
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (4): 1098-1110.doi: 10.12305/j.issn.1001-506X.2023.04.18
• 系统工程 • 上一篇
韩维1, 刘子玄1, 苏析超1,*, 崔凯凯2, 刘洁3
收稿日期:2022-01-13
出版日期:2023-03-29
发布日期:2023-03-28
通讯作者:
苏析超
作者简介:韩维 (1970—), 男, 教授, 博士, 主要研究方向为舰载航空保障、舰载机动力学Wei HAN1, Zixuan LIU1, Xichao SU1,*, Kaikai CUI2, Jie LIU3
Received:2022-01-13
Online:2023-03-29
Published:2023-03-28
Contact:
Xichao SU
摘要:
舰载机甲板调运是机群全周期出动回收作业的关键环节, 为提高舰载机调运效率, 以得到满足运动学及终端位姿约束的最优路径为目标, 结合启发式与最优控制方法, 进行舰载机甲板路径规划研究。首先, 针对甲板复杂布列环境建立凸壳障碍膨胀模型。其次, 在A*算法中引入动态衡量因子, 设计轨迹重搜索算法, 求解最短路径关键点。最后, 解算关键点运动状态, 结合最优控制算法, 对关键点间分段路径进行规划与整合。开展典型甲板环境下的路径规划仿真实验, 通过与最优控制算法仿真实验结果相比较, 验证所提算法的优越性。仿真实验结果表明, 所提算法有效解决了最优控制算法在复杂障碍环境下初值敏感性问题并有效提升了甲板调运的优化性能。
中图分类号:
韩维, 刘子玄, 苏析超, 崔凯凯, 刘洁. 结合启发式与最优控制的舰载机甲板路径规划算法[J]. 系统工程与电子技术, 2023, 45(4): 1098-1110.
Wei HAN, Zixuan LIU, Xichao SU, Kaikai CUI, Jie LIU. Deck path planning algorithm of carrier-based aircraft based on heuristic and optimal control[J]. Systems Engineering and Electronics, 2023, 45(4): 1098-1110.

图1
航母甲板功能区域划分"

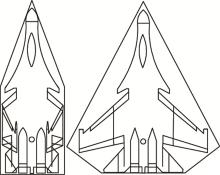
图2
舰载机凸壳模型"
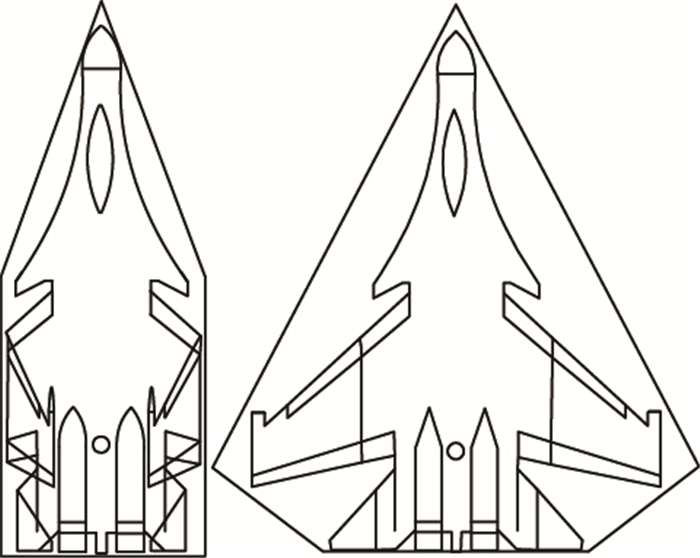
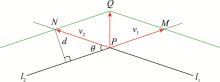
图3
多边形扩张算法示意图"
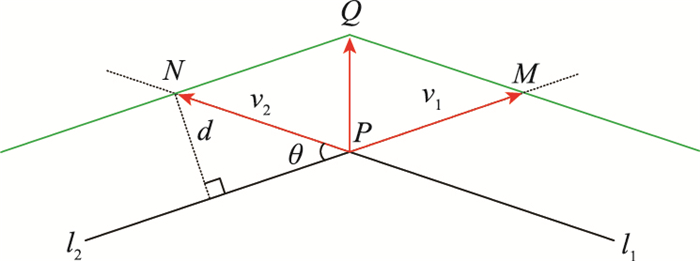
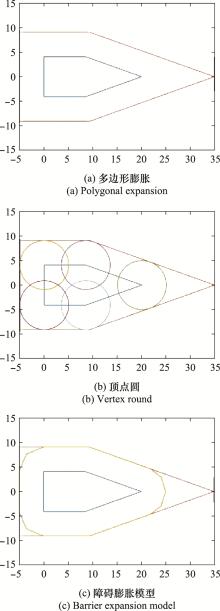
图4
凸壳模型膨胀过程"
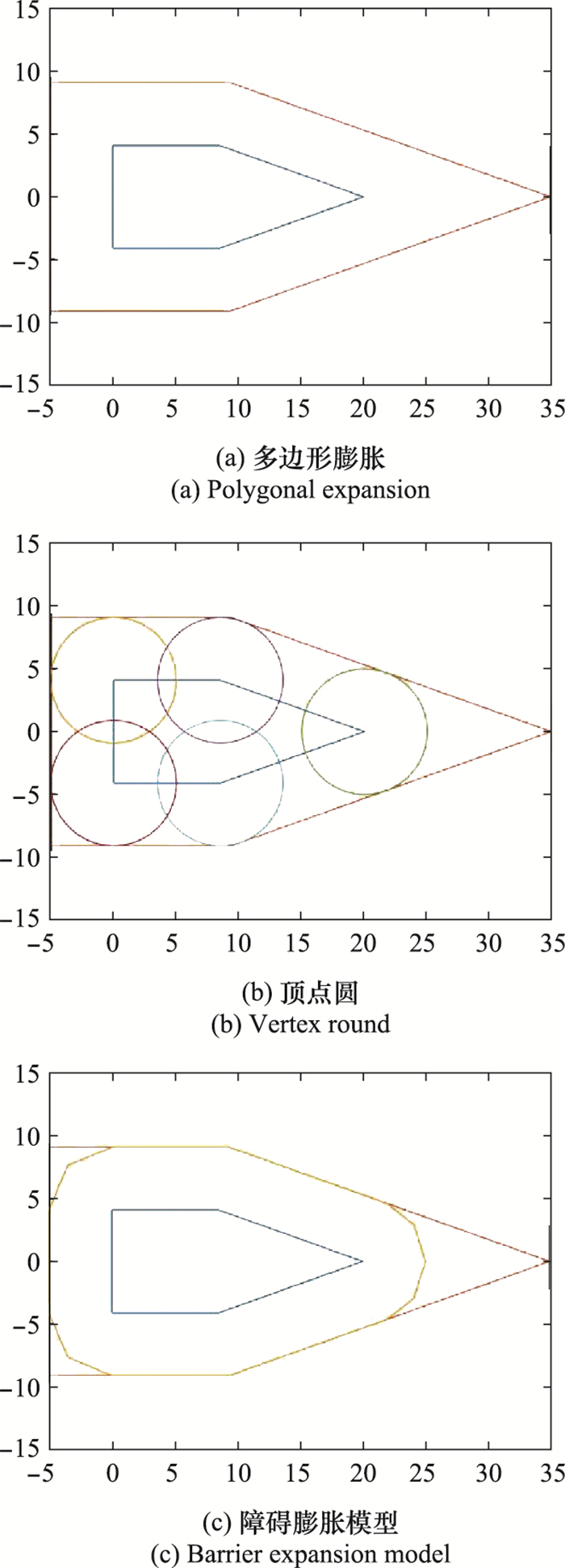
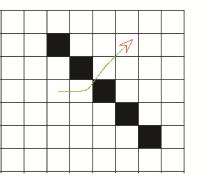
图5
路径穿越连续斜障碍示意图"


图6
动态衡量优化前搜索范围(红)"


图7
动态衡量优化后搜索范围(红)"

图8
重搜索优化前后轨迹示意图"
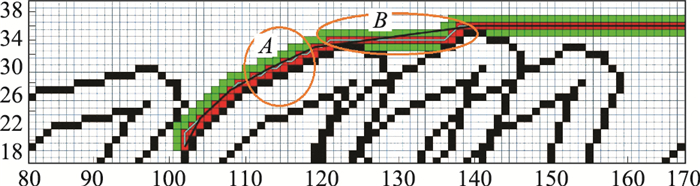

图9
基于改进A*算法的舰载机路径规划"
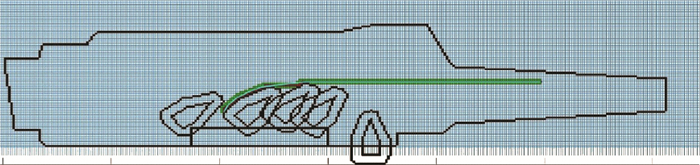
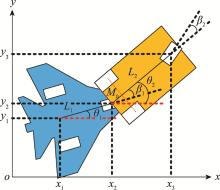
图10
无杆牵引系统的运动关系图"

图11
关键点运动学解算"
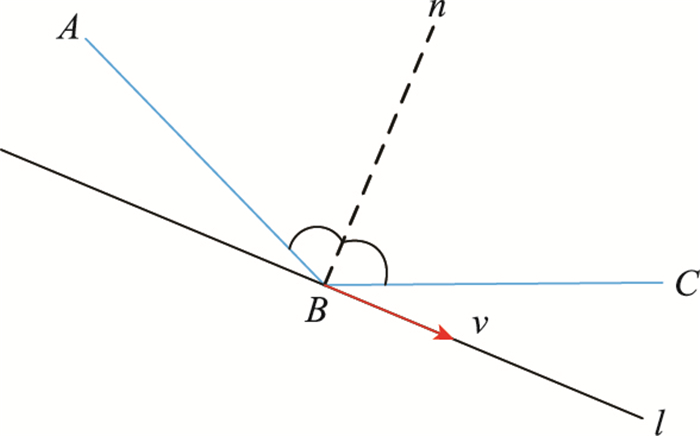

图12
场景1最优控制算法路径规划图"
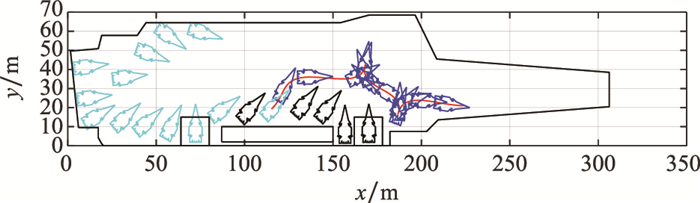
表1
场景1障碍参数"
| 障碍编号 | 参数 | |||
| xoi | yoi | ai+d | bi+d | |
| 1 | 105 | 15 | 10 | 20 |
| 2 | 132 | 15 | 8 | 20 |
| 3 | 150 | 15 | 10 | 20 |
| 4 | 155 | 12 | 6 | 15 |
| 5 | 170 | 10 | 10 | 13 |
表2
场景1仿真实验结果对比"
| 算法名称 | t/s | max (arctan(|u1|))/(°) | u2波动次数 | v2阶跃次数 |
| 最优控制算法 | 132 | 40 | 4 | 4 |
| 结合改进A*算法与最优控制算法 | 121 | 22 | 2 | 2 |
| 优化结果 | 缩短8.3% | 缩减45%且曲线平缓 | 波动次数减少 | 阶跃次数减少 |

图13
场景1最优控制算法控制量及牵引车速度变化曲线"

图14
场景1结合改进A*算法与最优控制算法路径规划图"
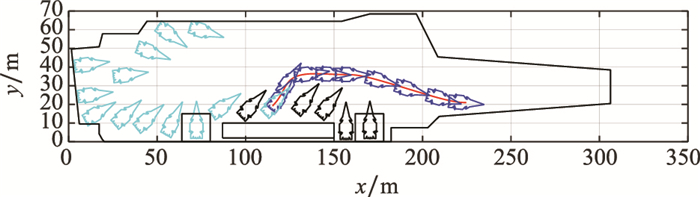

图15
场景1结合改进A*算法与最优控制算法控制量及牵引车速度变化曲线"
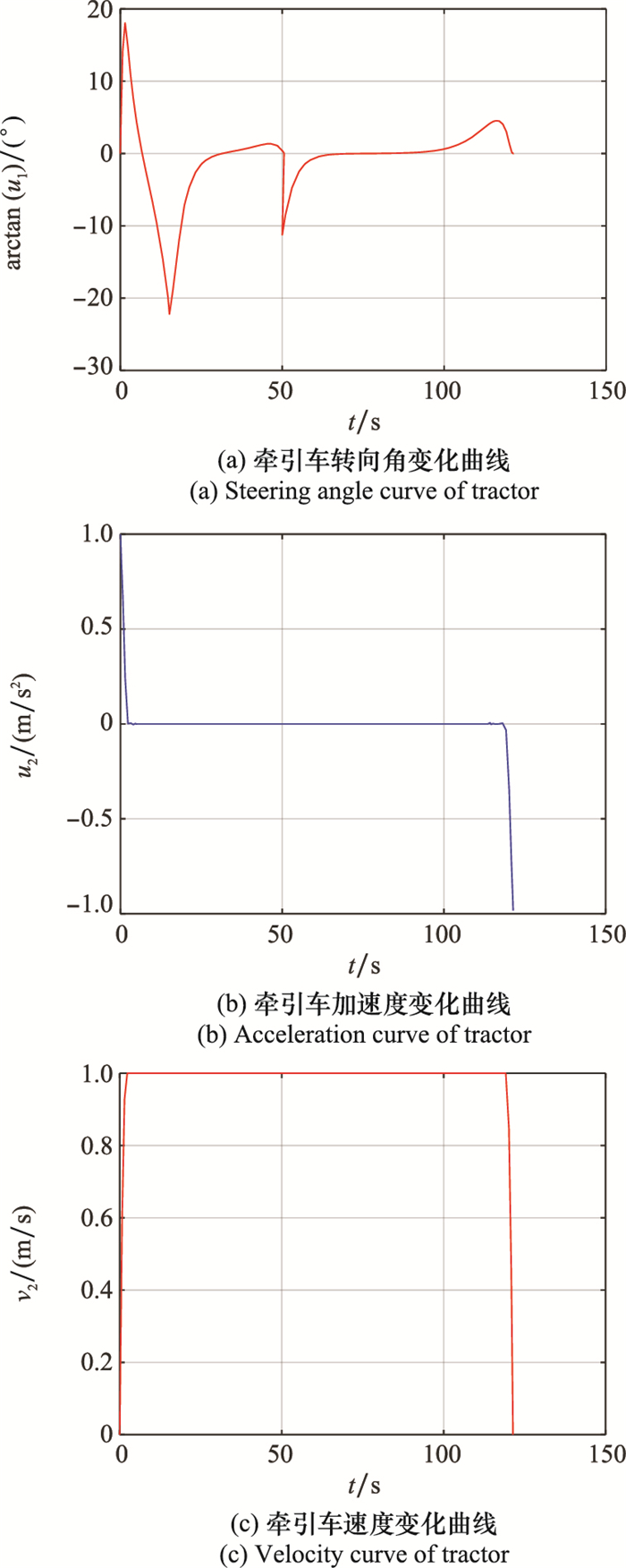
表3
场景2障碍参数"
| 障碍编号 | 参数 | |||
| xoi | yoi | ai+d | bi+d | |
| 1 | 73 | 10 | 10 | 13 |
| 2 | 105 | 15 | 10 | 20 |
| 3 | 120 | 15 | 10 | 20 |
| 4 | 132 | 15 | 8 | 20 |
| 5 | 150 | 15 | 10 | 20 |
| 6 | 155 | 12 | 6 | 15 |

图16
场景2最优控制算法路径规划图"


图17
场景2最优控制算法控制量及牵引车速度变化曲线"
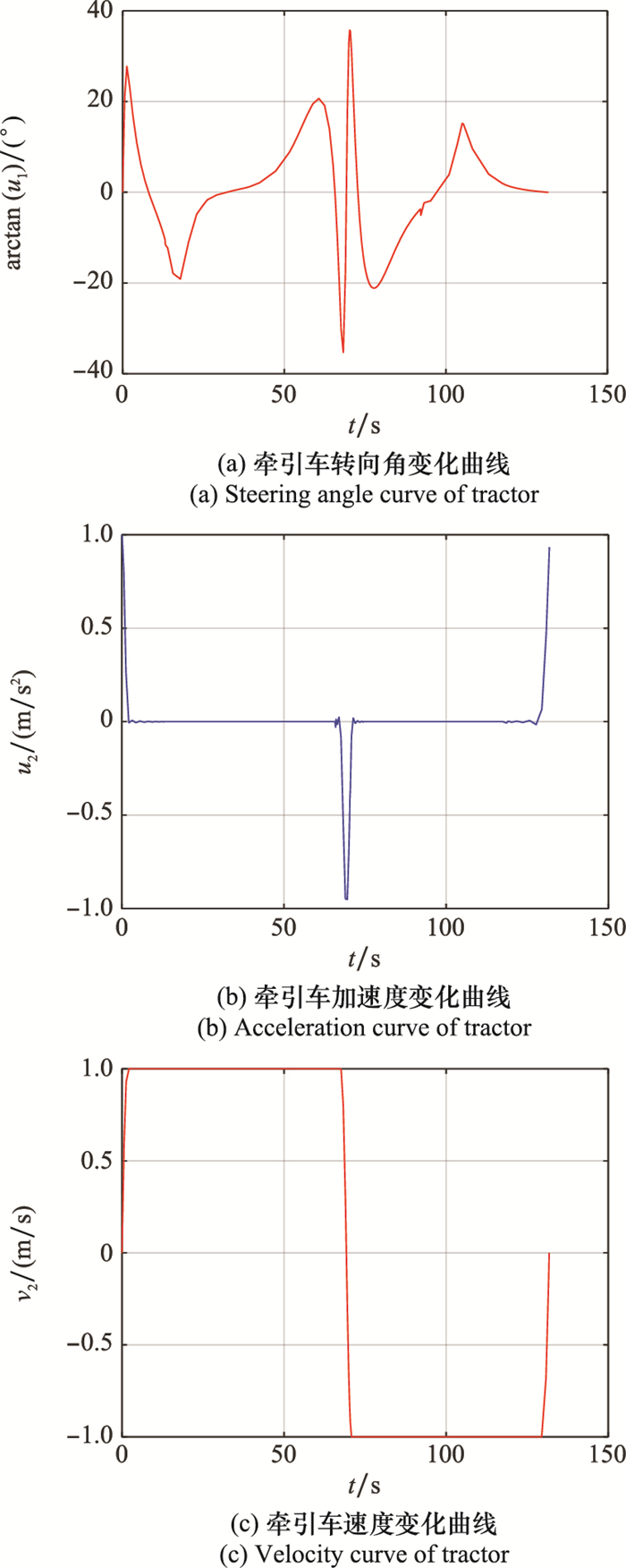
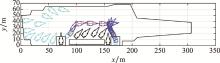
图18
场景2结合改进A*算法与最优控制算法的路径规划图"
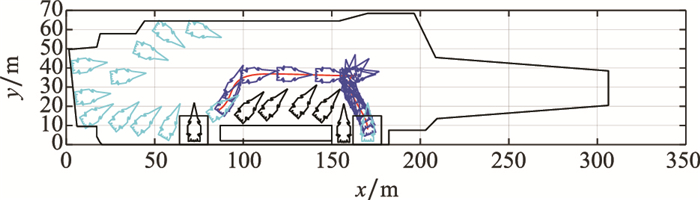
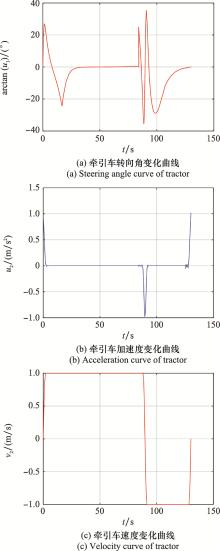
图19
场景2结合改进A*算法与最优控制算法控制量及牵引车速度变化曲线"
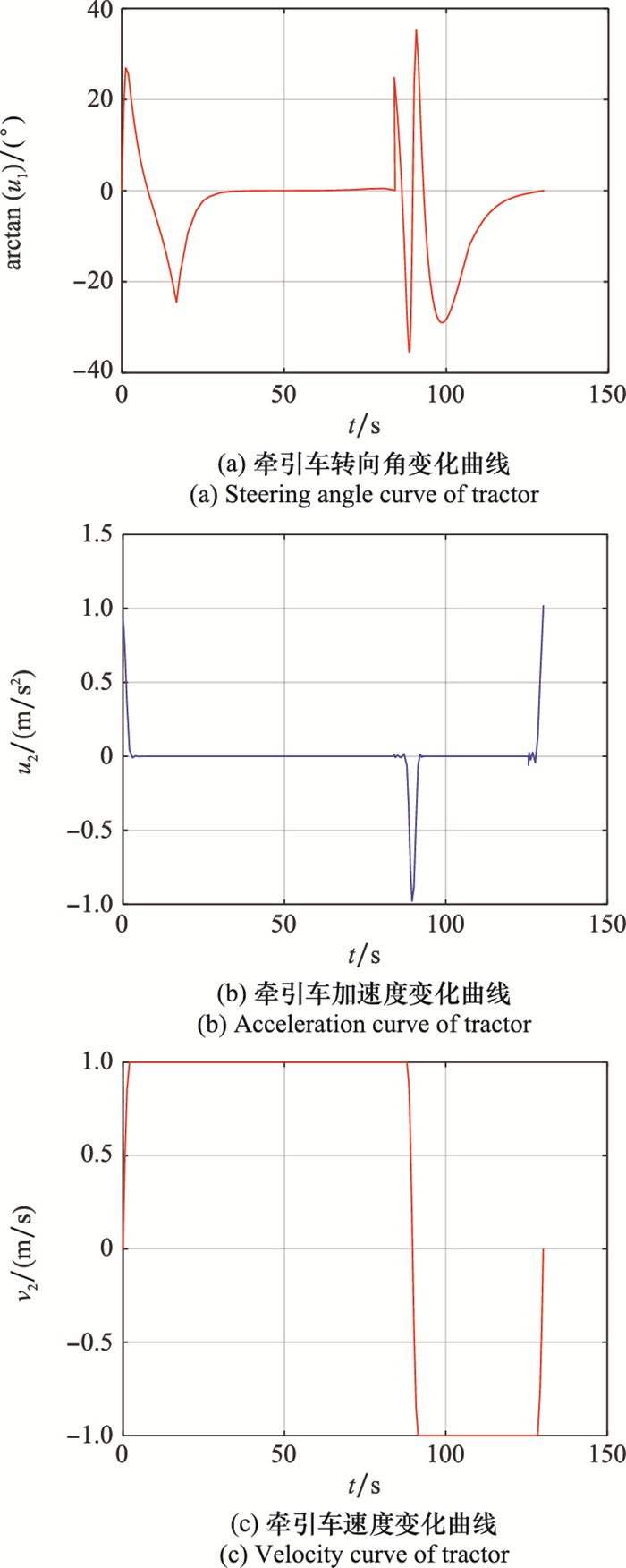
表4
场景2仿真实验结果对比"
| 算法名称 | t/s | max (arctan(|u1|))/(°) | u2波动次数 | v2阶跃次数 |
| 最优控制算法 | 131 | 38 | 3 | 3 |
| 结合改进A*算法与最优控制算法 | 130 | 37 | 3 | 3 |
| 优化结果 | 缩短0.8% | 减小2.6%且曲线平缓 | 一致 | 一致 |
表5
场景3障碍参数"
| 障碍编号 | 参数 | |||
| xoi | yoi | ai+d | bi+d | |
| 1 | 105 | 15 | 10 | 20 |
| 2 | 120 | 15 | 10 | 20 |
| 3 | 80 | 64 | 10 | 14 |
| 4 | 62 | 60 | 10 | 15 |
| 5 | 50 | 47 | 12 | 8 |
| 6 | 120 | 44 | 18 | 10 |
| 7 | 160 | 55 | 18 | 10 |
| 8 | 110 | 35 | 18 | 10 |

图20
场景3结合改进A*算法与最优控制算法路径规划图"
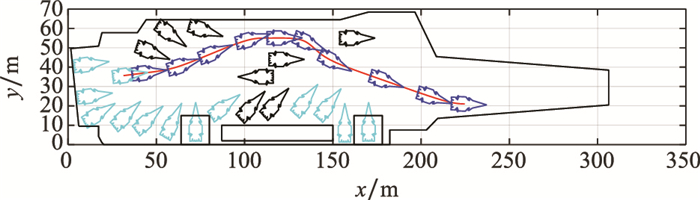

图21
场景3结合改进A*算法与最优控制算法控制量及牵引车速度变化曲线"
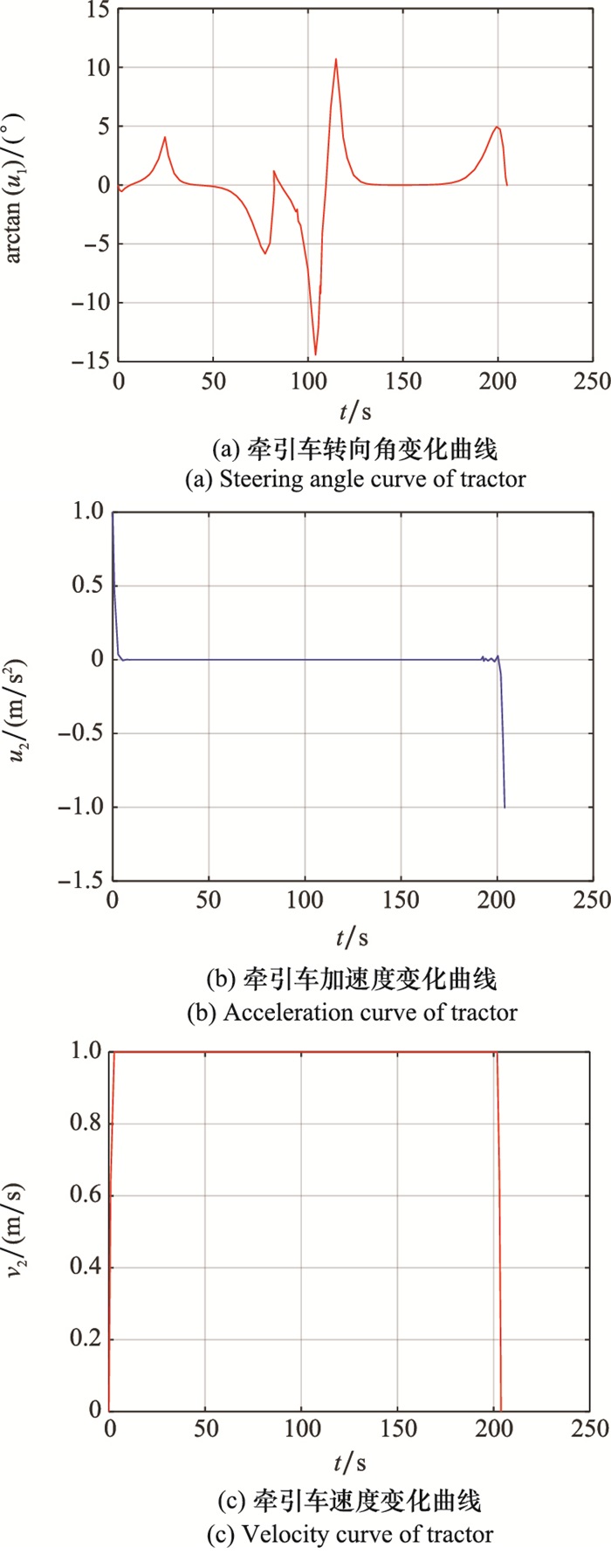

图22
舰载机甲板调运路径库"

| 1 |
WANG X W , LIU J , SU X C , et al. A review on carrier aircraft dispatch path planning and control on deck[J]. Chinese Journal of Aeronautics, 2020, 33 (12): 3039- 3057.
doi: 10.1016/j.cja.2020.06.020 |
| 2 | 张竞, 吴宇, 屈香菊. 舰载机牵引系统路径规划方法[J]. 北京航空航天大学学报, 2018, 44 (10): 2125- 2133. |
| ZHANG J , WU Y , QU X J . Path planning method for traction system on carrier aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44 (10): 2125- 2133. | |
| 3 | 张智, 林圣琳, 邱兵, 等. 舰载机牵引系统甲板调运避碰路径规划[J]. 系统工程与电子技术, 2014, 36 (8): 1551- 1557. |
| ZHANG Z , LIN S L , QIU B , et al. Collision avoidance path planning of carrier aircraft traction system in dispatching on deck[J]. Systems Engineering and Electronics, 2014, 36 (8): 1551- 1557. | |
| 4 | SI W C , SUN T , SONG C , et al. Design and verification of a transfer path optimization method for an aircraft on the aircraft carrier flight deck[J]. Frontiers of Information Technology & Electronic Engineering, 2021, 22 (9): 1221- 1233. |
| 5 |
WU Y , QU X J . Obstacle avoidance and path planning for carrier aircraft launching[J]. Chinese Journal of Aeronautics, 2015, 28 (3): 695- 703.
doi: 10.1016/j.cja.2015.03.001 |
| 6 | 刘洁, 董献洲, 韩维, 等. 采用牛顿迭代保辛伪谱算法的舰载机甲板路径规划[J]. 浙江大学学报(工学版), 2020, 54 (9): 1827- 1838. |
| LIU J , DONG X Z , HAN W , et al. Trajectory planning for carrier aircraft on deck using Newton symplectic pseudo-spectral method[J]. Journal of Zhejiang University (Engineering Science), 2020, 54 (9): 1827- 1838. | |
| 7 | 薛均晓, 孔祥燕, 郭毅博, 等. 基于深度强化学习的舰载机动态避障方法[J]. 计算机辅助设计与图形学学报, 2021, 33 (7): 1102- 1112. |
| XUE J X , KONG X Y , GUO Y B , et al. Dynamic obstacle avoidance method for carrier aircraft based on deep reinforcement learning[J]. Journal of Computer-Aided Design & Computer Graphics, 2021, 33 (7): 1102- 1112. | |
| 8 | 郑茂, 颜世伟, 初秀民, 等. 舰载机典型调运方案推演与时序优化[J]. 中国舰船研究, 2021, 16 (3): 1- 8.1-8, 23 |
| ZHENG M , YAN S W , CHU X M , et al. Handling scheme simulation and scheduling optimizationfor carrier-borne aircraft[J]. Chinese Journal of Ship Research, 2021, 16 (3): 1- 8.1-8, 23 | |
| 9 | 张智, 林圣琳, 夏桂华, 等. 舰载机甲板调运过程避碰路径规划研究[J]. 哈尔滨工程大学学报, 2014, 35 (1): 9- 15. |
| ZHANG Z , LIN S L , XIA G H , et al. Collision avoidance path planning foran aircraft in scheduling process on deck[J]. Journal of Harbin Engineering University, 2014, 35 (1): 9- 15. | |
| 10 | WANG X W , PENG H J , LIU J , et al. Optimal control based coordinated taxiing path planning and tracking for multiple carrier aircraft on flight deck[J]. Defence Technology, 2022, 18 (2): 238- 248. |
| 11 | TZAFESTAS S G . Mobile robot control and navigation: a global overview[J]. Journal of Intelligent & Robotic Systems, 2018, 91 (1): 35- 58. |
| 12 | SARIFF N, BUNIYAMIN N. An overview of autonomous mobile robot path planning algorithms[C]//Proc. of the IEEE 4th Student Conference on Research and Development, 2006: 183-188. |
| 13 | TEIMOORI H , SAVKIN A V . A biologically inspired method for robot navigation in a cluttered environment[J]. Robotica, 2010, 28 (5): 637- 648. |
| 14 | YU M H , XUE G , FAN G W , et al. Trajectory planning and tracking for carrier aircraft-tractor system based on autonomous and cooperative movement[J]. Mathematical Problems in Engineering, 2020, 2020, 6531984. |
| 15 | FAN K C , LUI P C . Solving find path problem in mapped environments using modified A* algorithm[J]. IEEE Trans.on Systems, Man, and Cybernetics, 1994, 24 (9): 1390- 1396. |
| 16 | WARREN C W. Fast path planning using modified A* method[C]//Proc. of the IEEE International Conference on Robotics and Automation, 1993: 662-667. |
| 17 | 孙小雷, 齐乃明, 董程, 等. 无人机任务分配与航迹规划协同控制方法[J]. 系统工程与电子技术, 2010, 37 (12): 2772- 2776. |
| SUN X L , QI N M , DONG C , et al. Cooperative control algorithm of task assignment and path planning for multiple UAVs[J]. Systems Engineering and Electronics, 2010, 37 (12): 2772- 2776. | |
| 18 | 张哲, 吴剑, 代冀阳, 等. 基于改进A* Star算法的隐身无人机快速突防航路规划[J]. 航空学报, 2020, 41 (7): 254- 264. |
| ZHANG Z , WU J , DAI J Y , et al. Fast penetration path planning for stealth UAV based on improved A* Star algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (7): 254- 264. | |
| 19 | WU Y , QU X J . Path planning for taxi of carrier aircraft launching[J]. Science China Technological Sciences, 2013, 56 (6): 1561- 1570. |
| 20 | XUE J X, KONG X Y, DONG B W, et al. Multi-agent path planning based on MPC and DDPG[EB/OL]. [2022-01-05]. https://arxiv.org/abs/2102.13283v1. |
| 21 | YE B Q, ZHAO M F, WANG Y. Research of path planning method for mobile robot based on artificial potential field[C]//Proc. of the International Conference on Multimedia Technology, 2011: 3192-3195. |
| 22 | HUANG W H , FAJEN B R , FINK J R , et al. Visual navigation and obstacle avoidance using a steering potential function[J]. Robotics and Autonomous Systems, 2006, 54 (4): 288- 299. |
| 23 | YAO Z X, YAO Z Y, WANG W H, et al. The enemy air-threat prediction based aircraft real-time path planning for offshore combat[C]//Proc. of the IEEE 8th International Conference on Underwater System Technology: Theory and Applications, 2018. |
| 24 | LIU J , HAN W , WANG X W , et al. Research on cooperative trajectory planning and tracking problem for multiple carrier aircraft on the deck[J]. IEEE Systems Journal, 2019, 14 (2): 3027- 3038. |
| 25 | WU Y , HU N , QU X J . A general trajectory optimization method for aircraft taxiing on flight deck of carrier[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233 (4): 1340- 1353. |
| 26 |
崔凯凯, 韩维, 刘玉杰, 等. 基于DM-DSC的舰载机着舰自动复飞控制算法[J]. 北京航空航天大学学报, 2022,
doi: 10.13700/j.bh.1001-5965.2021.0362 |
|
CUI K K , HAN W , LIU Y J , et al. Automatic wave-off control method for carrier aircraft based on DM-DSC[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022,
doi: 10.13700/j.bh.1001-5965.2021.0362 |
|
| 27 | 乔鸿, 徐忠达, 佘智勇. 基于Radau伪谱法的临近空间飞行器助推-滑翔段轨迹优化仿真[J]. 战术导弹技术, 2017, 43 (4): 47- 51. |
| QIAO H , XU Z D , SHE Z Y . Boost-glide trajectory optimization for near space vehicle using radau pseudospectral method[J]. Tactical Missile Technology, 2017, 43 (4): 47- 51. | |
| 28 | 蔡伟伟. 空天飞行器轨迹规划与控制研究[D]. 长沙: 国防科学技术大学, 2015. |
| CAI W W. Trajectory planning and control for aerospace vehicles[D]. Changsha: National University of Defense Technology, 2015. |
| [1] | 吕晓峰, 杨东泽, 马羚. 舰载机模块化弹药调度方案优化设计[J]. 系统工程与电子技术, 2023, 45(2): 465-471. |
| [2] | 张浩杰, 张玉东, 梁荣敏, 杨甜甜. 改进A*算法的机器人能耗最优路径规划方法[J]. 系统工程与电子技术, 2023, 45(2): 513-520. |
| [3] | 任智, 张栋, 唐硕. 基于强化学习的改进三维A*算法在线航迹规划[J]. 系统工程与电子技术, 2023, 45(1): 193-201. |
| [4] | 张勇, 李常久, 苏析超, 崔荣伟. 基于HTLBO算法的舰载机机群机库维修任务调度[J]. 系统工程与电子技术, 2022, 44(9): 2858-2868. |
| [5] | 冯豪博, 胡桥, 赵振轶. 基于精英族系遗传算法的AUV集群路径规划[J]. 系统工程与电子技术, 2022, 44(7): 2251-2262. |
| [6] | 尹洋, 杨全顺, 王征, 刘洋. 通信距离约束下的无人船集群覆盖搜索方法[J]. 系统工程与电子技术, 2022, 44(12): 3821-3828. |
| [7] | 邓嘉宁, 吴宇, 许舒婷, 苟进展. 基于模糊贝叶斯-ANP舰载机出动回收综合评估[J]. 系统工程与电子技术, 2022, 44(11): 3423-3432. |
| [8] | 杨清清, 高盈盈, 郭玙, 夏博远, 杨克巍. 基于深度强化学习的海战场目标搜寻路径规划[J]. 系统工程与电子技术, 2022, 44(11): 3486-3495. |
| [9] | 韩维, 崔凯凯, 刘洁, 王昕炜, 张勇. 基于自校正MPC的舰载机着舰控制技术[J]. 系统工程与电子技术, 2022, 44(1): 250-261. |
| [10] | 马威强, 高永琪, 赵苗. 基于全局最优和差分变异的头脑风暴优化算法[J]. 系统工程与电子技术, 2022, 44(1): 270-278. |
| [11] | 曾斌, 陈媛媛, 李厚朴. 考虑保障装备可用度的舰载机作业调度优化[J]. 系统工程与电子技术, 2021, 43(7): 1856-1865. |
| [12] | 崔荣伟, 韩维, 苏析超, 王立国, 刘玉杰. 舰载机甲板机务勤务保障作业调度与资源配置集成优化[J]. 系统工程与电子技术, 2021, 43(7): 1884-1893. |
| [13] | 焦志强, 张杰勇, 姚佩阳, 王勋, 何宜超. 基于分层结构的C4ISR服务部署分布式演化方法[J]. 系统工程与电子技术, 2021, 43(6): 1572-1585. |
| [14] | 郭建国, 苏亚鲁. 高超飞行器自适应动态规划的控制系统设计[J]. 系统工程与电子技术, 2021, 43(6): 1628-1635. |
| [15] | 万兵, 韩维, 梁勇, 郭放. 舰载机出动离场调度优化算法[J]. 系统工程与电子技术, 2021, 43(12): 3624-3634. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||