
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (7): 2256-2266.doi: 10.12305/j.issn.1001-506X.2025.07.19
郑凯文1,2, 杜承泽1,2,*, 赵兴芳1, 逄晓凡1
收稿日期:2024-06-04
出版日期:2025-07-16
发布日期:2025-07-22
通讯作者:
杜承泽
作者简介:郑凯文 (2000—), 男, 硕士研究生, 主要研究方向为智能信息处理与数据工程、无人机路径规划基金资助:Kaiwen ZHENG1,2, Chengze DU1,2,*, Xingfang ZHAO1, Xiaofan PANG1
Received:2024-06-04
Online:2025-07-16
Published:2025-07-22
Contact:
Chengze DU
摘要:
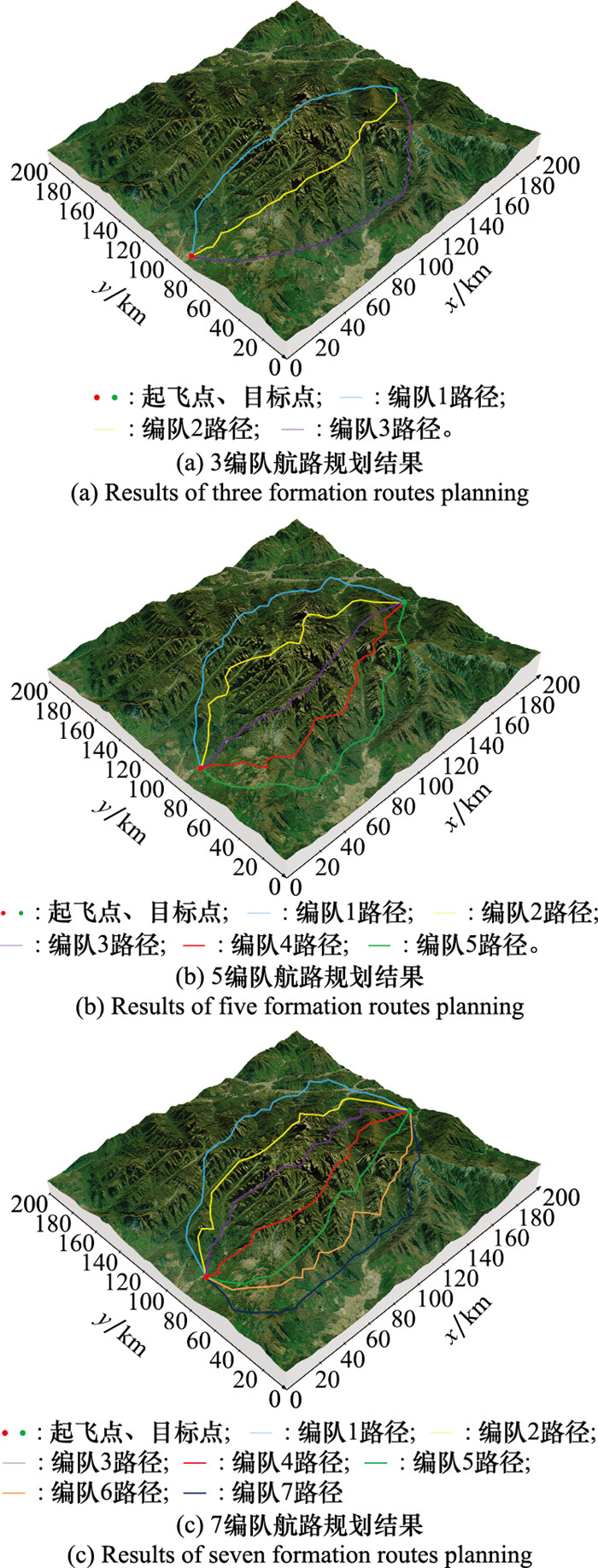
针对多编队时空路径生成研究的空白, 提出一种融合时空散列思想的无人机多编队航路规划方法。引入第3代安全散列算法对航路点时空信息进行散列计算和线性映射, 得到时空航路点和编队飞行区域。使用时空点面信息优化有偏采样, 解决多编队采样集中和无效路径过深问题。设计基于航路点偏置和时空平滑优化的三维增强型快速扩展随机树多编队航路规划算法, 以时空差异航路点为偏置目标, 结合人工势场法与时空约束条件优化节点搜索成本函数, 得到时空最佳差异路径。结果表明, 所提方法在规划用时和节点数上分别减少了53.33%和17.53%, 多编队路径数据验证了该方法具备时空差异生成能力。
中图分类号:
郑凯文, 杜承泽, 赵兴芳, 逄晓凡. 融合时空散列的三维RRT*多编队航路规划[J]. 系统工程与电子技术, 2025, 47(7): 2256-2266.
Kaiwen ZHENG, Chengze DU, Xingfang ZHAO, Xiaofan PANG. Integrating spatio-temporal hash in three-dimensional RRT* multi-formation route planning[J]. Systems Engineering and Electronics, 2025, 47(7): 2256-2266.
图1
无人机多编队协同时间三维航路规划流程"
图2
Hash-RRT*寻路流程图"
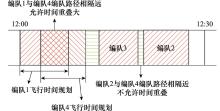
图3
时间散列映射结果示意图"
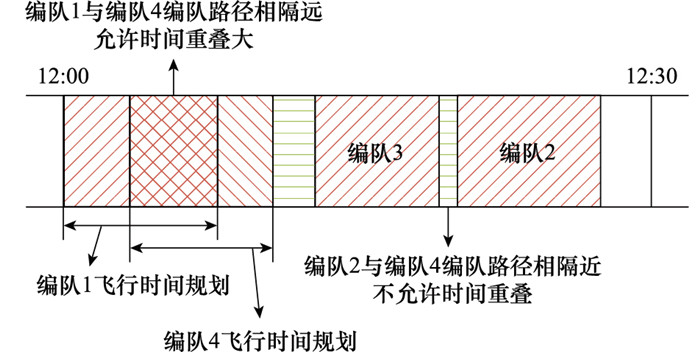
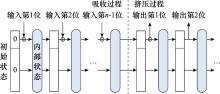
图4
SHA-3海绵结构处理过程"
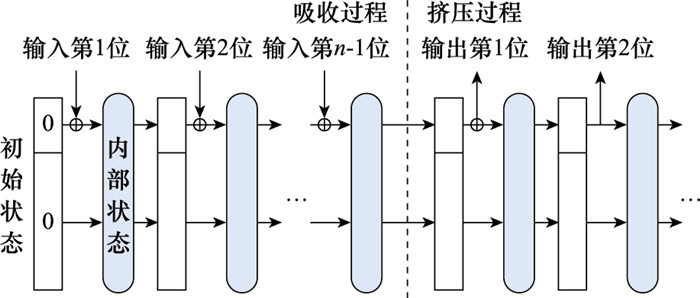

图5
航路点空间映射流程"
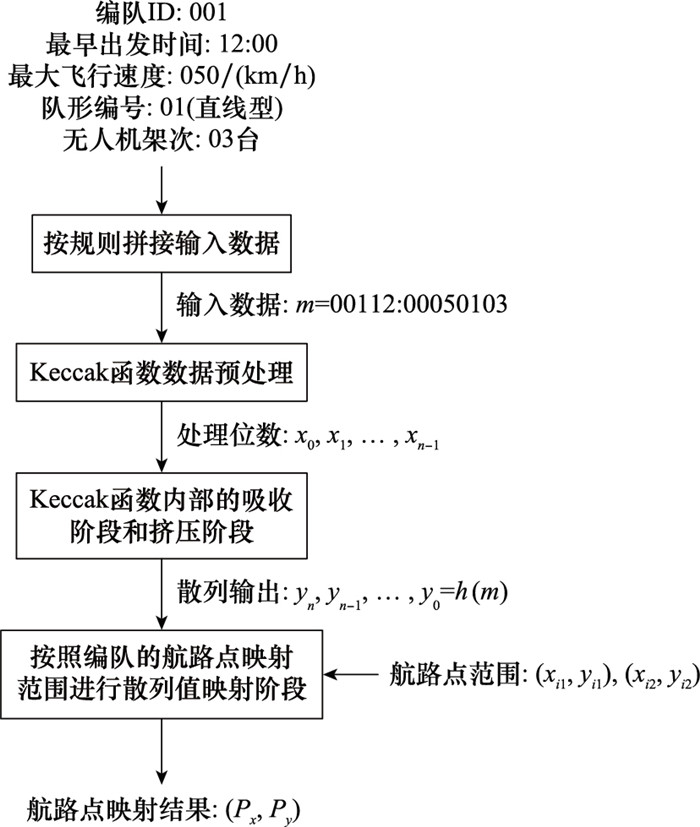
图6
有偏采样的方向性采样区域"
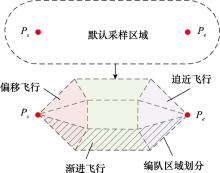
图7
复合函数区域划分结果示意图"
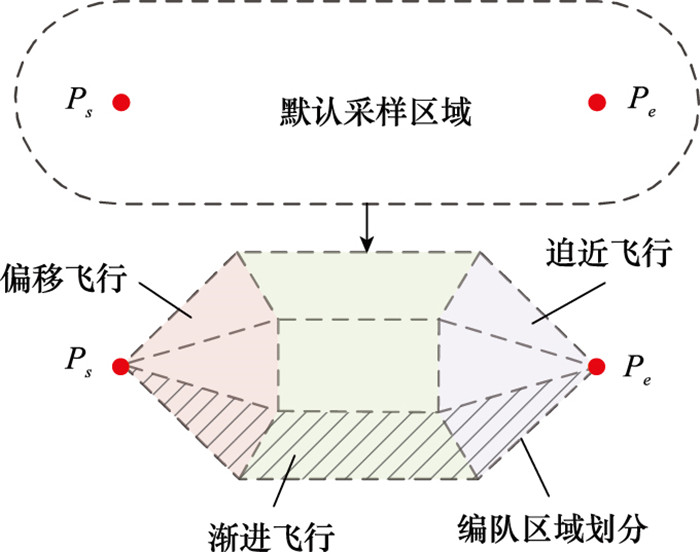

图8
航路点偏置示意图"
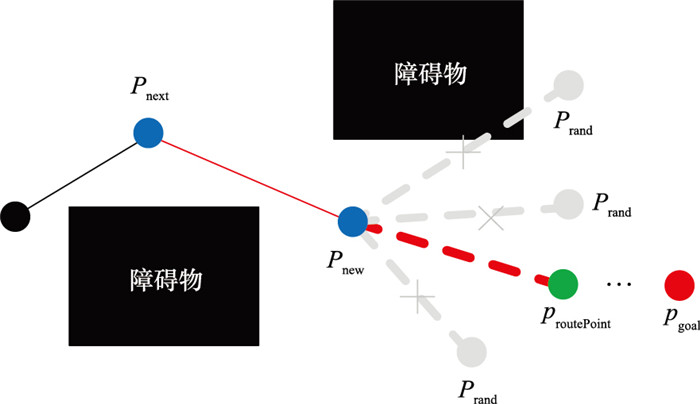
图9
航路点偏置效果对比图"
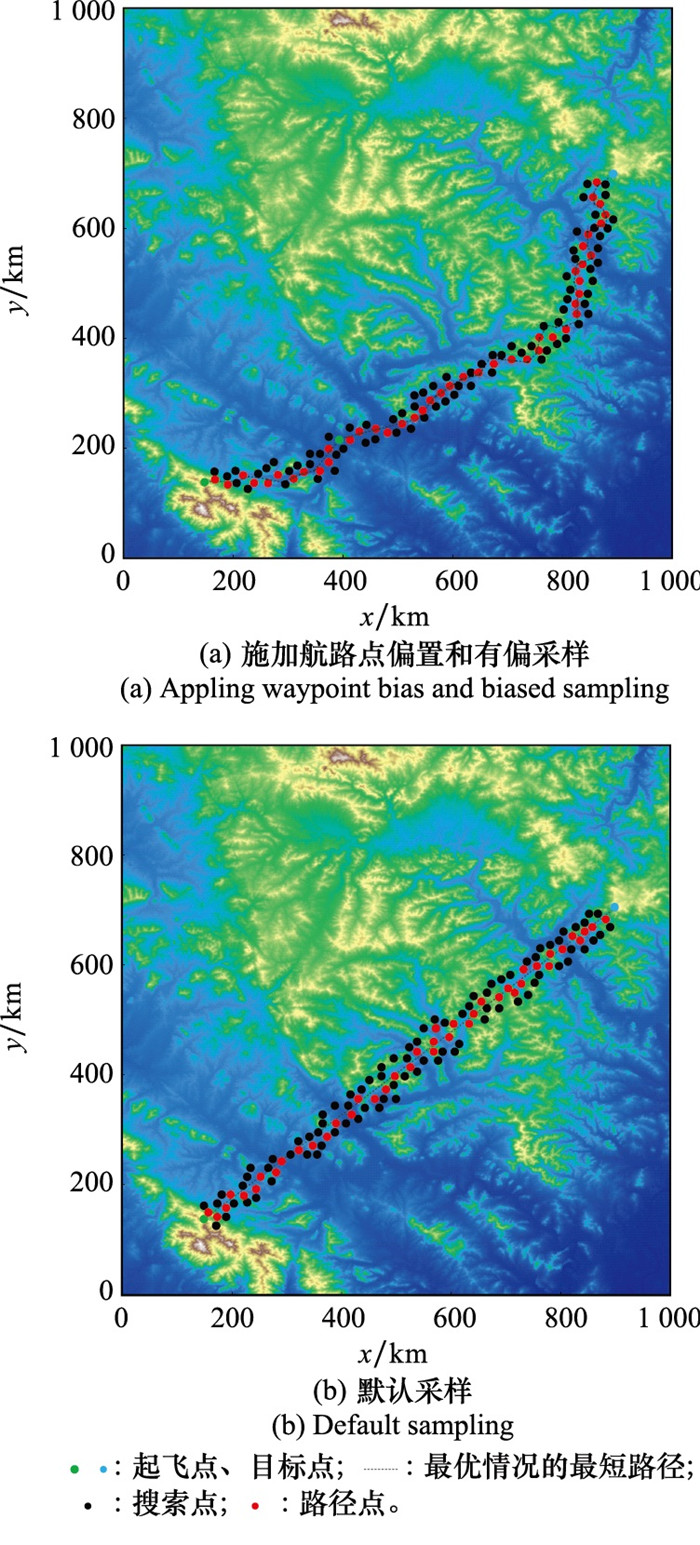
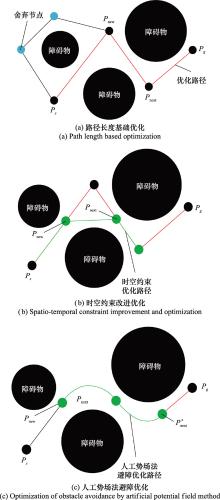
图10
时空平滑优化效果"
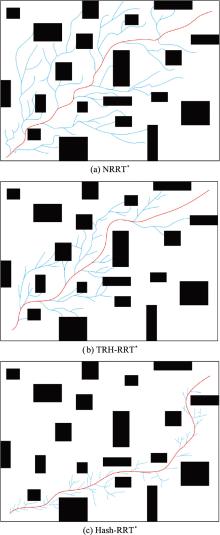
图11
3种RRT*算法仿真二维对比图"
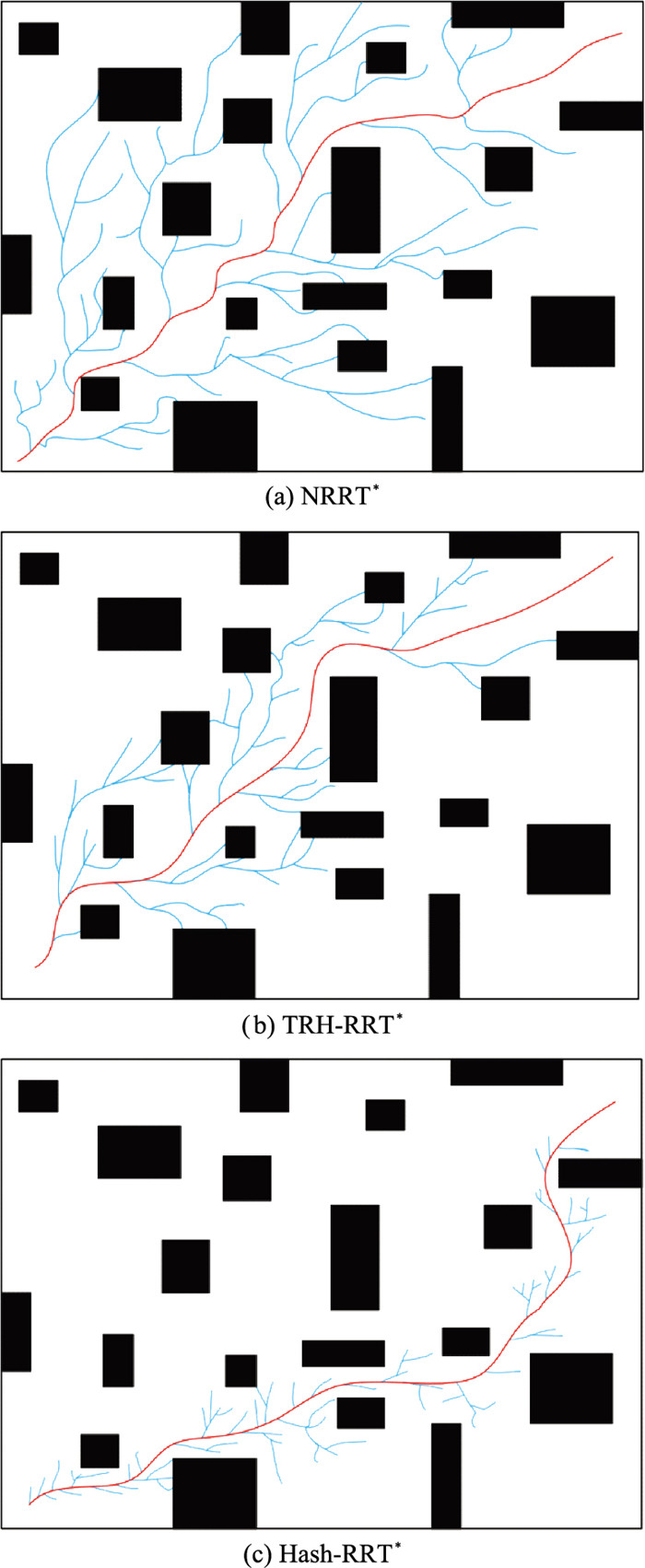
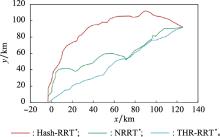
图12
航路地面投影图"
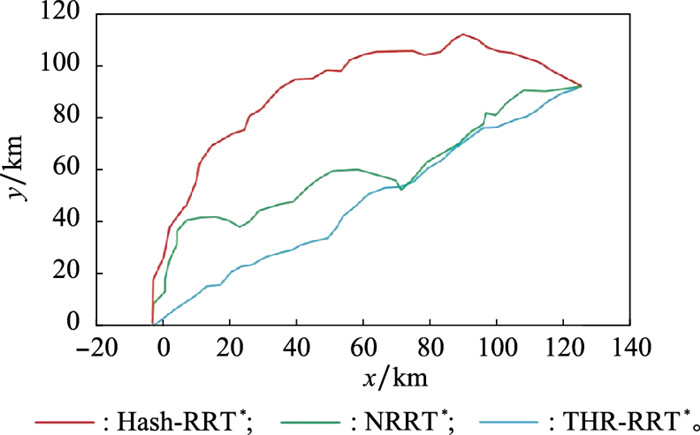
表1
3种方法的仿真数据对比"
| 算法 | 规划时间/s | 节点数 | |||||
| max | avg | sd | opt | avg | sd | ||
| NRRT* | 75.4 | 69.2 | 15.3 | 40.3 | 45.7 | 5.8 | |
| TRH-RRT* | 3.1 | 1.5 | 1.3 | 25.5 | 30.8 | 6.7 | |
| Hash-RRT* | 1.4 | 0.7 | 0.6 | 20.4 | 25.4 | 4.5 | |
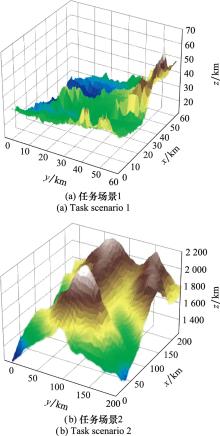
图13
不同任务场景实例"
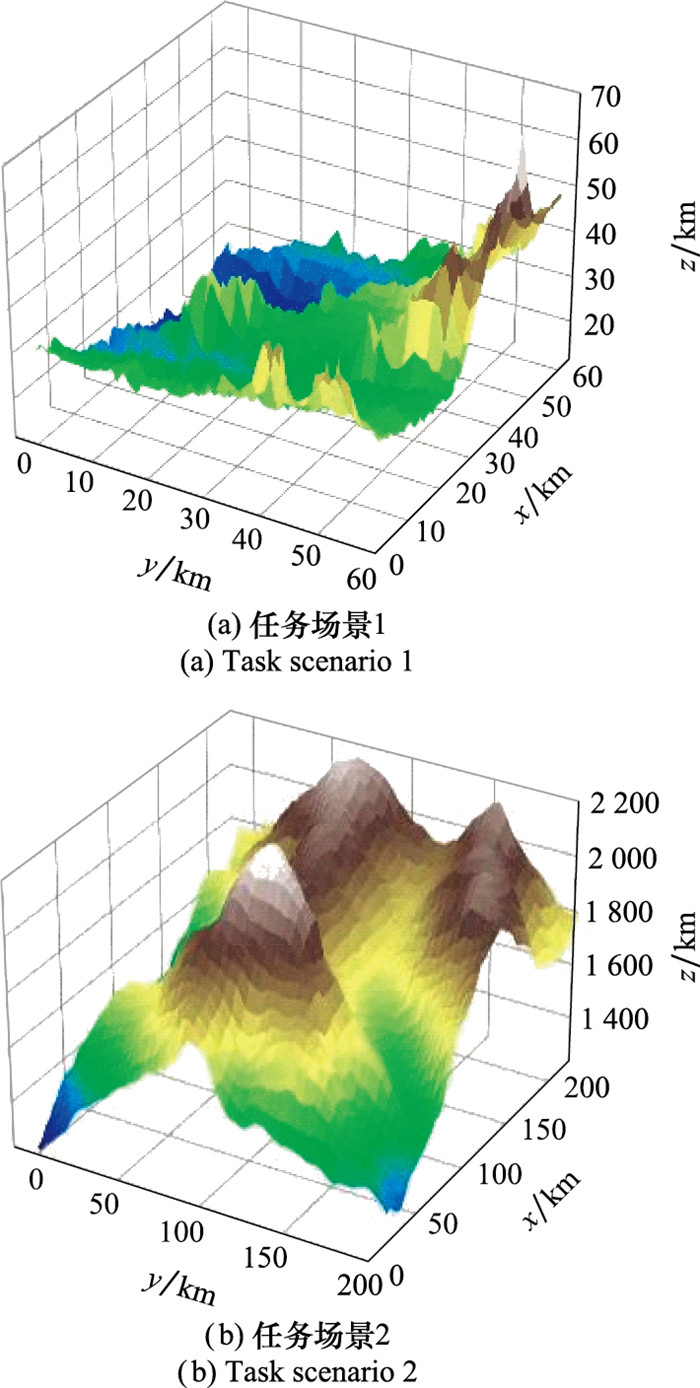
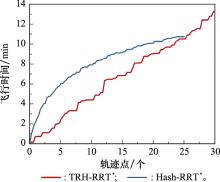
图14
飞行时间对比图"
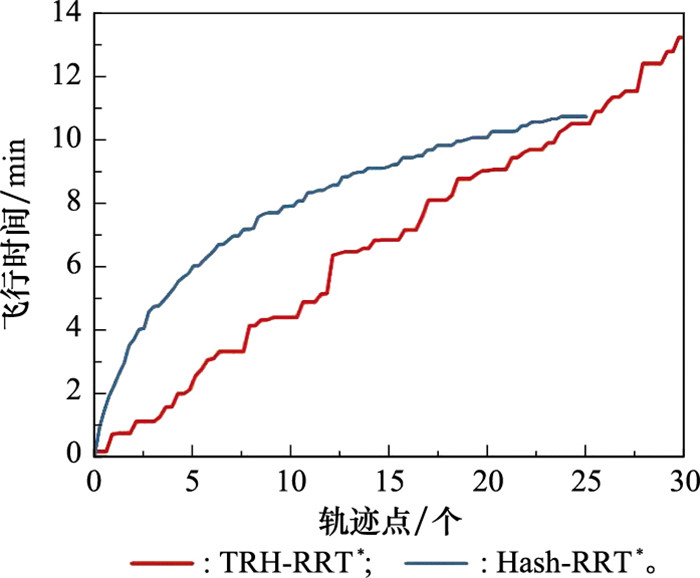
表2
3种方法可靠性对比"
| 算法 | 转弯角/(°) | 飞行时间/min | |||||
| max | Avg | sd | opt | avg | sd | ||
| NRRT* | 44.8 | 15.9 | 3.7 | 11.9 | 13.8 | 1.5 | |
| TRH-RRT* | 43.0 | 14.3 | 3.5 | 11.4 | 13.3 | 1.4 | |
| Hash-RRT* | 37.2 | 15.1 | 1.5 | 9.3 | 10.8 | 0.9 | |
表3
仿真对比实验差异化处理"
| 算法 | 差异化处理 |
| RRT*[ | 目标偏差、随机探索 |
| NRRT*[ | 目标偏差、引入编队身份特征 |
| 改进NSGA-Ⅱ[ | 初始化随机种群随机变异操作 |
| 2DQN[ | 动态调整贪心策略和环境难度 |
| DCPSO[ | 随机初始设置、动态粒子群 |
| SA-PSO[ | 随机初始解和邻域搜索 |
表4
仿真对比实验结果"
| 量化方法 | 指标 | RRT* | NRRT* | 改进的NSGA-Ⅱ | 2DQN | DCPSO | SA-PSO | Hash-RRT* |
| Frechet | opt | 3.63 | 2.7 | 7.46 | 3.86 | 6.2 | 2.03 | 13.43 |
| avg | 1.53 | 1.49 | 6.33 | 2.46 | 4.46 | 1.18 | 10.75 | |
| sd | 1.24 | 0.32 | 0.47 | 0.47 | 0.98 | 0.11 | 3.41 | |
| DTW | opt | 134.1 | 25.72 | 77.85 | 221.06 | 64.87 | 12.26 | 482.67 |
| avg | 47.4 | 10.69 | 60.32 | 137.93 | 43.48 | 6.94 | 292.54 | |
| sd | 1814.04 | 39.56 | 102.9 | 1889.4 | 155.72 | 4.22 | 10 477 | |
| 算法耗时/s | opt | 77.92 | 424.6 | 40.08 | 149.18 | 115.39 | 8010.6 | 19 |
| avg | 30.3 | 346.04 | 19.63 | 100.56 | 35.37 | 5177.6 | 3.55 | |
| sd | 185.22 | 62.33 | 14.38 | 800.61 | 397.8 | 196603 | 4.93 |
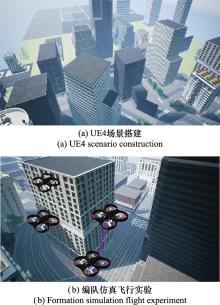
图15
使用UE4的仿真实验过程"
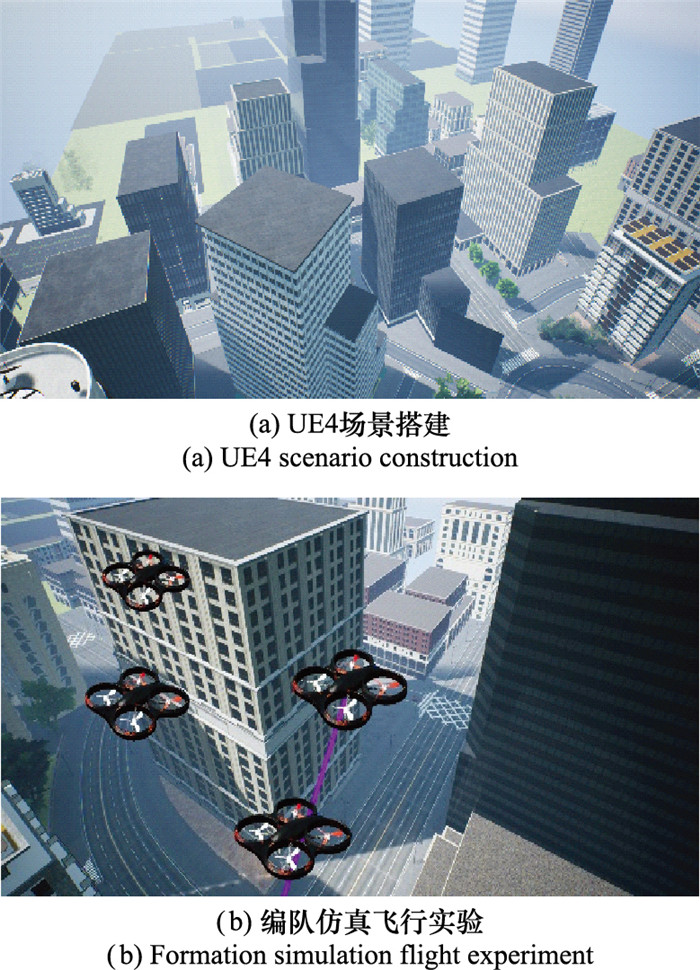
表5
仿真飞行实验数据"
| 算法 | 编队路径长度/km | 耗时/s | ||||
| 1 | 2 | 3 | 4 | 5 | ||
| NRRT* | 1.16 | 1.08 | 1.06 | 1.13 | 1.15 | 315.79 |
| Hash-RRT* | 1.39 | 1.18 | 1.05 | 1.19 | 1.26 | 5.49 |
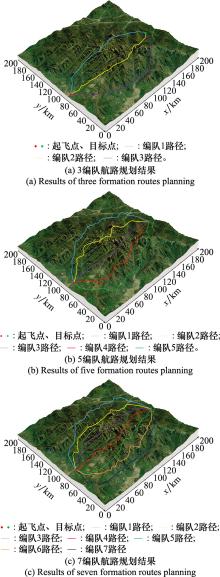
图16
误差分析"
| 1 | MOHSAN S A H , OTHMAN N Q H , LI Y , et al. Unmanned aerial vehicles (UAVs): practical aspects, applications, open challenges, security issues, and future trends[J]. Intelligent Service Robotics, 2023, 16 (1): 109- 137. |
| 2 | JAVED S , HASSAN A , AHMAD R , et al. State-of-the-art and future research challenges in UAV swarms[J]. IEEE Internet of Things Journal, 2024, 11 (11): 19023- 19045. |
| 3 | 董国强. 无人机——现代战争中的新锐力量[J]. 农村青少年科学探究, 2024 (1): 4- 6. |
| DONG G Q . Unmanned aerial vehicles—a cutting-edge force in modern warfare[J]. Scientific Inquiry for Rural Youth, 2024 (1): 4- 6. | |
| 4 | PUENTE-CASTRO A , RIVERO D , PAZOS A , et al. A review of artificial intelligence applied to path planning in UAV swarms[J]. Neural Computing and Applications, 2022, 34 (1): 153- 170. |
| 5 | 杨思明, 单征, 曹江, 等. 基于模型的强化学习在无人机路径规划中的应用[J]. 计算机工程, 2022, 48 (12): 255-260, 269. |
| YANG S M , SHAN Z , CAO J , et al. Application of model-based reinforcement learning in path planning of unmanned aerial vehicle[J]. Computer Engineering, 2022, 48 (12): 255-260, 269. | |
| 6 |
杨清清, 高盈盈, 郭玙, 等. 基于深度强化学习的海战场目标搜寻路径规划[J]. 系统工程与电子技术, 2022, 44 (11): 3486- 3495.
doi: 10.12305/j.issn.1001-506X.2022.11.24 |
|
YANG Q Q , GAO Y Y , GUO Y , et al. Target search path planning for naval battle field based on deep reinforcement learning[J]. Systems Engineering and Electronics, 2022, 44 (11): 3486- 3495.
doi: 10.12305/j.issn.1001-506X.2022.11.24 |
|
| 7 | SHAKYA A K , PILLAI G , CHAKRABARTY S . Reinforcement learning algorithms: a brief survey[J]. Expert Systems with Applications, 2023, 231, 120495. |
| 8 | BAKIRCI M, OZER M M. Involvement of unmanned aerial vehicles and swarm intelligence in future modern warfare: an overview[C]//Proc. of the International Conference on Computing, Intelligence and Data Analytics, 2023: 58-67. |
| 9 | XU C , XU M , YIN C J . Optimized multi-UAV cooperative path planning under the complex confrontation environment[J]. Computer Communications, 2020, 162, 196- 203. |
| 10 | FUSIC S J , SITHARTHAN R . Improved RRT* algorithm-based path planning for unmanned aerial vehicle in a 3D metropolitan environment[J]. Unmanned Systems, 2024, 12 (5): 859- 875. |
| 11 |
高升, 艾剑良, 王之豪. 混合种群RRT无人机航迹规划方法[J]. 系统工程与电子技术, 2020, 42 (1): 101- 107.
doi: 10.3969/j.issn.1001-506X.2020.01.14 |
|
GAO S , AI J L , WANG Z H . Mixed population RRT algorithm for UAV path planning[J]. Systems Engineering and Electronics, 2020, 42 (1): 101- 107.
doi: 10.3969/j.issn.1001-506X.2020.01.14 |
|
| 12 | MCCOURT M, TON C T, MEHTA S S, et al. Adaptive step-length RRT algorithm for improved coverage[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2016. |
| 13 | LEE H , LEE D , SHIM D H . Receding horizon-based RRT* algorithm for a UAV real-time path planner[M]. Texas: Aircraft Industries Association of America, 2017. |
| 14 |
杨小草, 都延丽, 步雨浓, 等. 基于层次分解的在线三维RRT*协同航路规划[J]. 系统工程与电子技术, 2023, 45 (5): 1409- 1419.
doi: 10.12305/j.issn.1001-506X.2023.05.17 |
|
YANG X C , DU Y L , BU Y N , et al. Online three-dimensional RRT* cooperative route planning based on hierarchical decomposition[J]. Systems Engineering and Electronics, 2023, 45 (5): 1409- 1419.
doi: 10.12305/j.issn.1001-506X.2023.05.17 |
|
| 15 |
赵贵祥, 周健, 李云淼, 等. 改进双向快速搜索随机树的无人艇路径规划[J]. 系统工程与电子技术, 2024, 46 (4): 1364- 1371.
doi: 10.12305/j.issn.1001-506X.2024.04.25 |
|
ZHAO G X , ZHOU J , LI Y M , et al. Improved bi-directional rapidly-exploring random tree path planning for USV[J]. Systems Engineering and Electronics, 2024, 46 (4): 1364- 1371.
doi: 10.12305/j.issn.1001-506X.2024.04.25 |
|
| 16 |
李广强, 董文超, 朱大庆, 等. 基于改进鲸鱼优化算法的AUV三维路径规划[J]. 系统工程与电子技术, 2023, 45 (7): 2170- 2182.
doi: 10.12305/j.issn.1001-506X.2023.07.28 |
|
LI G Q , DONG W C , ZHU D Q , et al. 3D path planning for AUV based on improved whale optimization algorithm[J]. Systems Engineering and Electronics, 2023, 45 (7): 2170- 2182.
doi: 10.12305/j.issn.1001-506X.2023.07.28 |
|
| 17 | WANG J K , CHI W Z , LI C M , et al. Neural RRT*: learning-based optimal path planning[J]. IEEE Trans.on Automation Science and Engineering, 2020, 17 (4): 1748- 1758. |
| 18 | KIANI F , SEYYEDABBASI A , ALIYEV R , et al. Adapted-RRT: novel hybrid method to solve three-dimensional path planning problem using sampling and metaheuristic-based algorithms[J]. Neural Computing and Applications, 2021, 33 (22): 15569- 15599. |
| 19 | GANESAN S , RAMALINGAM B , MOHAN R E . A hybrid sampling-based RRT* path planning algorithm for autonomous mobile robot navigation[J]. Expert Systems with Applications, 2024, 258, 125206. |
| 20 | GU M Y, HUANG Y Z. Dynamic obstacle avoidance of mobile robot based on adaptive velocity obstacle[C]//Proc. of the 36th IEEE Youth Academic Annual Conference of Chinese Association of Automation, 2021: 776-781. |
| 21 | CHEN H Y , JI Y B , NIU L J . Reinforcement learning path planning algorithm based on obstacle area expansion strategy[J]. Intelligent Service Robotics, 2020, 13 (2): 289- 297. |
| 22 | WU Z Y , DONG S P , YUAN M , et al. Rotate artificial potential field algorithm toward 3D real-time path planning for unmanned aerial vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2023, 237 (4): 940- 955. |
| 23 | YANG X , WU F Y , LI R C , et al. Real-time path planning for obstacle avoidance in intelligent driving sightseeing cars using spatial perception[J]. Applied Sciences, 2023, 13 (20): 11183. |
| 24 | ALT H , GODAU M . Computing the Frechet distance between two polygonal curves[J]. International Journal of Computational Geometry & Applications, 1995, 5, 75- 91. |
| 25 | YADAV M , ALAM M A . Dynamic time warping (DTW) algorithm in speech: a review[J]. International Journal of Research in Electronics and Computer Engineering, 2018, 6 (1): 524- 528. |
| 26 | ALMEIDA J B, BARITEL-RUET C, BARBOSA M, et al. Machine-checked proofs for cryptographic standards: indiffe-rentiability of sponge and secure high-assurance implementations of SHA-3[C]//Proc. of the ACM SIGSAC Conference on Computer and Communications Security, 2019. |
| 27 | SANG H Q , YOU Y S , SUN X J , et al. The hybrid path planning algorithm based on improved A * and artificial potential field for unmanned surface vehicle formations[J]. Ocean Engineering, 2021, 223 (3): 108709. |
| 28 | SHIN J J , BANG H . UAV path planning under dynamic threats using an improved PSO algorithm[J]. International Journal of Aerospace Engineering, 2020, 2020 (1): 8820284. |
| 29 | MOKRANE A, BRAHAM A C, CHERLI B. UAV path planning based on dynamic programming algorithm on photogrammetric DEMs[C]//Proc. of the IEEE International Conference on Electrical Engineering, 2020. |
| 30 | SEIFU T K , WOLDESENBET T A , ALEMAYEHU T , et al. Spatio-temporal change of land use/land cover and vegetation using multi-MODIS satellite data, western ethiopia[J]. The Scientific World Journal, 2023, 2023 (1): 7454137. |
| 31 | MUSA A, ZANATTA L, BARCHI F, et al. A method for accelerated simulations of reinforcement learning tasks of UAVs in AirSim[C]//Proc. of the 14th International Conference on Advances in System Simulation, 2022: 46-53. |
| 32 | TAN W H, LAI W K, CHEN P H, et al. An improved NSGA-Ⅱ for UAV path planning[C]//Proc. of the International Conference on Neural Information Processing, 2023: 305-316. |
| 33 | PUENTE-CASTRO A , RIVERO D , PEDROSA E , et al. Q-learning based system for path planning with unmanned aerial vehicles swarms in obstacle environments[J]. Expert Systems with Applications, 2024, 235, 121240. |
| 34 | 王龙宝, 栾茵琪, 徐亮, 等. 基于动态簇粒子群优化的无人机集群路径规划方法[J]. 计算机应用, 2023, 43 (12): 3816- 3823. |
| WANG L B , LUAN Y Q , XU L , et al. Path planning method for UAV swarm based on dynamic cluster particle swarm optimization[J]. Journal of Computer Applications, 2023, 43 (12): 3816- 3823. | |
| 35 | HUANG Q, SHENG Z C, FANG Y, et al. A simulated annealing-particle swarm optimization algorithm for UAV multi-target path planning[C]//Proc. of the 2nd IEEE International Conference on Consumer Electronics and Computer Engineering, 2022: 906-910. |
| [1] | 冯泽彪, 杨旭, 汪建均. 基于主动学习的树状高斯过程建模与参数优化[J]. 系统工程与电子技术, 2025, 47(6): 1950-1963. |
| [2] | 李茹茹, 李靖, 张朝辉. 未知扰动下非严格反馈系统的自适应优化跟踪控制[J]. 系统工程与电子技术, 2025, 47(6): 1985-1993. |
| [3] | 殷泽阳, 梁浩, 廖宇新, 陈晓方, 谢永芳. 基于动态障碍物可达包络分析的无人机编队路径规划[J]. 系统工程与电子技术, 2025, 47(4): 1275-1284. |
| [4] | 邢胜杰, 赵冬, 任文静. 基于事件触发的柔性机械臂执行器故障补偿[J]. 系统工程与电子技术, 2025, 47(4): 1311-1318. |
| [5] | 邓柏海, 徐锦法. 复合式无人直升机姿态控制半物理仿真验证[J]. 系统工程与电子技术, 2025, 47(2): 608-620. |
| [6] | 李嘉乐, 钟绮霖, 肖杰, 李国飞. 多智能体系统自适应固定时间编队控制[J]. 系统工程与电子技术, 2025, 47(2): 600-607. |
| [7] | 秦湖程, 黄炎焱, 陈天德, 张寒. 基于PPO算法的集群多目标火力规划方法[J]. 系统工程与电子技术, 2024, 46(11): 3764-3773. |
| [8] | 宋睿涛, 高先明, 黄姣蕊, 杨春刚, 黄韬, 李芫芫. 基于行为树的组网服务管控架构及调度方法[J]. 系统工程与电子技术, 2024, 46(10): 3547-3556. |
| [9] | 刘伟民, 王永越, 马欣阳, 刘金琨. 输入时滞多智能体系统的输入受限一致性控制[J]. 系统工程与电子技术, 2024, 46(9): 3176-3184. |
| [10] | 张冬, 邢福逸, 徐允鹤, 钱鹏. 基于双模式切换的机载惯性/雷达组合导航方法[J]. 系统工程与电子技术, 2024, 46(8): 2770-2778. |
| [11] | 陆宁云, 李洋, 姜斌, 黄守金, 马坤. 复杂系统测试性设计与故障诊断策略研究进展[J]. 系统工程与电子技术, 2024, 46(7): 2359-2373. |
| [12] | 桂洋, 郑柏超, 高鹏. 基于NESO-LFDC的四旋翼无人机滑模姿态控制[J]. 系统工程与电子技术, 2024, 46(3): 1075-1083. |
| [13] | 赵昱宇, 索超, 王雨潇. 基于微分平坦的高超声速飞行器跟踪控制方法[J]. 系统工程与电子技术, 2024, 46(3): 1084-1092. |
| [14] | 胡树欣, 张安, 孙嫚憶, 李铭浩. 基于一致性理论和S-MPC的四旋翼编队协同避障[J]. 系统工程与电子技术, 2024, 46(2): 658-667. |
| [15] | 姬泽阳, 杨春刚, 李富强, 欧阳颖, 刘祥林. 基于自然语言处理的意图驱动网络表征[J]. 系统工程与电子技术, 2024, 46(1): 318-325. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||