| 1 |
ABUALIGAH L , DIABAT A , SUMARI P , et al. Applications, deployments, and integration of internet of drones (IoD): a review[J]. IEEE Sensors Journal, 2021, 21 (22): 25532- 25546.
doi: 10.1109/JSEN.2021.3114266
|
| 2 |
DAUD S M , YUSOF M Y , HEO C C , et al. Applications of drone in disaster management: a scoping review[J]. Science & Justice, 2021, 62 (1): 30- 42.
|
| 3 |
NEDJATI A , IZBIRAK G , VIZVARI B , et al. Complete cove-rage path planning for a multi-UAV response system in post-earthquake assessment[J]. Robotics, 2016, 5 (4): 26- 40.
doi: 10.3390/robotics5040026
|
| 4 |
SHAHMORADI J , TALEBI E , ROGHANCHI P , et al. A comprehensive review of applications of Drone technology in the mining industry[J]. Drones, 2020, 4 (3): 34- 58.
doi: 10.3390/drones4030034
|
| 5 |
MADJIDI H, NEGAHDARIPOUR S, BANDARI E. Vision-based positioning and terrain mapping by global alignment for UAVs[C]//Proc. of the IEEE Conference on Advanced Video and Signal Based Surveillance, 2003: 305-312.
|
| 6 |
LYU X , LI X B , DANG D L , et al. Unmanned aerial vehicle (UAV) remote sensing in grassland ecosystem monitoring: a systematic review[J]. Remote Sensing, 2022, 14 (5): 1096- 1114.
doi: 10.3390/rs14051096
|
| 7 |
OKSANEN T , VISALA A . Coverage path planning algorithms for agricultural field machines[J]. Journal of Field Robotics, 2009, 26 (8): 651- 668.
doi: 10.1002/rob.20300
|
| 8 |
庞强伟, 胡永江, 李文广, 等. 多无人机协同侦察任务规划方法研究综述[J]. 电讯技术, 2019, 59 (6): 741- 748.
|
|
PANG Q W , HU Y J , LI W G , et al. Research on multi-UAV cooperative reconnaissance mission planning methods: an overview[J]. Telecommunication Engineering, 2019, 59 (6): 741- 748.
|
| 9 |
谢朋志, 魏晨. 单侧区域分割的多无人机扫描线搜索方法研究[J]. 航空兵器, 2020, 27 (3): 67- 72.
|
|
XIE P Z , WEI C . Research on scanning line search method for multi-UAV based on unilateral region segmentation[J]. Aero Weaponry, 2020, 27 (3): 67- 72.
|
| 10 |
庞强伟, 胡永江, 李文广. 基于垂直区域宽度分解的无人机覆盖航迹规划[J]. 系统工程与电子技术, 2019, 41 (11): 2550- 2558.
|
|
PANG Q W , HU Y J , LI W G . UAV coverage track planning based on decomposition along the direction of perpendicular to the width of the area[J]. Systems Engineering and Electronics, 2019, 41 (11): 2550- 2558.
|
| 11 |
王勋, 姚佩阳, 梅权. 多无人机协同运动目标搜索问题研究[J]. 电光与控制, 2016, 23 (8): 18- 22.
|
|
WANG X , YAO P Y , MEI Q . On multi-UAV cooperation for moving target searching[J]. Electronics Optics & Control, 2016, 23 (8): 18- 22.
|
| 12 |
AKSHYA J , PRIYADARSINI P L K . Graph-based path planning for intelligent UAVs in area coverage applications[J]. Journal of Intelligent & Fuzzy Systems, 2020, 39 (6): 8191- 8203.
|
| 13 |
LI J D, LI X Q, YU L J. Multi-UAV cooperative coverage path planning in plateau and mountain environment[C]//Proc. of the 33rd Youth Academic Annual Conference of Chinese Association of Automation, 2018: 820-824.
|
| 14 |
XIAO S C , TAN X J , WANG J P . A simulated annealing algorithm and grid map-based UAV coverage path planning method for 3D reconstruction[J]. Electronics, 2021, 10 (7): 853- 868.
doi: 10.3390/electronics10070853
|
| 15 |
YUAN J B , LIU Z B , LIAN Y D , et al. Global optimization of UAV area coverage path planning based on good point set and genetic algorithm[J]. Aerospace, 2022, 9 (2): 86- 104.
doi: 10.3390/aerospace9020086
|
| 16 |
SANTIN R , ASSIS L , VIVAS A , et al. Matheuristics for multi-UAV routing and recharge station location for complete area coverage[J]. Sensors, 2021, 21 (5): 1705- 1738.
doi: 10.3390/s21051705
|
| 17 |
MURRAY C C , CHU A G . The flying sidekick traveling salesman problem: optimization of drone-assisted parcel delivery[J]. Transportation Research Part C: Emerging Technologies, 2015, (54): 86- 109.
|
| 18 |
MANYAM S G, CASBEER D W, SUNDAR K. Path planning for cooperative routing of air-ground vehicles[C]//Proc. of the American Control Conference, 2016: 4630-4635.
|
| 19 |
DENG C , WANG S W , HUANG Z , et al. Unmanned aerial vehicles for power line inspection: a cooperative way in platforms and communications[J]. Communication, 2014, 9 (9): 687- 692.
|
| 20 |
MOSHREF J M , WINKENBACH M . Applications and research avenues for drone-based models in logistics: a classification and review[J]. Expert Systems with Applications, 2021, 177, 114854.
|
| 21 |
AGATZ N , BOUMAN P , SCHMIDT M . Optimization approaches for the traveling salesman problem with drone[J]. Transportation Science, 2018, 52 (4): 965- 981.
|
| 22 |
LIU Y , LIU Z , SHI J M , et al. Two-echelon routing problem for parcel delivery by cooperated truck and drone[J]. IEEE Trans.on Systems, Man, Cybernetics: Systems, 2021, 51 (12): 7450- 7465.
|
| 23 |
GONZALEZ R P L , CANCA D , ANDRADE-PINEDA J L , et al. Truck-drone team logistics: a heuristic approach to multi-drop route planning[J]. Transportation Research Part C: Emerging Technologies, 2020, 114, 657- 680.
|
| 24 |
OTTO A , AGATZ N , CAMPBELL J , et al. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: a survey[J]. Networks, 2018, 72 (4): 411- 458.
|
| 25 |
MACRINA G , PUGLIESE L D P , GUERRIERO F , et al. Drone-aided routing: a literature review[J]. Transportation Research Part C: Emerging Technologies, 2020, 120, 102762- 102813.
|
| 26 |
CHUNG S H , SAH B , LEE J . Optimization for drone and drone-truck combined operations: a review of the state of the art and future directions[J]. Computers & Operations Research, 2020, 123, 105004- 105083.
|
| 27 |
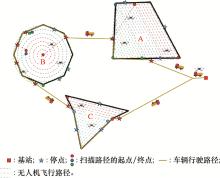
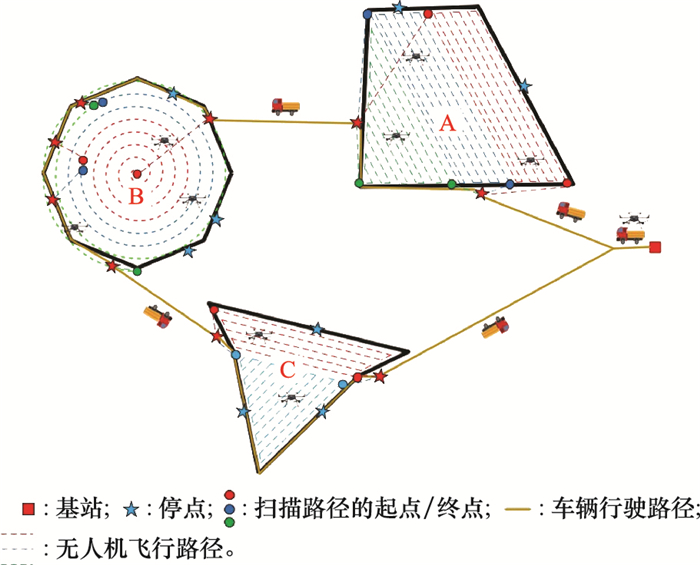
夏阳升, 石建迈, 陈超, 等. 车机协同多区域覆盖侦察路径规划方法[J]. 指挥与控制学报, 2020, 6 (4): 372- 380.
|
|
XIA Y S , SHI J M , CHEN C , et al. Path planning method for multi-area reconnaissance by cooperated ground vehicle and drone[J]. Journal of Command and Control, 2020, 6 (4): 372- 380.
|
| 28 |
CLARKE G , WRIGHT J W . Scheduling of vehicles from a central depot to a number of delivery points[J]. Operations Research, 1964, 12 (4): 568- 581.
|
| 29 |
STEINBRUNN M , MOERKOTTE G , KEMPER A . Heuristic and randomized optimization for the join ordering problem[J]. The International Journal on Very Large Data Bases, 1997, 6 (3): 191- 208.
|
| 30 |
夏桂梅, 曾建潮. 一种基于轮盘赌选择遗传算法的随机微粒群算法[J]. 计算机工程与科学, 2007, 29 (6): 51- 54.
|
|
XIA G M , ZENG J C . A stochastic particle swarm optimization algorithm based on the genetic algorithm of roulette wheel selection[J]. Computer Engineering & Science, 2007, 29 (6): 51- 54.
|