Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (5): 1451-1460.doi: 10.12305/j.issn.1001-506X.2023.05.21
• Guidance, Navigation and Control • Previous Articles
Landing control algorithm of rotor UAV based on DQN
Jin TANG1,2, Yangang LIANG1,2,*, Zhihui BAI3, Kebo LI1,2
- 1. College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China
2. Hunan Key Laboratory of Intelligent Planning and Simulation for Aerospace Mission, Changsha 410073, China
3. Unit 31102 of the PLA, Nanjing 210000, China
-
Received:2022-06-01Online:2023-04-21Published:2023-04-28 -
Contact:Yangang LIANG
CLC Number:
Cite this article
Jin TANG, Yangang LIANG, Zhihui BAI, Kebo LI. Landing control algorithm of rotor UAV based on DQN[J]. Systems Engineering and Electronics, 2023, 45(5): 1451-1460.
share this article
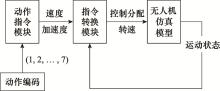
Fig.1
Unmanned aerial vehicle control structure"
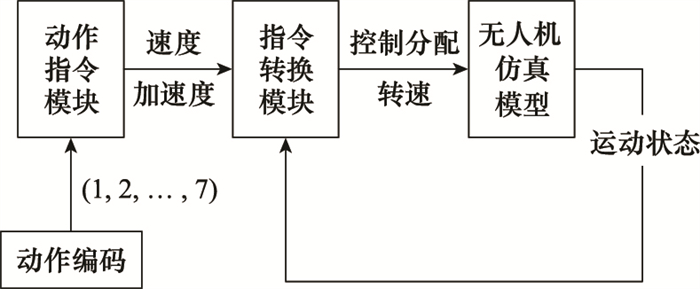
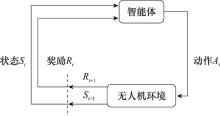
Fig.2
Basic principles of RL"
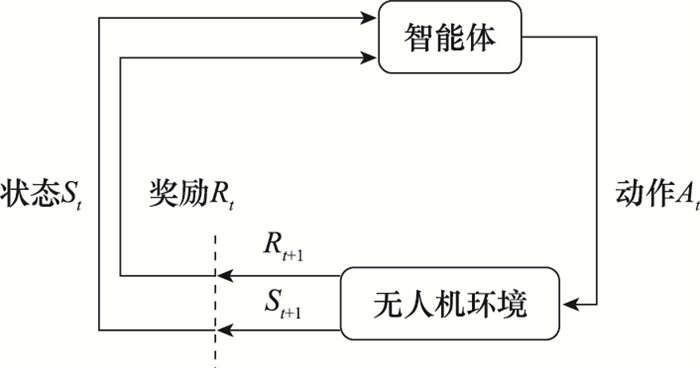
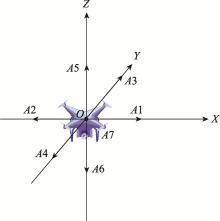
Fig.3
Schematic diagram of unmanned aerial vehicle discrete action space"
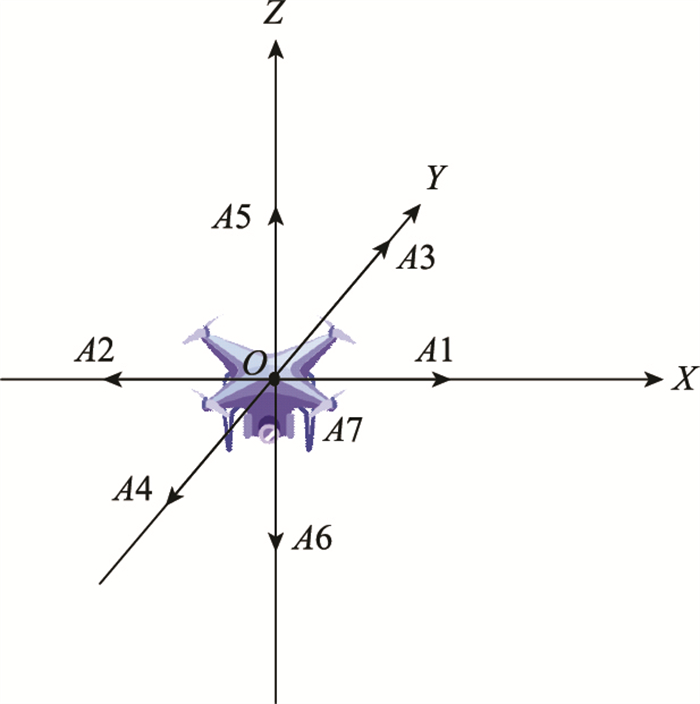

Fig.4
Speed response of unmanned aerial vehicle moving up and down"
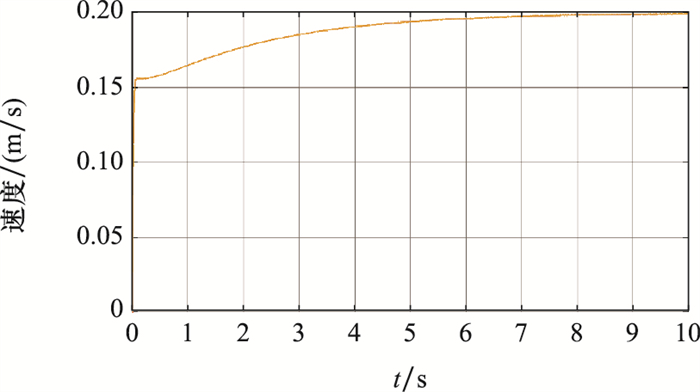

Fig.5
Acceleration response of unmanned aerial vehicle moving forward, backward, left and right"
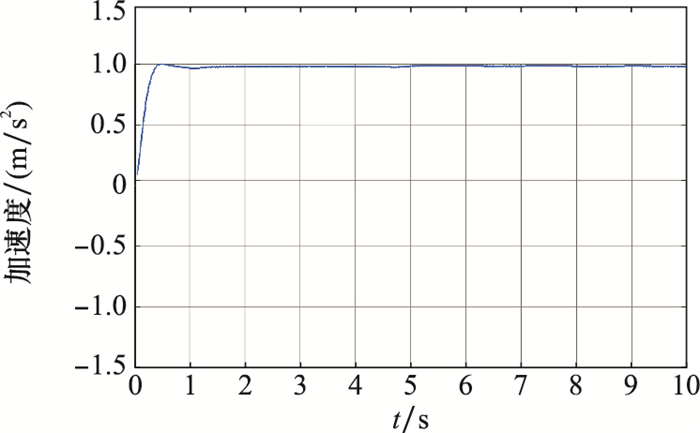
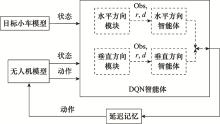
Fig.6
DQN simulation model"
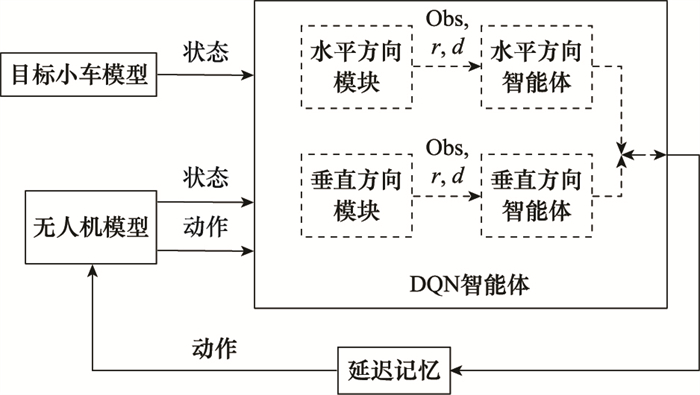
Table 1
The parameter of DQN algorithm"
| 参数 | 水平方向 | 垂直方向 |
| 经验回放池大小 | 106 | 104 |
| 目标网络更新步长 | 10 | 10 |
| 仿真时长/s | 120 | 120 |
| 控制周期/s | 0.2 | 0.2 |
| 折扣因子 | 0.99 | 0.99 |
| 学习率 | 0.000 1 | 0.000 1 |
| 贪婪度 | 0.9 | 0.9 |
| 训练回合数 | 1 000 | 500 |
| 批量大小 | 128 | 48 |

Fig.7
Critical network structure"
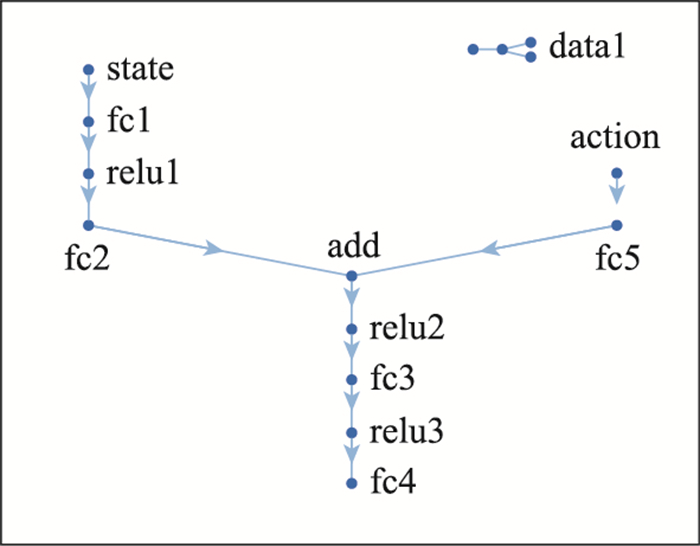
Table 2
The network structure"
| 参数 | 神经元数量 | 激活函数 |
| fc1 | 32 | ReLU |
| fc2 | 32 | ReLU |
| fc3 | 32 | ReLU |
| fc4 | 1 | - |
| fc5 | 32 | ReLU |
Table 3
Training simulation parameters"
| 参数 | 无人机 | 目标小车 |
| 初始位置/m | [0, 0, 0] | [0, 20, 0] |
| 初始速度/(m/s) | [0, 0, 0] | [5, 5, 0] |
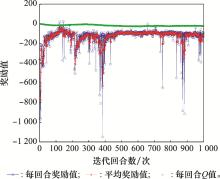
Fig.8
Reward change curve in horizontal direction"

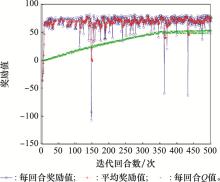
Fig.9
Reward change curve in vertical direction"
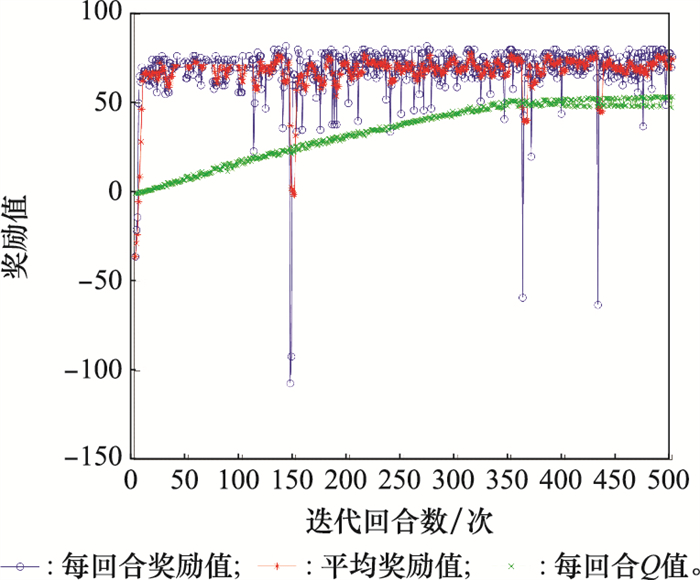
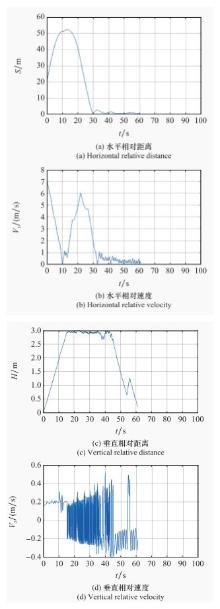
Fig.10
Working condition simulation results of uniform linear motion trolley"
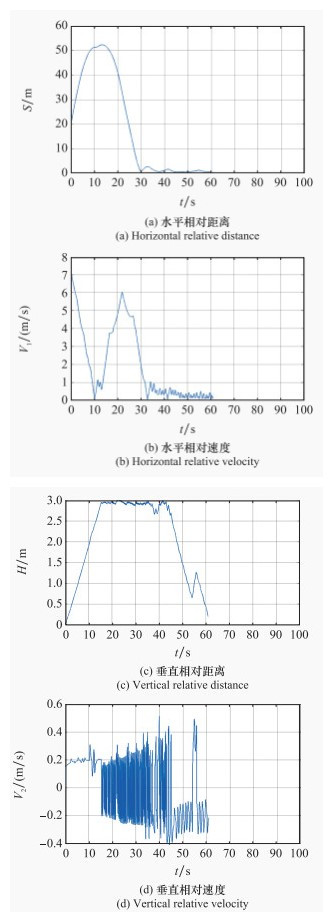
Fig.11
Three dimensional trajectory of uniform linear motion trolley under working condition"
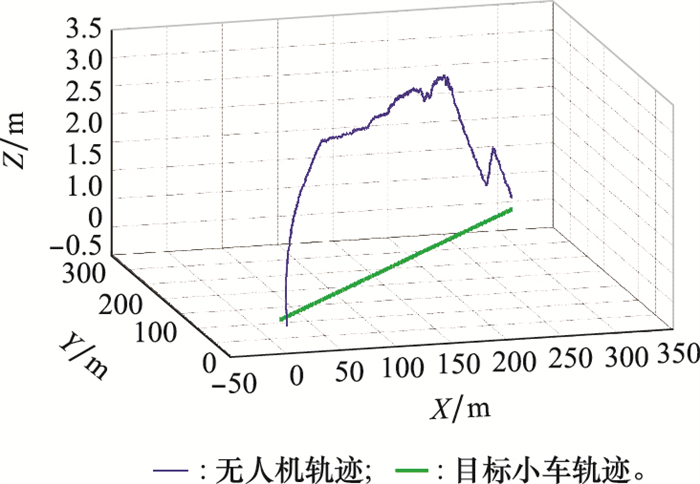
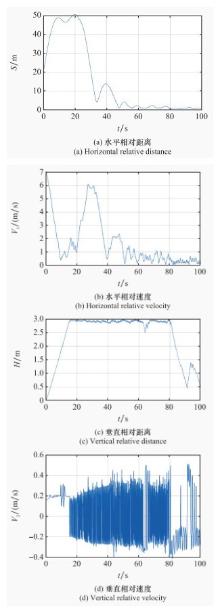
Fig.12
Working condition simulation results of sine motion trolley"
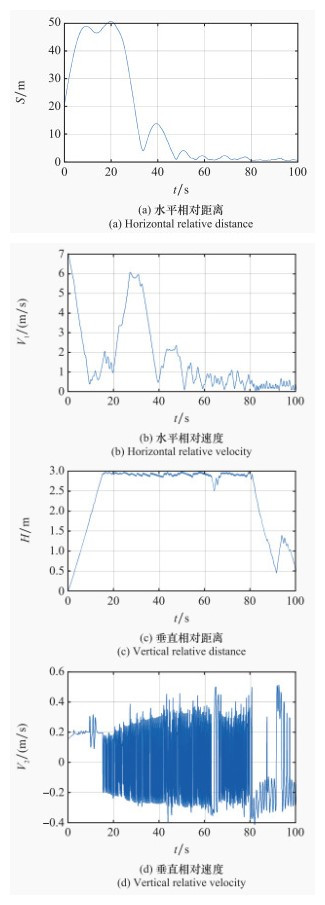
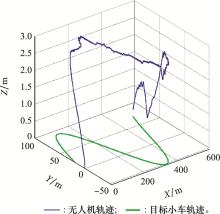
Fig.13
Three dimensional trajectory of sine motion trolley under working condition"
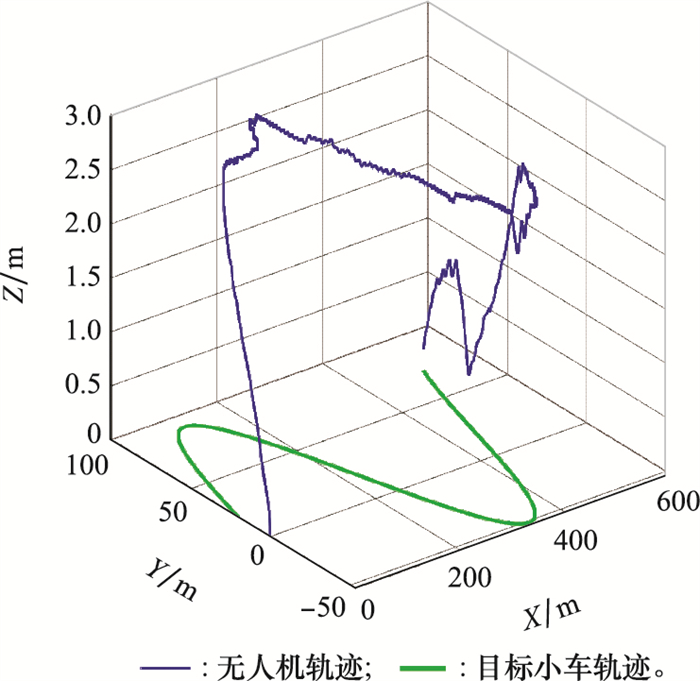
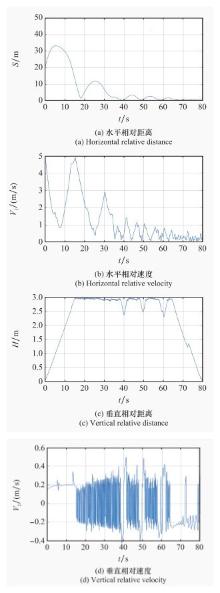
Fig.14
Working condition simulation results of circular motion trolley"
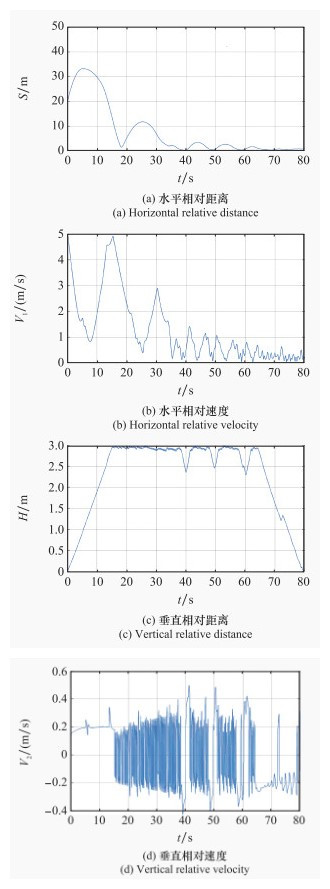
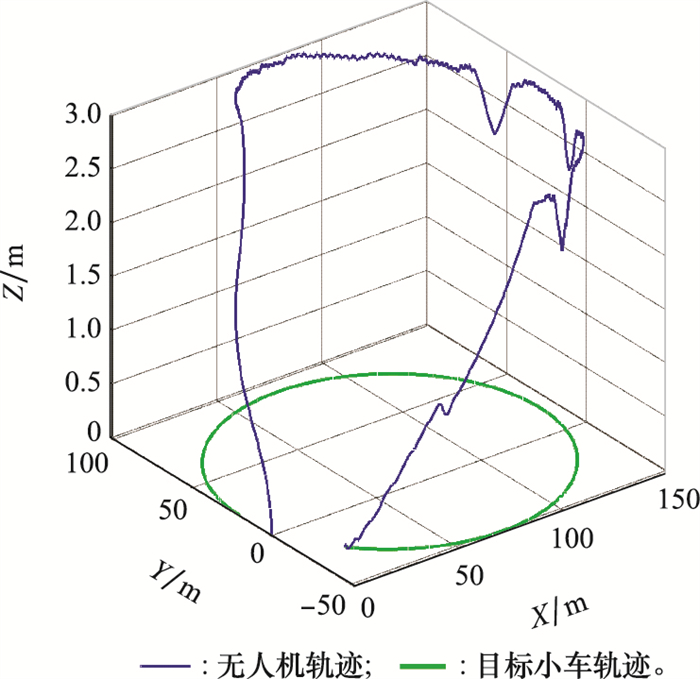
Fig.15
Three dimensional trajectory of circular motion trolley under working condition"
| 1 | 龚有敏. 四旋翼无人机轨迹跟踪与自主着陆控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2017. |
| GONG Y M. Research on trajectory tracking and autonomous landing control of four rotor UAV[D]. Harbin: Harbin Institute of Technology, 2017. | |
| 2 | BELTRAN-CARBAJAL F , YANEZ-BADILLO H , TAPIA-DLVERA R , et al. On active vibration absorption in motion control of a quadrotor UAV[J]. Mathe-matics, 2022, 10 (2): 235. |
| 3 |
LI X H , FANG C , FAN T . Analysis of reflected signal of quad rotor UAV based on model fitting in mobile communication system[J]. Journal of Systems Engineering and Electronics, 2022, 33 (1): 97- 104.
doi: 10.23919/JSEE.2022.000011 |
| 4 | 宁东方. 无人机自动着陆控制系统的设计与实现研究[D]. 西安: 西北工业大学, 2006. |
| NING D F. Design and implementation of automatic landing control system for UAV[D]. Xi'an: Northwestern Polytechnical University, 2006. | |
| 5 |
JING X D , WANG X F . PSO algorithm tuning PI_PID controller parameters of quad-rotor UAV[J]. Journal of Physics: Conference Series, 2022, 2228, 012017.
doi: 10.1088/1742-6596/2228/1/012017 |
| 6 |
YU Z Q , ZHANG Y M , JINANG B . PID-type fault-tolerant prescribed performance control of fixed-wing UAV[J]. Journal of Systems Engineering and Electronics, 2021, 32 (5): 1053- 1061.
doi: 10.23919/JSEE.2021.000090 |
| 7 | HUANG S B , HUANG J F , CAI Z Q , et al. Adaptive backstepping sliding mode control for quadrotor UAV[J]. Scientific Programming, 2021, 2021, 13. |
| 8 |
CHEN J , ZHAO H C . Sliding mode disturbance observer and sliding mode controller for quadrotor UAV[J]. Journal of Phy-sics: Conference Series, 2022, 2296, 012030.
doi: 10.1088/1742-6596/2296/1/012030 |
| 9 | KANG B , MIAO Y , LIU F , et al. A second-order sliding mode controller of quad-rotor UAV based on PID sliding mode surface with unbalanced load[J]. Journal of Systems Science & Complexity, 2021, 34, 520- 536. |
| 10 |
LI Z X , ZHANG R . Time-varying sliding mode control of missile based on suboptimal method[J]. Journal of Systems Engineering and Electronics, 2021, 32 (3): 700- 710.
doi: 10.23919/JSEE.2021.000060 |
| 11 |
MNIH V , KAVUKCUOGLU K , SILVER D , et al. Human-level control through deep reinforcement learning[J]. Nature, 2015, 518 (7540): 529- 533.
doi: 10.1038/nature14236 |
| 12 |
LI Y F , YANG B , YAN L , et al. RETRACTED: energy-aware resource management for uplink non-orthogonal multiple access: multi-agent deep reinforcement learning[J]. Future Generation Computer Systems, 2020, 105, 684- 694.
doi: 10.1016/j.future.2019.12.047 |
| 13 |
KHAN A , JIANG F , LIU S H , et al. Playing a FPS doom video game with deep visual reinforcement learning[J]. Automatic Control and Computer Sciences, 2019, 53 (3): 214- 222.
doi: 10.3103/S0146411619030052 |
| 14 |
PI C H , HU K C , CHENG S , et al. Low-level autonomous control and tracking of quadrotor using reinforcement learning[J]. Control Engineering Practice, 2020, 95, 104222.
doi: 10.1016/j.conengprac.2019.104222 |
| 15 |
LI Y , QIU X H , LIU X D , et al. Deep reinforcement learning and its application in autonomous fitting optimization for attack areas of UCAVs[J]. Journal of Systems Engineering and Electronics, 2020, 31 (4): 734- 742.
doi: 10.23919/JSEE.2020.000048 |
| 16 |
LIN J , WANG Y N , MIAO Z Q , et al. Low-complexity control for vision-based landing of quadrotor UAV on unknown moving platform[J]. IEEE Trans.on Industrial Informatics, 2022, 18 (8): 5348- 5358.
doi: 10.1109/TII.2021.3129486 |
| 17 |
CHANG C W , LO L Y , CHENG H C , et al. Proactive gui-dance for accurate UAV landing on a dynamic platform: a visua -linertial approach[J]. Sensors, 2022, 22 (1): 404.
doi: 10.3390/s22010404 |
| 18 | 邱鹏瑞, 刘筠, 刘聪. 四旋翼无人机单目视觉自主着陆系统研究[J]. 云南民族大学学报(自然科学版), 2019, 28 (3): 289- 292. |
| QIU P R , LIU J , LIU C . Research on monocular vision auto-nomous landing system of four rotor UAV[J]. Journal of Yunnan Nationalities University, 2019, 28 (3): 289- 292. | |
| 19 | 朱飞翔, 高永, 孟浩. 基于参考轨迹的无人机自主着陆控制系统设计与仿真[J]. 海军航空工程学院学报, 2017, 32 (5): 463- 468. |
| ZHU F X , GAO Y , MENG H . Design and simulation of UAV autonomous landing control system based on reference trajectory[J]. Journal of Naval Aeronautical and Astronautical University, 2017, 32 (5): 463- 468. | |
| 20 | 许陈元, 李春涛. 无人机快速着陆控制律设计及仿真验证[J]. 计算机仿真, 2016, 33 (7): 141- 146. |
| XU C Y , LI C T . Design and simulation verification of UAV rapid landing control law[J]. Computer Simulation, 2016, 33 (7): 141- 146. | |
| 21 |
JOHNSON J D , LI J , CHEN Z . Reinforcement learning: an introduction[J]. Neurocomputing, 2000, 35 (1-4): 205- 206.
doi: 10.1016/S0925-2312(00)00324-6 |
| 22 | LOU W J , GUO X . Adaptive trajectory tracking control using reinforcement learning for quadrotor[J]. International Journal of Advanced Robotic Systems, 2016, 13, 679- 709. |
| 23 | 宋欣屿, 王英勋, 蔡志浩, 等. 基于深度强化学习的无人机着陆轨迹跟踪控制[J]. 航空科学技术, 2020, 31 (1): 68- 75. |
| SONG X Y , WANG Y X , CAI Z H , et al. UAV landing trajectory tracking control based on deep reinforcement learning[J]. Aeronautical Science & Technology, 2020, 31 (1): 68- 75. | |
| 24 | 裴培, 何绍溟, 王江, 等. 一种深度强化学习制导控制一体化算法[J]. 宇航学报, 2021, 42 (10): 1293- 1304. |
| PEI P , HE S M , WANG J , et al. An integrated algorithm of deep reinforcement learning guidance and control[J]. Journal of Astronautics, 2021, 42 (10): 1293- 1304. | |
| 25 | ZHANG Y J , HUANG Y J , LIANG K , et al. High-precision modeling and collision simulation of small rotor UAV[J]. Aero-space Science and Technology, 2021, 118, 106977. |
| 26 | KIENINGER S , DONATI L , KELLER B G . Dynamical reweighting methods for Markov models[J]. Current Opinion in Structural Biology, 2020, 61, 124- 131. |
| 27 | LIU Y , CHONG E , PEZESHKI A , et al. Submodular optimization problems and greedy strategies: a survey[J]. Discrete Event Dynamic Systems, 2020, 30, 381- 412. |
| 28 | DOGRU O , CHIPLUNKAR R , HUANG B . Reinforcement learning with constrained uncertain reward function through particle filtering[J]. IEEE Trans.on Industrial Electronics, 2022, 69 (7): 7491- 7499. |
| 29 | GAO X , FANG Y W , WU Y L . Fuzzy Q learning algorithm for dual-aircraft path planning to cooperatively detect targets by passive radars[J]. Journal of Systems Engineering and Electronics, 2013, 24 (5): 800- 810. |
| 30 | GUO J A , WANG Y L , AN H , et al. ⅡDQN: an incentive improved DQN algorithm in EBSN recommender system[J]. Security & Communication Networks, 2022, 2022, 7502248. |
| 31 | SU J J , MA C H , LI S , et al. An AGC dynamic control method based on DQN algorithm[J]. IOP Conference Series: Materials Science and Engineering, 2020, 729 (1): 012009. |
| 32 | MANIATOPOULOS A , MITIANOUDIS N . Learnable leaky ReLU (LeLeLU): an alternative accuracy-optimized activation function[J]. Information, 2021, 12 (12): 513. |
| [1] | Jiaqi BAI, Yankai WANG, Hao XING. Fixed-time heterogeneous formation control of unmanned boats and quadrotor unmanned aerial vehicle [J]. Systems Engineering and Electronics, 2023, 45(4): 1152-1163. |
| [2] | Bakun ZHU, Weigang ZHU, Wei LI, Ying YANG, Tianhao GAO. Multi-function radar intelligent jamming decision method based on prior knowledge [J]. Systems Engineering and Electronics, 2022, 44(12): 3685-3695. |
| [3] | Wenqi YANG, Jianhua LU, Xu JIANG, Yuanxin WANG. Design of quadrotor attitude active disturbance rejection controller based on improved ESO [J]. Systems Engineering and Electronics, 2022, 44(12): 3792-3799. |
| [4] | XIE Hao, GUO Aihuang, SONG Chunlin, JIAO Runze. eNB selection for LTE-V using deep reinforcement learning [J]. Systems Engineering and Electronics, 2019, 41(7): 1652-1657. |
| [5] | WU Wenhai, ZHANG Yang, HU Yun’an, ZHANG Yuanyuan. Research development in nonlinear backstepping control method of carrier-based aircraft landing [J]. Systems Engineering and Electronics, 2018, 40(7): 1578-1587. |
| [6] | SHEN Zhipeng, CAO Xiaoming. Extended state observer based dynamic surface output feedback control for quadrotor UAV trajectory tracking with input constraints#br# [J]. Systems Engineering and Electronics, 2018, 40(12): 2766-2774. |
| [7] | ZHU Wei, MA Weiming, YANG Xidang, XIAO Huan. Tracking control of ship borne quad-roto UAV based on robust fault diagnosis LPV model [J]. Systems Engineering and Electronics, 2018, 40(11): 2540-. |
| [8] | WU Zhenglong1, LI Jie1, GUAN Zhenyu2, NIU Sanku1, YANG Chengwei1, LI Yang3. Optical flowbased autonomous landing control for fixedwing small UAV [J]. Systems Engineering and Electronics, 2016, 38(12): 2827-2834. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||