
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (1): 172-184.doi: 10.12305/j.issn.1001-506X.2026.01.16
徐奇琛( ), 张朝辉, 李靖
), 张朝辉, 李靖
收稿日期:2024-06-11
出版日期:2026-01-25
发布日期:2026-02-11
通讯作者:
张朝辉
E-mail:qcxu0220@163.com
作者简介:徐奇琛(2001—),男,硕士研究生,主要研究方向为无人机航迹规划基金资助:
Qichen XU(), Zhaohui ZHANG, Jing LI
Received:2024-06-11
Online:2026-01-25
Published:2026-02-11
Contact:
Zhaohui ZHANG
E-mail:qcxu0220@163.com
摘要:
针对无人机(unmanned aerial vehicle, UAV)集群在未知环境下的航迹规划问题,考虑通信拒止环境下UAV无法使用全局定位系统等通信手段的场景,提出一种面向未知拒止环境的分布式自适应多无人机协同航迹规划方法。 在UAV集群航迹规划的过程中结合导航模块以及避障模块并采用自适应目标导向策略(adaptive destination-oriented strategy, ADOS),通过建立评价体系来保证集群速度在整体运行时的一致性、避免机间碰撞,进而建立适应度函数并使用麻雀搜索算法构建分布式的优化框架,最终通过最大化适应度函数值确定导航模块和避障模块的最优参数完成整个航迹规划的优化过程。 此外,在避障模块中,引入了“UAV视线”的概念,并基于此提出一种高效的避障方法,该策略通过将多条视线作为备选避障方向提高集群航迹规划的效率。 最后, 通过在构建的不同测试平台中进行避障飞行仿真实验并与现有的算法进行性能对比,验证所提算法的有效性。
中图分类号:
徐奇琛, 张朝辉, 李靖. 面向未知拒止环境的分布式自适应多无人机协同航迹规划[J]. 系统工程与电子技术, 2026, 48(1): 172-184.
Qichen XU, Zhaohui ZHANG, Jing LI. Distributed adaptive multi-UAV collaborative path planning in unknown denial environments[J]. Systems Engineering and Electronics, 2026, 48(1): 172-184.

图1
系统架构图"
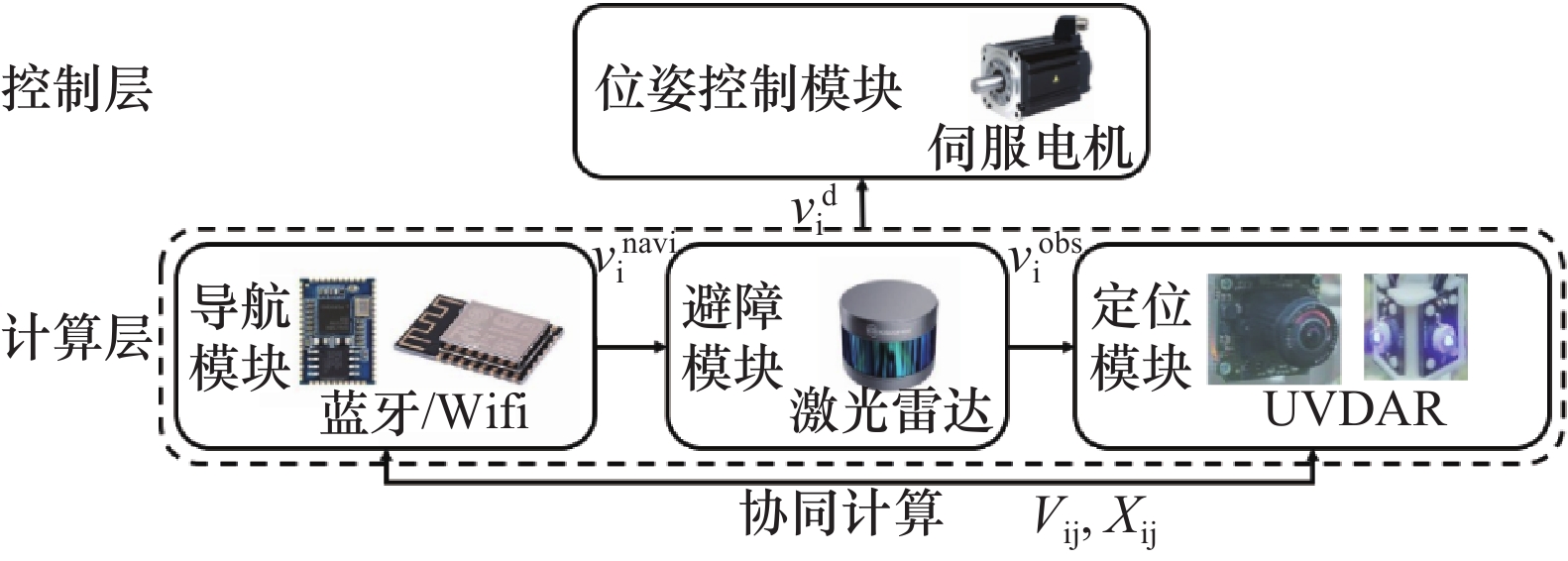
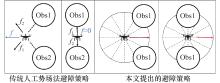
图2
避障策略效果差异"
图3
$t$时刻视线遮蔽示意图"
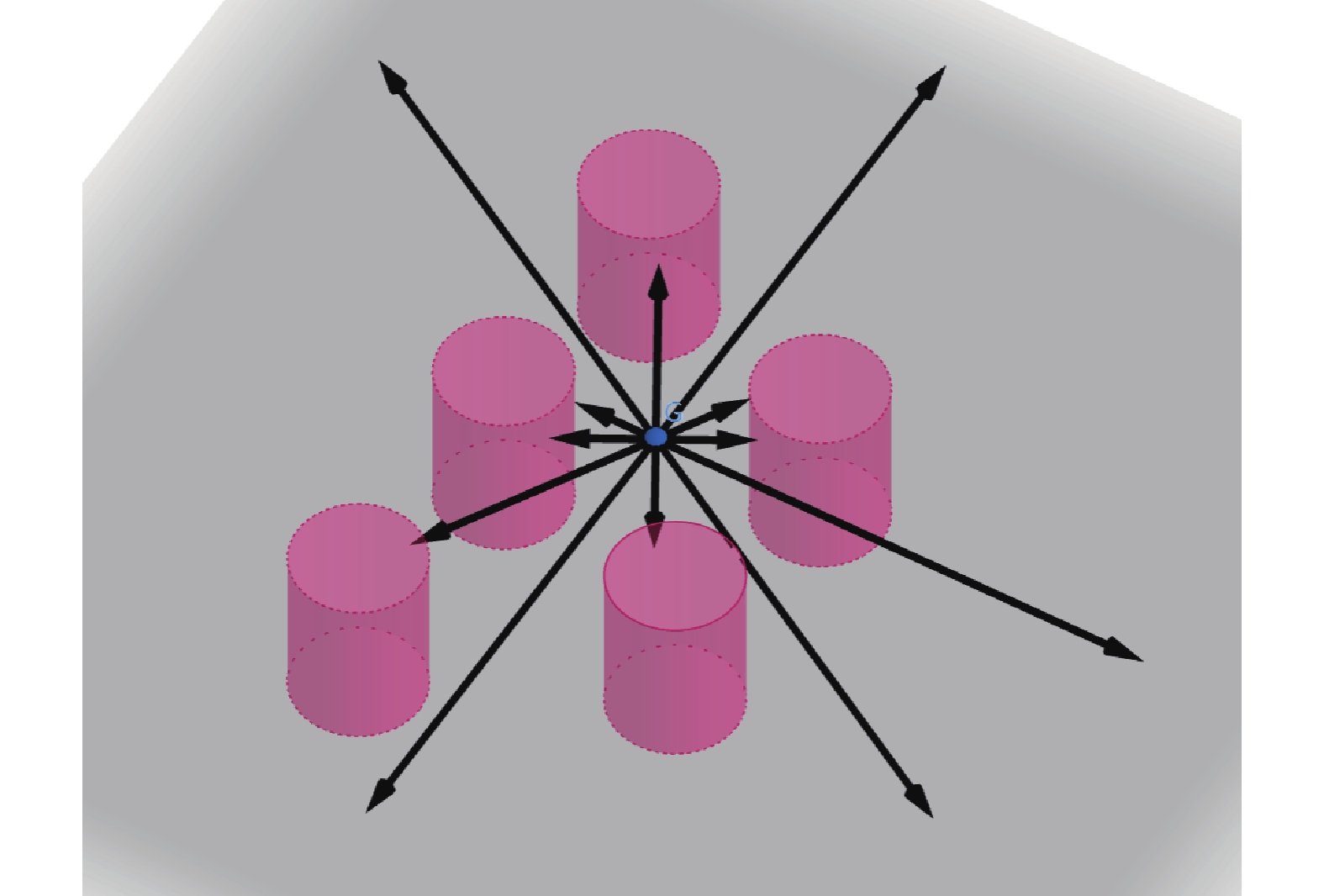
图4
UAV视线与障碍物接触示意图"
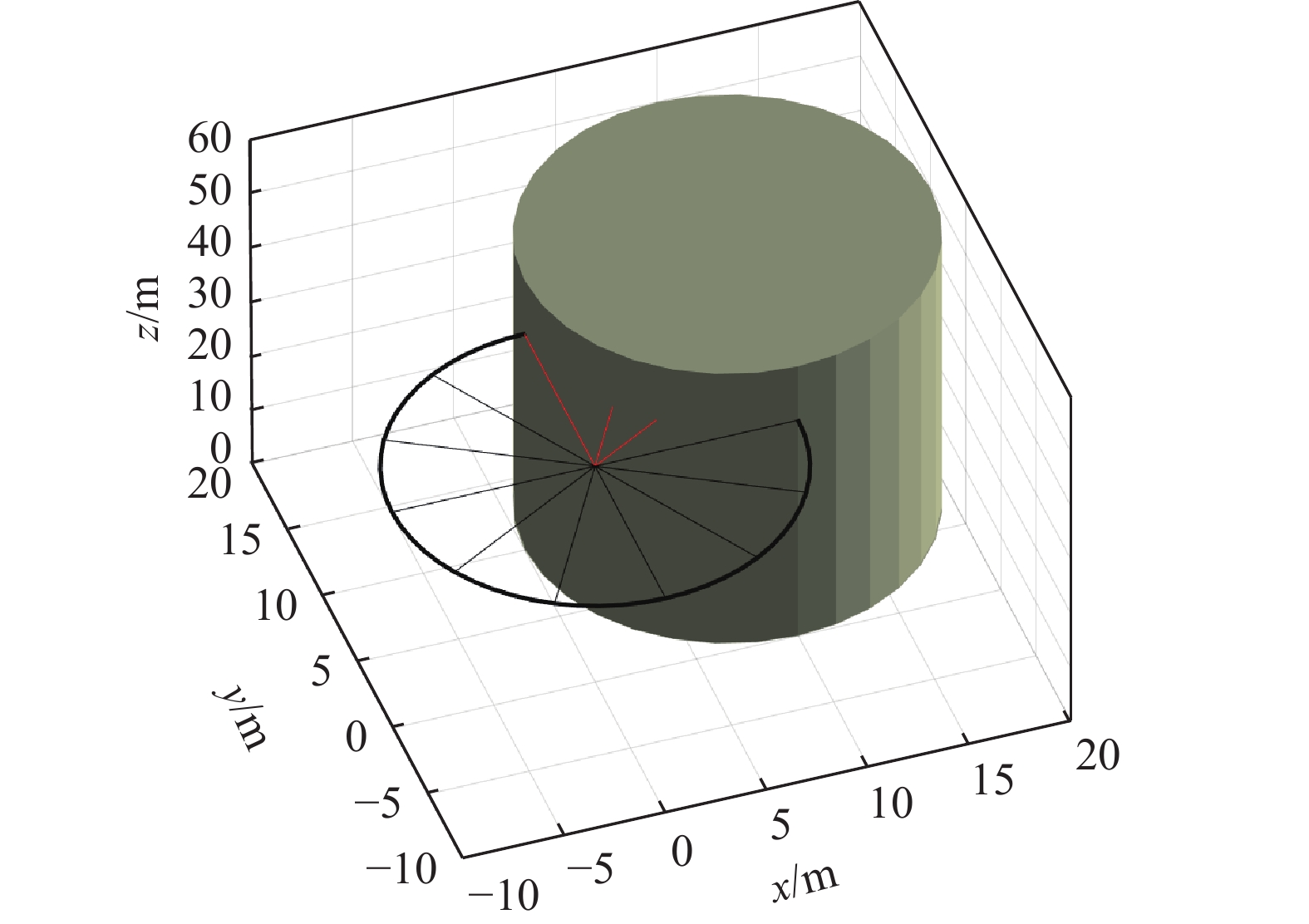
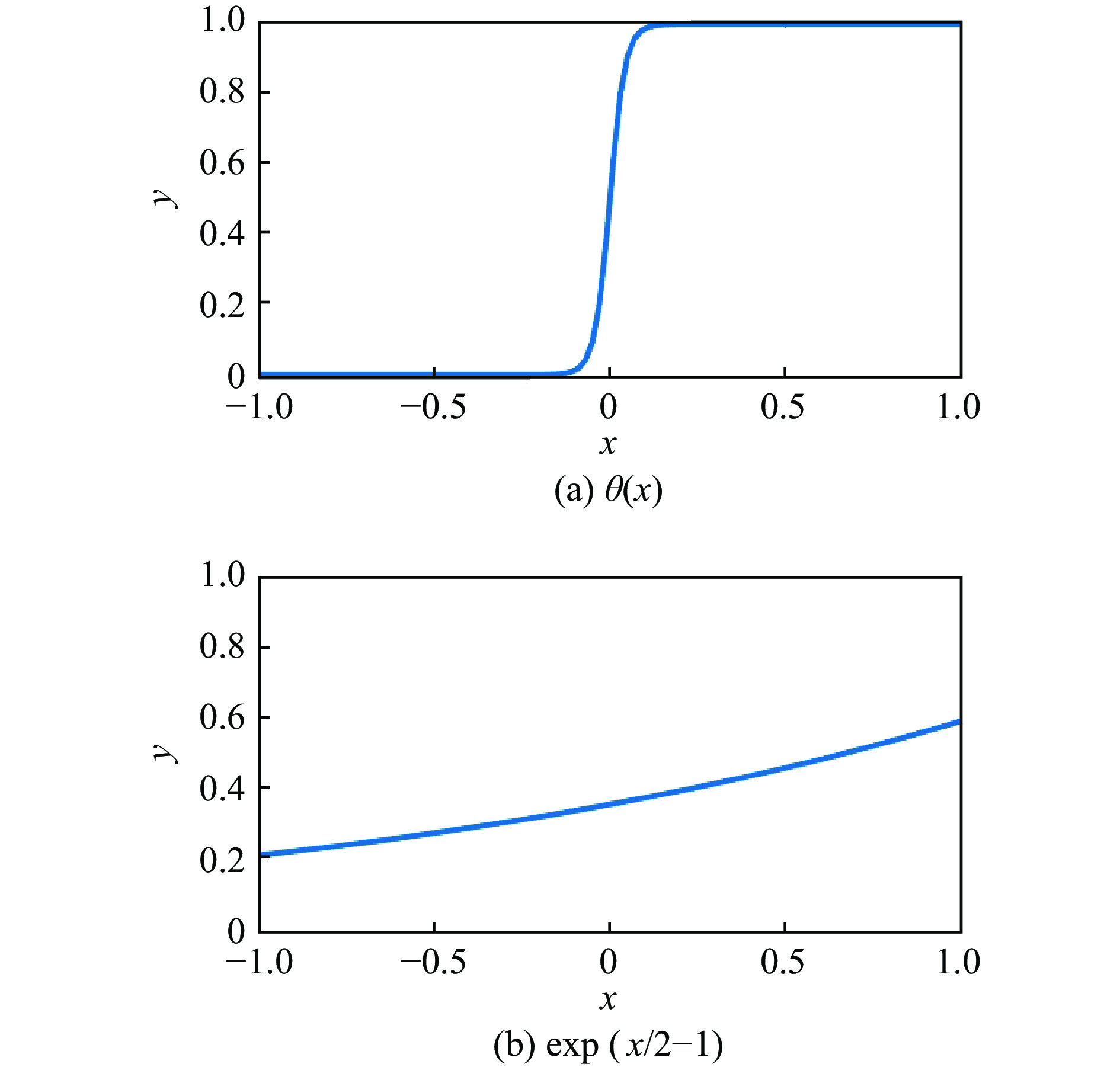
图5
归一化函数图像"
表1
某时刻各视线评分情况"
| 编号 | k | |||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| F_dire | 0.578 | 0.383 | ||||||||||
| F_dist | 0.65 | |||||||||||
| F | ||||||||||||
| 单位方向 | 40.00 | 6.25 | 3.89 | 0.00 | −8.11 | −34.64 | −6.70 | −6.57 | −9.95 | 0.00 | 5.03 | 34.64 |
| 0.00 | 3.61 | 6.74 | 40.00 | 14.05 | 20.00 | 0.00 | −3.79 | −17.23 | −40.00 | −8.71 | −20.00 | |
| 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
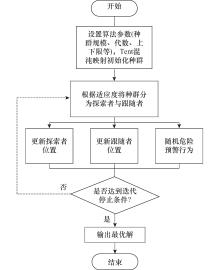
图6
基于SSA的优化流程图"
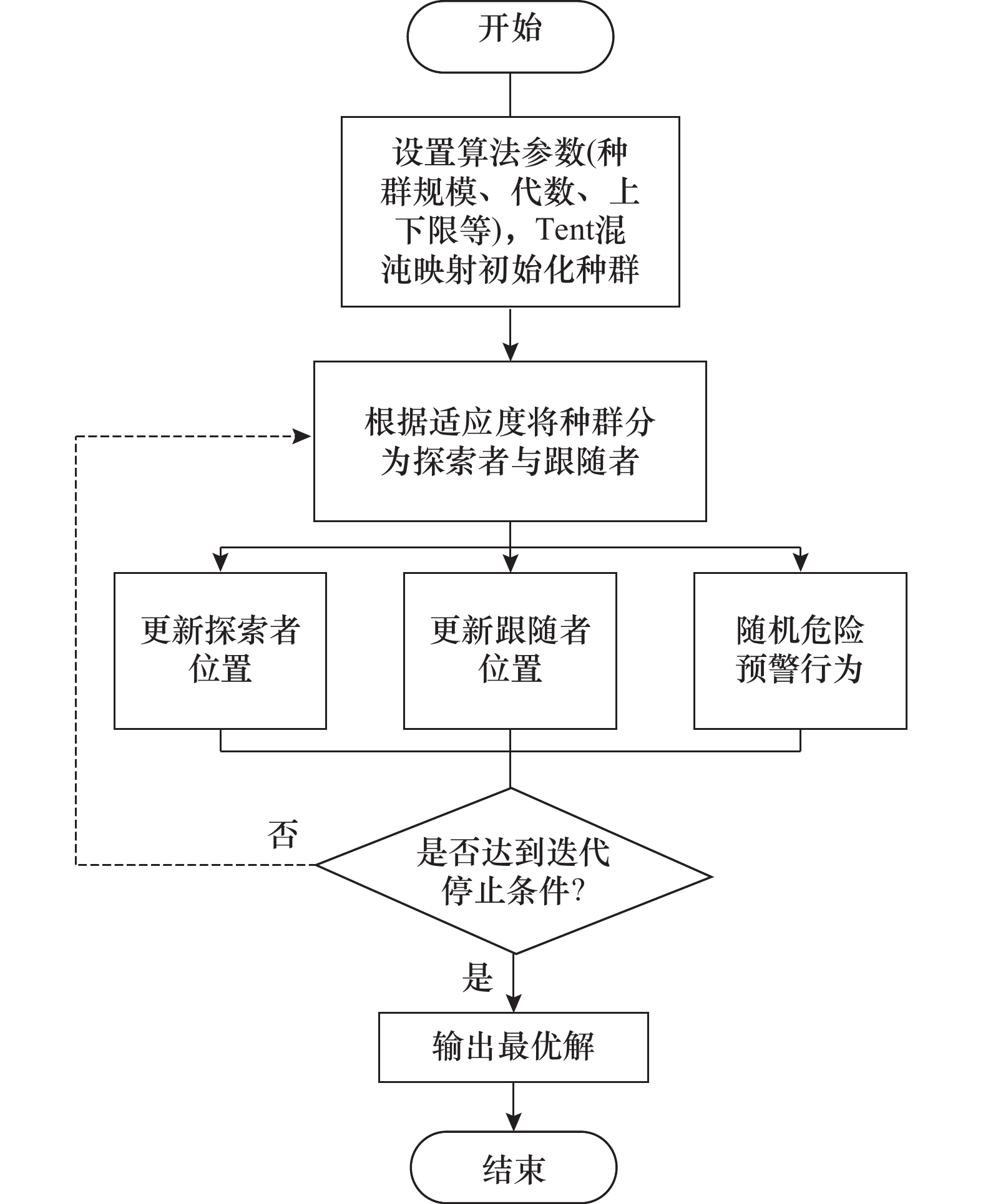
表2
各指标性质"
| 参数 | 参数范围 | 最优点 |
| 1 | ||
| 1 | ||
| 0 | ||
| 0 | ||
| 1 |

图7
$t$时刻各UAV位置"
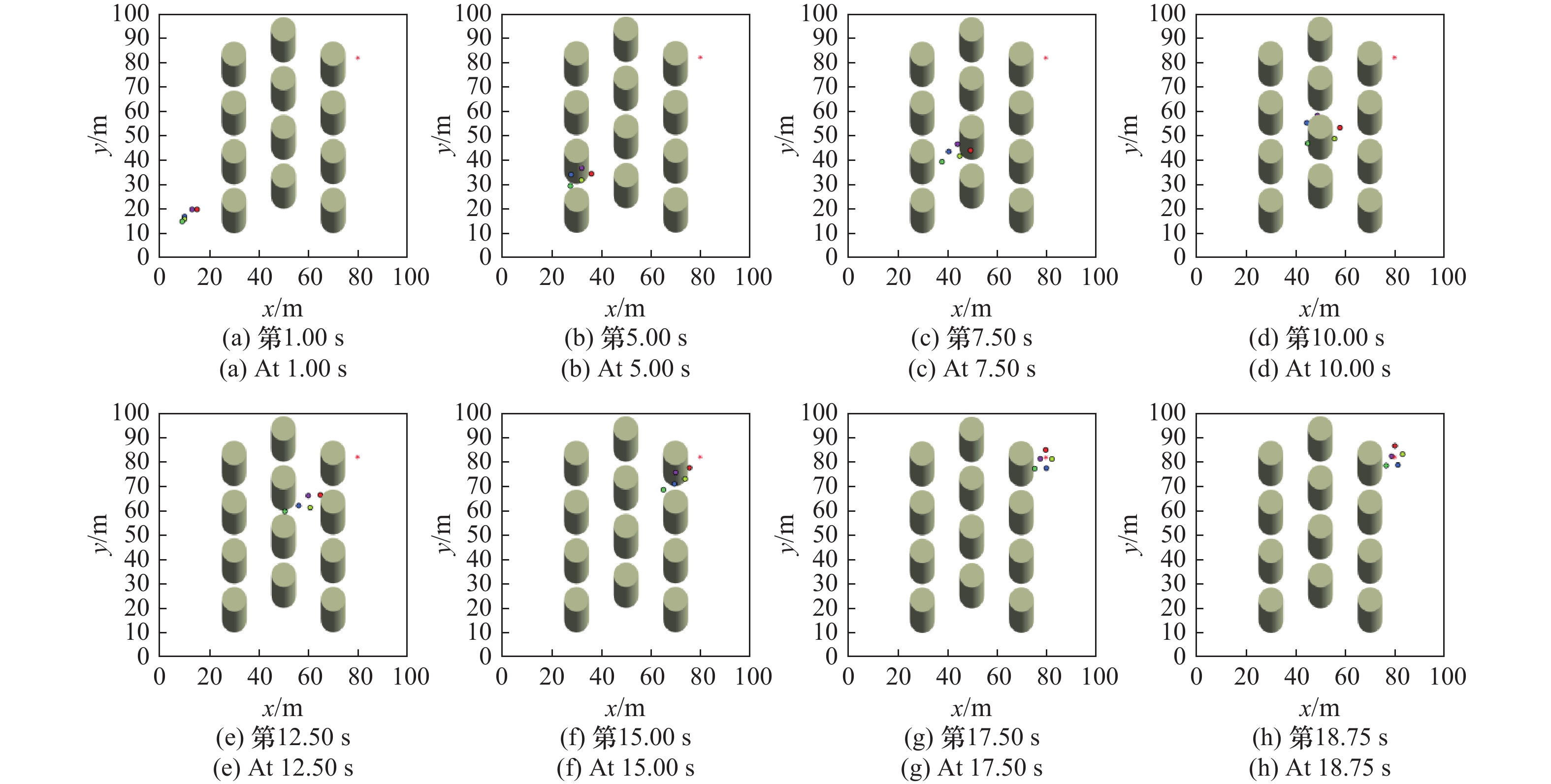
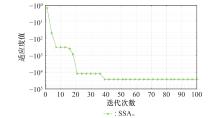
图8
适应度下降曲线图"

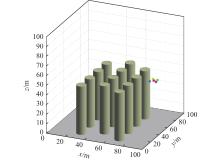
图9
避障场景1"
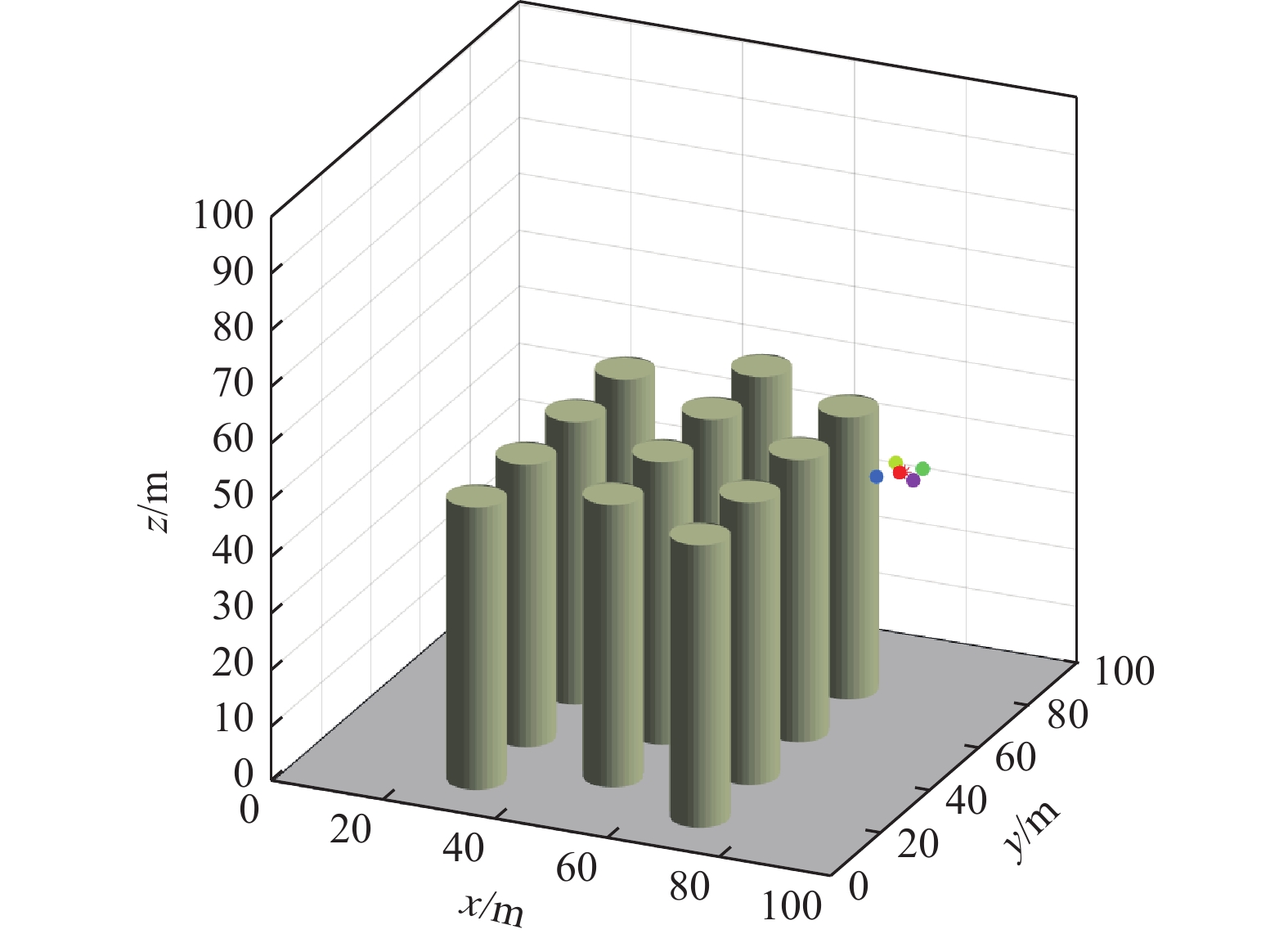
表3
优化后各参数"
| 参数 | 数值 |
| 0.01 | |
| − |
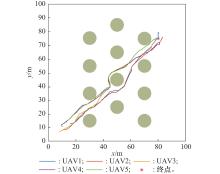
图10
优化后航迹图"
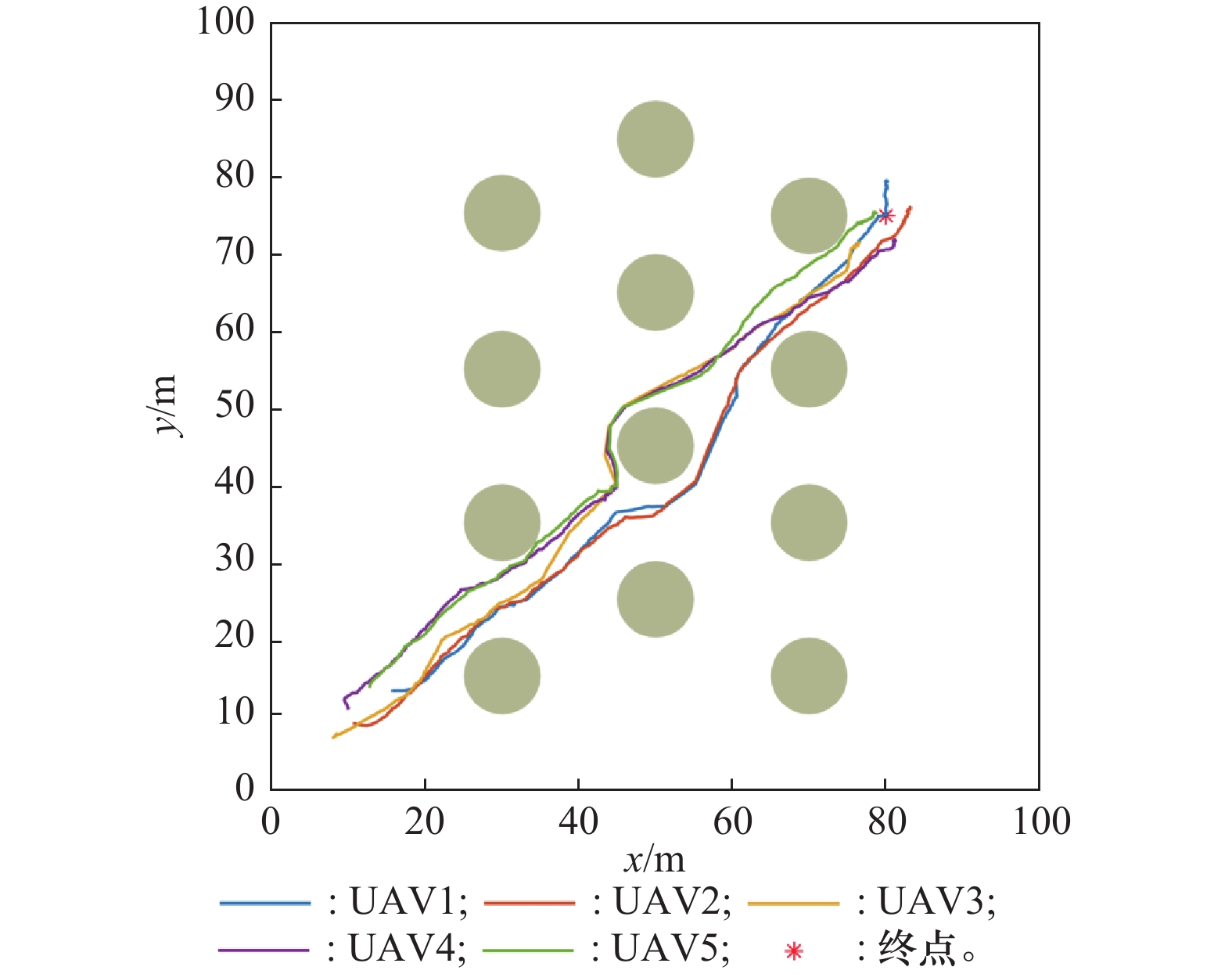
图11
UAV间平均距离-时间"
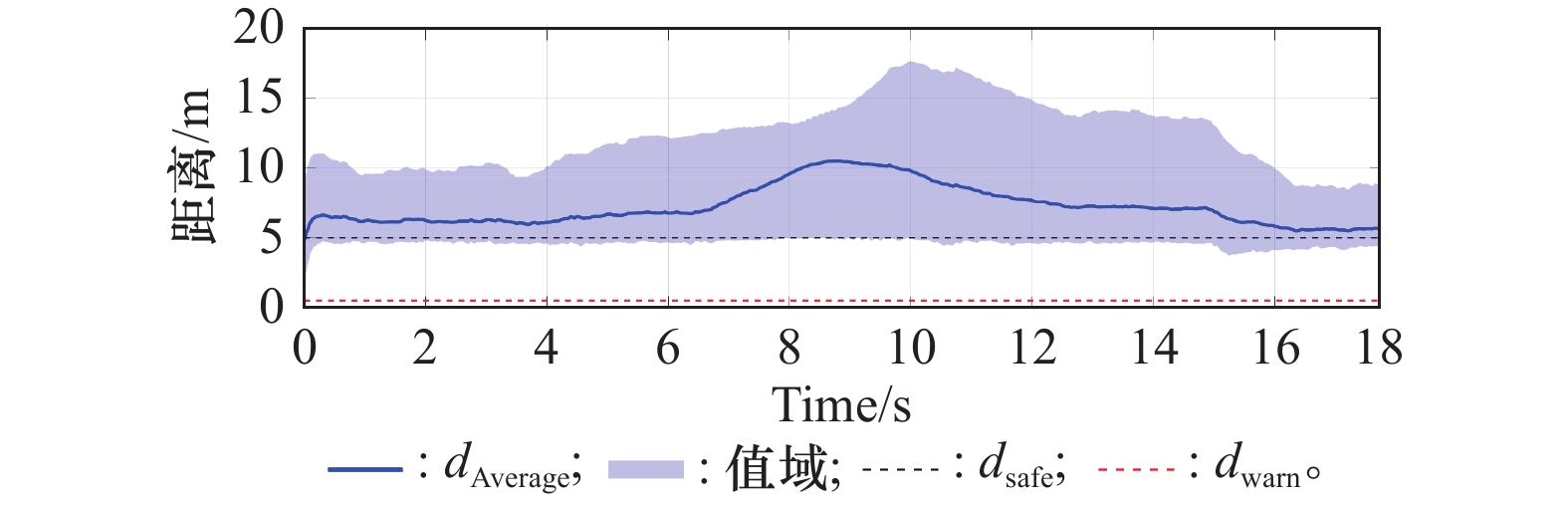
图12
UAV平均速度-时间"
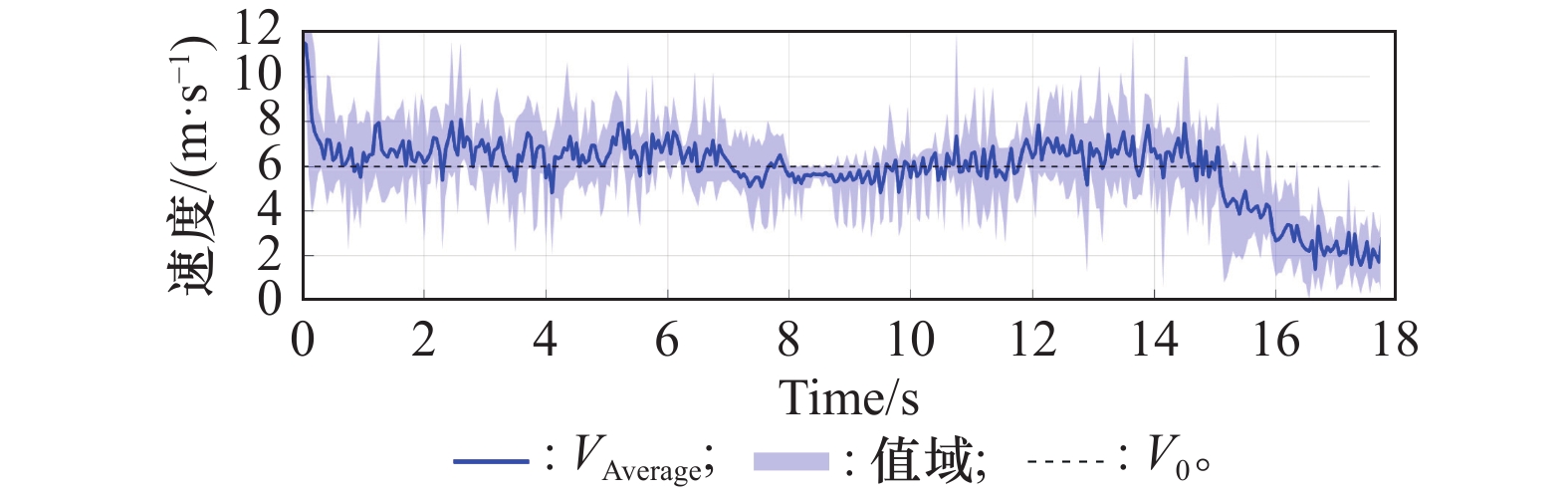

图13
场景2各UAV位置"
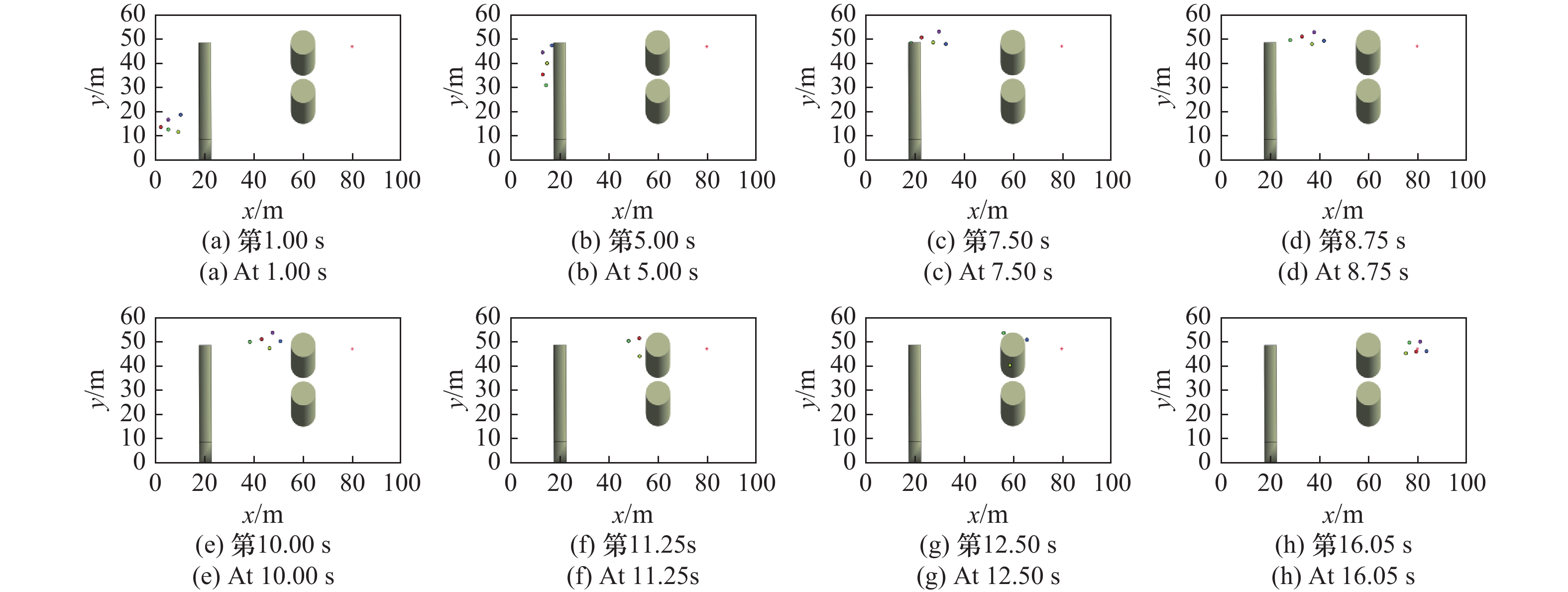
图14
避障场景2"
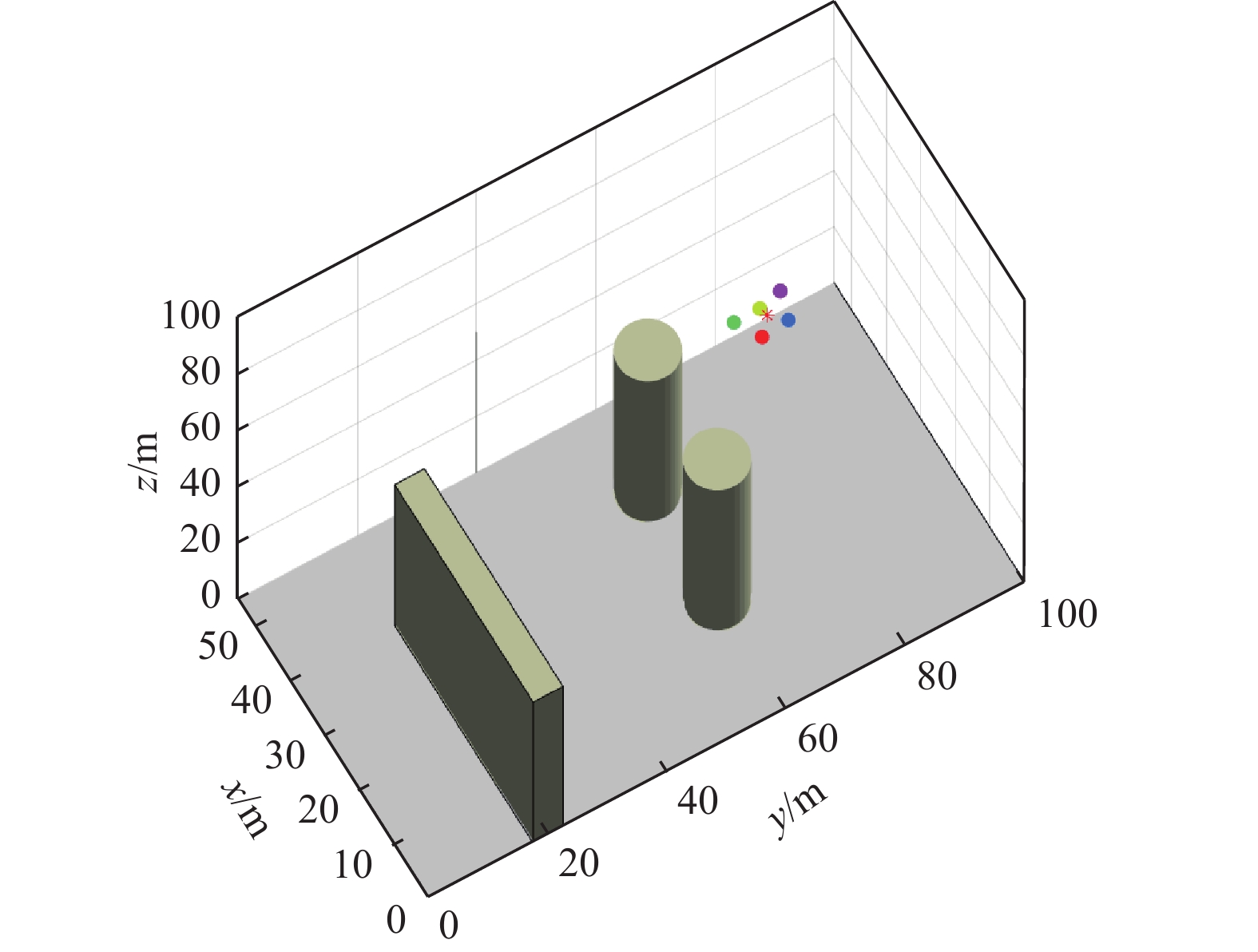
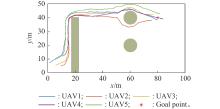
图15
场景2航迹图"
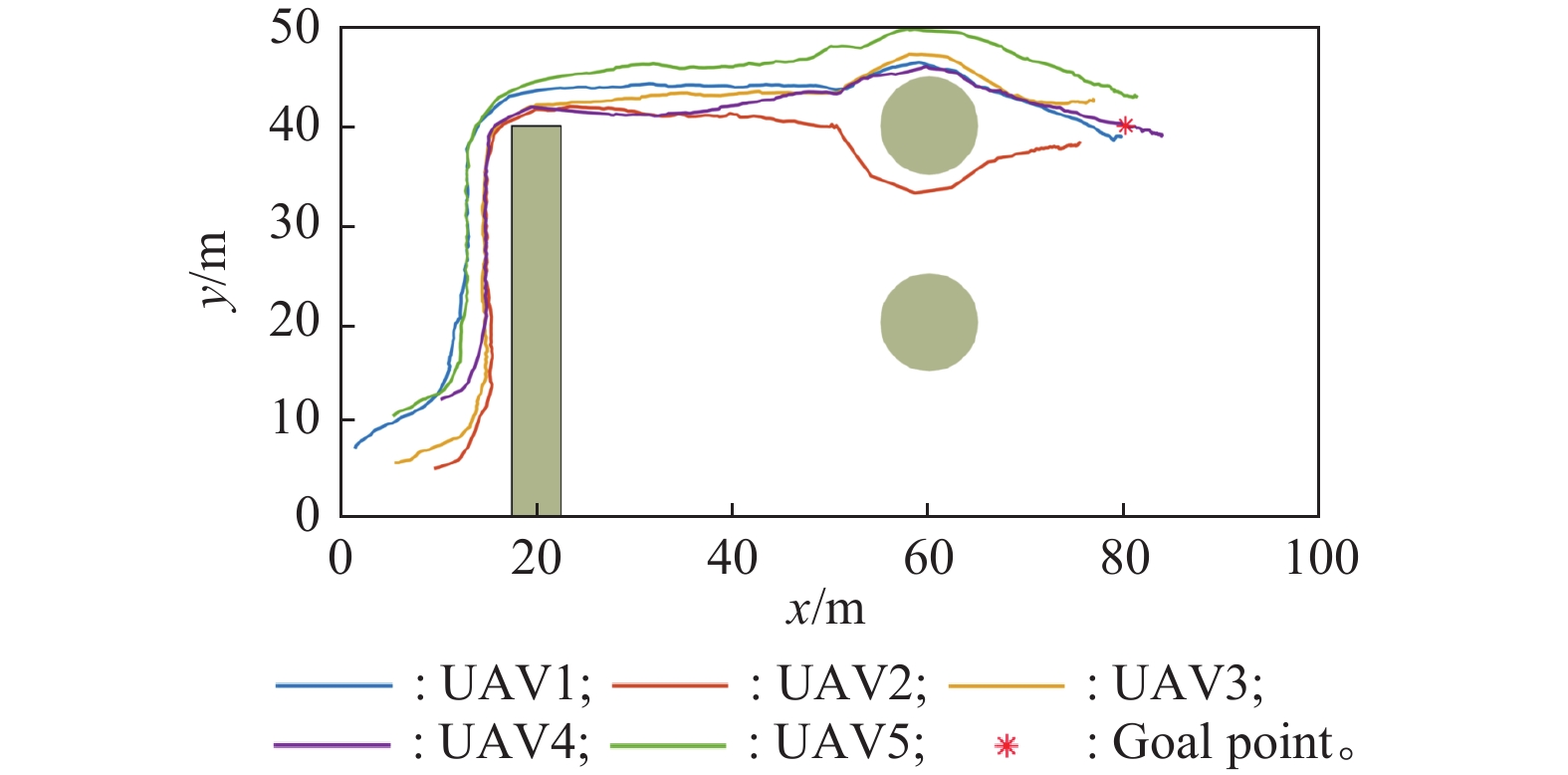
图16
场景2 UAV间平均距离-时间"
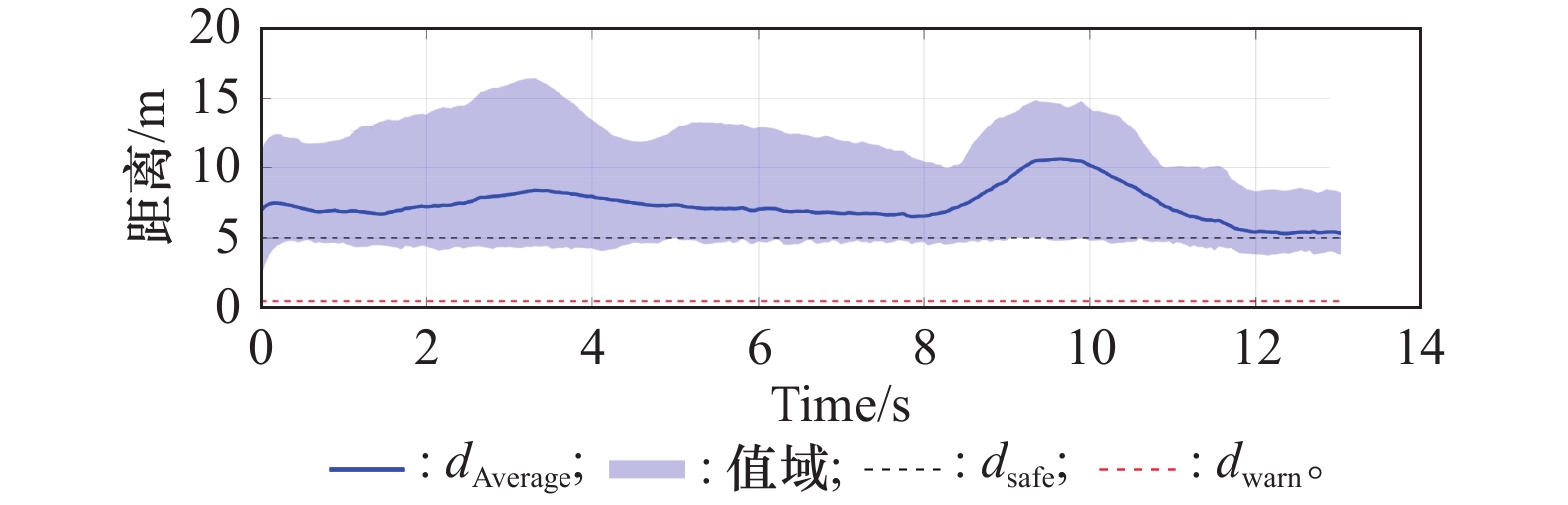
图17
场景2 UAV平均速度-时间"
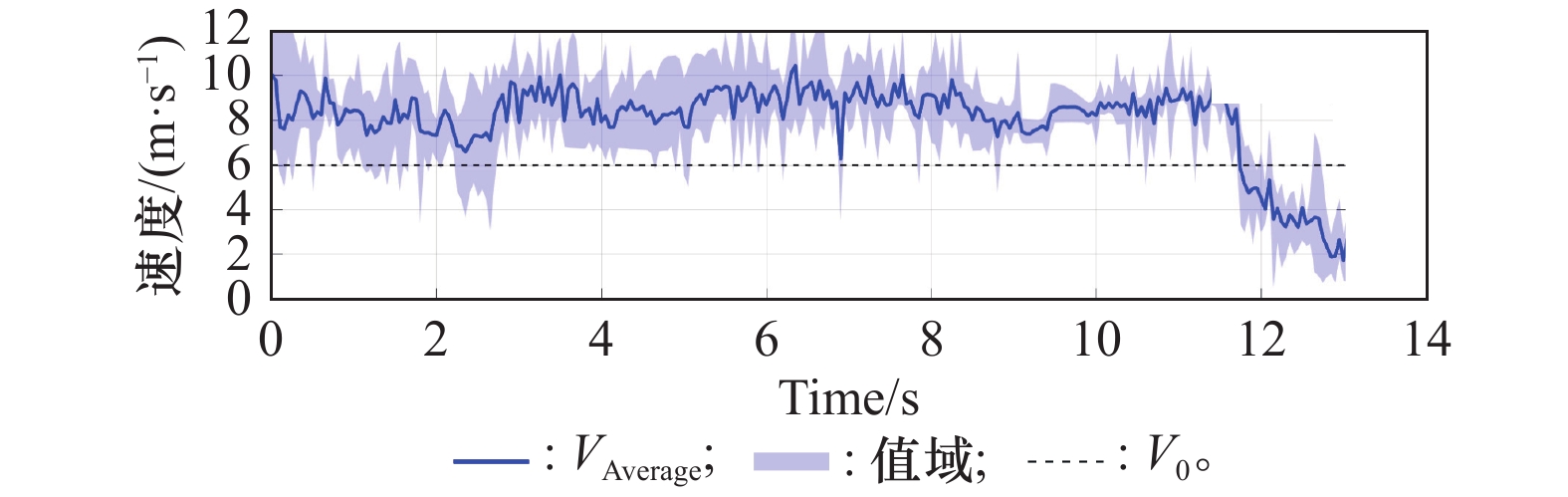

图18
场景3 各UAV位置"
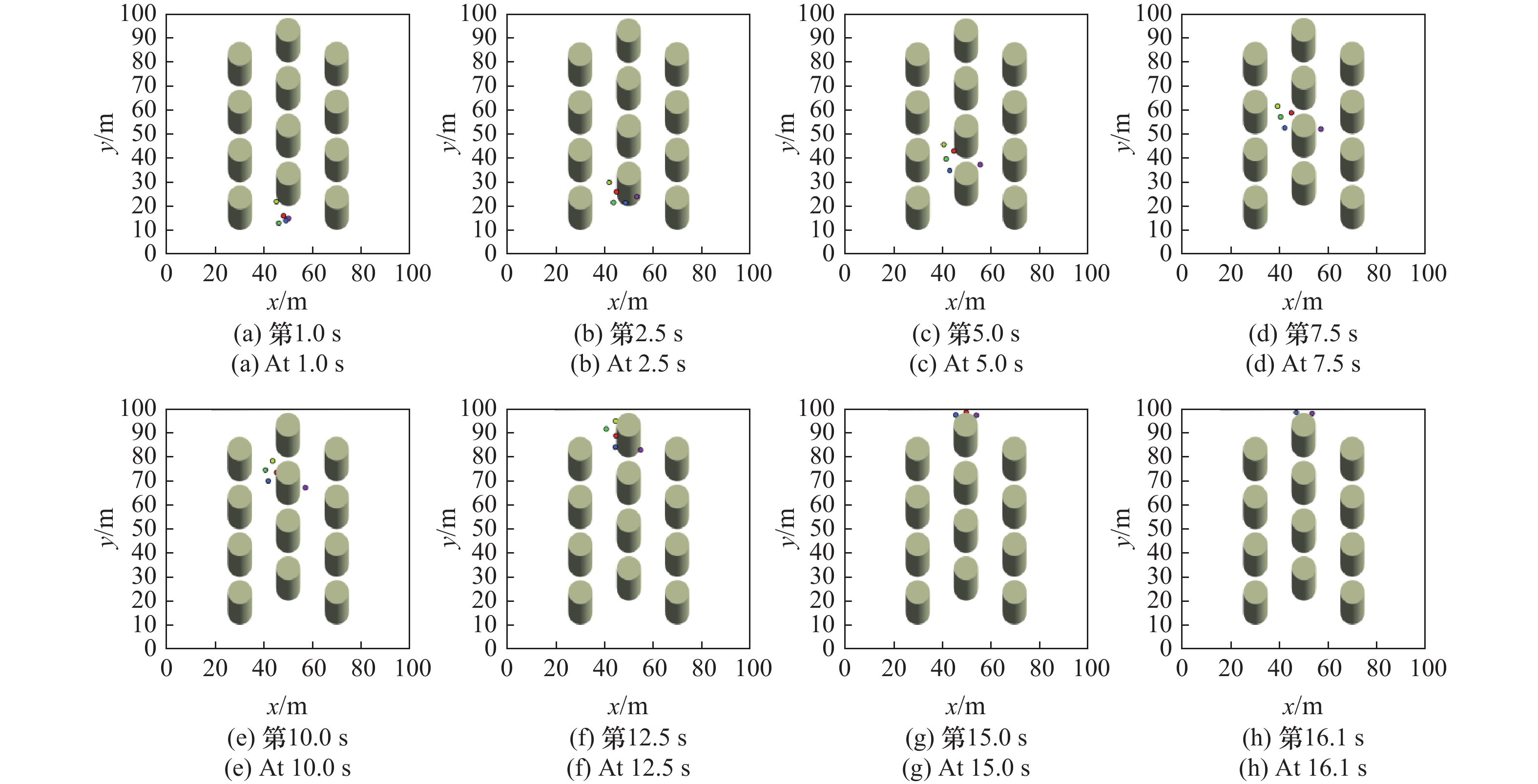
图19
场景3 航迹图"
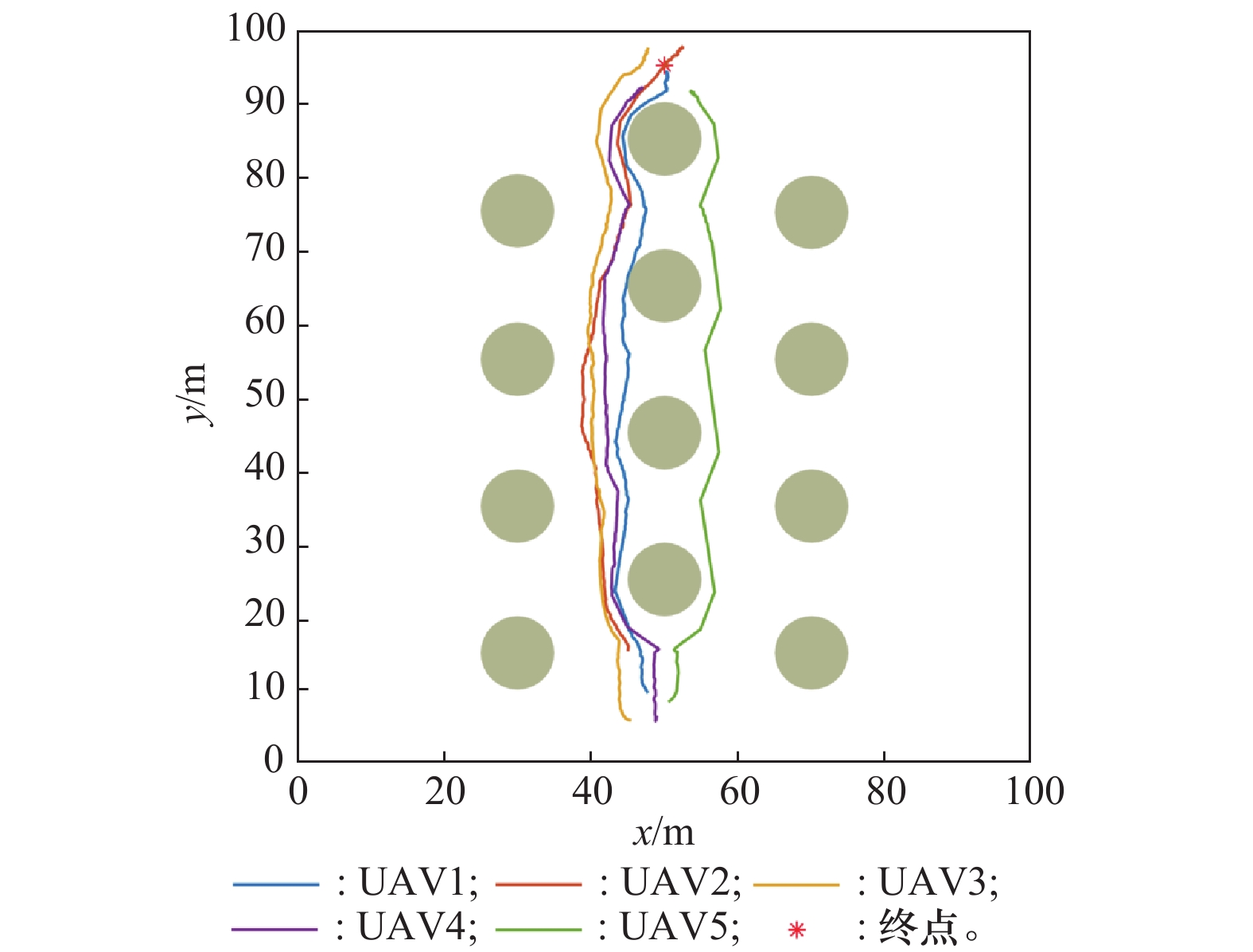
图20
场景3 UAV间均距离-时间"
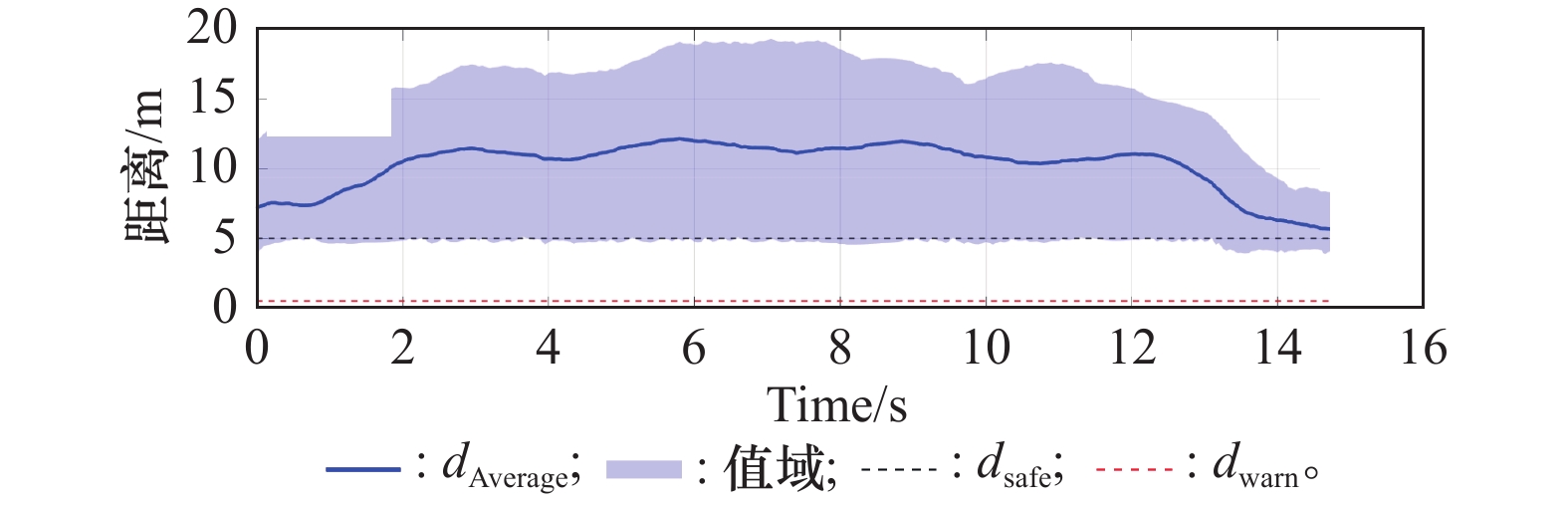
图21
场景3 UAV平均速度-时间"
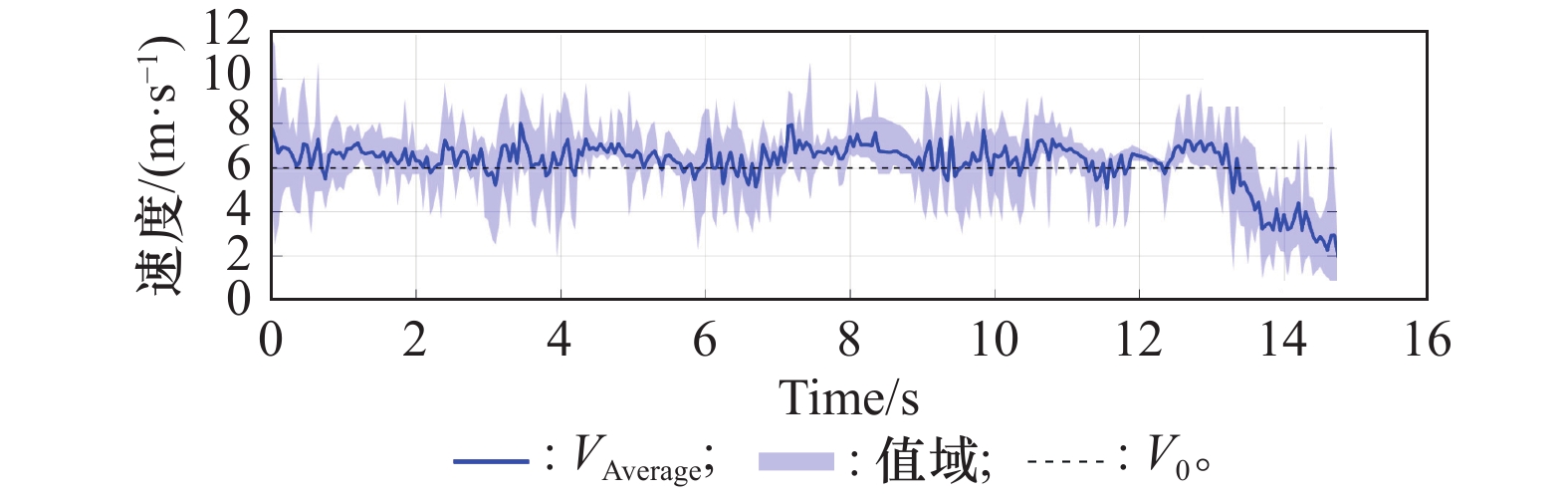
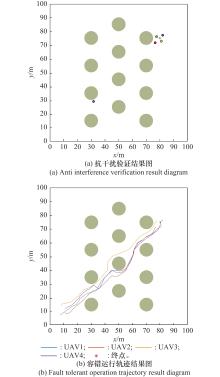
图22
抗干扰性验证"
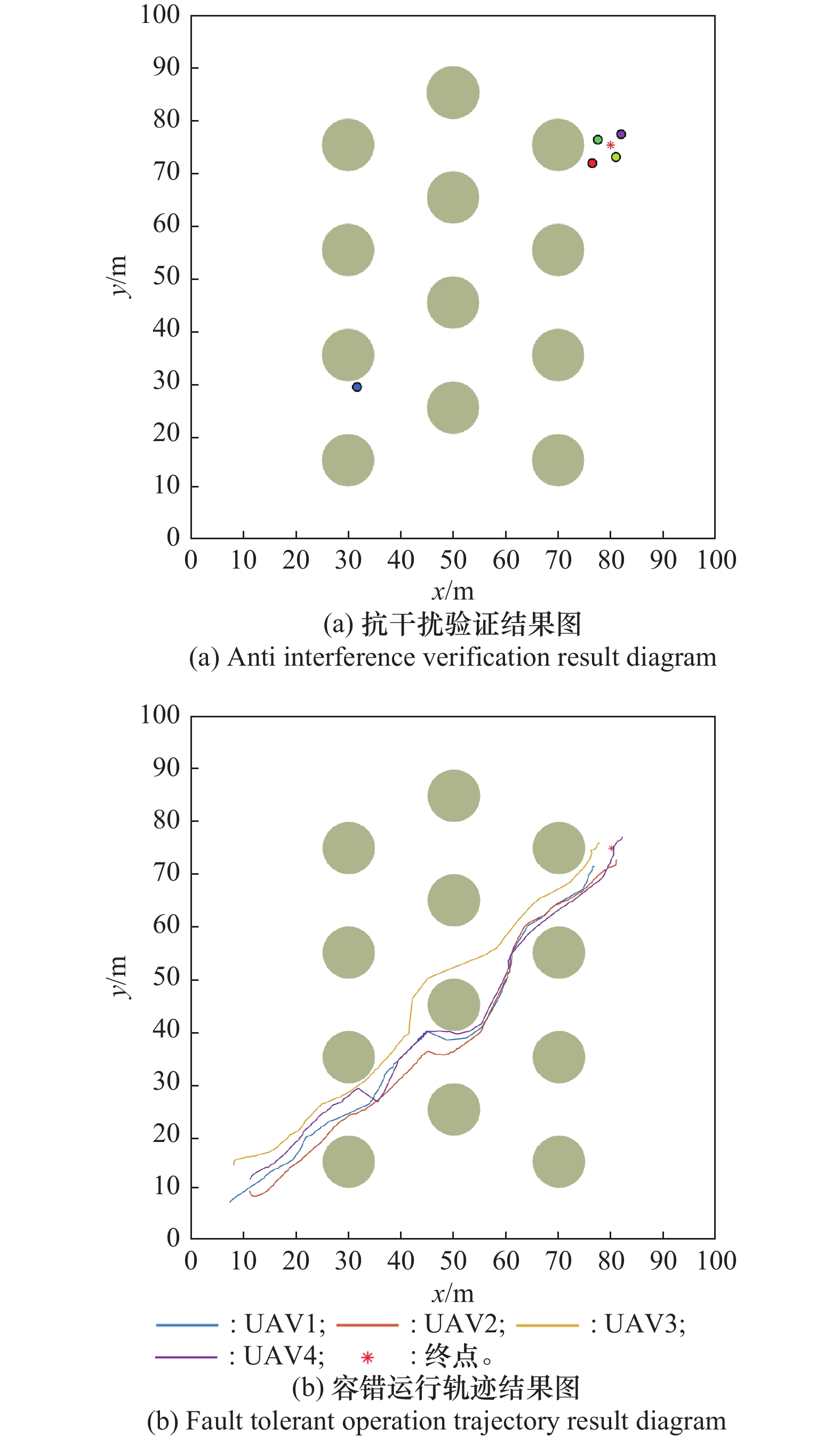
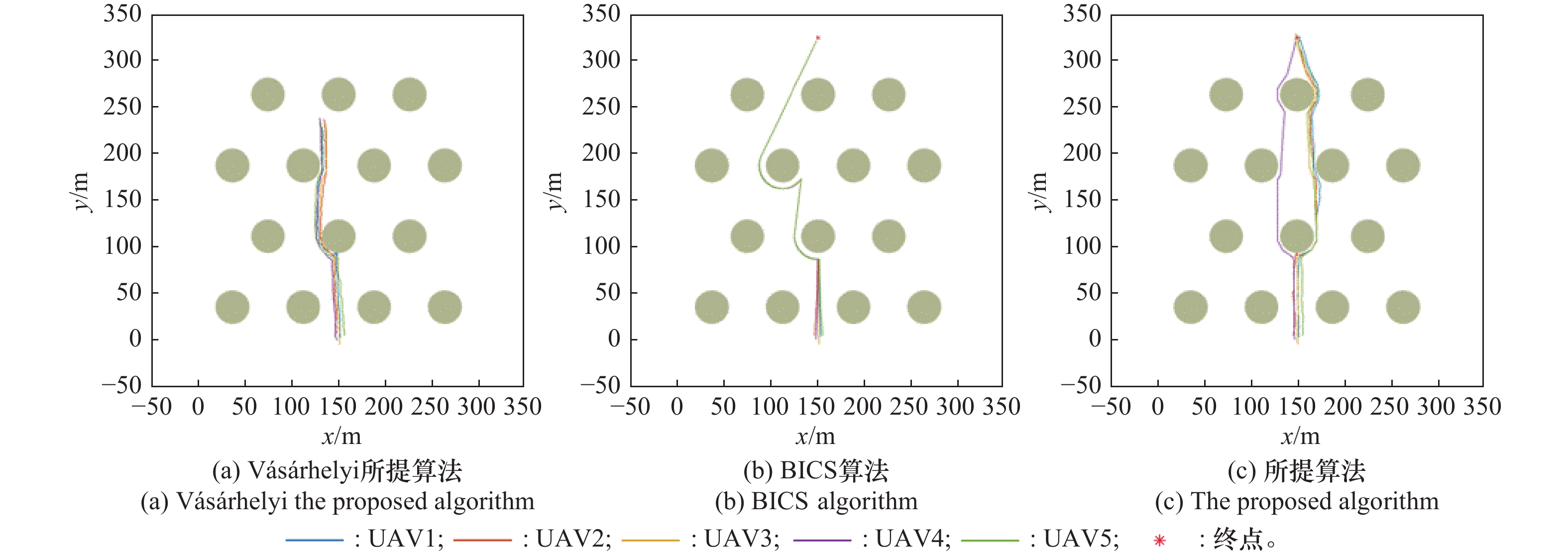
表4
到达目的地所需时间对比"
| 算法 | 所提算法 | Vásárhelyi所提算法 | BICS算法 |
| 时间/s | 58.05 | 100+ | 65 |

图23
算法运行航迹对比"
| 1 | 郭晶晶, 刘允刚, 满永超, 等. 自主多旋翼无人机系统: 感知、规划与控制[J]. 控制理论与应用, 2024, 41(10): 1707− 1725 |
| GUO J J, LIU Y G, MAN Y C, et al. Autonomous multi-rotor unmanned aerial vehicle system: perception, planning, and control [J]. Control Theory & Applications, 2024, 41(10): 1707− 1725 | |
| 2 | ZHOU Z W, DUAN H B, FAN Y M. Unmanned aerial vehicle close formation control based on the behavior mechanism in wild geese[J]. Science China Information Sciences, 2017, 47 (3): 230- 238. |
| 3 | 唐嘉宁, 陈伟, 陈云浩, 等. 一种多无人机协同定位与稠密地图构建算法[J]. 科学技术与工程, 2023, 23(35): 15124−15132. |
| TANG J N, CHEN W, CHEN Y H, et al. A multi UAV collaborative localization and dense map construction algorithm. Science Technology and Engineering, 2023, 23(35): 15124−15132. | |
| 4 | 李鸿一, 陈锦涛, 任鸿儒, 等. 基于随机采样的高层消防无人机协同搜索规划[J]. 中国科学: 信息科学, 2022, 52 (9): 1610. |
| LI H Y, CHEN J T, REN H R, et al. Collaborative search planning for high-rise firefighting uavs based on random sampling[J]. SCIENCE CHINA Information Sciences, 2022, 52 (9): 1610. | |
| 5 |
ARAFAT M Y, MOH S. Localization and clustering based on swarm intelligence in uav networks for emergency communications[J]. IEEE Internet of Things, 2019, 6 (5): 8958- 8976.
doi: 10.1109/JIOT.2019.2925567 |
| 6 |
CHEN R, YANG B, ZHANG W. Distributed and collaborative localization for swarming UAVs[J]. IEEE Internet of Things, 2021, 8 (6): 5062- 5074.
doi: 10.1109/JIOT.2020.3037192 |
| 7 |
ODONKOR P, BALL Z, CHOWDHURY S. Distributed operation of collaborating unmanned aerial vehicles for time-sensitive oil spill mapping[J]. Swarm and Evolutionary Computation, 2019, 46, 52- 68.
doi: 10.1016/j.swevo.2019.01.005 |
| 8 |
ZHOU B Y, XU H, SHEN S J. RACER: rapid collaborative exploration with a decentralized multi-UAV system[J]. IEEE Trans. on Robotics, 2023, 39 (3): 1816- 1835.
doi: 10.1109/TRO.2023.3236945 |
| 9 |
ZHOU L Y, LENG S P, LIU Q, et al. Intelligent UAV swarm cooperation for multiple targets tracking[J]. IEEE Internet of Things, 2022, 9 (1): 743- 754.
doi: 10.1109/JIOT.2021.3085673 |
| 10 | 贾永楠, 田似营, 李擎. 无人机集群研究进展综述[J]. 航空学报, 2020, 41 (S1): 4- 14. |
| JIA Y N, TIAN S Y, LI Q. A review of research progress on UAV swarm[J]. Acta Aeronautica Astronautica Sinica, 2020, 41 (S1): 4- 14. | |
| 11 |
王峰, 张衡, 韩孟臣, 等. 基于协同进化的混合变量多目标粒子群优化算法求解无人机协同多任务分配问题[J]. 计算机学报, 2021, 44 (10): 1967- 1983.
doi: 10.11897/SP.J.1016.2021.01967 |
|
WANG F, ZHANG H, HAN M C, et al. A hybrid variable multi objective particle swarm optimization algorithm based on coevolution for solving the collaborative multi task allocation problem of unmanned aerial vehicles[J]. Chinese Journal of Computers, 2021, 44 (10): 1967- 1983.
doi: 10.11897/SP.J.1016.2021.01967 |
|
| 12 | 王尔申, 刘帆, 宏晨, 等. 基于MASAC的无人机集群对抗博弈方法[J]. 中国科学: 信息科学, 2022, 52 (12): 2254−2269. |
| WANG E S, LIU F, HONG C, et al. MASAC based unmanned aerial vehicle swarm adversarial game method[J]. Science China Information Sciences, 2022, 52 (12): 2254−2269. | |
| 13 |
文超, 董文瀚, 解武杰, 等. 基于CEA-GA的多无人机三维协同曲线航迹规划方法[J]. 北京航空航天大学学报, 2023, 49 (11): 3086- 3099.
doi: 10.13700/j.bh.1001-5965.2021.0787 |
|
WEN C, DONG W H, XIE W J, et al. A three-dimensional collaborative curve trajectory planning method for multi-UAVs based on CEA-GA algorithm[J]. Journal of Beijing University Aeronautica Astronautica, 2023, 49 (11): 3086- 3099.
doi: 10.13700/j.bh.1001-5965.2021.0787 |
|
| 14 |
韩统, 汤安迪, 周欢, 等. 基于LASSA算法的多无人机协同航迹规划方法[J]. 系统工程与电子技术, 2022, 44 (1): 233- 241.
doi: 10.12305/j.issn.1001-506X.2022.01.29 |
|
HAN T, TANG A D, ZHOU H, et al. A collaborative trajectory planning method for multi-UAVs based on LASSA algorithm[J]. Journal of Systems Engineering and Electronics, 2022, 44 (1): 233- 241.
doi: 10.12305/j.issn.1001-506X.2022.01.29 |
|
| 15 |
俞宬, 陈谋, 雍可南. 基于改进RRT*算法的无人机往返航迹规划[J]. 中国科学: 技术科学, 2023, 53 (11): 1911- 1921.
doi: 10.1360/SST-2021-0431 |
|
YU C, CHEN M, YONG K N. UAV round-trip trajectory planning based on improved RRT* algorithm[J]. cience China Technology Science, 2023, 53 (11): 1911- 1921.
doi: 10.1360/SST-2021-0431 |
|
| 16 |
ZHANG Z, JIANG J, WU J, et al. Efficient and optimal penetration path planning for stealth unmanned aerial vehicle using minimal radar cross-section tactics and modified a-star algorithm[J]. ISA Transactions, 2023, 134, 42- 57.
doi: 10.1016/j.isatra.2022.07.032 |
| 17 | REYNOLDS C W. Flocks, herds and schools: a distributed behavioral model [C]// Proc. of the 14th annual conference on Computer graphics and interactive techniques, 1987. |
| 18 |
VICSEK T, ZAFEIRIS A. Collective motion[J]. Physics Reports, 2012, 517 (3/4): 71- 140.
doi: 10.1016/j.physrep.2012.03.004 |
| 19 |
COUZIN I D, KRAUSE J, JAMES R, et al. Collective memory and spatial sorting in animal groups[J]. Journal of Theoretical Biology, 2002, 218 (1): 1- 11.
doi: 10.1006/jtbi.2002.3065 |
| 20 |
VASARHELYI G, VIRAGH C, SOMORJAI G, et al. Optimized flocking of autonomous drones in confined[J]. Science Robotics, 2018, 3 (20): eaat3536.
doi: 10.1126/scirobotics.aat3536 |
| 21 |
AFZAL A, DANIEL L B, GIUSEPPE S, et al. PAVNav: a collective navigation approach for uav swarms deprived of communication and external localization[J]. Bioinspiration and Biomimetics, 2022, 17 (6): 066019.
doi: 10.1088/1748-3190/ac98e6 |
| 22 |
PAVEL P, VIKTOR W, TOMAS B, et al. Bio-inspired compact swarms of unmanned aerial vehicles without communication and external localization[J]. Bioinspiration and Biomimetics, 2021, 16 (2): 026009.
doi: 10.1088/1748-3190/abc6b3 |
| 23 | TAN Y, SHI Y H, MILAN T. Advances in swarm intelligence[M]. Cham: Springer International Publishing, 2020. |
| 24 | CUI Y, WANG C, HU Q L, et al. A novel positioning method for uav in GNSS-denied environments based on mechanical antenna [J]. IEEE Trans. on Industrial Electronics, 2024, 71(10);13461−13469. |
| 25 |
WANG B W, SUN Y J, DO-DUY T, et al. Adaptive D-Hop connected dominating set in highly dynamic flying Ad-Hoc networks[J]. IEEE Trans. on Network Science and Engineering, 2021, 8 (3): 2651- 2664.
doi: 10.1109/TNSE.2021.3103873 |
| 26 |
SHEN G Q, LEI L, LI Z L, et al. Deep reinforcement learning for flocking motion of multi-UAV systems: learn from a digital twin[J]. IEEE Internet of Things, 2022, 9 (13): 11141- 11153.
doi: 10.1109/JIOT.2021.3127873 |
| 27 |
QIU H X, DUAN H B. A multi-objective pigeon-inspired optimization approach to UAV distributed flocking among obstacles[J]. Information Science, 2020, 509, 515- 529.
doi: 10.1016/j.ins.2018.06.061 |
| 28 |
CHOWDHURY A, DEBASHIS D. RGSO-UAV: reverse glowworm swarm optimization inspired UAV path-planning in a 3D dynamic environment[J]. Ad Hoc Networks, 2023, 140, 103068.
doi: 10.1016/j.adhoc.2022.103068 |
| 29 | CHEN H T, HE M, LIU J T, et al. A novel fractional-order flocking algorithm for large-scale UAV swarms[J]. Complex & Intelligent Systems, 2023, 9 (6): 6831- 6844. |
| 30 | KONG F B, CHEN H, LI H M, et al. Flocking with obstacle avoidance for fixed-wing unmanned aerial vehicles via nonlinear model predictive control [C]//Proc. of the 42nd Chinese Control Conference, 2023. |
| 31 | MIRSAEIDI H, SHARIFI A. Heuristic-based trajectory optimization for drone flocking with obstacle avoidance [C]// Proc. of the 11th RSI International Conference on Robotics and Mechatronics, 2023. |
| 32 |
WU J, LUO C B, LUO Y, et al. Distributed UAV swarm formation and collision avoidance strategies over fixed and switching topologies[J]. IEEE Trans. on Cybernetics, 2022, 52 (10): 10969- 10979.
doi: 10.1109/TCYB.2021.3132587 |
| 33 | AFZAL A, VIKTOR W, PAVEL P, et al. Autonomous aerial swarming in GNSS-denied environments with high obstacle density [C]//Proc. of the IEEE International Conference on Robotics and Automation, 2021. |
| 34 | 桂雪琪, 李春涛. 基于视野和速度引导的无人机集群避障算法[J]. 系统仿真学报, 2023, 36(3): 545−554. |
| GUI X Q, LI C T. Obstacle avoidance algorithm for unmanned aerial vehicle clusters based on field of view and speed guidance [J]. Journal of System Simulation, 2023, 36(3): 545−554. | |
| 35 |
RENAUD B, PAWEL R. A model of collective behavior based purely on vision[J]. Science Advances, 2020, 6 (6): eaay0792.
doi: 10.1126/sciadv.aay0792 |
| 36 | XUE J K, SHEN B. A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems Science & Control Engineering, 2020, 8 (1): 22- 34. |
| [1] | 陆则宇, 王瑶, 吴蔚楠, 孙亦鸣, 龚春林. 三维动态环境下的无人机集群双层航迹规划[J]. 系统工程与电子技术, 2026, 48(1): 132-143. |
| [2] | 闻雯, 时晨光, 周建江. 多元威胁环境下无人机集群隐身航迹规划算法[J]. 系统工程与电子技术, 2025, 47(9): 2971-2984. |
| [3] | 耿泽, 黄炎焱, 张寒. 基于火炮转移路径预测的无人机集群反炮兵搜索路径规划[J]. 系统工程与电子技术, 2025, 47(4): 1222-1234. |
| [4] | 何宇珩, 袁宏杰, 李贺, 李直声. 基于麻雀搜索算法优化BP神经网络的飞机停放局部温度预测[J]. 系统工程与电子技术, 2025, 47(11): 3655-3662. |
| [5] | 王琛, 朱承, 王祥科, 丁兆云, 张千桢, 张胜, 朱先强. 无人机分布式集群反制动态多目标运动控制技术[J]. 系统工程与电子技术, 2025, 47(11): 3765-3778. |
| [6] | 张佳龙, 赵迪, 张普, 叶磊. 通讯受限下无人机集群自适应追踪控制[J]. 系统工程与电子技术, 2025, 47(10): 3401-3410. |
| [7] | 毕文豪, 张梦琦, 高飞, 杨咪, 张安. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3): 922-934. |
| [8] | 刘涛, 王沙沙, 张驰, 白光晗, 陶俊勇. 考虑韧性的无人机集群自组织区域覆盖方法[J]. 系统工程与电子技术, 2024, 46(3): 942-952. |
| [9] | 高程, 都延丽, 步雨浓, 刘燕斌, 王宇飞. 面向复杂多任务的异构无人机集群分组调配[J]. 系统工程与电子技术, 2024, 46(3): 972-981. |
| [10] | 孙谷昊, 蔡中泽, 曾庆双. 多智能体编队加权中心点固定时间分布式跟踪控制[J]. 系统工程与电子技术, 2024, 46(12): 4165-4172. |
| [11] | 殷雅萱, 张安, 毕文豪, 杨盼, 黄湛钧. 动态拓扑下四旋翼无人机集群蜂拥控制[J]. 系统工程与电子技术, 2024, 46(10): 3473-3483. |
| [12] | 刘兴宇, 蒋志彪, 蒋天瑞, 郭荣化, 常远, 闫超, 周晗. 基于通信功率自适应的无人机集群协同导航控制方法[J]. 系统工程与电子技术, 2024, 46(10): 3536-3546. |
| [13] | 薛锡瑞, 黄树彩, 韦道知, 吴建峰. 基于EMD-DESN的无人机集群航迹目的地预测[J]. 系统工程与电子技术, 2024, 46(1): 290-299. |
| [14] | 齐小刚, 周雨桐, 刘立芳. 无人机集群对地作战任务可靠性评估[J]. 系统工程与电子技术, 2023, 45(9): 2971-2978. |
| [15] | 张书衡, 翟茹萍, 刘永凯. 基于通信域和雷达域融合特征的无人机集群类型识别算法[J]. 系统工程与电子技术, 2023, 45(12): 3734-3742. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||