
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (1): 185-197.doi: 10.12305/j.issn.1001-506X.2026.01.17
单晨宇1,2, 李少凡1,2, 齐瑞云1,2,*( )
)
收稿日期:2023-09-06
出版日期:2026-01-25
发布日期:2026-02-11
通讯作者:
齐瑞云
E-mail:ruiyun.qi@nuaa.edu.cn
作者简介:单晨宇(1998—),男,硕士研究生,主要研究方向为多智能体任务分配、路径规划基金资助:
Chenyu SHAN1,2, Shaofan LI1,2, Ruiyun QI1,2,*()
Received:2023-09-06
Online:2026-01-25
Published:2026-02-11
Contact:
Ruiyun QI
E-mail:ruiyun.qi@nuaa.edu.cn
摘要:
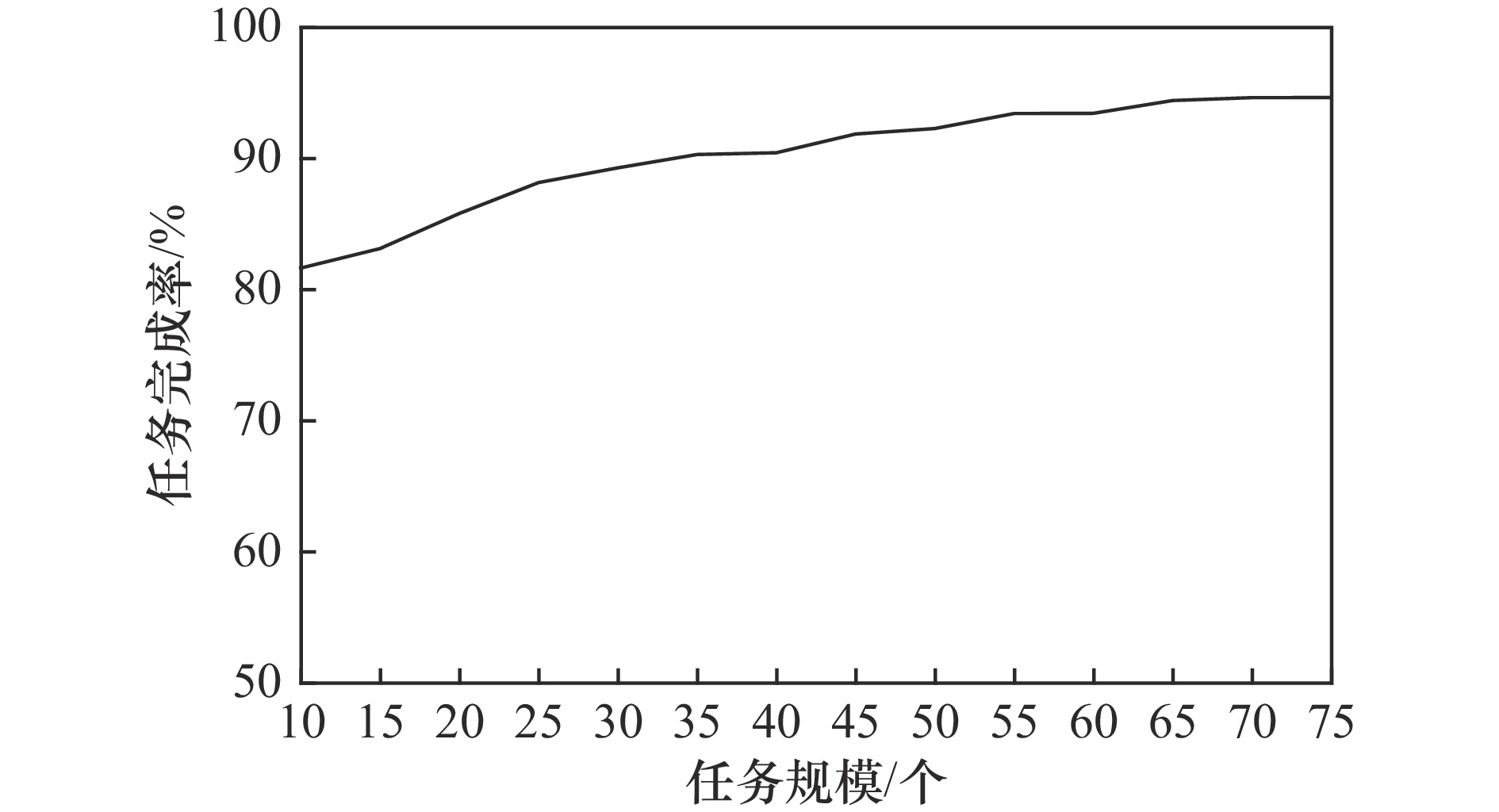
为解决在执行任务过程中部分智能体可能会发生故障,无法完成预定的任务分配方案,需要进行任务重分配的问题,提出一种具有虚拟管理者基于共识的捆绑算法的局部重分配方法。首先,引入基于时序的任务优先级排序方法,提高资源利用率。然后,基于K均值聚类方法,将大规模任务场景划分为多个小规模任务组,减少任务重分配求解时间。最后,仿真实验验证所提方法的有效性。与基于共识的捆绑算法的全局重分配方法进行对比,所提该方法在大规模场景下具有更好的实时性。随着任务规模的扩大,采用该方法进行任务重分配的任务完成率上升。
中图分类号:
单晨宇, 李少凡, 齐瑞云. 多智能体系统故障临机处理下的快速任务重分配[J]. 系统工程与电子技术, 2026, 48(1): 185-197.
Chenyu SHAN, Shaofan LI, Ruiyun QI. Fast task reassignment in multi-agent system emergency fault handling[J]. Systems Engineering and Electronics, 2026, 48(1): 185-197.
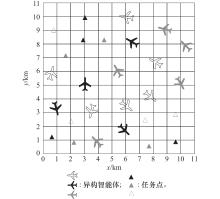
图1
智能体与任务二维关系示意图"
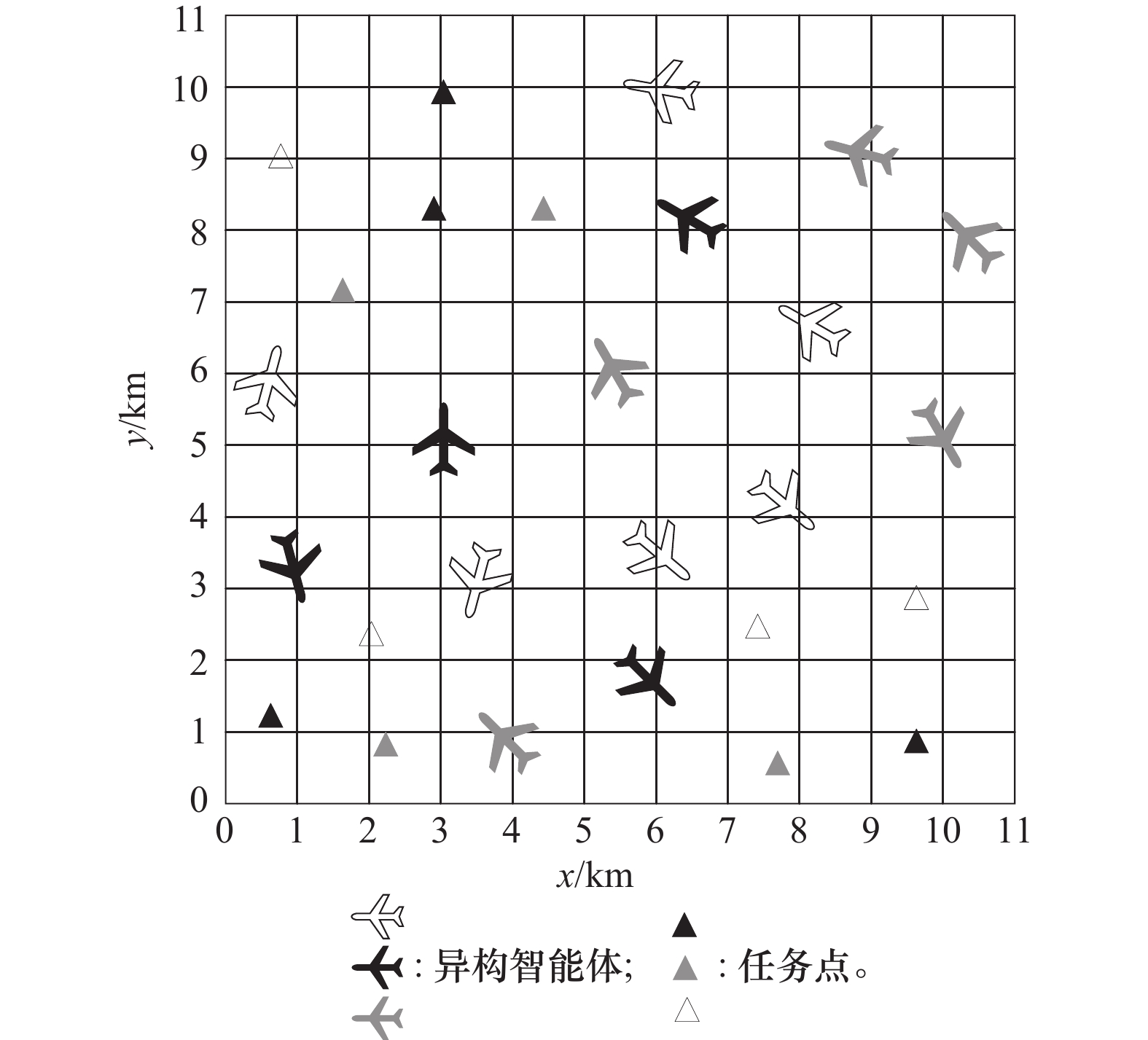
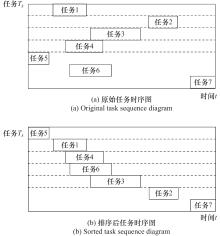
图2
基于时序的任务重排序示意图"
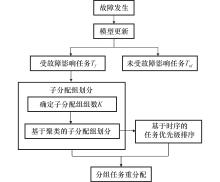
图3
故障临机处理流程图"
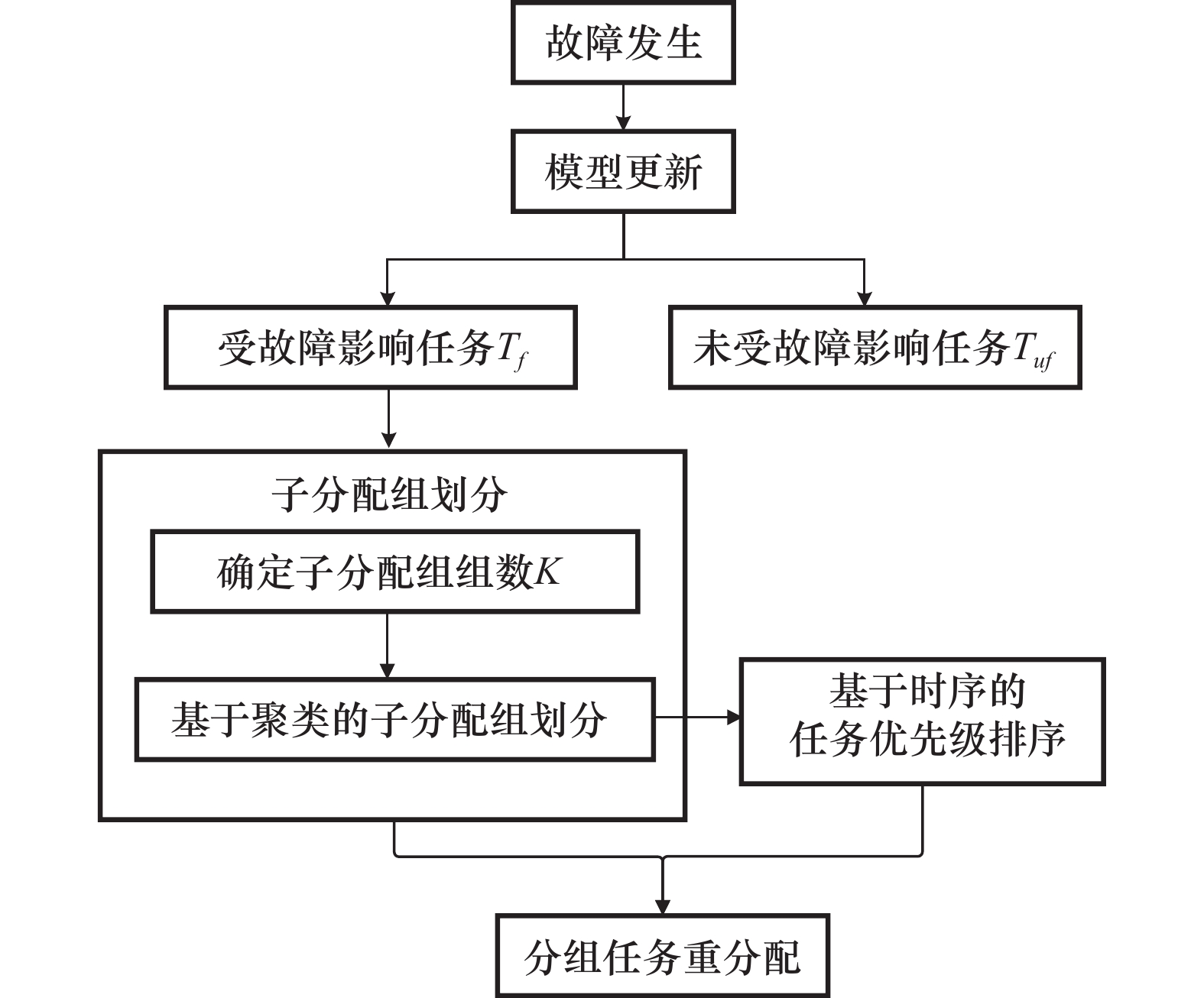
图4
CBBA-VMLR算法流程图"
表1
虚拟管理者在共识阶段的冲突消解策略"
| 发送方 | 接收方 | 接收方行为(默认:保持) |
| 若 | ||
| 更新 | ||
| 若 | ||
| 更新 | ||
| 保持 | ||
| 重置 | ||
| 若 | ||
| 保持 | ||
| 若 | ||
| 若 | ||
| m | 若 | |
| 若 | ||
| 若 | ||
| 若 | ||
| 若 | ||
| 保持 | ||
| 更新 | ||
| 若 | ||
| 保持 |
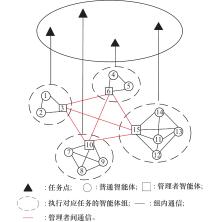
图5
多智能体系统工作时拓扑结构示意图"
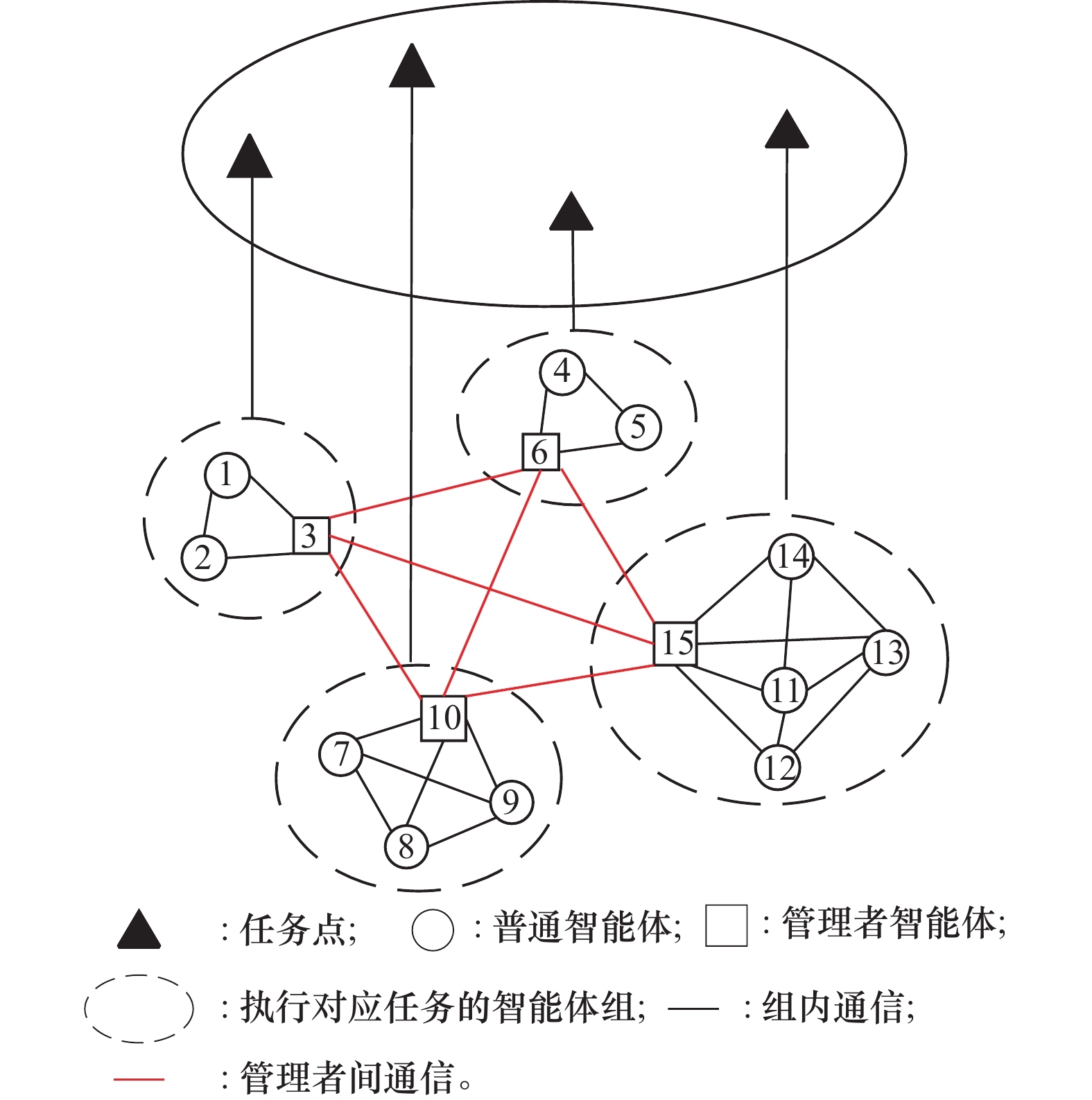
图6
目标任务二维区域内分布"
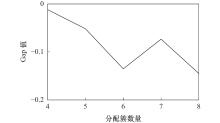
图7
Gap值计算结果"
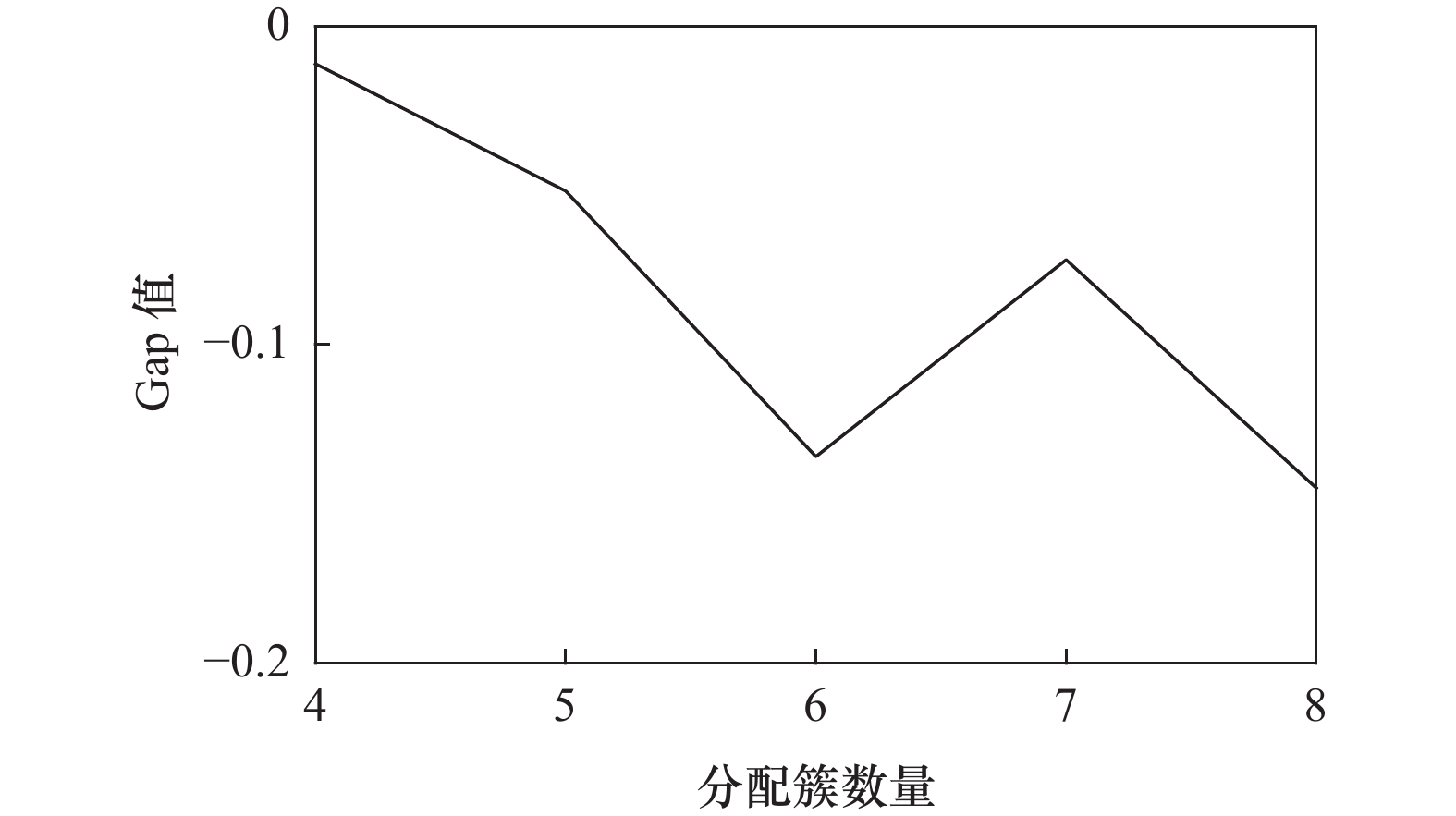
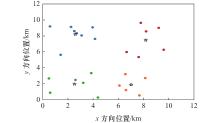
图8
故障任务重分配分配簇分组结果"
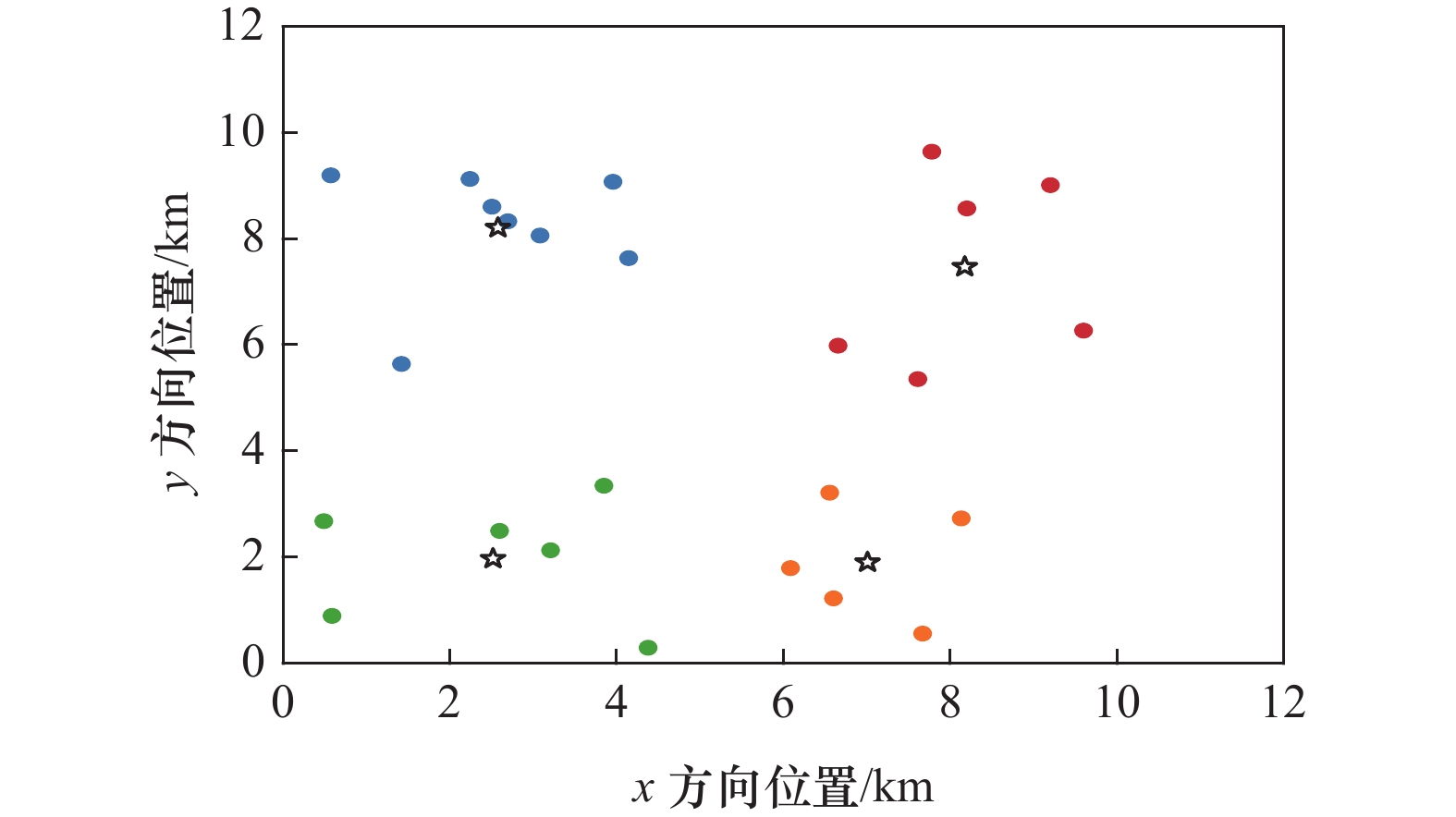
表2
任务场景随机生成参数表"
| 参数 | 参数值 |
| 任务区域/km2 | 100 ×100 |
| 任务数量 | 10~15, 15~20, 30~35, 45~50 |
| 时间窗大小Δ/min | 10 ~20 |
| 性能类型 | 3 |
| 智能体类型 | 3 |
| 总智能体数量 | 3~6倍任务数 |
| 智能体速度/ms-1 | 25, 30, 40 |
| 智能体故障比例/% | 8~15 |
| 时间衰减系数 | 0.05 |
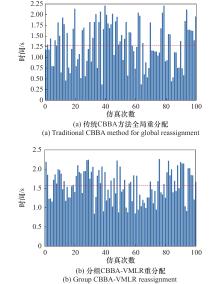
图9
任务规模1下两种算法的时间表现"
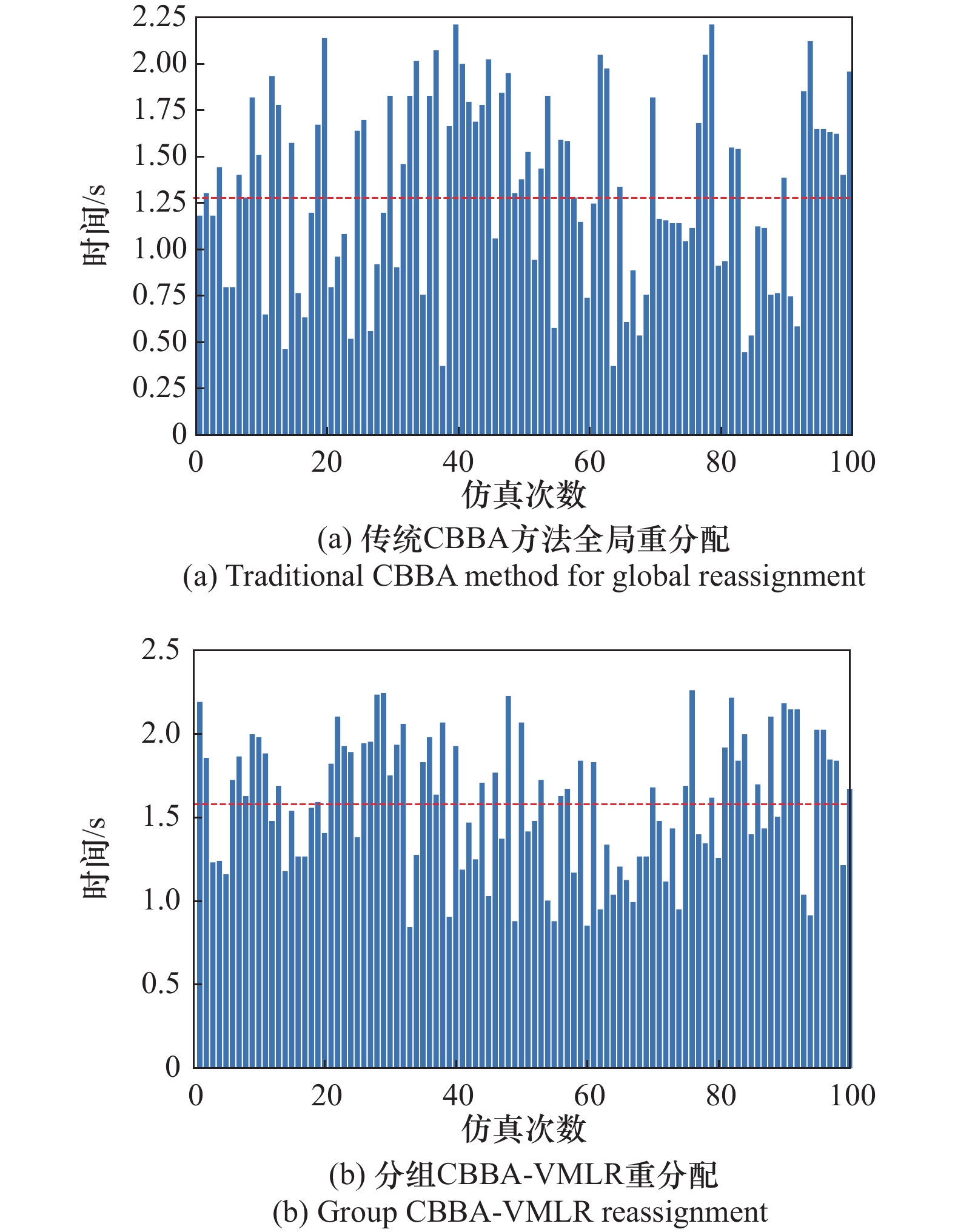
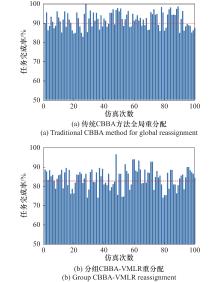
图10
任务规模1下两种算法的任务完成率表现"
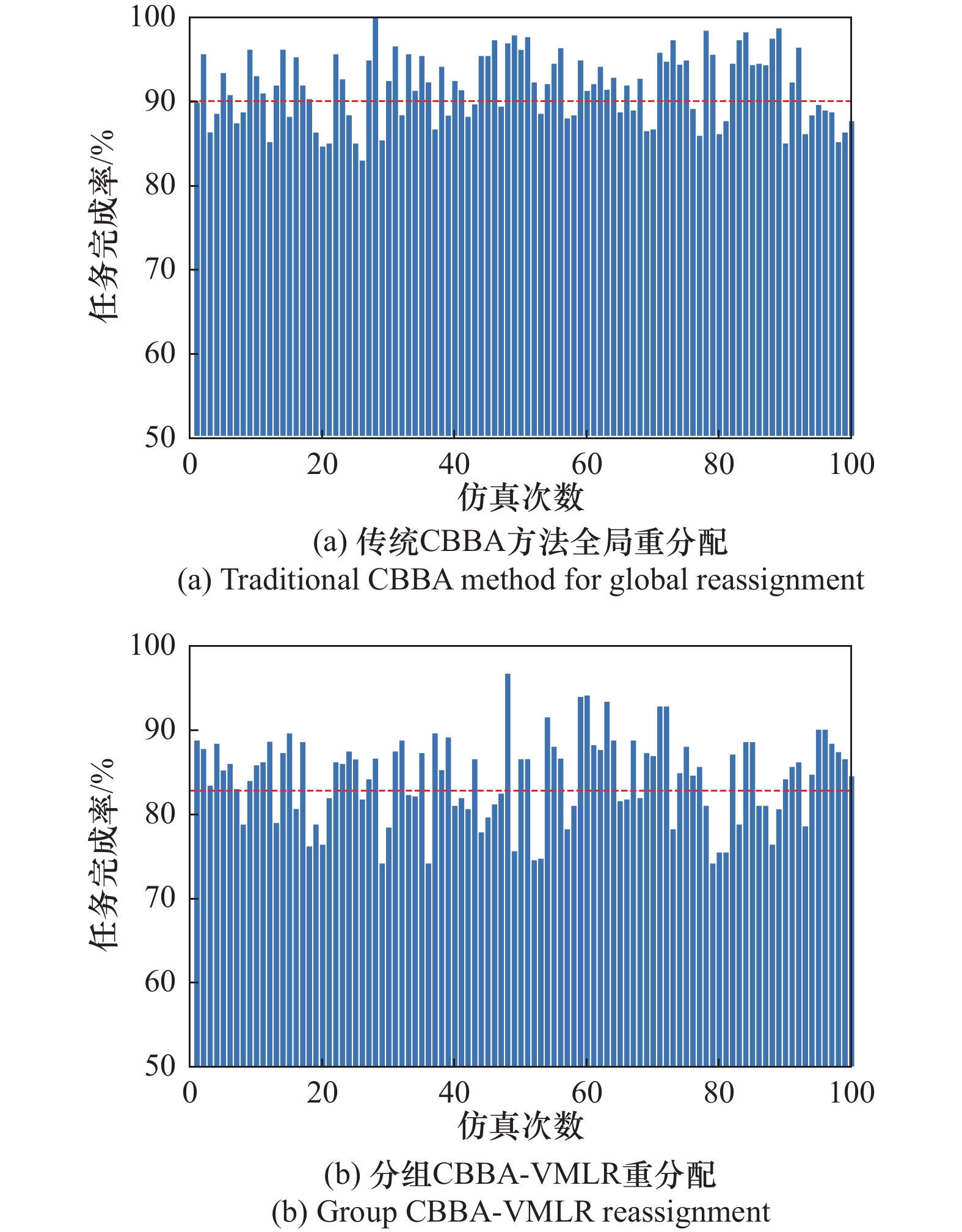
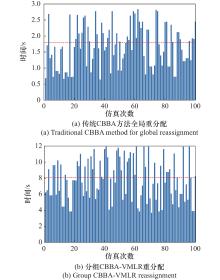
图11
任务规模2下两种算法的时间表现"
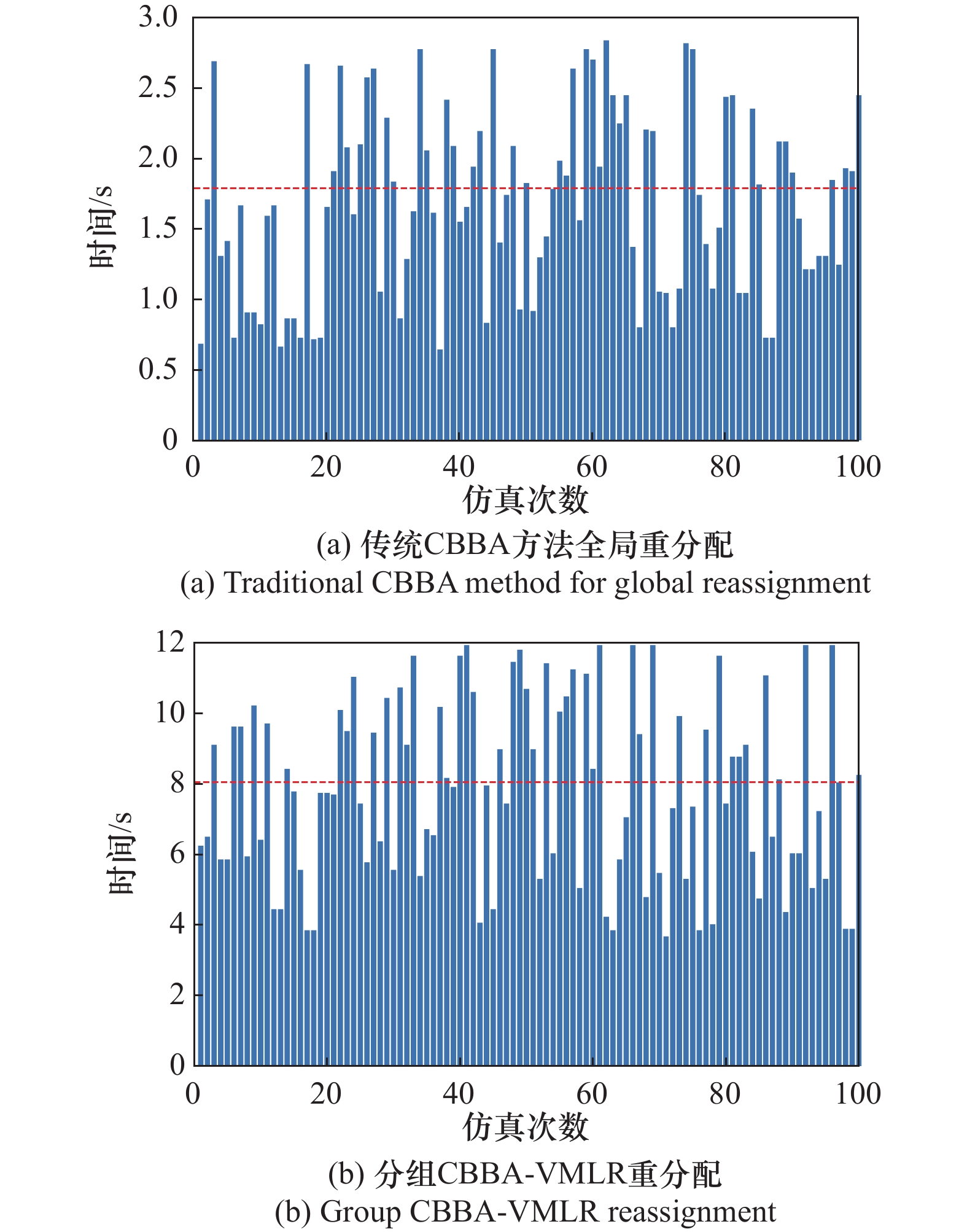
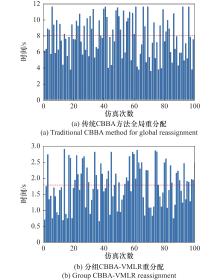
图12
任务规模2下两种算法的任务完成率表现"
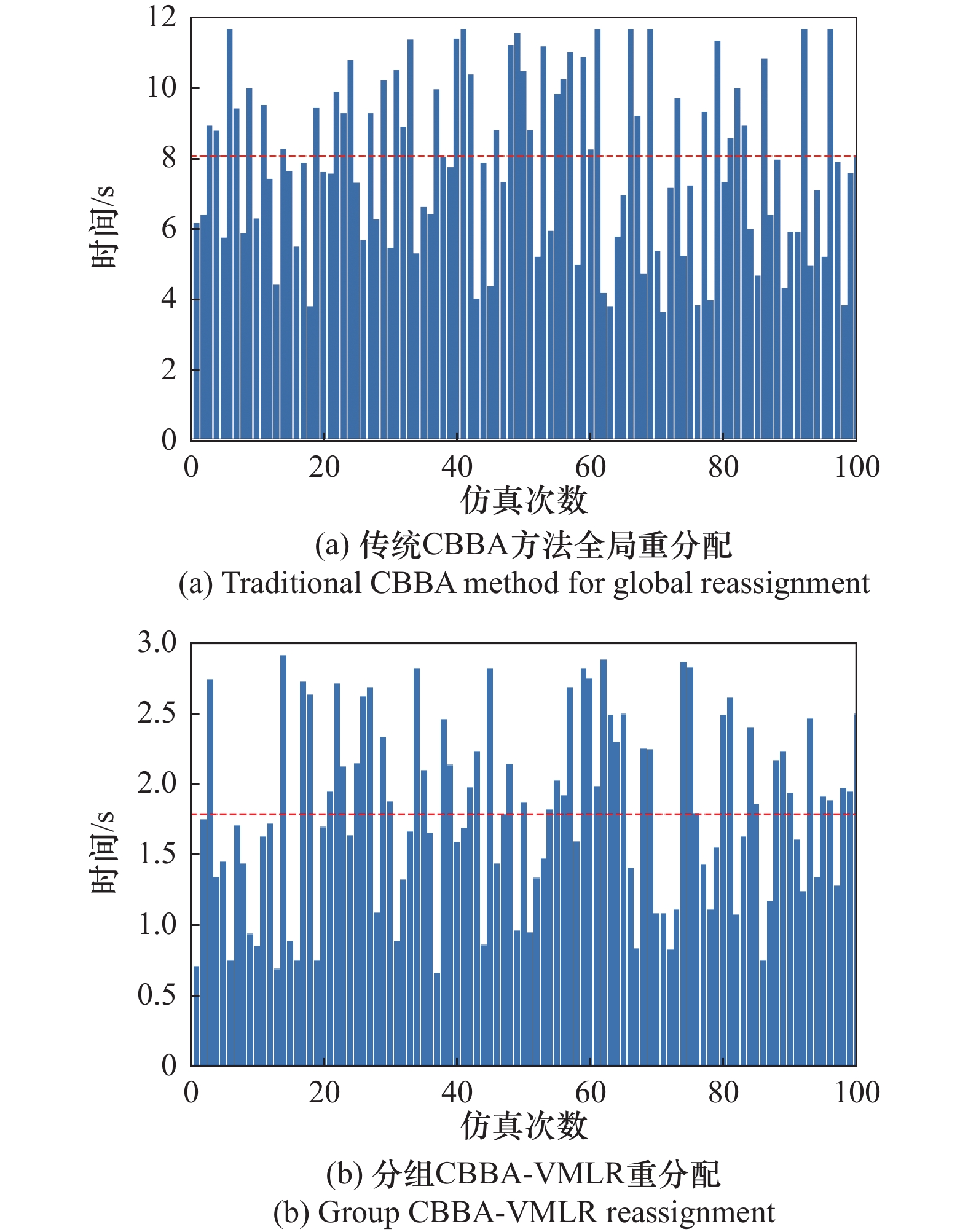
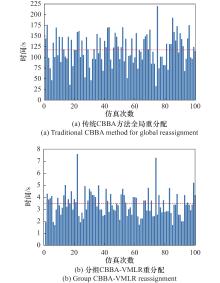
图13
任务规模3下两种算法的时间表现"
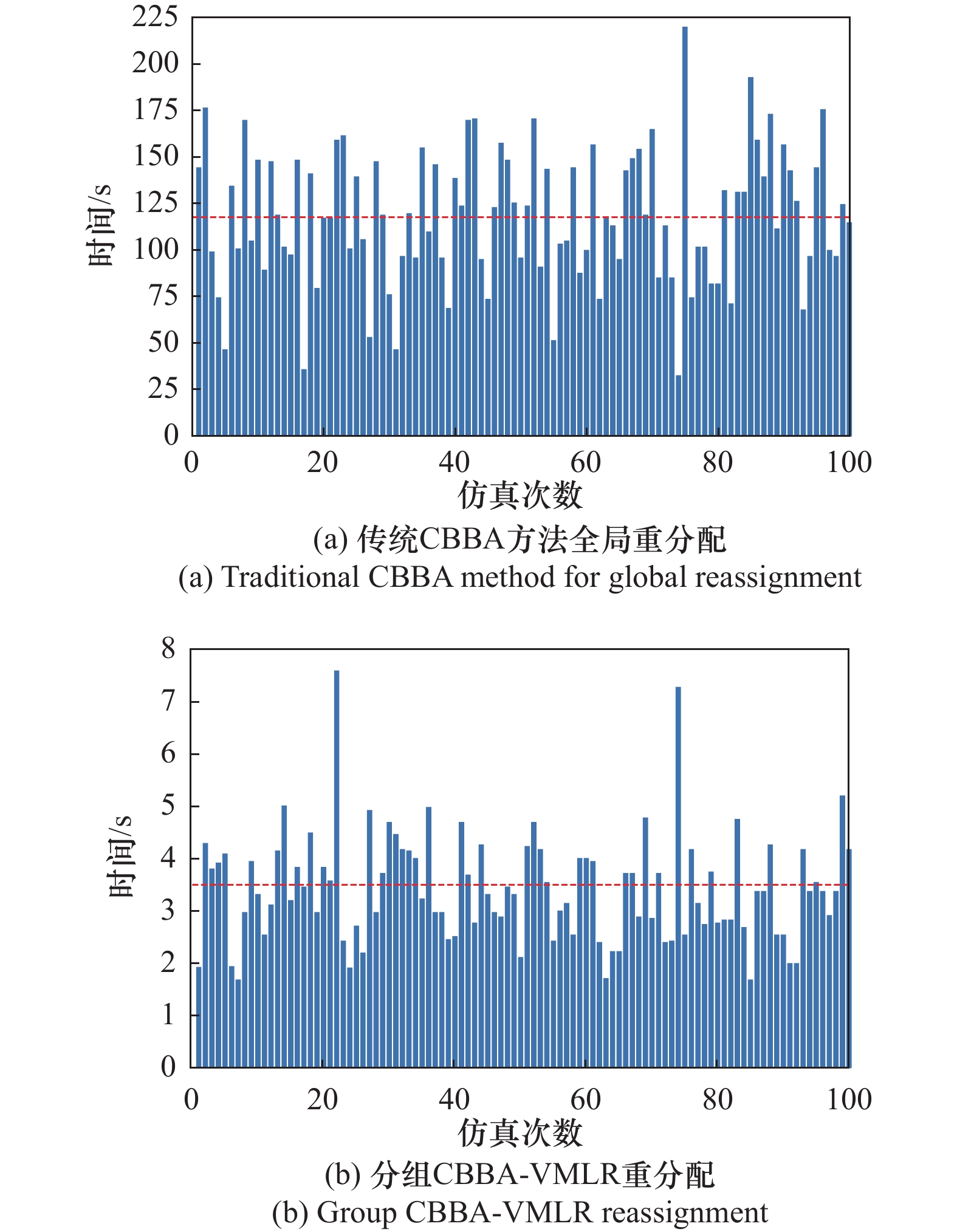
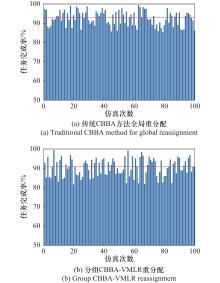
图14
任务规模3下两种算法的任务完成率表现"

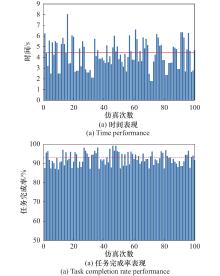
图15
任务规模4下分组CBBA-VMLR算法的性能表现"
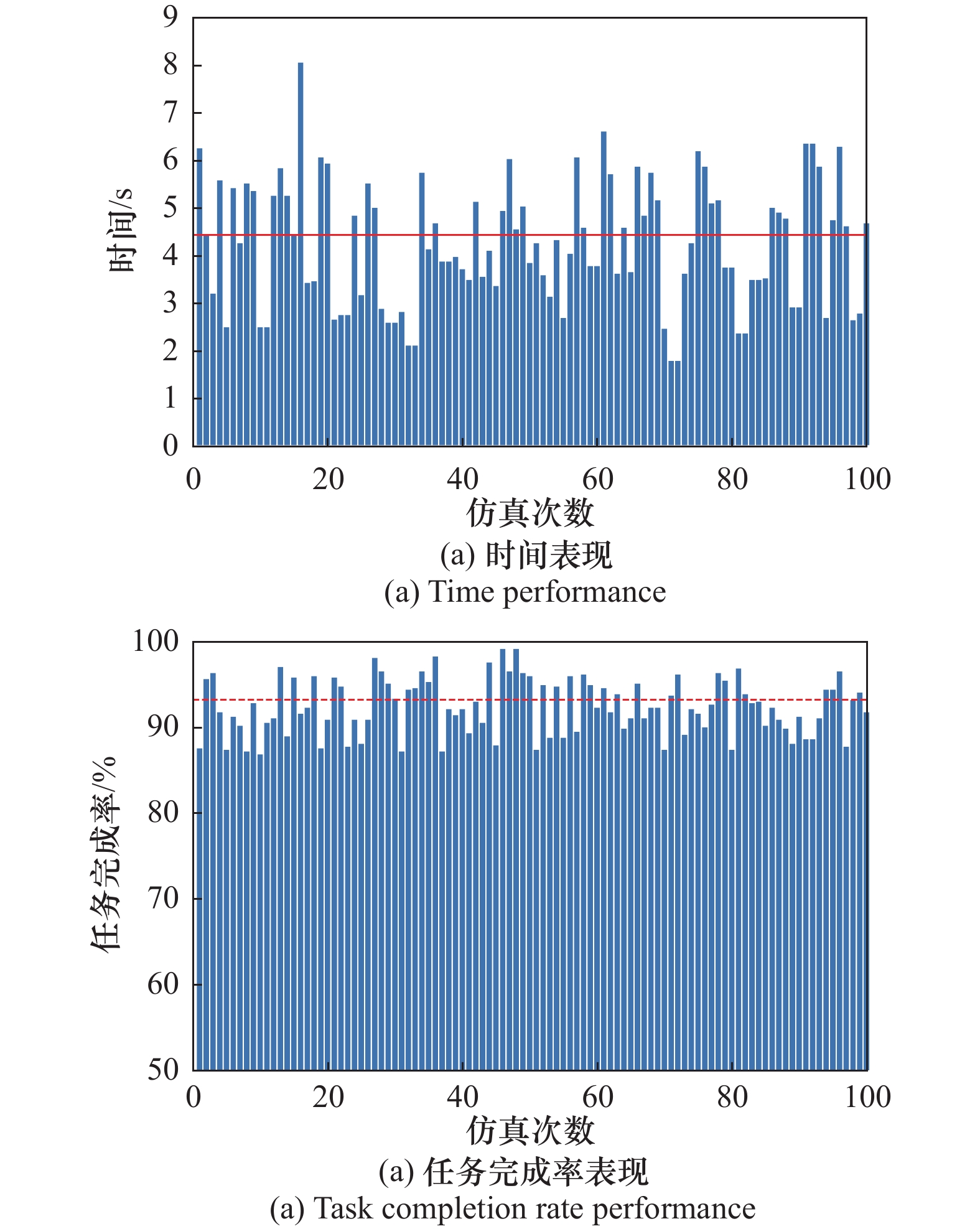
表3
不同任务规模下两种方法的时间均值表现"
| 任务规模 | 传统CBBA全局 重分配方法/s | 分组CBBA-VMLR 重分配方法/s |
| 任务规模1 | ||
| 任务规模2 | ||
| 任务规模3 | 117.75 | |
| 任务规模4 | — |
表4
不同任务规模下两种方法的任务完成率均值表现"
| 任务规模 | 传统CBBA全局 重分配方法/% | 分组CBBA-VMLR 重分配方法/% |
| 任务规模1 | 89.990 1 | 82.777 6 |
| 任务规模2 | 91.617 5 | 87.838 5 |
| 任务规模3 | 92.945 4 | 90.783 4 |
| 任务规模4 | — | 93.231 0 |
表5
目标任务信息表"
| 任务规模/个 | 智能体规模/个 | 平均任务完成率/% |
| 10 | 50 | |
| 15 | 75 | |
| 20 | 100 | |
| 25 | 125 | |
| 30 | 150 | |
| 35 | 175 | |
| 40 | 200 | |
| 45 | 225 | |
| 50 | 250 | |
| 55 | 220 | |
| 60 | 240 | |
| 65 | 260 | |
| 70 | 280 | |
| 75 | 300 |
图16
任务完成率随任务规模变化的表现"
| 1 | 李敏灿. 基于协作的多智能体系统设计与优化技术研究[D]. 长沙: 湖南大学, 2021. |
| LI M C. Research on design and optimization technology of multi-agent system based on cooperation[D]. Changsha: Hunan University, 2021. | |
| 2 |
ZENGIN U, DOGAN A. Real-time target tracking for autonomous UAVs in adversarial environments: a gradient search algorithm[J]. IEEE Trans. on Robotics, 2007, 23 (2): 294- 307.
doi: 10.1109/TRO.2006.889490 |
| 3 | ZHU S Q, WANG D W. Adversarial ground target tracking using UAVs with input constraints[J]. Journal of Intelligent & Robotic Systems, 2012, 65 (1): 521- 532. |
| 4 |
KIM H G, PARK J S, LEE D H. Potential of unmanned aerial sampling for monitoring insect populations in rice fields[J]. Florida Entomologist, 2018, 101 (2): 330- 334.
doi: 10.1653/024.101.0229 |
| 5 | LI M L, YANG W J, YI X D, et al. Swarm robot task planning based on air and ground coordination for disaster search and rescue[J]. IEEE Trans. on Electron Devices, 2019, 55 (11): 1- 9. |
| 6 |
SUDHAKAR S, VIJAYAKUMAR V, SATHIYA KUMAR C, et al. Unmanned aerial vehicle (UAV) based forest fire detection and monitoring for reducing false alarms in forest-fires[J]. Computer Communications, 2020, 149, 1- 16.
doi: 10.1016/j.comcom.2019.10.007 |
| 7 |
NUNES E, MANNER M, MITICHE H, et al. A taxonomy for task allocation problems with temporal and ordering constraints[J]. Robotics and Autonomous Systems, 2017, 90, 55- 70.
doi: 10.1016/j.robot.2016.10.008 |
| 8 | 陈侠, 乔艳芝. 无人机任务分配综述[J]. 沈阳航空航天大学学报, 2016, 33 (6): 1- 7. |
| CHEN X, QIAO Y Z. Summary of unmanned aerial vehicle task allocation[J]. Journal of Shenyang Aerospace University, 2016, 33 (6): 1- 7. | |
| 9 | 贾高伟, 王建峰. 无人机集群任务规划方法研究综述[J]. 系统工程与电子技术, 2021, 43 (1): 99- 111. |
| JIA G W, WANG J F. Summary of research on task planning methods for drone cluster[J]. Systems Engineering and Electronic, 2021, 43 (1): 99- 111. | |
| 10 | 齐小刚, 李博, 范英盛, 等. 多约束下多无人机的任务规划研究综述[J]. 智能系统学报, 2020, 15 (2): 204- 217. |
| QI X G, LI B, FANG Y S, et al. A survey of mission planning on UAVs systems based on multiple constraints[J]. CAAI Transactions on Intelligent Systems, 2020, 15 (2): 204- 217. | |
| 11 |
JIA Z Y, YU J Q, AI X, et al. Cooperative multiple task assignment problem with stochastic velocities and time windows for heterogeneous unmanned aerial vehicles using a genetic algorithm[J]. Aerospace Science and Technology, 2018, 76, 112- 125.
doi: 10.1016/j.ast.2018.01.025 |
| 12 |
BAI X S, YAN W S, SAMGE S, et al. An integrated multi-population genetic algorithm for multi-vehicle task assignment in a drift field[J]. Information Sciences, 2018, 453, 227- 238.
doi: 10.1016/j.ins.2018.04.044 |
| 13 |
WANG Z, LIU L, LONG T, et al. Multi-UAV reconnaissance task allocation for heterogeneous targets using an opposition-based genetic algorithm with double-chromosome encoding[J]. Chinese Journal of Aeronautics, 2018, 31 (2): 339- 350.
doi: 10.1016/j.cja.2017.09.005 |
| 14 | 马华伟, 朱益民, 胡笑旋. 基于粒子群算法的无人机舰机协同任务规划[J]. 系统工程与电子技术, 2016, 38 (7): 1583- 1588. |
| MA H W, ZHU Y M, HU X X. Unmanned aerial vehicle ship aircraft collaborative task planning based on particle swarm optimization algorithm[J]. Systems Engineering and Electronic, 2016, 38 (7): 1583- 1588. | |
| 15 | 杜晓凯. 无人机集群混合式任务实时分配算法研究[D]. 西安: 西安电子科技大学, 2020. |
| DU X K. Research on real time task allocation algorithm for hybrid UAV cluster[D]. Xi’an: Xidian University, 2020. | |
| 16 |
LEE D H. Resource-based task allocation for multi-robot systems[J]. Robotics and Autonomous Systems, 2018, 103, 151- 161.
doi: 10.1016/j.robot.2018.02.016 |
| 17 |
LIANG H T, KANG F J. A novel task optimal allocation approach based on contract net protocol for agent-oriented UUV swarm system modeling[J]. Optik, 2016, 127 (8): 3928- 3933.
doi: 10.1016/j.ijleo.2016.01.071 |
| 18 |
ZHAO M, LI D C.. Collaborative task allocation of heterogeneous multi-unmanned platform based on a hybrid improved contract net algorithm[J]. IEEE Access, 2021, 9, 78936- 78946.
doi: 10.1109/ACCESS.2021.3084238 |
| 19 |
SUN C H, WANG X C, QIU H X, et al. Game theoretic self-organization in multi-satellite distributed task allocation[J]. Aerospace Science and Technology, 2021, 112, 106650.
doi: 10.1016/j.ast.2021.106650 |
| 20 | PONDA S, REDDING J, CHOI H L, et al. Decentralized planning for complex missions with dynamic communication constraints[C]// Proc. of the American Control Conference, 2010. |
| 21 |
ALITAPPEH R J, JEDDISARAVI K. Multi-robot exploration in task allocation problem[J]. Applied Intelligence, 2022, 52 (2): 2189- 2211.
doi: 10.1007/s10489-021-02483-3 |
| 22 |
QIE H, SHI D X, SHEN T L, et al. Joint optimization of multi-UAV target assignment and path planning based on multi-agent reinforcement learning[J]. IEEE Access, 2019, 7, 146264- 146272.
doi: 10.1109/ACCESS.2019.2943253 |
| 23 | FARUQ F, PARKER D, LACCRDA B, et al. Simultaneous task allocation and planning under uncertainty[C]// Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018. |
| 24 |
CAO R Y, LI S C, JI Y H, et al. Task assignment of multiple agricultural machinery cooperation based on improved ant colony algorithm[J]. Computers and Electronics in Agriculture, 2021, 182, 105993.
doi: 10.1016/j.compag.2021.105993 |
| 25 | 谷旭平, 唐大全. 基于细菌觅食算法的多异构无人机任务规划[J]. 系统工程与电子技术, 2021, 43 (11): 3312- 3320. |
| GU X P, TANG D Q. Multi heterogeneous unmanned aerial vehicle mission planning based on bacterial foraging algorithm[J]. Systems Engineering and Electronics, 2021, 43 (11): 3312- 3320. | |
| 26 |
ZHOU J, ZHAO X Z, ZHANG X P, et al. Task allocation for multi-agent systems based on distributed many-objective evolutionary algorithm and greedy algorithm[J]. IEEE Access, 2020, 8, 19306- 19318.
doi: 10.1109/ACCESS.2020.2967061 |
| 27 | TANG J, CHEN X, ZHU X M, et al. Dynamic reallocation model of multiple unmanned aerial vehicle tasks in emergent adjustment scenarios[J]. IEEE Trans. on Aerospace and Electronic Systems, 2022, 59(2): 1139−1155. |
| 28 | 鞠锴, 冒泽慧, 姜斌, 等. 基于势博弈的异构多智能体系统任务分配和重分配[J]. 自动化学报, 2022, 48 (10): 2416- 2428. |
| JU K, MAO Z H, JIANG B, et al. Task allocation and reassignment of heterogeneous multi-agent system based on potential game[J]. Journal of Automation, 2022, 48 (10): 2416- 2428. | |
| 29 |
张安, 毕文豪, 邱鹏, 等. 基于改进合同网的多UAV打击地面TST任务重分配[J]. 战术导弹技术, 2019, (2): 39- 46.
doi: 10.16358/j.issn.1009-1300.2019.7.213 |
|
ZHANG A, BI W H, QIU P, et al. Multi UAV strike ground TST task reassignment based on improved contract network[J]. Tactical Missile Technology, 2019, (2): 39- 46.
doi: 10.16358/j.issn.1009-1300.2019.7.213 |
|
| 30 | JAIN A K, DUBES R C. Algorithms for clustering data[M]. Upper Saddle River: Prentice-Hall, 1988. |
| 31 |
CHOI H L, BRUNET L, HOW J P. Consensus-based decentralized auctions for robust task allocation[J]. IEEE Trans. on Robotics, 2009, 25 (4): 912- 926.
doi: 10.1109/TRO.2009.2022423 |
| [1] | 李宗刚, 邱进涛, 宁小刚, 陈引娟. 多智能体系统周期动态事件触发二分一致性[J]. 系统工程与电子技术, 2026, 48(1): 278-289. |
| [2] | 郭方杰, 李靖, 张朝辉. 具有输入时滞的MAS预设时间滞后一致性[J]. 系统工程与电子技术, 2025, 47(9): 3041-3046. |
| [3] | 杨大鹏, 龚资浩, 王小也, 郭正玉, 罗德林. 基于多智能体强化学习的无人机协同截击机动决策研究[J]. 系统工程与电子技术, 2025, 47(9): 3076-3085. |
| [4] | 王子怡, 傅雄军, 董健, 冯程. 基于分层多智能体强化学习的雷达协同抗干扰策略优化[J]. 系统工程与电子技术, 2025, 47(4): 1108-1114. |
| [5] | 付可, 陈浩, 王宇, 刘权, 黄健. 基于不确定性的贝叶斯策略重用方法[J]. 系统工程与电子技术, 2025, 47(2): 535-543. |
| [6] | 李嘉乐, 钟绮霖, 肖杰, 李国飞. 多智能体系统自适应固定时间编队控制[J]. 系统工程与电子技术, 2025, 47(2): 600-607. |
| [7] | 王琛, 朱承, 王祥科, 丁兆云, 张千桢, 张胜, 朱先强. 无人机分布式集群反制动态多目标运动控制技术[J]. 系统工程与电子技术, 2025, 47(11): 3765-3778. |
| [8] | 张耀中, 吴卓然, 张建东, 杨啟明, 史国庆, 徐自祥. 基于ME-DDPG算法的无人机多对一追逃博弈[J]. 系统工程与电子技术, 2025, 47(10): 3288-3299. |
| [9] | 刘伟民, 王永越, 马欣阳, 刘金琨. 输入时滞多智能体系统的输入受限一致性控制[J]. 系统工程与电子技术, 2024, 46(9): 3176-3184. |
| [10] | 张杰, 刘开蓉, 陈金宝, 张迎雪, 陈传志, 余虹志, 张云啸. 基于空间对抗的多智能体编队控制方法[J]. 系统工程与电子技术, 2024, 46(6): 2082-2091. |
| [11] | 罗俊仁, 张万鹏, 苏炯铭, 袁唯淋, 陈璟. 多智能体博弈学习研究进展[J]. 系统工程与电子技术, 2024, 46(5): 1628-1655. |
| [12] | 毕文豪, 张梦琦, 高飞, 杨咪, 张安. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3): 922-934. |
| [13] | 孙谷昊, 蔡中泽, 曾庆双. 多智能体编队加权中心点固定时间分布式跟踪控制[J]. 系统工程与电子技术, 2024, 46(12): 4165-4172. |
| [14] | 左仁伟, 李颖晖, 吕茂隆, 聂鸿雁. 动态自触发通信下多智能体输出反馈包容控制[J]. 系统工程与电子技术, 2024, 46(1): 345-356. |
| [15] | 马悦, 吴琳, 许霄. 基于多智能体强化学习的协同目标分配[J]. 系统工程与电子技术, 2023, 45(9): 2793-2801. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||