
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (5): 1476-1488.doi: 10.12305/j.issn.1001-506X.2023.05.24
• 制导、导航与控制 • 上一篇
董泽洪1,2, 李颖晖1, 吕茂隆3, 李哲1, 裴彬彬1,*
收稿日期:2022-01-05
出版日期:2023-04-21
发布日期:2023-04-28
通讯作者:
裴彬彬
作者简介:董泽洪 (1995—), 男, 博士研究生, 主要研究方向为高超声速飞行器自适应控制、智能控制Zehong DONG1,2, Yinghui LI1, Maolong LYU3, Zhe LI1, Binbin PEI1,*
Received:2022-01-05
Online:2023-04-21
Published:2023-04-28
Contact:
Binbin PEI
摘要:
考虑了高超声速飞行器输入饱和、气动参数不确定性以及跟踪误差收敛速率慢等问题, 设计了一种抗输入饱和非奇异固定时间自适应切换控制策略。首先将高超声速飞行器纵向动力学模型分解为速度子系统和高度子系统, 然后分别设计非奇异固定时间跟踪控制器。为解决传统固定时间控制器中存在的奇异值问题, 设计了一种新的可微切换函数, 该函数以跟踪误差为判定量对控制律进行切换, 保证了虚拟控制律的可微性以及反步设计的可行性。针对高超声速飞行器的输入饱和问题, 设计了一种固定时间辅助误差补偿系统, 将补偿信号的误差收敛速度由指数收敛提高到固定时间收敛。而后, 利用Lyapunov定理证明了速度跟踪误差和高度跟踪误差以及逼近器的估计误差在固定时间内收敛至原点的任意小邻域内。最后, 通过仿真验证了所提控制器的有效性及优越性。
中图分类号:
董泽洪, 李颖晖, 吕茂隆, 李哲, 裴彬彬. 考虑输入受限的高超声速飞行器非奇异固定时间自适应切换控制[J]. 系统工程与电子技术, 2023, 45(5): 1476-1488.
Zehong DONG, Yinghui LI, Maolong LYU, Zhe LI, Binbin PEI. Singularity-free fixed-time adaptive switching control for hypersonic flight vehicle with input constraints[J]. Systems Engineering and Electronics, 2023, 45(5): 1476-1488.

图1
抗饱和固定时间反步自适应控制器结构框图"
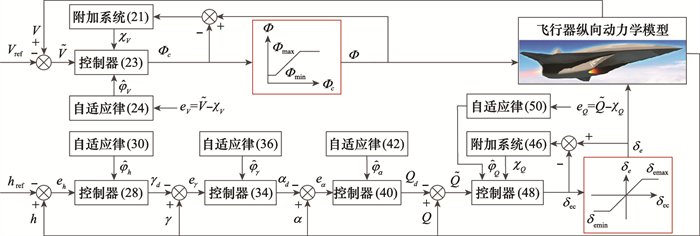
表1
HFV的初始状态"
| 状态变量 | 初始值 |
| V/(ft/s) | 7 700 |
| h/ft | 85 000 |
| γ/(°) | 0 |
| θ/(°) | 1.632 5 |
| Q/(°/s) | 0 |
| 0.97 | |
| 0 | |
| 0.796 7 | |
| 0 |
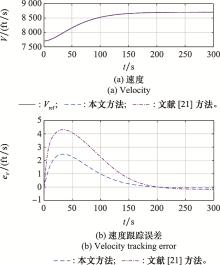
图2
速度跟踪性能(情形1)"

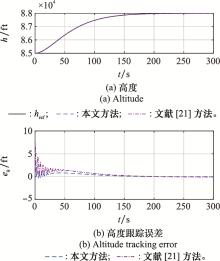
图3
高度跟踪性能(情形1)"
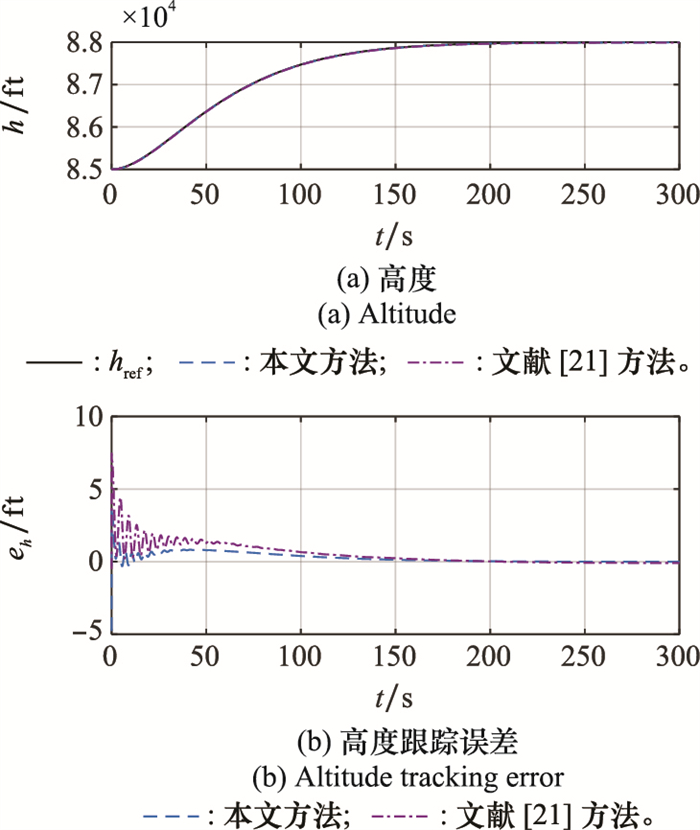

图4
姿态角(情形1)"
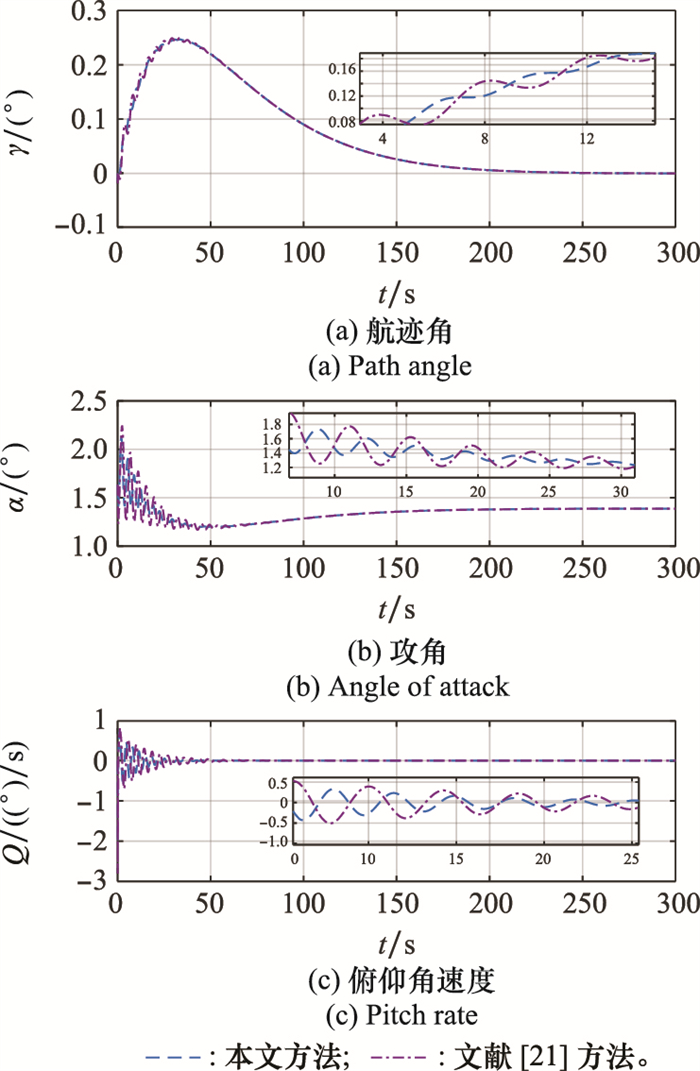
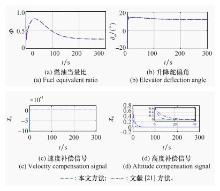
图5
控制输入和补偿信号(情形1)"
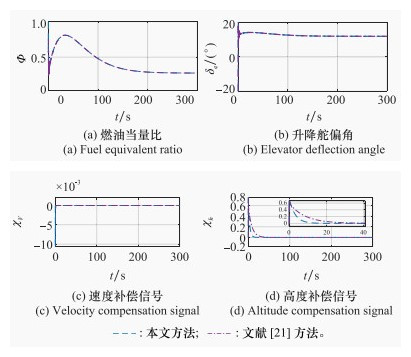
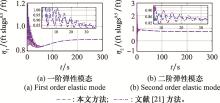
图6
弹性状态(情形1)"

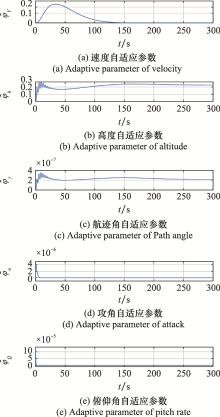
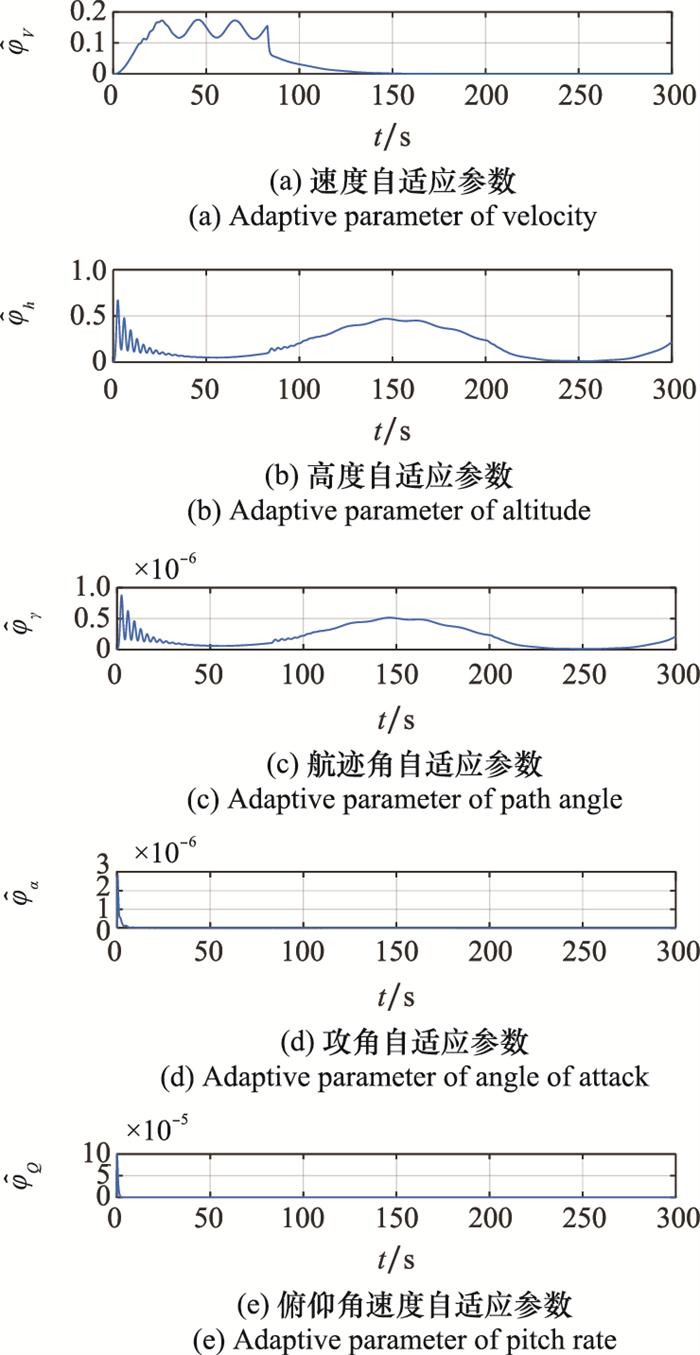
图7
自适应参数(情形1)"
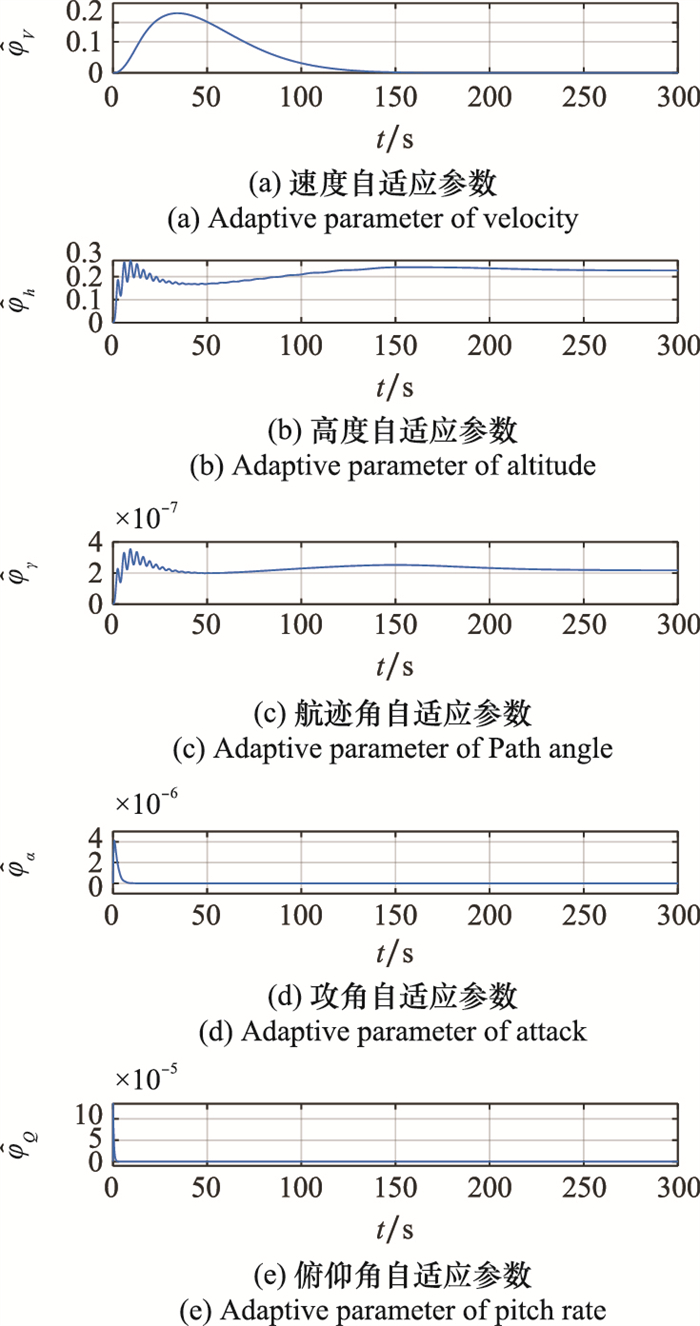
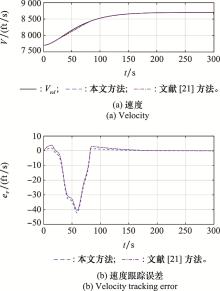
图8
速度跟踪性能(情形2)"
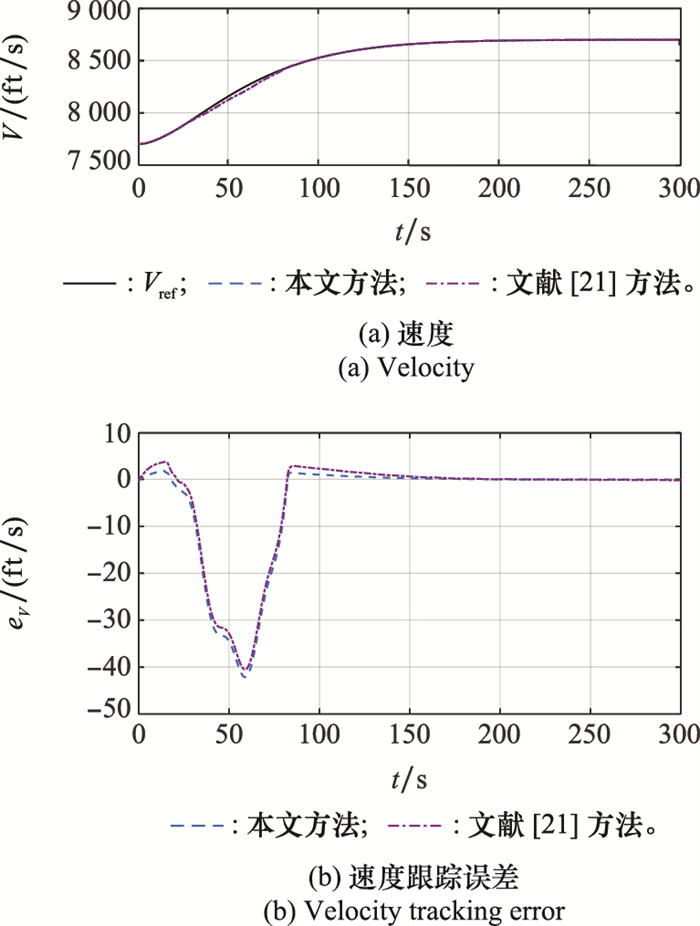

图9
高度跟踪性能(情形2)"

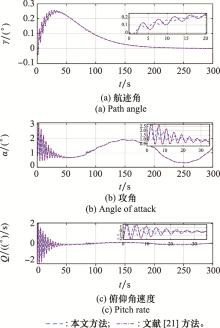
图10
姿态角(情形2)"
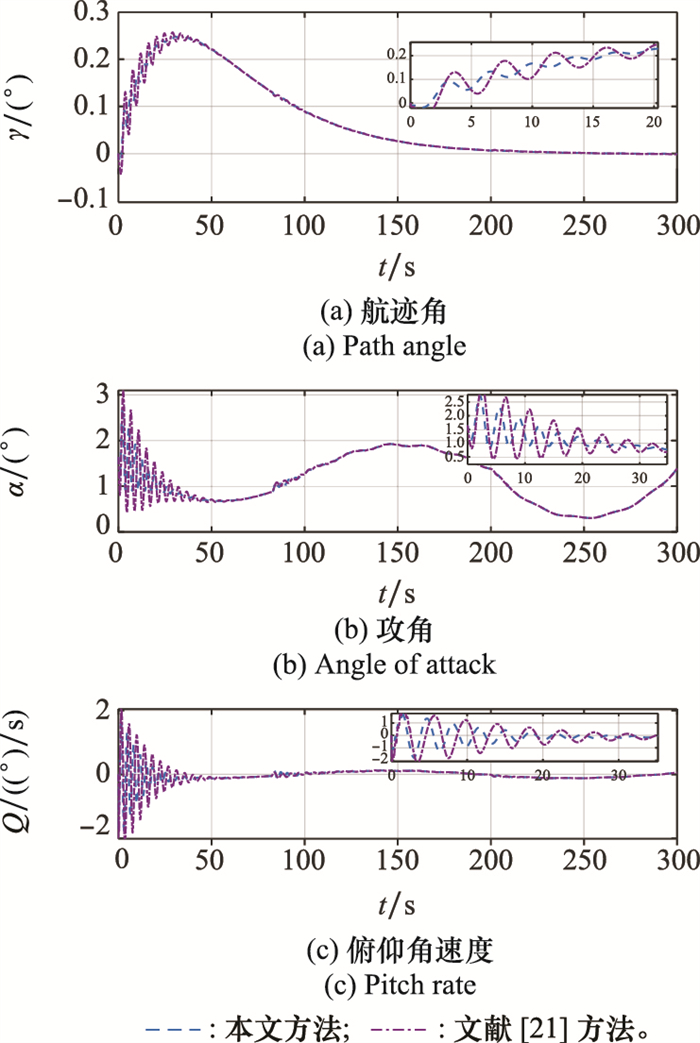
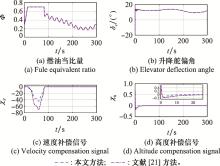
图11
控制输入和补偿信号(情形2)"

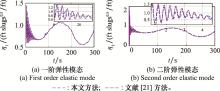
图12
弹性状态(情形2)"
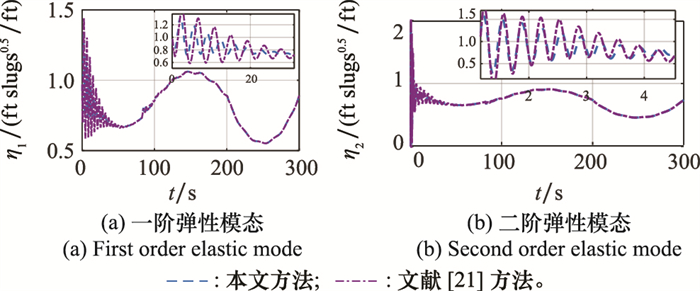
图13
自适应参数(情形2)"
| 1 |
DONG Z H , LI Y H , LYU M L , et al. Adaptive accurate tracking control of HFVs in the presence of dead-zone and hysteresis input nonlinearities[J]. Chinese Journal of Aeronautics, 2021, 34 (5): 642- 651.
doi: 10.1016/j.cja.2020.10.028 |
| 2 |
PARKER J T , SERRANI A , YURKOVICH S , et al. Control-oriented modeling of an air-breathing hypersonic vehicle[J]. Journal of Guidance Control and Dynamics, 2007, 30 (3): 856- 869.
doi: 10.2514/1.27830 |
| 3 | 岳彩红, 唐胜景, 郭杰, 等. 高超声速伸缩式变形飞行器再入轨迹快速优化[J]. 系统工程与电子技术, 2021, 43 (8): 2232- 2243. |
| YUE C H , TANG S J , GUO J , et al. Reentry trajectory rapid optimization for hypersonic telescopic deformable vehicle[J]. Systems Engineering and Electronics, 2021, 43 (8): 2232- 2243. | |
| 4 | 郭建国, 苏亚鲁. 高超飞行器自适应动态规划的控制系统设计[J]. 系统工程与电子技术, 2021, 43 (6): 1628- 1635. |
| GUO J G , SU Y L . Control system design of adaptive dynamic programming for hypersonic vehicle[J]. Systems Engineering and Electronics, 2021, 43 (6): 1628- 1635. | |
| 5 |
ZHAO H W , LI R . Typical adaptive neural control for hypersonic vehicle based on higher-order filters[J]. Journal of Systems Engineering and Electronics, 2020, 31 (5): 1031- 1040.
doi: 10.23919/JSEE.2020.000077 |
| 6 | 晁涛, 王雨潇, 王松艳, 等. 考虑非最小相位特性的高超声速飞行器轨迹跟踪控制[J]. 系统工程与电子技术, 2018, 40 (7): 1548- 1553. |
| CHAO T , WANG Y X , WANG S Y , et al. Trajectory tracking control for non-minimum phase hypersonic vehicles[J]. Systems Engineering and Electronics, 2018, 40 (7): 1548- 1553. | |
| 7 |
XU B , WANG X , SHI Z K . Robust adaptive neural control of nonminimum phase hypersonic vehicle model[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2021, 51 (2): 1107- 1115.
doi: 10.1109/TSMC.2019.2894916 |
| 8 |
BU X W , LEI H M , GAO Y P . Robust tracking control of hypersonic flight vehicles: a continuous model-free control app-roach[J]. Acta Astronautica, 2019, 161, 234- 240.
doi: 10.1016/j.actaastro.2019.05.039 |
| 9 | LI Z Y , ZHOU W J , LIU H . Robust controller design of non-minimum phase hypersonic aircrafts model based on quantitative feedback theory[J]. Journal of the Astronautical Sciences, 2019, 67, 137- 163. |
| 10 | HE X , JIANG W , JIANG C S . Robust controller designing for an air-breathing hypersonic vehicle with an HOSVD-based LPV model[J]. International Journal of Aerospace Engineering, 2021, 2021, 7570059. |
| 11 |
LIANG S , XU B , REN J R . Kalman-filter-based robust control for hypersonic flight vehicle with measurement noises[J]. Aerospace Science and Technology, 2021, 112, 106566.
doi: 10.1016/j.ast.2021.106566 |
| 12 |
SHENG Y Z , BAI W J , XIE Y W . Fractional-order PIλD sliding mode control for hypersonic vehicles with neural network disturbance compensator[J]. Nonlinear Dynamics, 2021, 103 (1): 849- 863.
doi: 10.1007/s11071-020-06046-y |
| 13 |
SHOU Y X , XU B , LIANG X H , et al. Aerodynamic/reaction-jet compound control of hypersonic reentry vehicle using sliding mode control and neural learning[J]. Aerospace Science and Technology, 2021, 111, 106564.
doi: 10.1016/j.ast.2021.106564 |
| 14 |
ZHANG X F , HU W J , WEI C S , et al. Nonlinear disturbance observer based adaptive super-twisting sliding mode control for generic hypersonic vehicles with coupled multisource distur-bances[J]. European Journal of Control, 2021, 57, 253- 262.
doi: 10.1016/j.ejcon.2020.06.001 |
| 15 | 王肖, 郭杰, 唐胜景, 等. 吸气式高超声速飞行器鲁棒非奇异Terminal滑模反步控制[J]. 航空学报, 2017, 38 (3): 194- 206. |
| WANG X , GUO J , TANG S J , et al. Robust nonsingular terminal sliding mode backstepping control for air-breathing hypersonic vehicles[J]. Astronautica Sinica, 2017, 38 (3): 194- 206. | |
| 16 | BASIN M V , YU P , SHTESSEL Y B . Hypersonic missile adaptive sliding mode control using finite-and fixed-time obser-vers[J]. IEEE Trans.on Industrial Electronics, 2017, 65 (1): 930- 941. |
| 17 |
HU Q L , MENG Y . Adaptive backstepping control for air-breathing hypersonic vehicle with actuator dynamics[J]. Aerospace Science and Technology, 2017, 67, 412- 421.
doi: 10.1016/j.ast.2017.04.022 |
| 18 | 赵贺伟, 梁勇, 杨秀霞. 弹性高超声速飞行器抗输入饱和动态神经网络控制[J]. 系统工程与电子技术, 2017, 39 (4): 854- 865. |
| ZHAO H W , LIANG Y , YANG X X . Anti-input windup dynamic neural networks control for flexible hypersonic vehicles[J]. System Engineering and Electronics, 2017, 39 (4): 854- 865. | |
| 19 |
PENG Z H , WANG J . Output-feedback path-following control of autonomous underwater vehicles based on an extended state observer and projection neural networks[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2018, 48 (4): 535- 544.
doi: 10.1109/TSMC.2017.2697447 |
| 20 |
DONG Z H , LI Y H , XU H J , et al. Fixed-time neural control for hypersonic flight vehicles with asymmetric time-varying constraints[J]. Journal of Physics: Conference Series, 2021, 1966 (1): 012050.
doi: 10.1088/1742-6596/1966/1/012050 |
| 21 |
BU X W , WU X Y , MA Z , et al. Novel auxiliary error compensation design for the adaptive neural control of a constrained flexible air-breathing hypersonic vehicle[J]. Neurocomputing, 2016, 171, 313- 324.
doi: 10.1016/j.neucom.2015.06.058 |
| 22 |
LIU C , DONG C Y , ZHOU Z J , et al. Barrier Lyapunov function based reinforcement learning control for air-breathing hypersonic vehicle with variable geometry inlet[J]. Aerospace Science and Technology, 2020, 96, 105537.
doi: 10.1016/j.ast.2019.105537 |
| 23 |
HAN X , ZHENG Z Z , LIU L , et al. Online policy iteration ADP-based attitude-tracking control for hypersonic vehicles[J]. Aerospace Science and Technology, 2020, 106, 106233.
doi: 10.1016/j.ast.2020.106233 |
| 24 | WANG G, AN H, GUO Z Y, et al. Deep reinforcement learning-based backstepping control of air-breathing hypersonic vehicles with actuator constraints[C]//Proc. of the 40th Chinese Control Conference, 2021: 7599-7603. |
| 25 |
MU C X , NI Z , SUN C Y , et al. Air-breathing hypersonic vehicle tracking control based on adaptive dynamic programming[J]. IEEE Trans.on Neural Networks and Learning Systems, 2017, 28 (3): 584- 598.
doi: 10.1109/TNNLS.2016.2516948 |
| 26 |
SUN J L , YI J Q , PU Z Q , et al. Adaptive fuzzy nonsmooth backstepping output-feedback control for hypersonic vehicles with finite-time convergence[J]. IEEE Trans.on Fuzzy Systems, 2020, 28 (10): 2320- 2334.
doi: 10.1109/TFUZZ.2019.2934934 |
| 27 | TANG X N , ZHAI D , LI X J . Adaptive fault-tolerance control based finite-time backstepping for hypersonic flight vehicle with full state constrains[J]. Information Sciences, 2019, 507, 53- 66. |
| 28 | WANG X , GUO J , TANG S J , et al. Fixed-time disturbance observer based fixed-time backstepping control for an air-breathing hypersonic vehicle[J]. ISA Transactions, 2018, 88, 233- 245. |
| 29 |
DING Y B , WANG X G , BAI Y L , et al. Robust fixed-time sliding mode controller for flexible air-breathing hypersonic vehicle[J]. ISA Transactions, 2019, 90, 1- 18.
doi: 10.1016/j.isatra.2018.12.043 |
| 30 |
YU X , LI P , ZHANG Y M . The design of fixed-time observer and finite-time fault-tolerant control for hypersonic gliding vehicles[J]. IEEE Trans.on Industrial Electronics, 2018, 65 (5): 4135- 4144.
doi: 10.1109/TIE.2017.2772192 |
| 31 |
FARRELL J , POLYCARPOU M M , SHARMA M . Backstepping-based flight control with adaptive function approximatio n[J]. Journal of Guidance Contro l and Dynamics, 2005, 28 (6): 1089- 1102.
doi: 10.2514/1.13030 |
| 32 | 骆长鑫, 张东洋, 雷虎民, 等. 输入受限的高超声速飞行器鲁棒反演控制[J]. 航空学报, 2018, 39 (4): 213- 225. |
| LUO C X , ZHANG D Y , LEI H M , et al. Robust backstepping control of input-constrained hypersonic vehicle[J]. Astronautica Sinica, 2018, 39 (4): 213- 225. | |
| 33 | 刘晓东, 黄万伟, 禹春梅. 含扩张状态观测器的高超声速飞行器动态面姿态控制[J]. 宇航学报, 2015, 36 (8): 916- 922. |
| LIU X D , HUANG W W , YU C M . Dynamic surface attitude control for hypersonic vehicle containing extended state obser-ver[J]. Journal of Astronautics, 2015, 36 (8): 916- 922. | |
| 34 |
ZHANG X Y , ZONG Q , DOU L Q , et al. Improved finite-time command filtered backstepping fault-tolerant control for flexible hypersonic vehicle[J]. Journal of the Franklin Insti-tute, 2020, 357 (13): 8543- 8565.
doi: 10.1016/j.jfranklin.2020.05.017 |
| 35 |
XU B , SHOU Y X , LUO J , et al. Neural learning control of strict-feedback systems using disturbance observer[J]. IEEE Trans.on Neural Networks and Learning Systems, 2019, 30 (5): 1296- 1307.
doi: 10.1109/TNNLS.2018.2862907 |
| 36 |
SUN J L , YI J Q , PU Z Q , et al. Fixed-time sliding mode disturbance observer-based nonsmooth backstepping control for hypersonic vehicles[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2020, 50 (11): 4377- 4386.
doi: 10.1109/TSMC.2018.2847706 |
| 37 | BA D S , LI Y X , TONG S C . Fixed-time adaptive neural tracking control for a class of uncertain nonstrict nonlinear systems[J]. Neurocomputing, 2019, 363 (21): 273- 280. |
| 38 | YANG H J , YE D . Adaptive fixed-time bipartite tracking consensus control for unknown nonlinear multi-agent systems: an information classification mechanism[J]. Information Sciences, 2018, 459, 238- 254. |
| 39 | NI J K , WU Z H , LIU L , et al. Fixed-time adaptive neural network control for nonstrict-feedback nonlinear systems with deadzone and output constraint[J]. ISA Transactions, 2019, 97, 458- 473. |
| [1] | 梁乐成, 赵斌, 周军, 赵万利. 部分约束下空中目标拦截制导控制一体化方法[J]. 系统工程与电子技术, 2023, 45(4): 1134-1143. |
| [2] | 沈子涵, 赵修斌, 张闯, 张良, 刘鑫贤. 基于长短期记忆神经网络的自适应容错方法[J]. 系统工程与电子技术, 2023, 45(3): 831-838. |
| [3] | 汪锐, 张天骐, 安泽亮, 王雪怡, 方竹. 基于联合特征参数和一维CNN的MIMO-OFDM系统调制识别算法[J]. 系统工程与电子技术, 2023, 45(3): 902-912. |
| [4] | 闫啸家, 梁伟阁, 张钢, 佘博, 田福庆. 基于RCNN-ABiLSTM的机械设备剩余寿命预测方法[J]. 系统工程与电子技术, 2023, 45(3): 931-940. |
| [5] | 吴诗辉, 周宇, 李正欣, 刘晓东, 贺波. 基于神经网络的时变参数系统仿真优化方法[J]. 系统工程与电子技术, 2023, 45(2): 472-480. |
| [6] | 宋波涛, 许广亮. 基于LSTM与1DCNN的导弹轨迹预测方法[J]. 系统工程与电子技术, 2023, 45(2): 504-512. |
| [7] | 崔正达, 魏明英, 李运迁. 考虑阻力系数时变的下压段半解析时间预测方法[J]. 系统工程与电子技术, 2023, 45(2): 530-537. |
| [8] | 杨秀霞, 姜子劼, 张毅, 王聪. 针对机动目标的三维实时滚动优化制导策略[J]. 系统工程与电子技术, 2023, 45(2): 546-558. |
| [9] | 罗宇航, 陈彦锡, 郭琨毅, 盛新庆, 马静. 基于神经网络和散射中心模型的目标参数提取[J]. 系统工程与电子技术, 2023, 45(1): 9-14. |
| [10] | 宋爽, 张悦, 张琳娜, 岑翼刚, 李浥东. 基于深度学习的轻量化目标检测算法[J]. 系统工程与电子技术, 2022, 44(9): 2716-2725. |
| [11] | 聂倩, 杨丽花, 呼博, 任露露. 基扩展模型下基于LSTM神经网络的时变信道预测方法[J]. 系统工程与电子技术, 2022, 44(9): 2971-2977. |
| [12] | 王健, 何自豪, 刘洁, 杨珂. 基于梯度域导向滤波器和改进PCNN的图像融合算法[J]. 系统工程与电子技术, 2022, 44(8): 2381-2392. |
| [13] | 王彩云, 吴钇达, 王佳宁, 马璐, 赵焕玥. 基于改进的CNN和数据增强的SAR目标识别[J]. 系统工程与电子技术, 2022, 44(8): 2483-2487. |
| [14] | 王冠, 茹海忠, 张大力, 马广程, 夏红伟. 弹性高超声速飞行器智能控制系统设计[J]. 系统工程与电子技术, 2022, 44(7): 2276-2285. |
| [15] | 樊成, 王布宏, 田继伟. 基于多任务学习图卷积模型的航空网络节点分类[J]. 系统工程与电子技术, 2022, 44(7): 2341-2349. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||