
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (3): 942-952.doi: 10.12305/j.issn.1001-506X.2024.03.20
刘涛, 王沙沙, 张驰, 白光晗, 陶俊勇
收稿日期:2022-04-28
出版日期:2024-02-29
发布日期:2024-03-08
通讯作者:
白光晗
作者简介:刘涛(1987—), 男, 工程师, 博士研究生, 主要研究方向为系统可靠性、系统韧性基金资助:Tao LIU, Shasha WANG, Chi ZHANG, Guanghan BAI, Junyong TAO
Received:2022-04-28
Online:2024-02-29
Published:2024-03-08
Contact:
Guanghan BAI
摘要:
为提高无人机集群执行自组织区域覆盖任务成功率, 提出一种基于个体相互作用力、边界排斥力、重点区域吸引力3种虚拟力的分布式自组织覆盖算法。在此基础上, 进一步考虑无人机个体自身故障或毁伤等失效的影响, 将集群韧性指标纳入到覆盖关键阈值调节机制中。仿真实验结果表明, 该方法能有效使无人机集群对目标区域及重点区域进行覆盖, 且能在集群发生故障或遭受毁伤后迅速进行自组织恢复, 获得较高的任务成功率。
中图分类号:
刘涛, 王沙沙, 张驰, 白光晗, 陶俊勇. 考虑韧性的无人机集群自组织区域覆盖方法[J]. 系统工程与电子技术, 2024, 46(3): 942-952.
Tao LIU, Shasha WANG, Chi ZHANG, Guanghan BAI, Junyong TAO. Resilience based self-organizing region coverage method for unmanned aerial vehicle swarm[J]. Systems Engineering and Electronics, 2024, 46(3): 942-952.
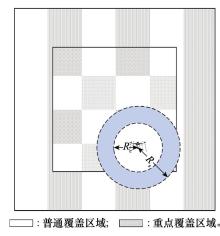
图1
无人机覆盖示意图"
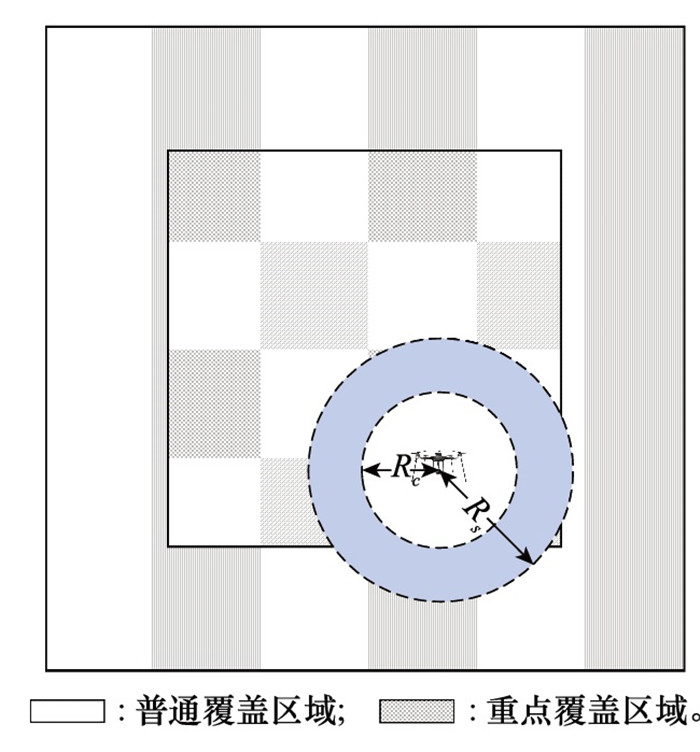
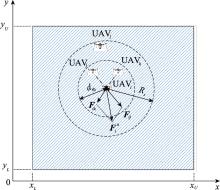
图2
无人机节点间的排斥力"
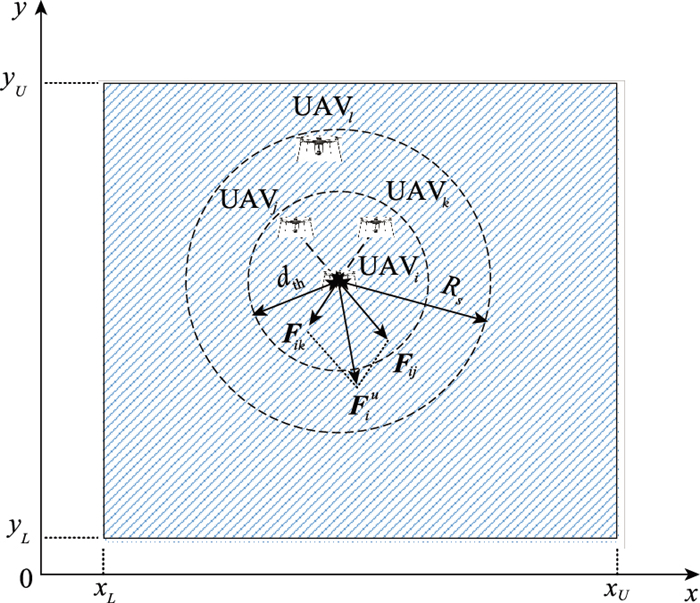
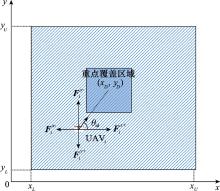
图3
无人机受外力分析"
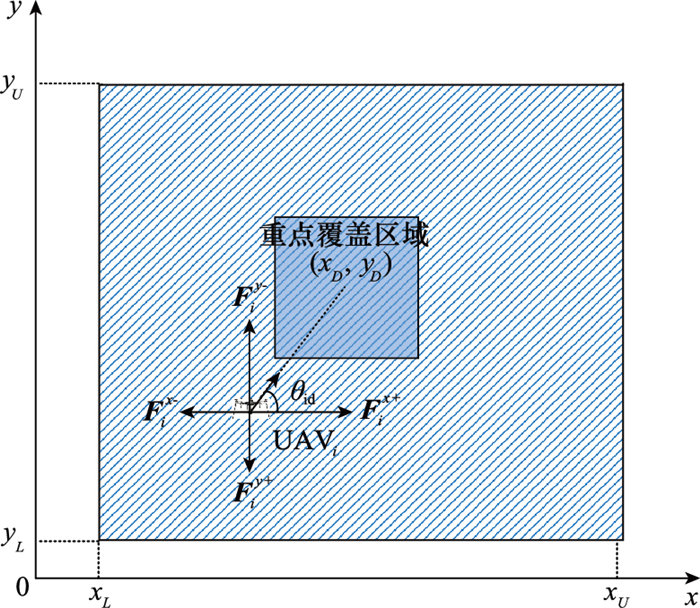
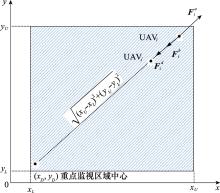
图4
无人机位置极端情况1"
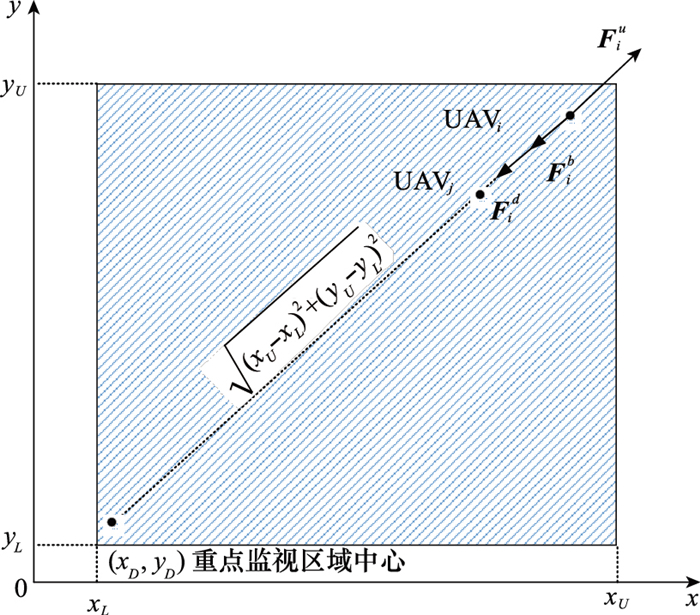
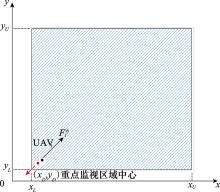
图5
无人机位置极端情况2"
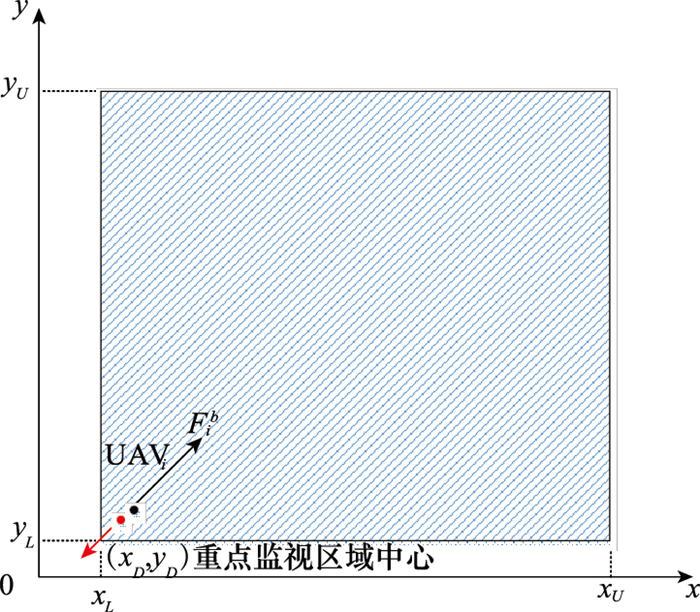
表1
各虚拟力的权重系数设计"
| 权重符号 | 取值 |
| ωu | |
| ωb | (Dc+0.5Dd)3 |
| ωd |
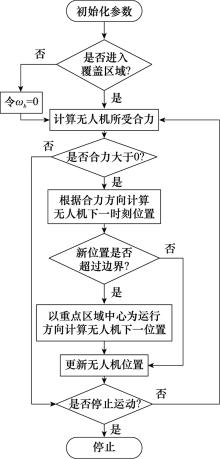
图6
无人机个体自组织算法流程图"
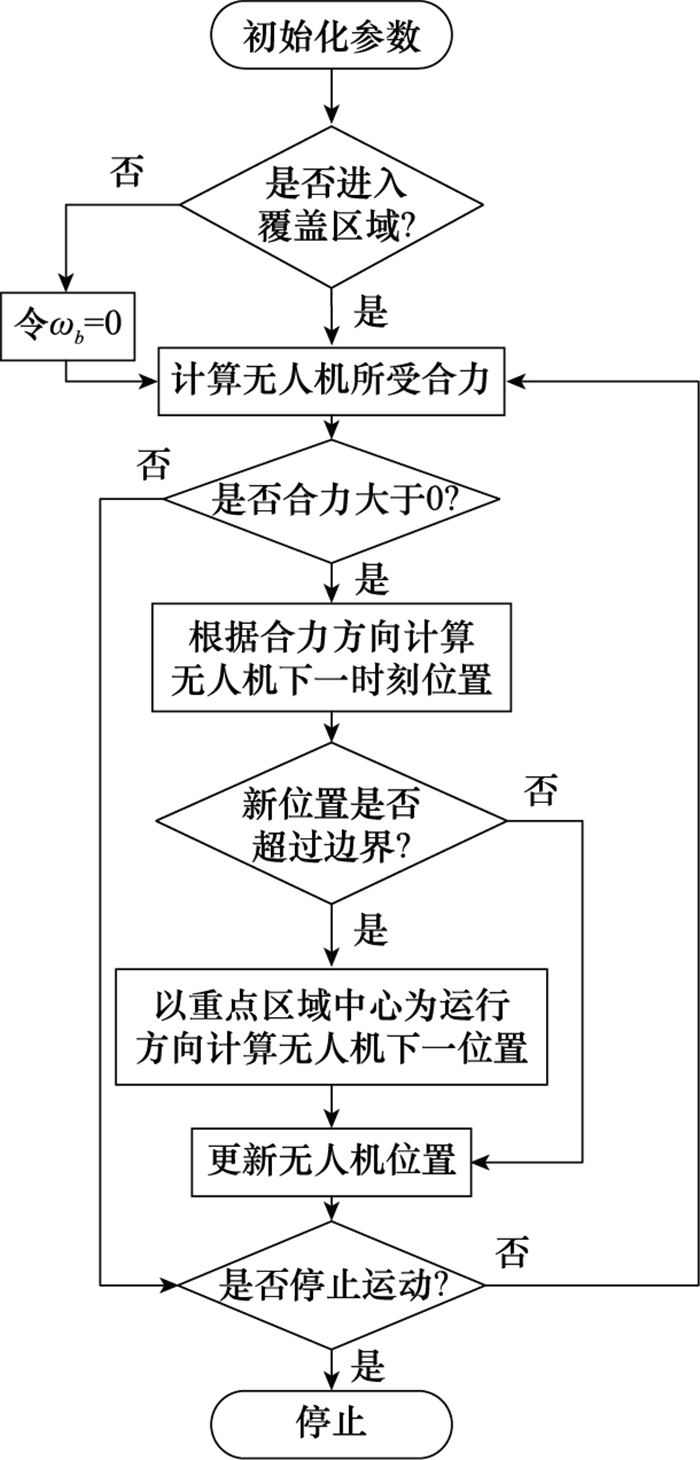
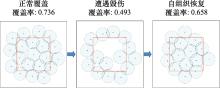
图7
集群自组织恢复过程"
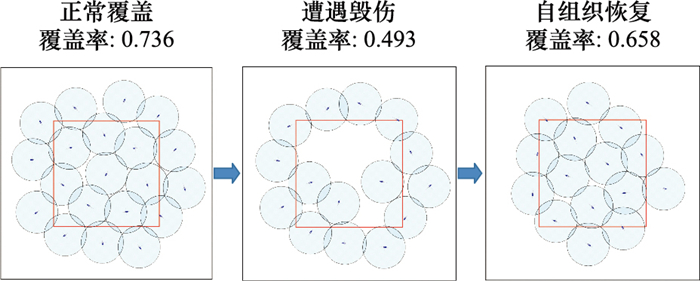

图8
覆盖关键阈值调节过程图"
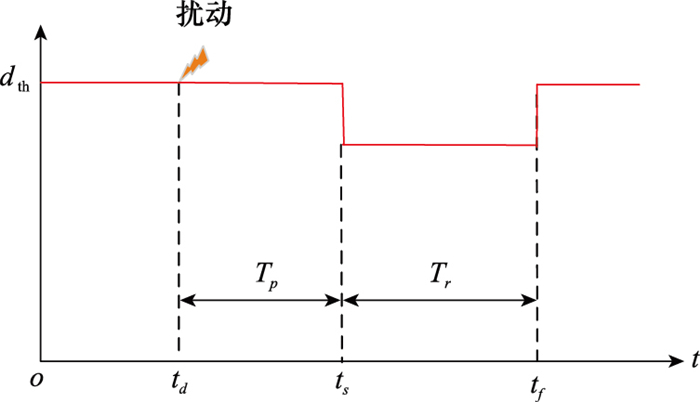
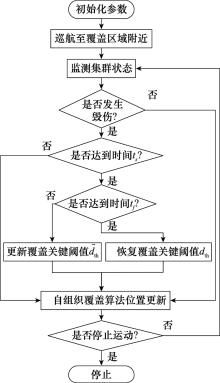
图9
韧性自组织覆盖算法流程"
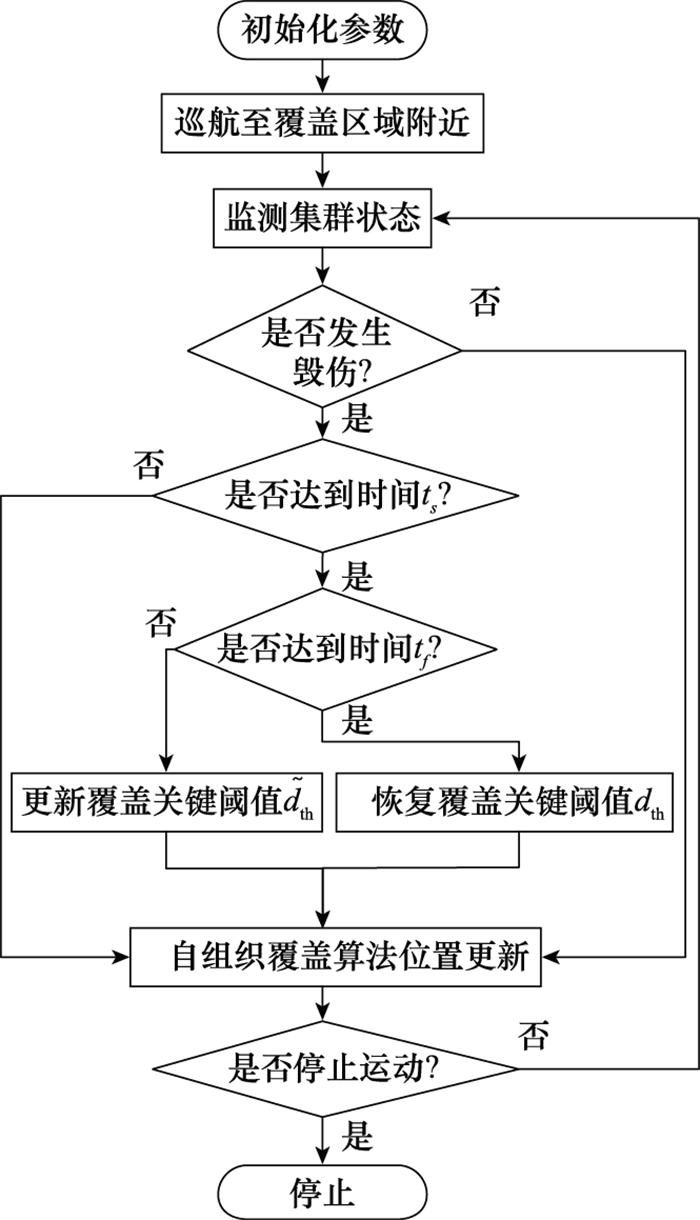

图10
不同重点区域中心无人机集群覆盖情况"
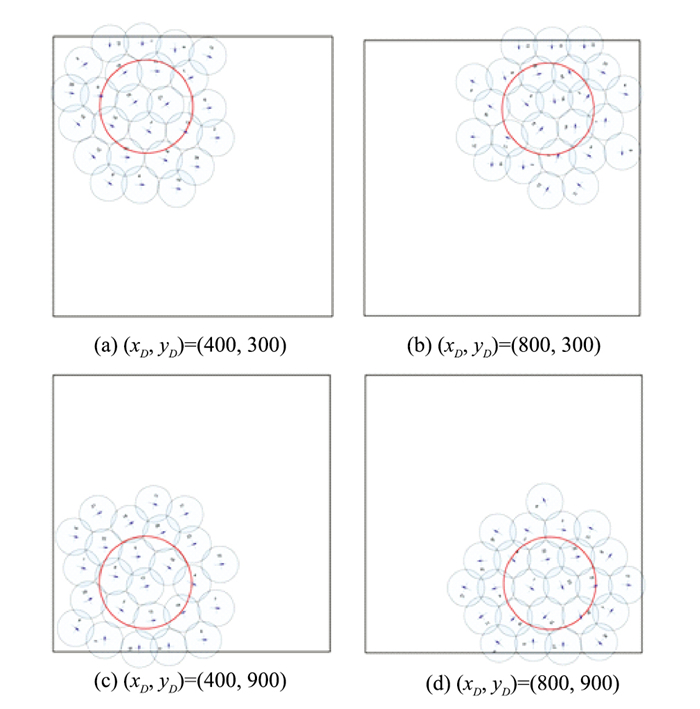

图11
n=20时集群覆盖情况"
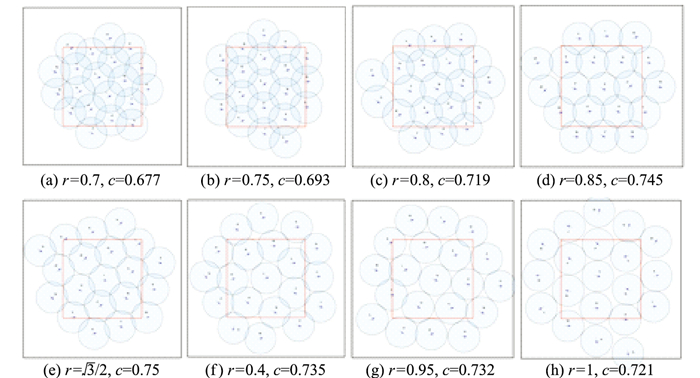

图12
n=30时集群覆盖情况"
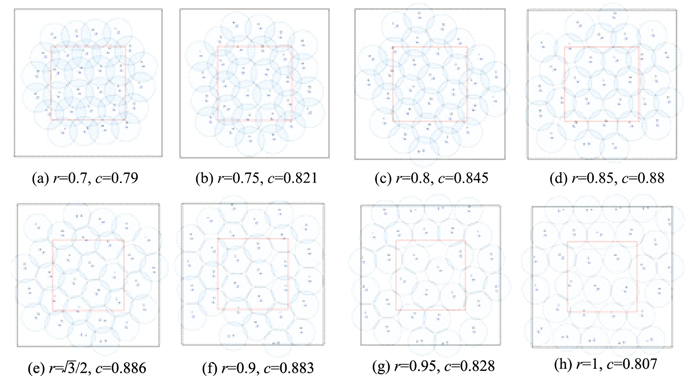

图13
n=40时集群覆盖情况"
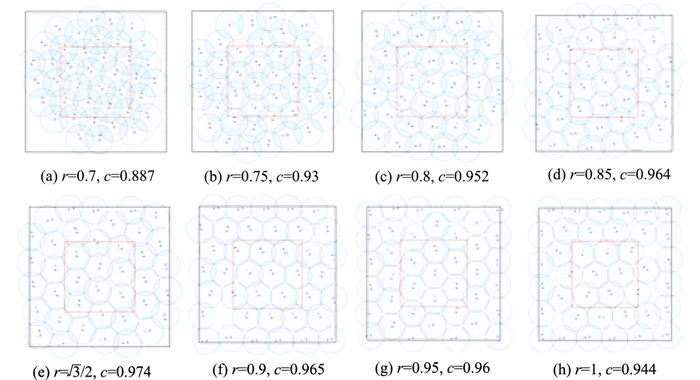

图14
n=50时集群覆盖情况"
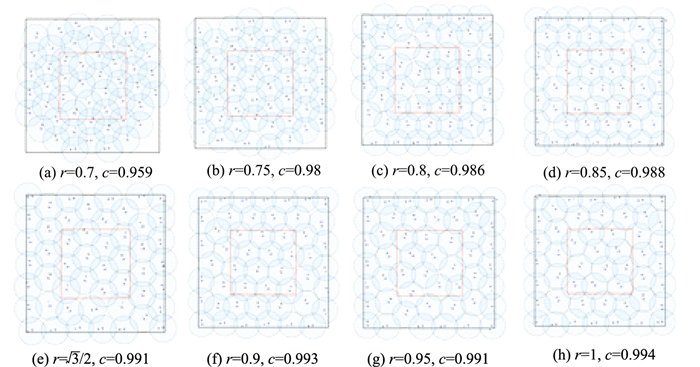
图15
无人机数量和不同关键阈值覆盖率大小"
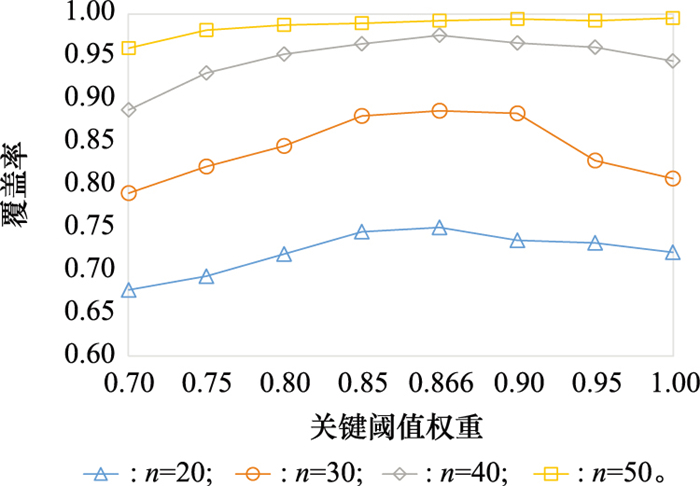
表2
实验参数表"
| 集群数量 | 最优性能PQ(t) | 任务需求${\bar Q}$(t) | 毁伤规模 |
| 20 | 1 | 0.6 | 5 |
| 30 | 1 | 0.8 | 5 |
| 40 | 1 | 0.9 | 5 |
| 50 | 1 | 0.95 | 5 |
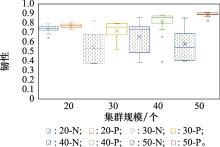
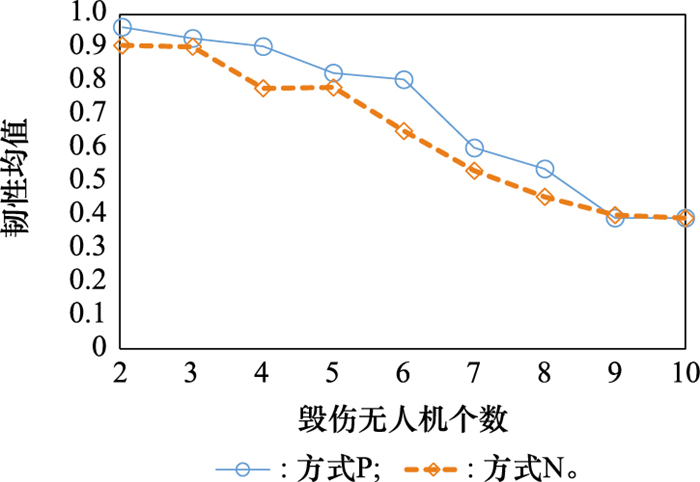
图16
不同集群规模下两种模式的韧性"
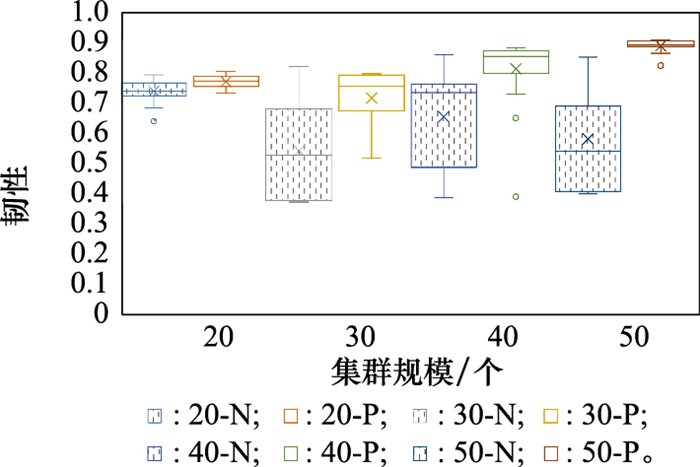
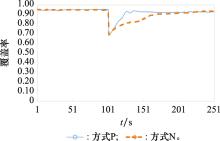
图17
n=40时两种模式下单次实验覆盖率随时间变化过程"
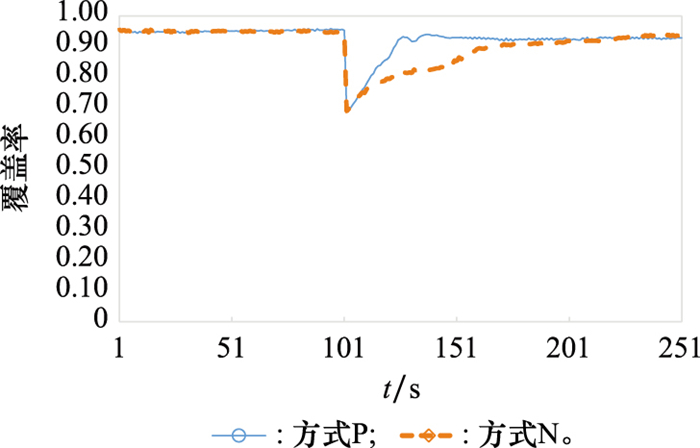
图18
n=40时无人机韧性随毁伤程度变化"
| 1 | MERWADAY A , TUNCER A , KUMBHAR A , et al. Improved throughput coverage in natural disasters: unmanned aerial base stations for public-safety communications[J]. IEEE Vehicular Technology Magazine, 2016, 11 (3): 53- 60. |
| 2 |
HYONDONG O , SEUNGKEUN K , JINYOUNG S , et al. Coordinated trajectory planning for efficient communication relay using multiple UAVs[J]. IFAC Proceedings Volumes, 2013, 46 (19): 119- 124.
doi: 10.3182/20130902-5-DE-2040.00060 |
| 3 |
TROTTA A , FELICE M , MONTORI F , et al. Joint coverage, connectivity, and charging strategies for distributed UAV networks[J]. IEEE Trans. on Robotics, 2018, 34 (4): 883- 900.
doi: 10.1109/TRO.2018.2839087 |
| 4 |
SCHWAGER M , VITUS M P , POWERS S , et al. Robust adaptive coverage control for robotic sensor networks[J]. IEEE Trans. on Control of Network Systems, 2017, 4 (3): 462- 476.
doi: 10.1109/TCNS.2015.2512326 |
| 5 |
YUE L , LIN C . UAV-assisted dynamic coverage in a heterogeneous cellular system[J]. IEEE Network, 2017, 31 (4): 56- 61.
doi: 10.1109/MNET.2017.1600280 |
| 6 | BERGER C, WZOREK M, KVARNSTROM J, et al. Area coverage with heterogeneous UAVs using scan patterns[C]//Proc. of the IEEE International Symposium on Safety, Security, and Rescue Robotics, 2016: 342-349. |
| 7 |
REINA D G , TAWFIK H , TORAL S L . Multi-subpopulation evolutionary algorithms for coverage deployment of UAV-networks[J]. Ad Hoc Networks, 2018, 68, 16- 32.
doi: 10.1016/j.adhoc.2017.09.005 |
| 8 | ZOU Y, CHAKRABARTY K. Sensor deployment and target localization based on virtual forces[C]//Proc. of the 22nd Annual Joint Conference of the IEEE Computer and Communications Societies, 2003. |
| 9 | 杨明华, 曹元大, 谭励, 等. 一种移动传感器网络精确部署算法[J]. 北京理工大学学报, 2009, 29 (1): 27- 31. |
| YANG M H , CAO Y D , TAN L , et al. A precision deployment algorithm in mobile sensor network[J]. Transactions of Beijing Institute of Technology, 2009, 29 (1): 27- 31. | |
| 10 |
LIN T Y , SANTOSO H A , WU K R . Global sensor deployment and local coverage-aware recovery schemes for smart environments[J]. IEEE Trans. on Mobile Computing, 2015, 14 (7): 1382- 1396.
doi: 10.1109/TMC.2014.2353613 |
| 11 |
ZHAO H T , MAO L , WEI J B . Coverage on demand: a simple motion control algorithm for autonomous robotic sensor networks[J]. Computer Networks, 2018, 135, 190- 200.
doi: 10.1016/j.comnet.2018.02.004 |
| 12 |
SEMNANI S H , BASIR O A . Semi-flocking algorithm for motion control of mobile sensors in large-scale surveillance systems[J]. IEEE Trans. on Cybern, 2015, 45 (1): 129- 137.
doi: 10.1109/TCYB.2014.2328659 |
| 13 | ZHAO T F , WANG H , MA Q W . The coverage method of unmanned aerial vehicle mounted base station sensor network based on relative distance[J]. International Journal of Distributed Sensor Networks, 2020, 16 (5): 1550147720920220. |
| 14 | 向庭立, 王红军, 杨刚, 等. 分布式无人机网络覆盖优化算法[J]. 空军工程大学学报(自然科学版), 2019, 20 (4): 59- 65. |
| XIANG T L , WANG H J , YANG G , et al. Research on distributed UAV network coverage optimization algorithm[J]. Journal of Air Force Engineering University (Natural Science Edition), 2019, 20 (4): 59- 65. | |
| 15 | HOLLING C S . Resilience and stability of ecological systems[J]. Annual Review of Ecology & Systematics, 1973, 4 (1): 1- 23. |
| 16 |
MARTIN R . Regional economic resilience, hysteresis and recessionary shocks[J]. Journal of Economic Geography, 2012, 12 (1): 1- 32.
doi: 10.1093/jeg/lbr019 |
| 17 | WINK R . Regional economic resilience: policy experiences and issues in europe[J]. Raumforschung Und Raumordnung, 2014, 72, 83- 84. |
| 18 |
ADGER W N . Social and ecological resilience: are they related?[J]. Progress in Human Geography, 2000, 24 (3): 347- 364.
doi: 10.1191/030913200701540465 |
| 19 |
KECK M , SAKDAPOLRAK P . What is social resilience? Lessons learned and ways forward[J]. Erdkunde, 2013, 67 (1): 5- 19.
doi: 10.3112/erdkunde.2013.01.02 |
| 20 | ZHANG L M , ZENG G W , LI D Q , et al. Scale-free resilience of real traffic jams[J]. Proceedings of the National Academy of Sciences of the United States of America, 2019, 116 (18): 8673- 8678. |
| 21 | 蓝羽石, 周光霞, 王珩, 等. 韧性指挥信息系统构建机理及实现研究[J]. 指挥与控制学报, 2015, 1 (3): 284- 291. |
| LAN Y S , ZHOU G X , WAMG Y , et al. Construction mechanism and implementation of resilient command information systems[J]. Journal of Command and Control, 2015, 1 (3): 284- 291. | |
| 22 | 费爱国. 韧性指挥与控制系统设计相关问题探析[J]. 指挥信息系统与技术, 2017, 8 (2): 1- 4. |
| FEI A G . Analysis on related issues about resilient command and control system design[J]. Command Information System and Technology, 2017, 8 (2): 1- 4. | |
| 23 |
LIU T , BAI G H , TAO J Y , et al. Modeling and evaluation method for resilience analysis of multi-state networks[J]. Reliability Engineering and System Safety, 2022, 226, 108663.
doi: 10.1016/j.ress.2022.108663 |
| 24 |
HOSSEINI S , BARKER K , RAMIREZ-MARQUEZ J E . A review of definitions and measures of system resilience[J]. Reliability Engineering and System Safety, 2016, 145, 47- 61.
doi: 10.1016/j.ress.2015.08.006 |
| 25 | 刘涛, 白光晗, 陶俊勇, 等. 面向任务的复杂系统韧性评估方法[J]. 系统工程与电子技术, 2021, 43 (4): 1003- 1011. |
| LIU T , BAI G H , TAO J Y , et al. Mission-oriented resi-lience evaluation for complex system[J]. Systems Engineering and Electronics, 2021, 43 (4): 1003- 1011. | |
| 26 | 肖智文, 王国庆, 朱建明, 等. 面向突发事件的电网韧性能力评价及构建方法[J]. 系统工程理论与实践, 2019, 39 (10): 2637- 2645. |
| XIAO Z W , WANG G Q , ZHU J M , et al. Method for assessing and constructing power system resilience under emergency events[J]. System Engineering Theory and Practice, 2019, 39 (10): 2637- 2645. | |
| 27 |
BAI G H , LI Y J , FANG Y N , et al. Network approach for resilience evaluation of a UAV swarm by considering communication limits[J]. Reliability Engineering and System Safety, 2020, 193, 106602.
doi: 10.1016/j.ress.2019.106602 |
| 28 | CHENG C C , BAI G H , ZHANG Y A , et al. Resilience evaluation for UAV swarm performing joint reconnaissance mission[J]. Chaos, 2019, 29 (5): 053132. |
| 29 | 潘星, 张国忠, 张跃东, 等. 工程弹性系统与系统弹性理论研究综述[J]. 系统工程与电子技术, 2019, 41 (9): 2006- 2015. |
| PAN X , ZHANG G Z , ZHANG Y D , et al. Review of engineered resilient systems and system resilience theory[J]. Systems Engineering and Electronics, 2019, 41 (9): 2006- 2015. | |
| 30 | 李瑞莹, 杜时佳, 康锐. 复杂系统弹性建模与评估[M]. 北京: 化学工业出版社, 2019. |
| LI R Y , DU S J , KANG R . Elastic modeling and evaluation of complex systems[M]. Beijing: Chemical Industry Press, 2019. | |
| 31 | BRUNEAU M , CHANG S E , EGUCHI R T , et al. A framework to quantitatively assess and enhance the seismic resilience of communities[J]. Earthquake Spectra, 2012, 19 (4): 733- 752. |
| 32 | MORAES R S , FREITAS E P . Distributed control for groups of unmanned aerial vehicles performing surveillance missions and providing relay communication network services[J]. Journal of Intelligent and Robotic Systems, 2018, 92, 645- 656. |
| [1] | 毕文豪, 张梦琦, 高飞, 杨咪, 张安. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3): 922-934. |
| [2] | 高程, 都延丽, 步雨浓, 刘燕斌, 王宇飞. 面向复杂多任务的异构无人机集群分组调配[J]. 系统工程与电子技术, 2024, 46(3): 972-981. |
| [3] | 薛锡瑞, 黄树彩, 韦道知, 吴建峰. 基于EMD-DESN的无人机集群航迹目的地预测[J]. 系统工程与电子技术, 2024, 46(1): 290-299. |
| [4] | 齐小刚, 周雨桐, 刘立芳. 无人机集群对地作战任务可靠性评估[J]. 系统工程与电子技术, 2023, 45(9): 2971-2978. |
| [5] | 朱欣怡, 张宇. 基于NDN的移动自组织网络协助边缘缓存策略[J]. 系统工程与电子技术, 2023, 45(7): 2227-2235. |
| [6] | 刘瑶, 夏阳升, 石建迈, 陈超, 黄金才. 车载多无人机协同多区域覆盖路径规划方法[J]. 系统工程与电子技术, 2023, 45(5): 1380-1390. |
| [7] | 张书衡, 翟茹萍, 刘永凯. 基于通信域和雷达域融合特征的无人机集群类型识别算法[J]. 系统工程与电子技术, 2023, 45(12): 3734-3742. |
| [8] | 刘大千, 包卫东, 费博雯, 朱晓敏. 未知城市环境下的多机协同目标搜索方法研究[J]. 系统工程与电子技术, 2023, 45(12): 3896-3907. |
| [9] | 罗瑞宁, 黄树彩, 赵岩, 张振. 子母导弹反无人机集群制导策略[J]. 系统工程与电子技术, 2023, 45(10): 3249-3258. |
| [10] | 翟茹萍, 张书衡, 平嘉蓉. 复杂多径环境下的无人机集群通信波形识别[J]. 系统工程与电子技术, 2023, 45(10): 3312-3320. |
| [11] | 徐任杰, 宫琳, 谢剑, 刘欣, 杨克巍. 基于装备体系韧性的作战网络链路重要度评估及恢复策略[J]. 系统工程与电子技术, 2023, 45(1): 139-147. |
| [12] | 杨少龙, 黄金, 向先波, 李伟超. 基于置信椭圆的无人艇区域覆盖搜寻规划优化[J]. 系统工程与电子技术, 2022, 44(7): 2263-2269. |
| [13] | 张东东, 艾小川, 刘畅. 基于相似样本特征提取的装备性能退化研究[J]. 系统工程与电子技术, 2022, 44(7): 2374-2380. |
| [14] | 谷旭平, 唐大全. 基于联邦滤波算法的无人机集群分层协同导航[J]. 系统工程与电子技术, 2022, 44(3): 967-976. |
| [15] | 杨兴家, 段克清, 李想, 祁炜. 无人机集群协同探测距离解模糊方法[J]. 系统工程与电子技术, 2022, 44(2): 480-489. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||