Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (5): 1409-1419.doi: 10.12305/j.issn.1001-506X.2023.05.17
• Systems Engineering • Previous Articles
Online three-dimensional RRT* cooperative route planning based on hierarchical decomposition
Xiaocao YANG1, Yanli DU1, Yunong BU2,*, Yanbin LIU1, Cheng GAO1
- 1. College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
2. Beijing Institute of Mechanical and Electrical Engineering, Beijing 100854, China
-
Received:2022-03-08Online:2023-04-21Published:2023-04-28 -
Contact:Yunong BU
CLC Number:
Cite this article
Xiaocao YANG, Yanli DU, Yunong BU, Yanbin LIU, Cheng GAO. Online three-dimensional RRT* cooperative route planning based on hierarchical decomposition[J]. Systems Engineering and Electronics, 2023, 45(5): 1409-1419.
share this article
Fig.1
Image of inverse hyperbolic tangent function"
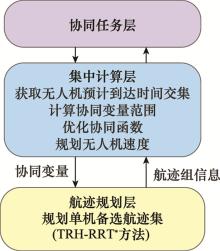
Fig.2
Cooperative online route planning frame for multiple-unmanned aerial vehicle"
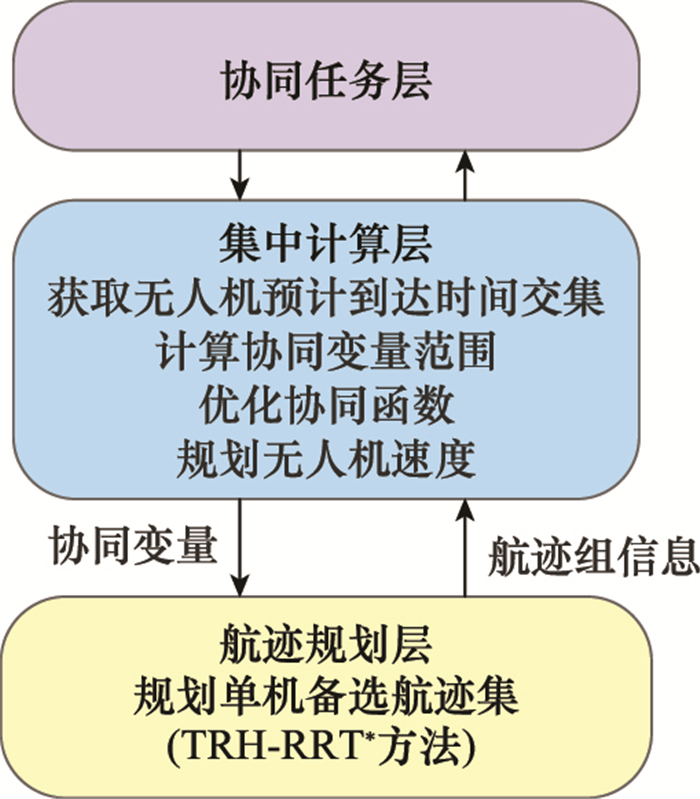
Fig.3
Time cooperative online route planning procedure for multiple-unmanned aerial vehicle"
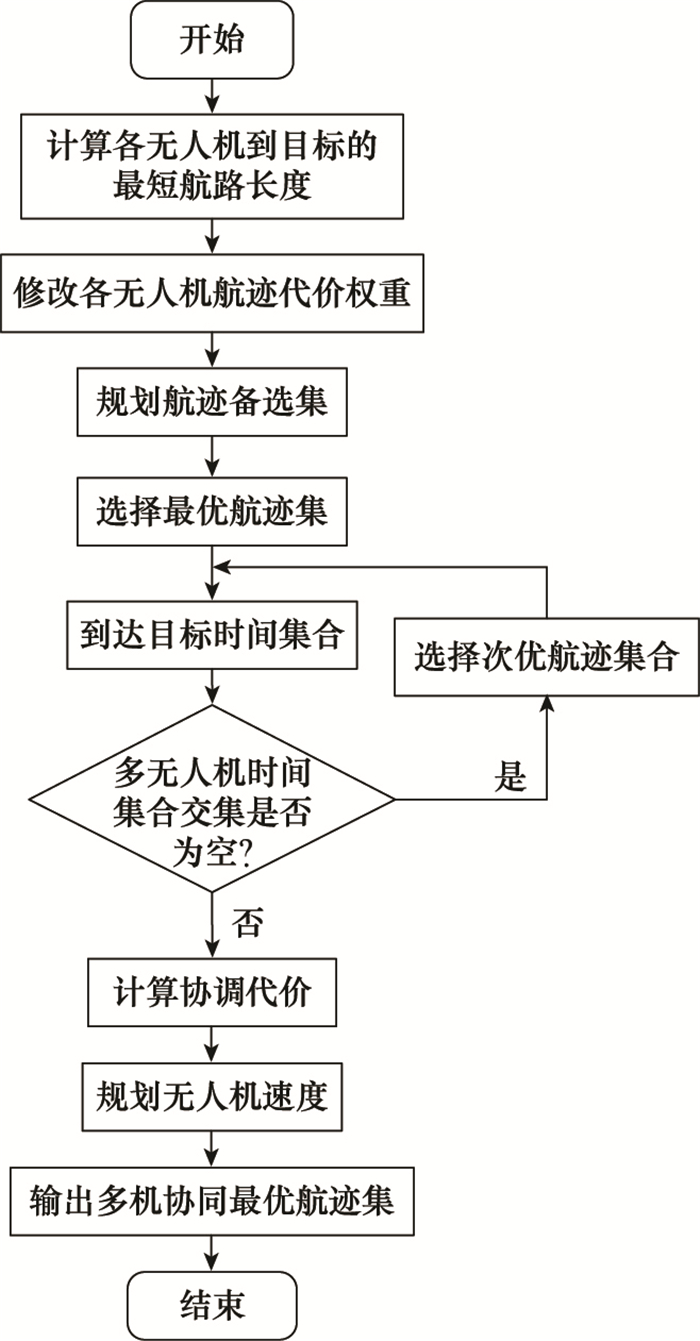
Fig.4
Basic flow of TRH-RRT* algorithm"
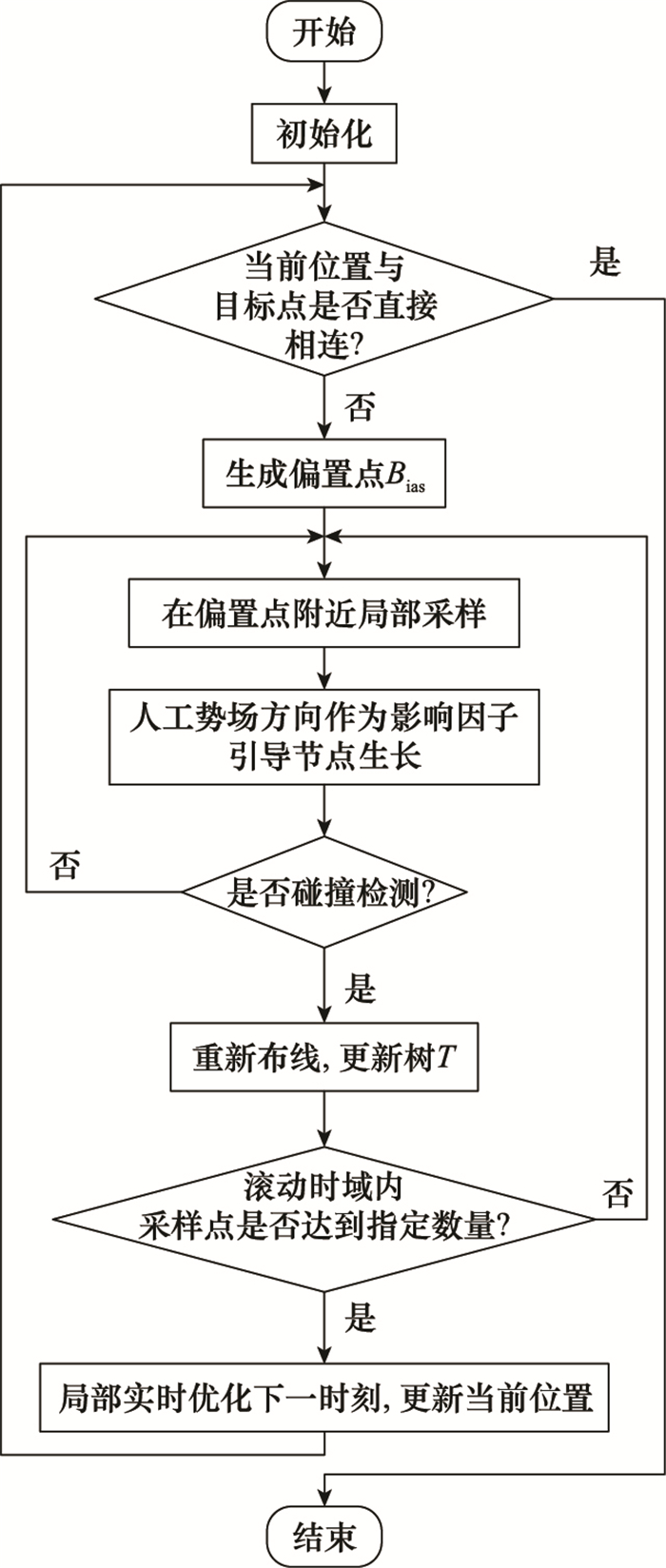

Fig.5
Schematic diagram of reselected routing"
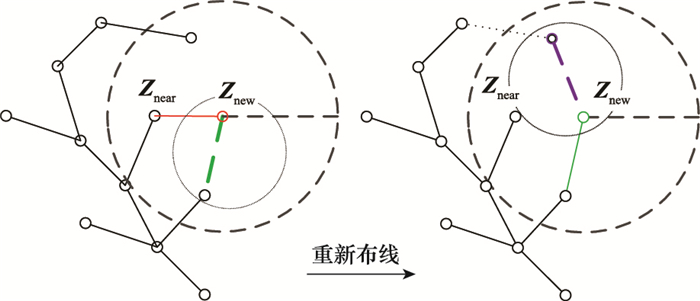
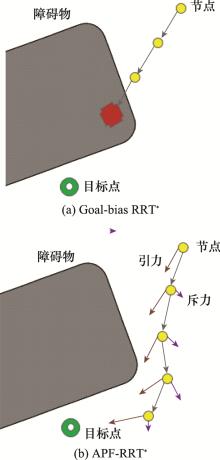
Fig.6
Schematic diagram of Goal-bias RRT* and APF-RRT*"

Fig.7
Schematic diagram of selecting local routes"
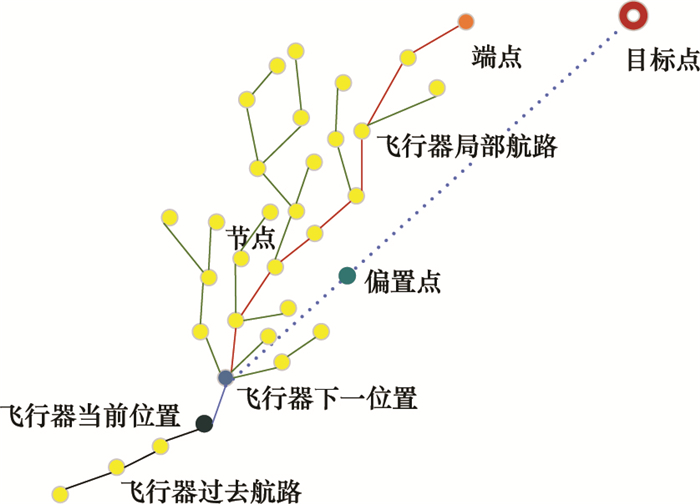
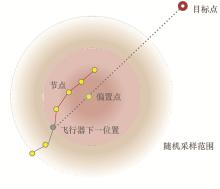
Fig.8
Process of generating biased samples"

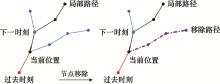
Fig.9
Node removal process"
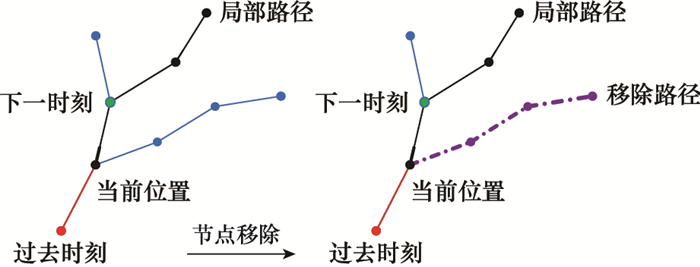
Fig.10
Simulation process of node removal"
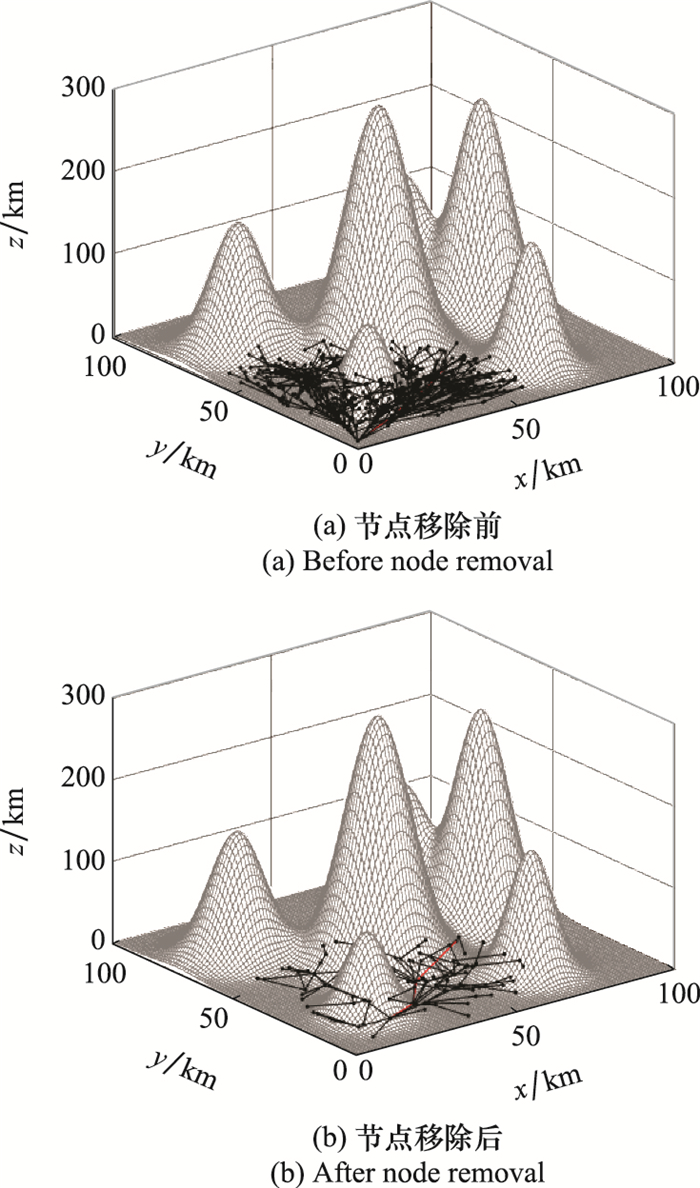

Fig.11
Simulation comparison diagrams of three RRT* algorithms"
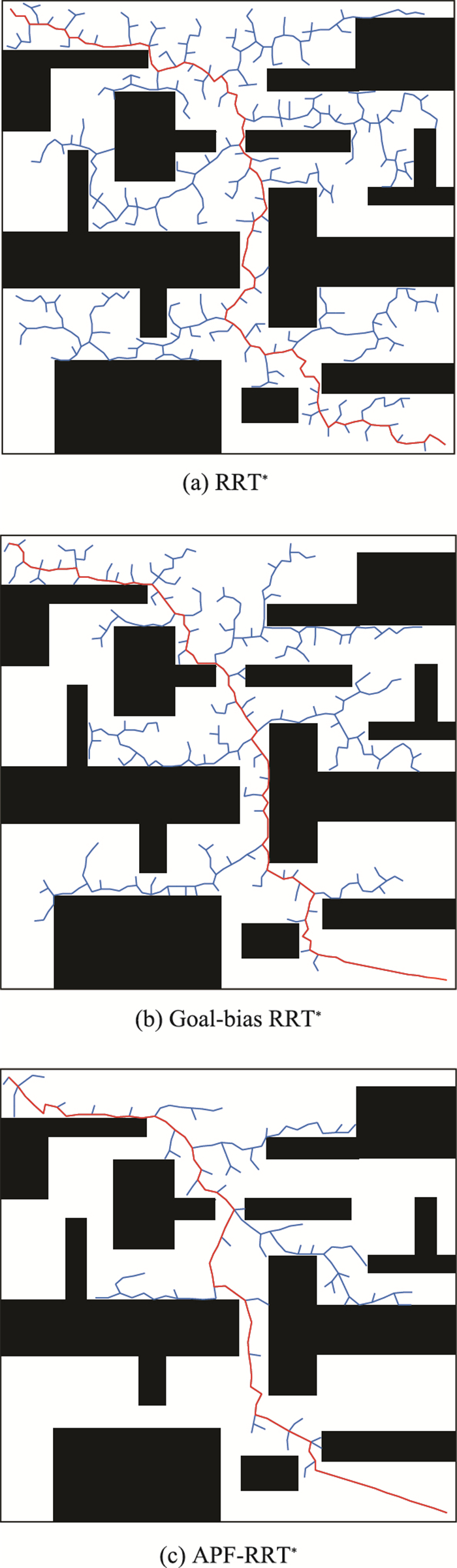

Fig.12
Comparison of APF-RRT* and TRH-RRT* simulation results"
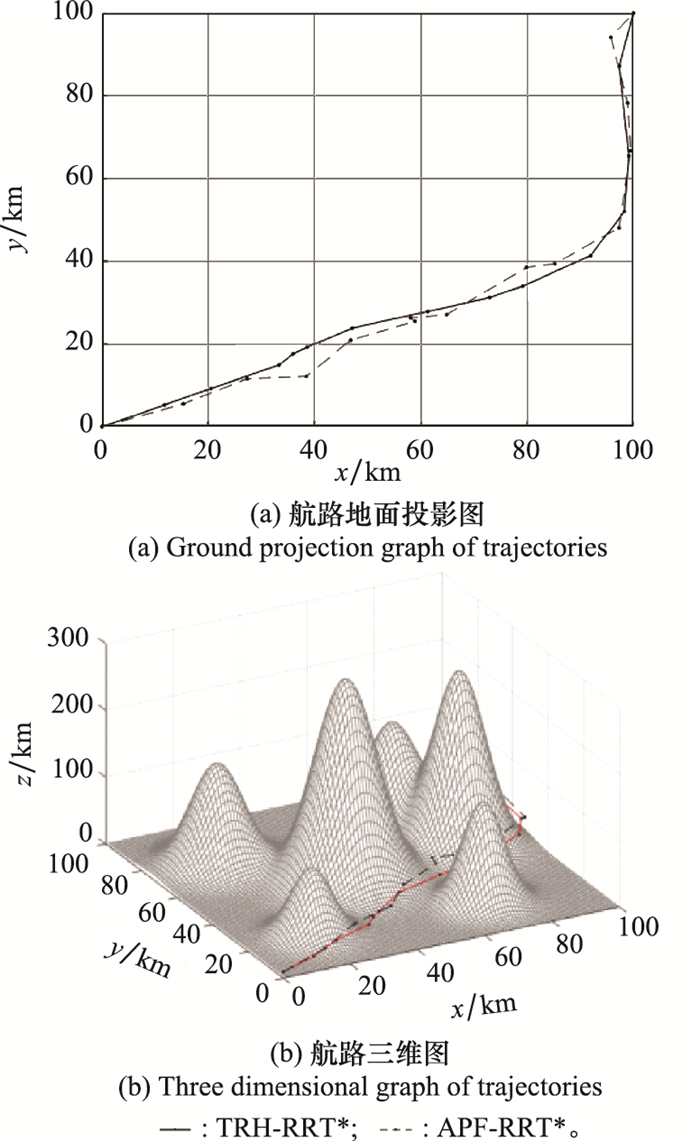
Table 1
Comparison of simulation data of two methods"
| 比较指标 | 规划时间/s | 代价大小 | 平均节点数 |
| APF-RRT* | 3.092 | 266.24 | 18.428 |
| TRH-RRT* | 1.390 | 201.66 | 16.235 |
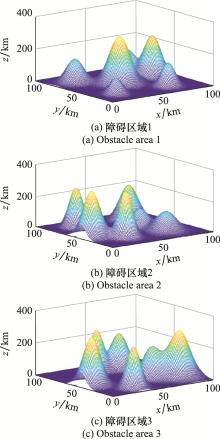
Fig.13
Examples of different obstacle areas"
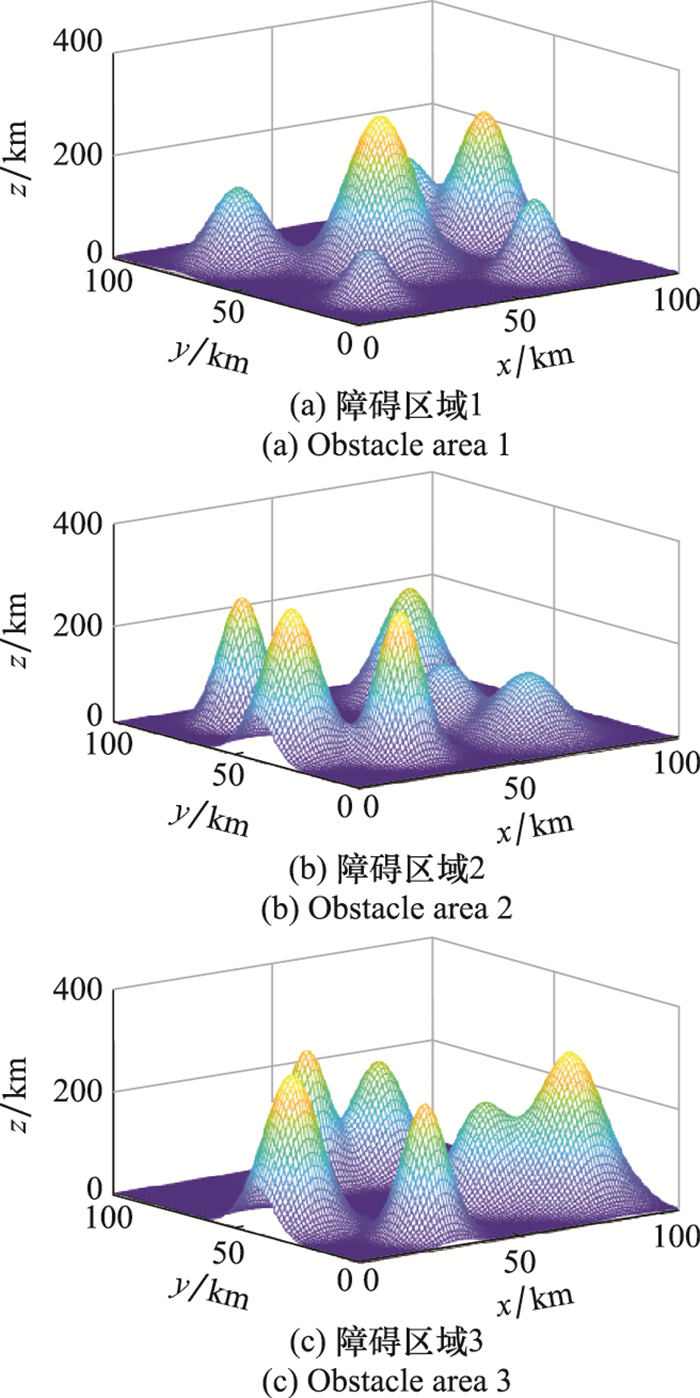
Table 2
Comparison of reliability of two methods"
| 比较指标 | APF-RRT* | TRH-RRT* |
| 平均转弯角/(°) | 24.161 | 14.300 |
| 最大转弯角/(°) | 168.594 | 41.630 |
| 最大爬升角/(°) | 0.218 8 | 0.017 5 |
| 规划时间/s | 4.088 4 | 1.455 8 |
Fig.14
Comparison diagram of turning angles"
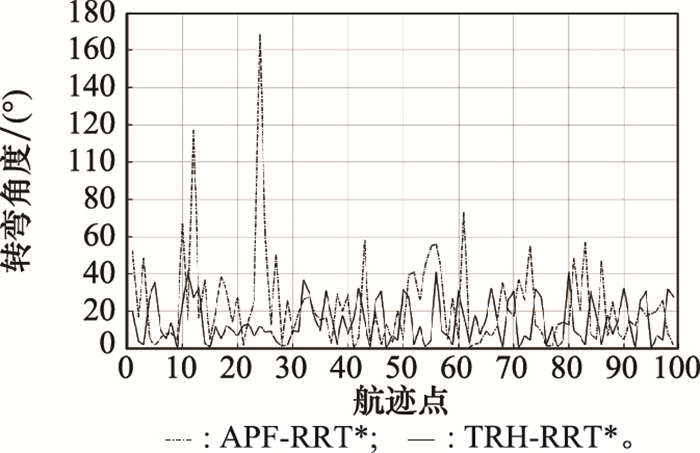
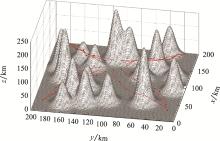
Fig.15
Candidate route set of multiple-unmanned aerial vehicles"
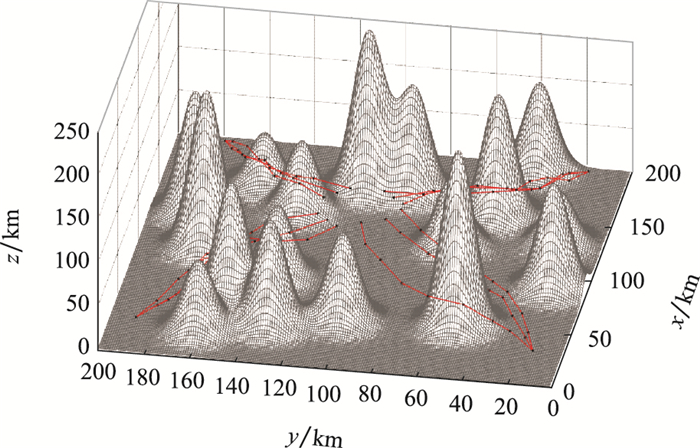
Fig.16
Curves of convergence attack synergy costs"
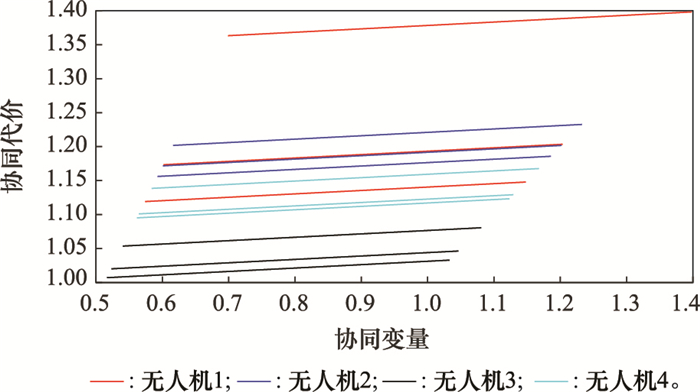

Fig.17
Cooperative route planning results of unmanned aerial vehicle cluster convergence attack"
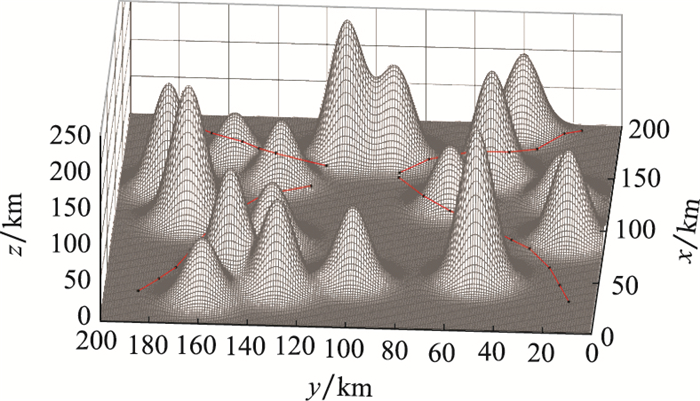
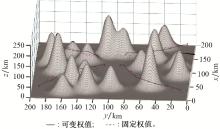
Fig.18
Simulation results of cluster convergence synergy cost before and after improvement"
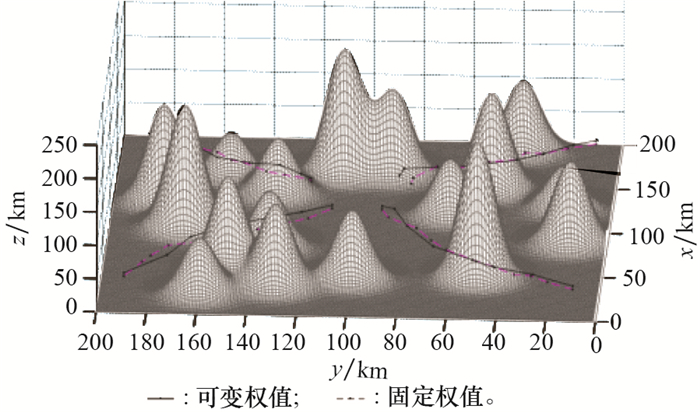
Table 3
Comparison of simulation data before and after collaborative improvement"
| 比较指标 | 规划时间/s | 平滑度 | 协同时间/h |
| 固定权值 | 1.092 6 | 707.686 6 | 0.630 25 |
| 可变权值 | 1.380 8 | 608.721 0 | 0.587 46 |
| 1 |
ZHEN Z Y , ZHU P , XUE Y X , et al. Distributed intelligent self-organized mission planning of multi-UAV for dynamic targets cooperative search-attack[J]. Chinese Journal of Aeronautics, 2019, 32 (12): 2706- 2716.
doi: 10.1016/j.cja.2019.05.012 |
| 2 |
CHEN L , WU H S . Demand analysis based on SWOT's intelligent unmanned aerial vehicle swarm[J]. Journal of Physics: Conference Series, 2021, 2037 (1): 012121- 012129.
doi: 10.1088/1742-6596/2037/1/012121 |
| 3 | ZHANG H C. Research on UAV route planning technology based on evolutionary algorithm[C]//Proc. of the International Conference on Big Data Analytics for Cyber-Physical System in Smart City, 2022: 1179-1184. |
| 4 |
SHIRI H , PARK J , BENNIS M . Remote UAV online path planning via neural network-based opportunistic control[J]. IEEE Wireless Communications Letters, 2020, 9 (6): 861- 865.
doi: 10.1109/LWC.2020.2973624 |
| 5 | INDRIYANTO T, RIZKI A R, HARIYADIN M L, et al. Centra-lized swarming UAV using ROS for collaborative missions[C]//Proc. of the 3RD International Seminar on Metallurgy and Materials: Exploring New Innovation in Metallurgy and Materials, 2020. |
| 6 | LIU H S , CHEN Q Y , NAN P , et al. Three-dimensional mountain complex terrain and heterogeneous multi-UAV cooperative combat mission planning[J]. IEEE Access, 2020, 10 (8): 197407- 197419. |
| 7 | 朱黔, 黄蓓, 许诺, 等. 面向复杂障碍环境的多机协同侦察任务规划[J]. 电光与控制, 2021, 28 (2): 43- 47. |
| ZHU Q , HUANG B , XU N , et al. Mission planning of coope-rative reconnaissance for multiple UAVs in complex environment with obstacles[J]. Electronics Optics & Control, 2021, 28 (2): 43- 47. | |
| 8 | 杨川力, 宁芊, 陈炳才, 等. 基于GAPSO-TS的多基地无人机航路-时间协同规划[J]. 火力与指挥控制, 2021, 46 (9): 20- 26. |
| YANG C L , NING Q , CHEN B C , et al. Multi-base UAVs path-time collaborative planning based on GAPSO-TS algorithm[J]. Fire Control & Command Control, 2021, 46 (9): 20- 26. | |
| 9 | SHI Z J, NG W K. A collision-free path planning algorithm for unmanned aerial vehicle delivery[C]//Proc. of the International Conference on Unmanned Aircraft Systems, 2018: 358-362. |
| 10 | XU C , XU M , YIN C J . Optimized multi-UAV cooperative path planning under the complex confrontation environment[J]. Computer Communications, 2020, 162 (15): 196- 203. |
| 11 | MOHAMMED H , ROMDHANE L , JARADAT M A . RRT* N: an efficient approach to path planning in 3D for static and dynamic environments[J]. Advanced Robotics, 2021, 35 (3/4): 168- 180. |
| 12 | MCCOURT M, TON C T, MEHTA S S, et al. Adaptive step-length RRT algorithm for improved coverage[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2016: 06380-06388. |
| 13 | LEE H , LEE D , SHIM D H . Receding horizon-based RRT* algorithm for a UAV real-time path planner[M]. Grapevine, Texas: Aircraft Industries Association of America, 2017. |
| 14 | 刘奥博, 袁杰. 目标偏置双向RRT*算法的机器人路径规划[J]. 计算机工程与应用, 2021, 58 (6): 234- 240. |
| LIU A B , YUAN J . Robot path planning based on goal biased bidirectional RRT* algorithm[J]. Computer Engineering and Applications, 2021, 58 (6): 234- 240. | |
| 15 | LIU H Y, ZHANG X B, WEN J, et al. Goal-biased bidirectional RRT based on curve-smoothing[C]//Proc. of the 5th Curve-Smoothing IFAC Symposium on Telematics Applications, 2019: 255-260. |
| 16 | 陈波芝, 陆亮, 雷新宇, 等. 基于改进快速扩展随机树算法的双机械臂协同避障规划方法[J]. 中国机械工程, 2018, 29 (10): 1220- 1226. |
| CHEN B Z , LU L , LEI X Y , et al. Simultaneous obstacle-avoidance motion planning approach for dual arm robots based on improved RRT algorithm[J]. China Mechanical Engineering, 2018, 29 (10): 1220- 1226. | |
| 17 |
KIANI F , SEYYEDABBASI A , ALIYEV R , et al. Adapted-RRT: novel hybrid method to solve three-dimensional path planning problem using sampling and metaheuristic-based algorithms[J]. Neural Computing and Applications, 2021, 33 (22): 15569- 15599.
doi: 10.1007/s00521-021-06179-0 |
| 18 | 阮晓钢, 郭威, 黄静, 等. 机器人信息增益RRT环境探索算法[J]. 控制与决策, 2021, 36 (11): 2683- 2689. |
| RUAN X G , GUO W , HUANG J , et al. Robot RRT based on information gain for environment exploration[J]. Control and Decision, 2021, 36 (11): 2683- 2689. | |
| 19 | GU M Y, HUANG Y Z. Dynamic obstacle avoidance of mobile robot based on adaptive velocity obstacle[C]//Proc. of the 36th Youth Academic Annual Conference of Chinese Association of Automation, 2021: 776-781. |
| 20 | CHEN H Y , JI Y B , NIU L J . Reinforcement learning path planning algorithm based on obstacle area expansion strategy[J]. Intelligent Service Robotics, 2020, 13 (2): 289- 297. |
| 21 | ZHANG J , LI N Z , ZHANG D Y , et al. Multi-UAV cooperative route planning based on decision variables and improved genetic algorithm[J]. Journal of Physics: Conference Series, 2021, 1941 (1): 012012- 012020. |
| 22 | WU X L , XU L , ZHEN R , et al. Bi-directional adaptive A * algorithm toward optimal path planning for large-scale UAV under multi-constraints[J]. IEEE Access, 2020, 5, 85431- 85440. |
| 23 | TANG A D , HAN T , ZHOU H , et al. An improved equili-brium optimizer with application in unmanned aerial vehicle path planning[J]. Sensors, 2021, 21 (5): 1814. |
| 24 | HUO L S , ZHU J H , LI Z M , et al. A hybrid differential symbiotic organisms search algorithm for UAV path planning[J]. Sensors, 2021, 21 (9): 3037. |
| 25 | 任天祥, 贺建良, 邹杰. 基于改进Theta*算法的直升机三维航路规划[J]. 电光与控制, 2022, 29 (2): 45- 48. |
| REN T X , HE J L , ZOU J . 3D Route planning for helicopters based on improved Theta* algorithm[J]. Electronics Optics & Control, 2022, 29 (2): 45- 48. | |
| 26 | ZHANG J , LI J W , YANG H W , et al. Complex environment path planning for unmanned aerial vehicles[J]. Sensors, 2021, 21 (15): 5250. |
| 27 | MENG L, SONG Q, ZHAO Q J, et al. Route planning for unmanned aerial vehicle based on rolling RRT in unknown environment[C]//Proc. of the IEEE International Conference on Computational Intelligence and Computing Research, 2016. |
| 28 | SANG H Q , YOU Y S , SUN X J , et al. The hybrid path planning algorithm based on improved A * and artificial potential field for unmanned surface vehicle formations[J]. Ocean Engineering, 2021, 223 (3): 108709. |
| 29 | LIU C , FENG Q C , TANG Z L , et al. Motion planning of the citrus-picking manipulator based on the TO-RRT algorithm[J]. Agriculture, 2022, 12 (5): 581- 604. |
| 30 | DEBNATH S K , OMAR R , LATIP N B A . A review on energy efficient path planning algorithms for unmanned air vehicles[M]. Computational Science and Technology.Singapore: Springer, 2019. |
| 31 | FANG J, YIN K, WANG H B, et al. Motion path planning of sorting robot based on extended RRT-connect algorithm[C]//Proc. of the 4th International Conference on Mechatronics, Robotics and Automation, 2021. |
| [1] | Mulai TAN, Dali DING, Lei XIE, Wei DING, Chenghui LYU. UCAV escape maneuvering decision based on fuzzy expert system and IDE algorithm [J]. Systems Engineering and Electronics, 2022, 44(6): 1984-1993. |
| [2] | Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance [J]. Systems Engineering and Electronics, 2022, 44(2): 529-537. |
| [3] | Tong HAN, Andi TANG, Huan ZHOU, Dengwu XU, Lei XIE. Multiple UAV cooperative path planning based on LASSA method [J]. Systems Engineering and Electronics, 2022, 44(1): 233-241. |
| [4] | Yi ZHANG, Guowei FANG, Xiuxia YANG. Target tracking method for UAVs formation based on graph Laplacian [J]. Systems Engineering and Electronics, 2021, 43(3): 796-805. |
| [5] | Yao HAN, Shaohua LI. UAV path planning based on improved artificial potential field [J]. Systems Engineering and Electronics, 2021, 43(11): 3305-3311. |
| [6] | Daidai CHEN, Wanyou LI. Local path planning algorithm for USV with towed cable [J]. Systems Engineering and Electronics, 2020, 42(9): 1988-1994. |
| [7] | ZHU Qiang, SHAO Zhijiang. Realtime receding horizon pursuit and evasion games of missile guidance based on neural network [J]. Systems Engineering and Electronics, 2019, 41(7): 1597-1605. |
| [8] | CHEN Tiande, HUANG Yanyan, ZHANG Yongliang. Non-trap dynamic path planning based on collision risk [J]. Systems Engineering and Electronics, 2019, 41(11): 2496-2506. |
| [9] | LIU Zhong, GAO Xiaoguang, FU Xiaowei. Multi-UAVs distributed cooperative target search algorithm with controllable revisit mechanism based on digital pheromone [J]. Systems Engineering and Electronics, 2017, 39(9): 1998-2011. |
| [10] | GAO Bing-bing, GAO She-sheng, HU Gao-ge, YAN Hai-feng. Adaptive UKF based on maximum likelihood principle and receding horizon estimation [J]. Systems Engineering and Electronics, 2016, 38(7): 1629-1637. |
| [11] | ZHAO Yu, ZHANG Bin, XU An, LI Hong-ke. Two-fighter cooperative tactics maneuvering game and approximate optimal solution [J]. Systems Engineering and Electronics, 2015, 37(3): 589-593. |
| [12] | HUANG Chang-qiang,LIU He-ming,HUANG Han-qiao, CHENG Hua, CHEN Shao-hua. Online UCAV attacking trajectory planning in uncertain environment [J]. Systems Engineering and Electronics, 2014, 36(8): 1558-1565. |
| [13] | WU Xu-zhong, TANG Sheng-jing, GUO Jie, XIONG Jun-hui. Trajectory tracking guidance law for reentry based on receding horizon control [J]. Systems Engineering and Electronics, 2014, 36(8): 1602-1608. |
| [14] | ZHANG Tao,YU Lei,ZHOU Zhong-liang,WANG Lin. Decision-making for air combat maneuvering based on hybrid algorithm [J]. Journal of Systems Engineering and Electronics, 2013, 35(7): 1445-1450. |
| [15] | LUO De-lin,WU Shun-xiang. Ant colony optimization with potential field heuristic for robot path planning [J]. Journal of Systems Engineering and Electronics, 2010, 32(6): 1277-1280. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||