WANG2,*, Ziyi YAN3, Tongyao YUE4, Zhe ZHOU1
- 1. School of Instrument Science and Optoelectronic Engineering, Beihang University, Beijing 100191, China
2. Institute of Unmanned Systems, Beihang University, Beijing 100191, China
3. Xi'an Flight Automatic Control Research Institute, Xi'an 710018, China
4. Beijing Institute of Control and Electronics Technology, Beijing 100082, China
-
Received:2022-04-24Online:2023-03-29Published:2023-03-28 -
Contact:Ming WANG
CLC Number:
Cite this article
Yang PANG, Ming WANG, Ziyi YAN, Tongyao YUE, Zhe ZHOU. UAV localization method with multi-view fusion[J]. Systems Engineering and Electronics, 2023, 45(4): 1127-1133.
share this article

Fig.1
Dual-view positioning schematic"

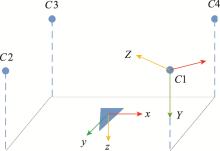
Fig.2
Measurement environment"
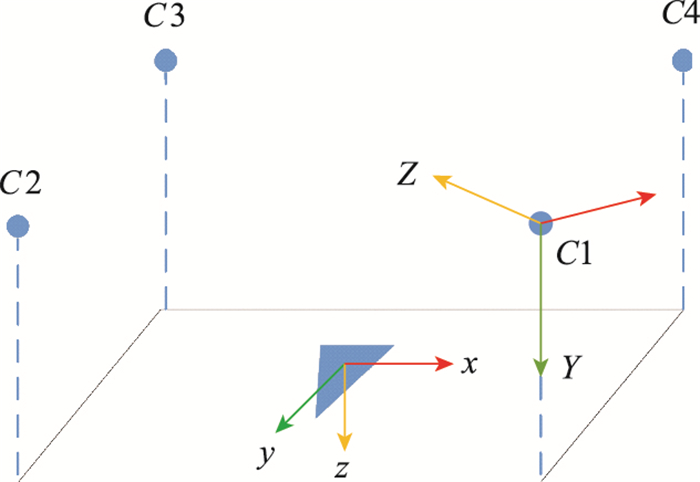
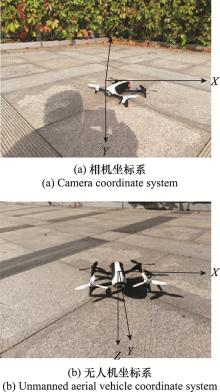
Fig.3
Coordinate system"
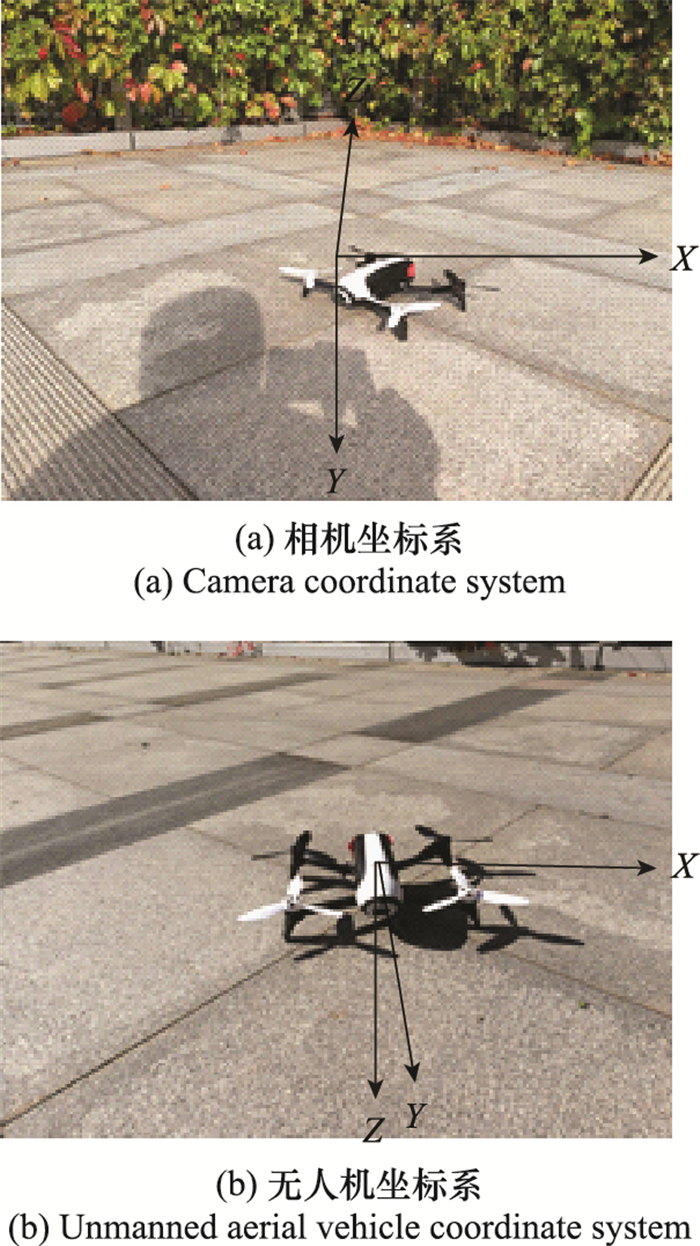

Fig.4
Overhead sketch of the measurement system"
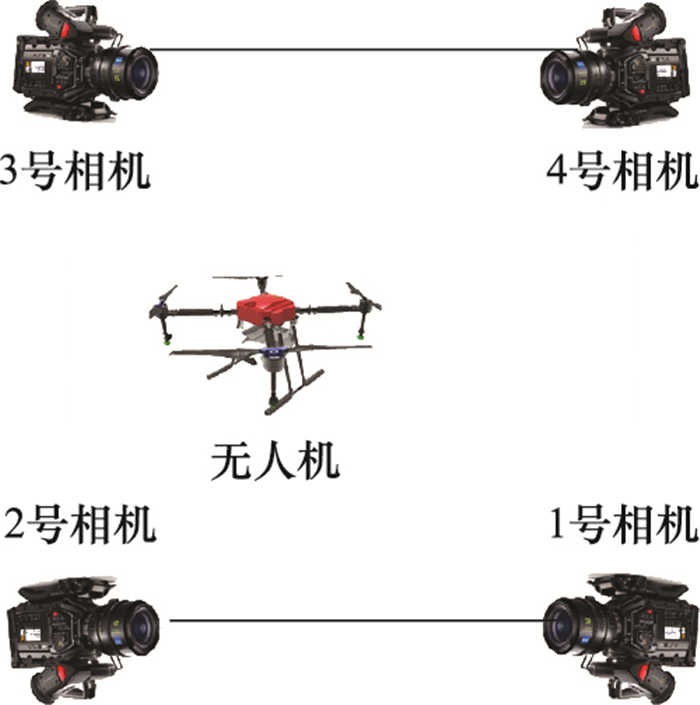
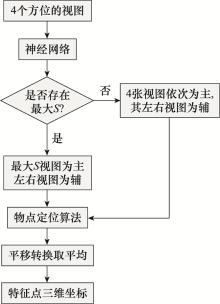
Fig.5
Multi-view fusion position measurement process"
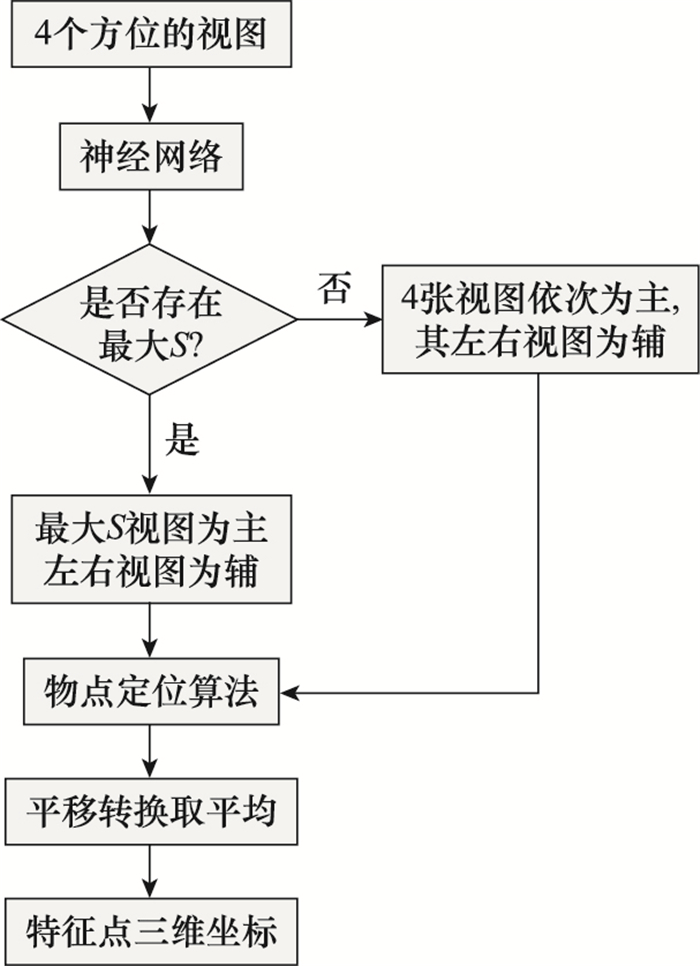

Fig.6
Camera imaging error diagram"
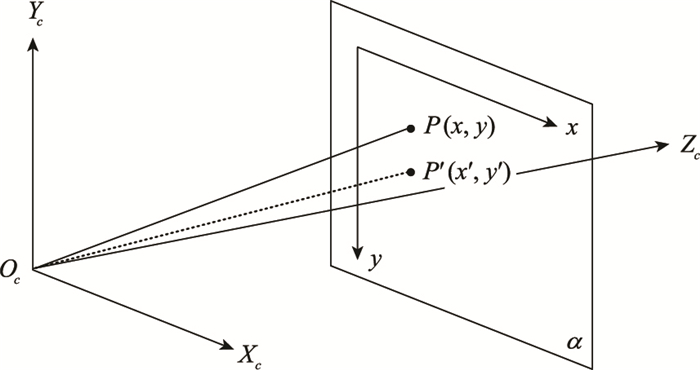
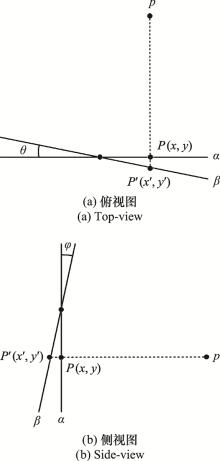
Fig.7
Camera imaging error analysis"
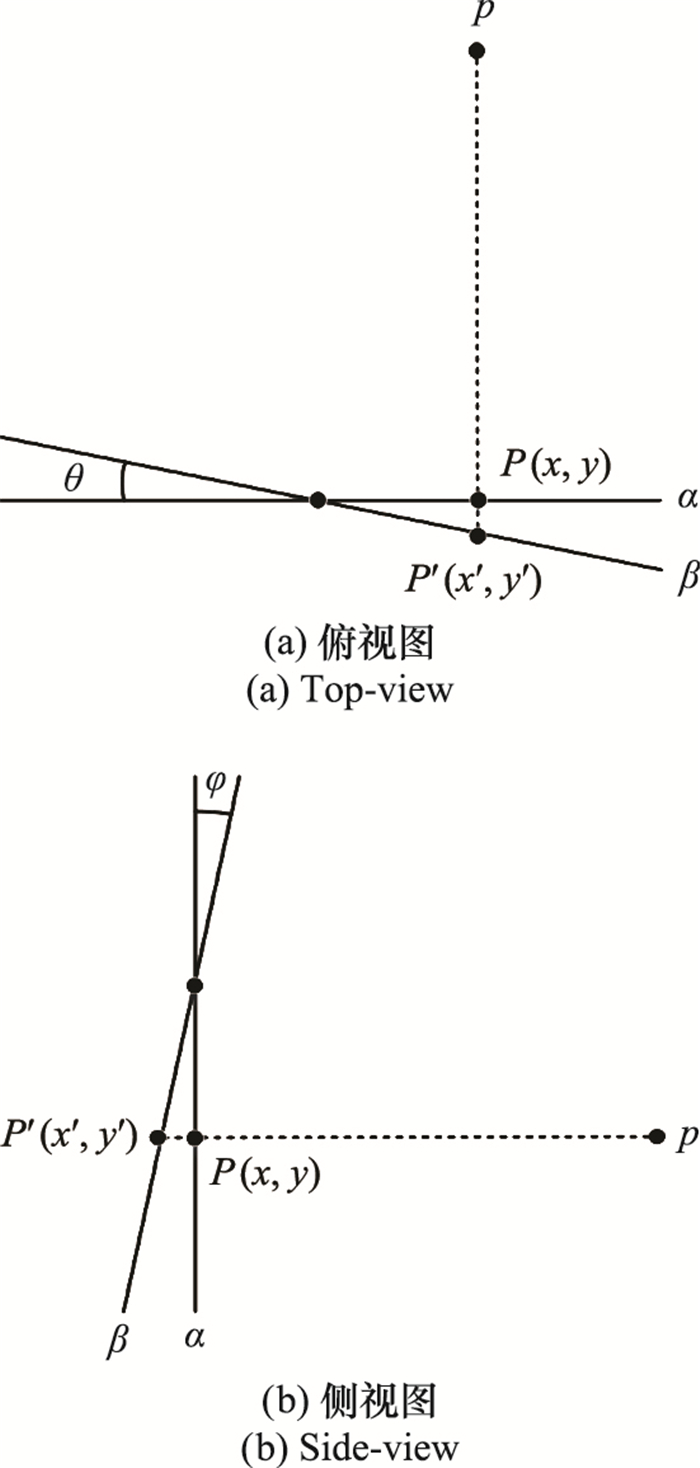
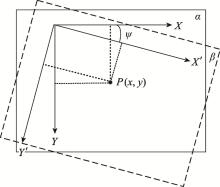
Fig.8
Effect of cross-roll angle error on positioning accuracy"


Fig.9
Multi-view data"
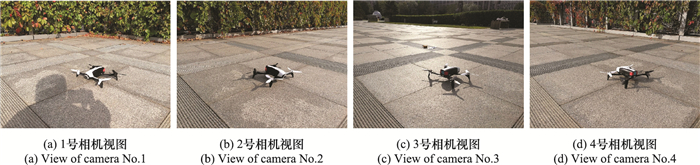
Table 1
Multi-view position measurement results cm"
| 序号 | 真实位置(x, y, z) | 测量位置(x, y, z) | 平均测量位置(x, y, z) | 测量误差(x, y, z) |
| 1 | (5, 32, 50) | (3.56, 31.12, 51.42) | (3.04, 30.97, 50.73) | (1.96, 1.03, 0.73) |
| (2.12, 30.94, 50.69) | ||||
| (3.44, 30.84, 50.09) | ||||
| 2 | (5, 32, 60) | (1.83, 32.87, 56.93) | (2.55, 32.91, 57.08) | (2.45, 0.91, 2.92) |
| (3.07, 32.91, 57.00) | ||||
| (2.74, 32.96, 57.32) | ||||
| 3 | (5, 32, 70) | (4.44, 34.9, 72.11) | (4.68, 35.16, 71.88) | (0.32, 3.16, 1.88) |
| (5.37, 35.58, 72.01) | ||||
| (4.23, 35.00, 71.52) | ||||
| 4 | (5, 32, 80) | (5.77, 34.99, 77.41) | (4.92, 34.98, 77.53) | (0.08, 2.98, 2.47) |
| (3.99, 35.02, 77.07) | ||||
| (5.01, 34.93, 78.12) | ||||
| 5 | (5, 32, 90) | (4.1, 31.44, 93.35) | (4.61, 31.70, 92.81) | (0.39, 0.3, 2.81) |
| (6.83, 31.47, 93.33) | ||||
| (2.92, 32.2, 91.77) | ||||
| 6 | (5, 32, 100) | (6.06, 30.39, 98.63) | (6.13, 29.90, 99.80) | (1.13, 2.10, 0.2) |
| (5.29, 29.42, 100.79) | ||||
| (7.06, 29.89, 99.98) | ||||
| 7 | (-18, 32, 73) | (-18.3, 31.23, 76.06) | (-18.4, 31.46, 76.01) | (0.4, 0.54, 3.01) |
| (-18.2, 31.41, 75.85) | ||||
| (-18.8, 31.75, 76.14) | ||||
| 8 | (28, 32, 73) | (27.14, 31.62, 70.13) | (27.6, 31.26, 70.44) | (0.4, 0.73, 2.56) |
| (28.3, 30.88, 70.38) | ||||
| (27.32, 31.3, 70.84) |
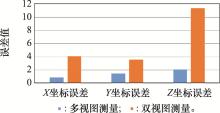
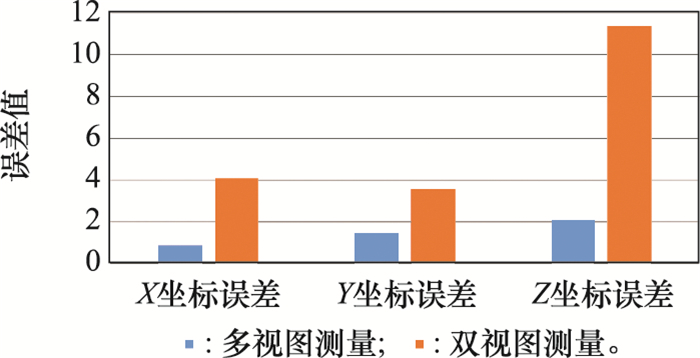
Fig.10
Comparison of position measurement error between multi-view and dual-view"
| 1 | 卢元杰, 刘志敏, 孙智孝. 基于模型的无人机系统架构综合评估方法[J]. 系统工程与电子技术, 2022, 44 (4): 1239- 1245. |
| LU Y J , LIU Z M , SUN Z X . Model-based integrated evaluation of UAV system architecture[J]. Systems Engineering and Electronics, 2022, 44 (4): 1239- 1245. | |
| 2 |
MIHO I , TAKATOSHI S . A novel drone's height control algorithm for throughput optimization in disaster resilient network[J]. IEEE Trans.on Vehicular Technology, 2020, 69 (12): 16188- 16190.
doi: 10.1109/TVT.2020.3032151 |
| 3 |
MOZAFFARI M , SAAD W , BENNIS M , et al. Communications and control for wireless drone-based antenna array[J]. IEEE Trans.on Communications, 2019, 67 (1): 820- 834.
doi: 10.1109/TCOMM.2018.2871453 |
| 4 | 谷旭平, 唐大全. 基于联邦滤波算法的无人机集群分层协同导航[J]. 系统工程与电子技术, 2022, 44 (3): 967- 976. |
| GU X P , TANG D Q . Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm[J]. Systems Engineering and Electronics, 2022, 44 (3): 967- 976. | |
| 5 |
SAMIRA H , ROLAND J , HERMANN H , et al. Edge computing in 5G for drone navigation: what to offload?[J]. IEEE Robotics and Automation Letters, 2021, 6 (2): 2571- 2578.
doi: 10.1109/LRA.2021.3062319 |
| 6 |
NICULESCU V , LAMBERTI L , CONTI F , et al. Improving autonomous nano-drones performance via automated end-to-end optimization and deployment of DNNs[J]. IEEE Journal on Emerging and Selected Topics in Circuits and Systems, 2021, 11 (4): 548- 562.
doi: 10.1109/JETCAS.2021.3126259 |
| 7 |
CHHIKARA P , TEKCHANDANI R , KUMAR N , et al. DCNN-GA: a deep neural net architecture for navigation of UAV in indoor environment[J]. IEEE Internet of Things Journal, 2021, 8 (6): 4448- 4460.
doi: 10.1109/JIOT.2020.3027095 |
| 8 | 宗群, 王丹丹, 邵士凯, 等. 多无人机协同编队飞行控制研究现状及发展[J]. 哈尔滨工业大学学报, 2017, 49 (3): 1- 14. |
| ZONG Q , WANG D D , SHAO S K , et al. Research status and development of multi UAV coordinated formation flight control[J]. Journal of Harbin Institute of Technology, 2017, 49 (3): 1- 14. | |
| 9 |
TEIXEIRA M A S , NEVES-JR F , KOUBAA A , et al. A quadral-fuzzy control approach to flight formation by a fleet of unmanned aerial vehicles[J]. IEEE Access, 2020, 8, 64366- 64381.
doi: 10.1109/ACCESS.2020.2985032 |
| 10 |
YASIN J N , MOHAMED S A S , HAGHBAYAN M H , et al. Energy-efficient formation morphing for collision avoidance in a swarm of drones[J]. IEEE Access, 2020, 8, 170681- 170695.
doi: 10.1109/ACCESS.2020.3024953 |
| 11 |
DUNN J , TRON R . Temporal siamese networks for clutter mitigation applied to vision-based quadcopter formation control[J]. IEEE Robotics and Automation Letters, 2021, 6 (1): 32- 39.
doi: 10.1109/LRA.2020.3028056 |
| 12 |
PARK S , LEE K , SONG H , et al. Low-power, bio-inspired time-stamp-based 2-D optic flow sensor for artificial compound eyes of micro air vehicles[J]. IEEE Sensors Journal, 2019, 19 (24): 12059- 12068.
doi: 10.1109/JSEN.2019.2938559 |
| 13 |
LEE J , RYU H , KIM H J . Stable flight of a flapping-wing micro air vehicle under wind disturbance[J]. IEEE Robotics and Automation Letters, 2020, 5 (4): 5685- 5692.
doi: 10.1109/LRA.2020.3009064 |
| 14 |
LEE H , SEO H , KIM H G . Trajectory optimization and replanning framework for a micro air vehicle in cluttered environments[J]. IEEE Access, 2020, 8, 135406- 135415.
doi: 10.1109/ACCESS.2020.3011401 |
| 15 | 陈飞鹏, 张民. 无人机跟踪地面目标无碰撞航迹规划[J]. 兵工自动化, 2022, 41 (3): 40- 44. |
| CHEN F P , ZHANG M . Collision free path planning for UAV tracking ground target[J]. Ordnance Industry Automation, 2022, 41 (3): 40- 44. | |
| 16 |
SRINIVASA S S , FERGUSON D , HELFRICH C J , et al. HERB: a home exploring robotic butler[J]. Autonomous Robots, 2010, 28 (1): 5- 20.
doi: 10.1007/s10514-009-9160-9 |
| 17 |
HU S Y , NI W , WANG X , et al. Joint optimization of trajectory, propulsion, and thrust powers for covert UAV-on-UAV video tracking and surveillance[J]. IEEE Trans.on Information Forensics and Security, 2021, 16, 1959- 1972.
doi: 10.1109/TIFS.2020.3047758 |
| 18 |
XIA Z Y , DU J , WANG J J , et al. Multi-agent reinforcement learning aided intelligent UAV swarm for target tracking[J]. IEEE Trans.on Vehicular Technology, 2022, 71 (1): 931- 945.
doi: 10.1109/TVT.2021.3129504 |
| 19 | D'AMICO S , BENN M , JORGENSEN J L . Pose estimation of an uncooperative spacecraft from actual space imagery[J]. International Journal of Space Science & Engineering, 2014, 2 (2): 171- 189. |
| 20 |
ZHU K , ZHANG T . Deep reinforcement learning based mobile robot navigation: a review[J]. Tsinghua Science and Technology, 2021, 26 (5): 674- 691.
doi: 10.26599/TST.2021.9010012 |
| 21 |
PEREIRA F U , BRASIL P M A , CUADROS A S L , et al. Analysis of local trajectory planners for mobile robot with robot operating system[J]. IEEE Latin America Transactions, 2022, 20 (1): 92- 99.
doi: 10.1109/TLA.2022.9662177 |
| 22 | ZHANG Y X, WANG C J. Research on robot manipulator servo control based on force and vision sensing[C]//Proc. of the IEEE International Conference on Intelligent Human-machine Systems & Cybernetics, 2013: 52-56. |
| 23 | 张熠玲, 杨燕, 周威, 等. CMvSC: 知识迁移下的深度一致性多视图谱聚类网络[J]. 软件学报, 2022, 33 (4): 1373- 1389. |
| ZHANG Y L , YANG Y , ZHOU W , et al. Knowledge transferring based deep consensus network for multi-view spectral clustering[J]. Journal of Software, 2022, 33 (4): 1373- 1389. | |
| 24 | KADKHODAMOHAMMADI A, PADOY N. A generalizable approach for multi-view 3D human pose regression[EB/OL]. [2022-06-18]. https://arxiv.org/abs/1804.10462v1. |
| 25 | 单玉泽. 基于特征融合与在线学习的行人检测算法研究与实现[D]. 南京: 南京邮电大学, 2016. |
| SHAN Y Z. Research and implementation of pedestrian detection algorithm based on feature fusion and online learning[D]. Nanjing: Nanjing University of Posts and Telecommunications, 2016. | |
| 26 | MATSUMOTO K, YAMAZAKI K. An object classification framework based on unmeasurable area patterns found in 3D range images[C]//Proc. of the IEEE International Conference on Automation Science and Engineering, 2014: 242-248. |
| 27 | CHEN C , ZHUANG Y T , NIE F P , et al. Learning a 3D human pose distance metric from geometric pose descriptor[J]. IEEE Trans.on Visualization and Computer Graphics, 2011, 17 (11): 1676- 1689. |
| 28 | CAO J , HU Y , YU B , et al. 3D aided duet GANs for multi-view face image synthesis[J]. IEEE Trans.on Information Forensics and Security, 2019, 14 (8): 2028- 2042. |
| 29 | MARTIN J, ANGELINA H, HEREDIA G, et al. Fault detection for autonomous aerial refueling[C]//Proc. of the IEEE Research, Education & Development of Unmanned Aerial Systems, 2016: 92-101. |
| 30 | WANG Z C , LI Z Q , WANG B , et al. Robot grasp detection using multimodal deep convolutional neural networks[J]. Advances in Mechanical Engineering, 2016, 8 (9): 1687814016668077. |
| 31 | YANG J D, WANG Q, CONG B, et al. Rocket booster recovery analysis[C]//Proc. of the 2nd International Conference on Artificial Intelligence and Advanced Manufacture, 2020: 420-422. |
| 32 | 陈维兴, 王琛, 陈斌. 点线融合双目定位与建图多维提升方法[J]. 计算机应用研究, 2022, 39 (3): 956- 960. |
| CHEN W X , WANG C , CHEN B . Multi-dimensional improving method for point-line fusion stereo SLAM[J]. Application Research of Computers, 2022, 39 (3): 956- 960. | |
| 33 | 成禹. 基于双目视觉的多目标识别与定位方法研究[D]. 哈尔滨: 哈尔滨理工大学, 2021. |
| CHENG Y. Research on multi-target recognition and localization based on binocular vision[D]. Harbin: Harbin University of Science and Technology, 2021. | |
| 34 | MA W P , LI W X , CAO P X , et al. Binocular vision object positioning method for robots based on coarse-fine stereo matching[J]. International Journal of Automation and Computing, 2020, 17 (4): 86- 95. |
| [1] | Zihan SHEN, Xiubin ZHAO, Chuang ZHANG, Liang ZHANG, Xinxian LIU. Adaptive fault-tolerant method based on long-short term memory neural network [J]. Systems Engineering and Electronics, 2023, 45(3): 831-838. |
| [2] | Yunhua RAO, Hualiang ZHU, Zhijie ZHENG. Direct position determination of transmitter based on cooperative target in passive radar [J]. Systems Engineering and Electronics, 2023, 45(2): 394-400. |
| [3] | Yanzhi HU, Fengbin ZHANG, Tian TIAN, Qihang CHEN. Multi-UAV-BS layout approach for maximum coverage of users [J]. Systems Engineering and Electronics, 2023, 45(2): 580-588. |
| [4] | Shengyang HE, Jiepeng DU, Yaqin ZHAO, Baoying WANG, Liang ZHAO, Longwen WU. TDOA-based cooperative single target location using UAV cluster [J]. Systems Engineering and Electronics, 2023, 45(1): 1-8. |
| [5] | Hengyi ZHAN, Yachao LI, Chunfeng WU, Xuan SONG, Tinghao ZHANG. Analytic-iterative positioning method for missile-borne bistatic forward-looking imaging radar [J]. Systems Engineering and Electronics, 2023, 45(1): 71-78. |
| [6] | Kun FANG, Xiaohui LI, Tao FAN. High-precision positioning algorithm for UAV based on random forest weight compensation [J]. Systems Engineering and Electronics, 2023, 45(1): 202-209. |
| [7] | Xiaowei WANG, Yafeng ZHAN, Haoran XIE, Xi CHEN. A preliminary study on the design of constellation orbiting the moon with the communication and navigation integration [J]. Systems Engineering and Electronics, 2023, 45(1): 241-249. |
| [8] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [9] | Jing YU, Enmi YONG, Hanyang CHEN, Dong HAO, Xiancai ZHANG. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack [J]. Systems Engineering and Electronics, 2022, 44(9): 2849-2857. |
| [10] | Jianfeng YANG, Heye XIAO, Liang LI, Junqiang BAI, Weihao DONG. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism [J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. |
| [11] | Huachao WANG, Jing LIU, Haowen CHENG, Xiyan PENG. Fast star map recognition algorithm based on fuzzy decision [J]. Systems Engineering and Electronics, 2022, 44(5): 1447-1453. |
| [12] | Yuanjie LU, Zhimin LIU, Zhixiao SUN, Dong KAN. Model-based integrated evaluation of UAV system architecture [J]. Systems Engineering and Electronics, 2022, 44(4): 1239-1245. |
| [13] | Yuanyuan ZHANG, Yang GAO, Peng ZHU, Jintao LIU, Shushan GU. UAV reconnaissance tactical planning based on colored Petri nets [J]. Systems Engineering and Electronics, 2022, 44(3): 900-907. |
| [14] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [15] | Xueyong YU, Ye ZHU, Lixiang QIU, Hongbo ZHU. Energy efficient offloading strategy for UAV aided edgecomputing systems [J]. Systems Engineering and Electronics, 2022, 44(3): 1022-1029. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||