
系统工程与电子技术 ›› 2024, Vol. 46 ›› Issue (2): 658-667.doi: 10.12305/j.issn.1001-506X.2024.02.29
• 制导、导航与控制 • 上一篇
胡树欣, 张安, 孙嫚憶, 李铭浩
收稿日期:2022-12-14
出版日期:2024-01-25
发布日期:2024-02-06
通讯作者:
胡树欣
作者简介:胡树欣(1996—), 男, 硕士研究生, 主要研究方向为多智能体协同控制基金资助:Shuxin HU, An ZHANG, Manyi SUN, Minghao LI
Received:2022-12-14
Online:2024-01-25
Published:2024-02-06
Contact:
Shuxin HU
摘要:
针对四旋翼无人机队形保持、编队避障问题, 在双向、时不变通信拓扑结构下, 基于领航跟随策略, 利用安全攸关模型预测控制(safety-critical model predictive control, S-MPC)和一致性理论, 设计编队控制器并实现了具有避障能力的队形保持。采用分散式S-MPC算法, 每架无人机在满足避碰条件无人机的可行区域内, 仅规划自身运动来跟踪编队控制算法指定的轨迹。研究了各解耦后的无人机如何与其他无人机并行求解带有耦合约束的优化问题, 从而保证了各无人机独立决策的一致性。同时, 所提算法将控制障碍函数(control barrier function, CBF)引入到MPC控制器的约束中, 从而保证无人机飞行在远离障碍物的安全集合内, 规划出的轨迹更为平滑, 减小了系统能耗。最后, 通过仿真实验验证了所提方法的有效性。
中图分类号:
胡树欣, 张安, 孙嫚憶, 李铭浩. 基于一致性理论和S-MPC的四旋翼编队协同避障[J]. 系统工程与电子技术, 2024, 46(2): 658-667.
Shuxin HU, An ZHANG, Manyi SUN, Minghao LI. Obstacles avoidance for quadrotor formation based on consensus theory and S-MPC[J]. Systems Engineering and Electronics, 2024, 46(2): 658-667.

图1
四旋翼无人机结构图"

表1
控制输入和状态符号定义"
| 符号 | 变量名称 | 符号 | 变量名称 | |
| x, y, z/m | 位置 | p, q/(rad/s) | 角速率 | |
| u, v, w/(m/s) | 速度 | m/kg | 质量 | |
| ϕ/rad | 滚转角 | g/(m/s2) | 重力加速度 | |
| θ/rad | 俯仰角 | τθ, τϕ/(N·m) | 力矩 | |
| Ixx, Iyy/(kg·m2) | 转动惯量 | ftotal/N | 推力 |

图2
编队控制问题描述"


图3
编队控制求解框架"


图4
MPC原理"


图5
编队通信网络结构"

表2
障碍物信息"
| xobs | yobs | robs |
| -1.5 | -2.0 | 1.0 |
| -4.0 | -3.0 | 1.5 |

图6
不同γ参数下的S-MPC规划轨迹"


图7
不同γ参数下的S-MPC每次迭代计算时间"


图8
不同γ参数下的S-MPC平均计算时间"

表3
参数γ影响分析"
| γ | 最小距离 | 控制输入代价 |
| 0.1 | 4.683 6 | 8.796 5 |
| 0.2 | 3.623 7 | 8.730 4 |
| 0.5 | 3.048 8 | 9.078 5 |
| 1.0 | 2.733 3 | 8.820 4 |

图9
不同Np参数下的S-MPC规划轨迹"


图10
不同Np参数下的S-MPC每次迭代计算时间"


图11
不同Np参数下的S-MPC平均计算时间"


图12
S-MPC轨迹规划"


图13
S-MPC和APF规划轨迹"
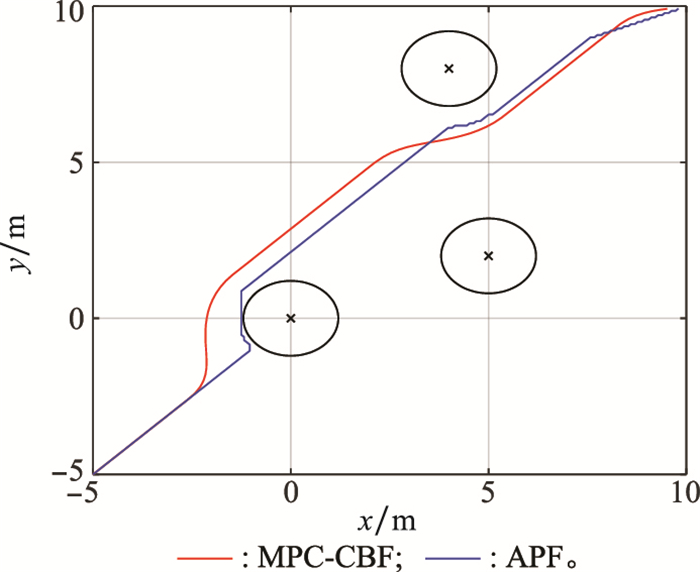

图14
编队通信拓扑结构"

表4
无人机初始状态"
| 无人机 | x | y |
| UAV1 | -4 | -1.5 |
| UAV2 | -7 | -2.0 |
| UAV3 | -3 | -6.0 |
| UAV4 | -6 | -5.5 |
| UAV5 | -5 | -5.0 |

图15
无人机编队飞行轨迹"


图16
无人机编队系统位置跟踪一致性"


图17
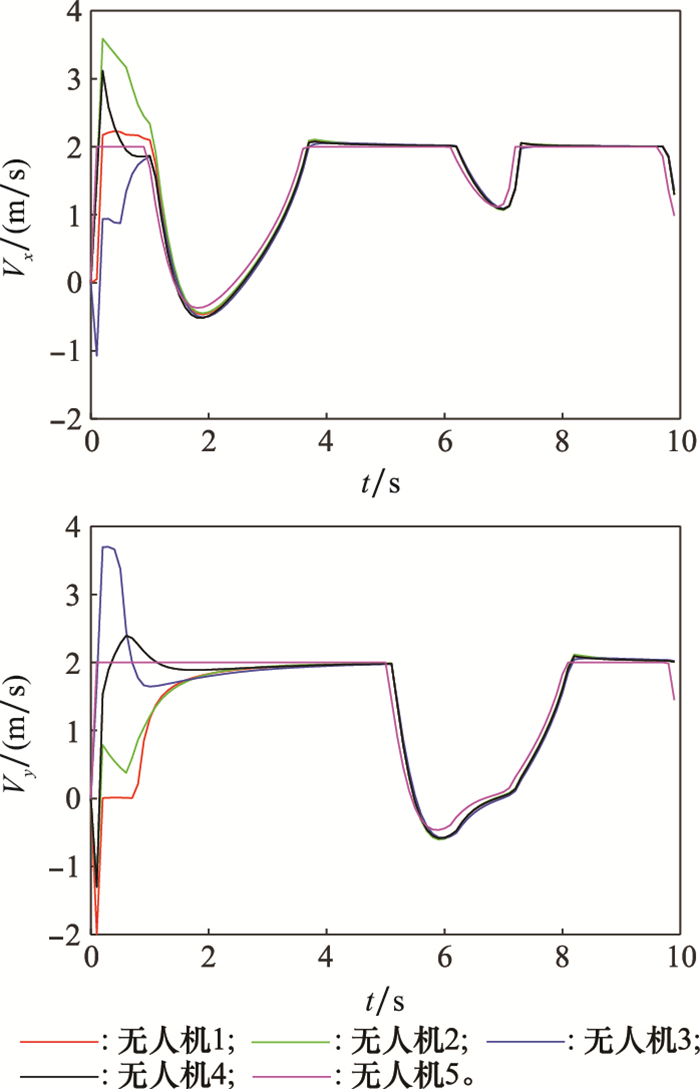
无人机编队系统速度跟踪一致性"
| 1 |
REZAEE H , ABDOLLAHI F . A decentralized cooperative control scheme with obstacle avoidance for a team of mobile robots[J]. IEEE Trans.on Industrial Electronics, 2014, 61 (1): 347- 354.
doi: 10.1109/TIE.2013.2245612 |
| 2 | RANJBAR-SAHRAEI B , SHABANINIA F , NEMATI A , et al. A novel robust decentralized adaptive fuzzy control for swarm formation of multiagent systems[J]. IEEE Trans.on Industrial Electronics, 2016, 59 (8): 3124- 3134. |
| 3 |
OH K K , PARK M C , AHN H S . A survey of multi-agent formation control[J]. Automatica, 2015, 53, 424- 440.
doi: 10.1016/j.automatica.2014.10.022 |
| 4 | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44 (9): 2840- 2848. |
| SUN T Y , SUN W , WU J J . UAV formation rapid assembly method based on improved Quatre algorithm[J]. Systems Engineering and Electronics, 2022, 44 (9): 2840- 2848. | |
| 5 | 韦涛. 基于局部行为规则的四旋翼无人机群集编队研究[D]. 上海: 上海交通大学, 2018. |
| WEI T. Local behavioralL rults of quadrotors based on research on swarm formation[D]. Shanghai: Shanghai Jiao Tong University, 2018. | |
| 6 |
李正平, 鲜斌. 基于虚拟结构法的分布式多无人机鲁棒编队控制[J]. 控制理论与应用, 2020, 37 (11): 2423- 2431.
doi: 10.7641/CTA.2020.00080 |
|
LI Z P , XIAN B . Robust distributed formation control of multiple unmanned aerial vehicles based on virtual structure[J]. Control Theory & Applications, 2020, 37 (11): 2423- 2431.
doi: 10.7641/CTA.2020.00080 |
|
| 7 | 刘昕彤. 动态环境下多无人机协同控制技术研究[D]. 成都: 电子科技大学, 2017. |
| LIU X T. Research of multiple UAVs'cooperative control under dynamic environment[D]. Chengdu: University of Electronic Science and Technology of China, 2017. | |
| 8 |
ZHANG J L , YAN J G , ZHANG P . Multi-UAV formation control based on a novel back-stepping approach[J]. IEEE Trans.on Vehicular Technology, 2020, 69 (3): 2437- 2448.
doi: 10.1109/TVT.2020.2964847 |
| 9 |
YAN W S , FANG X P , LI J B . Formation optimization for UAV localization with range-dependent measurements noise[J]. IEEE Communications Letters, 2014, 18 (9): 1579- 1582.
doi: 10.1109/LCOMM.2014.2344033 |
| 10 |
NIGAM N , BIENIAWSKI S , KROO I , et al. Control of multiple UAVs for persistent surveillance: algorithm and flight test results[J]. IEEE Trans.on Control Systems Technology, 2012, 20 (5): 1236- 1251.
doi: 10.1109/TCST.2011.2167331 |
| 11 |
ZHENG R H , LIU Y H , SUN D . Enclosing a target by nonholonomic mobile robots with bearing-only measurements[J]. Automatica, 2015, 53, 400- 407.
doi: 10.1016/j.automatica.2015.01.014 |
| 12 | 张毅, 方国伟, 杨秀霞. 具有性能预设的多机编队目标跟踪控制[J]. 系统工程与电子技术, 2021, 43 (4): 1069- 1079. |
| ZHANG Y , FANG G W , YANG X X . Target tracking control of multi-UAV formation with prescribed performance guarantees[J]. Systems Engineering and Electronics, 2021, 43 (4): 1069- 1079. | |
| 13 | GAO K , ZHANG Y L , WANG Y L . Development status of typical UAV systems in emerging countries[J]. Aerospace Technology, 2014, 18 (8): 21- 24. |
| 14 | 吴宇, 梁天骄. 基于改进一致性算法的无人机编队控制[J]. 航空学报, 2020, 41 (9): 172- 190. |
| WU Y , LIANG T J . Improved consensus-based algorithm for unmanned aerial vehicle formation control[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (9): 172- 190. | |
| 15 | 费思远, 鲜斌, 王岭. 基于群集行为的分布式多无人机编队动态避障控制[J]. 控制理论与应用, 2022, 39 (1): 1- 11. |
| FEI S Y , XIAN B , WANG L . Distributed formation control for multiple unmanned aerial vehicles with dynamic obstacle avoidance based on the flocking behavior[J]. Control Theory & Applications, 2022, 39 (1): 1- 11. | |
| 16 | WANG J N, XIN M. Multi-agent consensus algorithm with obstacle avoidance via optimal control approach[C]//Proc. of the IEEE American Control Conference, 2011, 6: 2783-2788. |
| 17 |
YU J L , DONG X W , LI Q D , et al. Practical time-varying output formation tracking for high-order multi-agent systems with collision avoidance obstacle dodging and connectivity maintenance[J]. Journal of the Franklin Institute, 2019, 356 (12): 5898- 5926.
doi: 10.1016/j.jfranklin.2019.05.014 |
| 18 |
ALONSO-MORA J , NAEGELI T , SIEGWART R , et al. Co-llision avoidance for aerial vehicles in multi-agent scenarios[J]. Autonomous Robots, 2015, 39 (1): 101- 121.
doi: 10.1007/s10514-015-9429-0 |
| 19 | KURIKI Y, NAMERIKAWA T. Consensus-based cooperative formation control with collision avoidance for a multi-UAV system[C]//Proc. of the American Control Conference, 2014: 2077-2082. |
| 20 | WU Y , GOU J Z , HU X T , et al. A new consensus theory-based method for formation control and obstacle avoidance of UAVs[J]. Aerospace Science and Technology, 2020, 107 (1): 1- 18. |
| 21 | ZENG J, ZHANG B K, SREENATH K. Safety-critical model predictive control with discrete-time control barrier function[C]//Proc. of the American Control Conference, 2021: 3882-3889. |
| 22 | 邵壮, 祝小平, 周洲, 等. 三维动态环境下多无人机编队分布式保持控制[J]. 控制与决策, 2016, 31 (6): 1065- 1072. |
| SHAO Z , ZHU X P , ZHOU Z , et al. Distributed formation keeping control of UAVs in 3D dynamic environment[J]. Control and Decision, 2016, 31 (6): 1065- 1072. | |
| 23 |
ONG C J , WANG Z , DEHGHAN M . Model predictive control for switching systems with dwell-time restriction[J]. IEEE Trans.on Automatic Control, 2016, 61 (12): 4189- 4195.
doi: 10.1109/TAC.2016.2552062 |
| 24 |
DAI L , CAO Q , XIA Y Q . Distributed MPC for formation of multi-agent systems with collision avoidance and obstacle avoidance[J]. Journal of the Franklin Institute, 2017, 354 (4): 2068- 2085.
doi: 10.1016/j.jfranklin.2016.12.021 |
| 25 | HE D F , QIU T X , LU L Y . Input-to-state stability of contractive EMPC of non-linear systems with bounded disturbances[J]. IET Control Theory & Applications, 2019, 13 (5): 651- 658. |
| 26 | 马鸣宇, 董朝阳, 马思迁, 等. 基于SO(3)的多四旋翼无人机编队协同控制[J]. 控制理论与应用, 2018, 35 (9): 1229- 1238. |
| MA M Y , DONG C Y , MA S Q , et al. Coordinated control of multiple quadrotors formation on SO(3)[J]. Control Theory & Applications, 2018, 35 (9): 1229- 1238. | |
| 27 | ZHOU K M , MAO J Q , ZHONG Y S , et al. Robust optimal control[M]. Beijing: National Defense Industry Press, 2002. |
| 28 | PRACH A , KAYACAN E . An MPC-based position controller for a tilt-rotor tricopter VTOL UAV[J]. Optimal Control Application & Methods, 2018, 39 (1): 343- 356. |
| 29 | ZOU T , DING B C , ZHANG R . Introduction to model predictive control engineering applications[M]. Beijing: Chemical Industry Press, 2010. |
| 30 | ILLE M, NAMERIKAWA T. Collision avoidance between multiUAV systems considering formation control using MPC[C]//Proc. of the IEEE International Conference on Advanced Intelligent Mechatronics, 2017: 651-656. |
| [1] | 张宏, 吴云华, 钟胜钧, 郭海波. 基于反步法的空间目标复合指向控制方法研究[J]. 系统工程与电子技术, 2023, 45(9): 2884-2893. |
| [2] | 徐文丰, 李颖晖, 裴彬彬, 禹志龙. 基于多模型MPC的变体飞机协调优化控制[J]. 系统工程与电子技术, 2023, 45(9): 2902-2911. |
| [3] | 宋超, 李波, 马云红, 黄晶益. 基于优化A*和MPC融合算法的三维无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(12): 3995-4004. |
| [4] | 柳子然, 戴梓健, 岳程斐, 王培基, 曹喜滨. 基于高斯混合过程的空间机器人任务空间预测控制方法[J]. 系统工程与电子技术, 2023, 45(11): 3597-3605. |
| [5] | 孙田野, 孙伟, 吴建军. 改进Quatre算法的无人机编队快速集结方法[J]. 系统工程与电子技术, 2022, 44(9): 2840-2848. |
| [6] | 胥彪, 李翔, 李爽, 张金鹏. 基于非线性模型预测控制的火星大气进入智能制导方法[J]. 系统工程与电子技术, 2021, 43(7): 1943-1953. |
| [7] | 王晓海, 孟秀云, 李传旭. 基于MPC的无人机航迹跟踪控制器设计[J]. 系统工程与电子技术, 2021, 43(1): 191-198. |
| [8] | 杨宇, 吴达, 高峰, 邓建军. 适用于超低空拦截的复合制导律设计方法[J]. 系统工程与电子技术, 2021, 43(1): 208-215. |
| [9] | 朱梦圆, 吕娜, 陈柯帆, 钟赟, 刘创, 高维廷. 航空集群协同搜索马尔可夫运动目标方法[J]. 系统工程与电子技术, 2019, 41(9): 2041-2047. |
| [10] | 宋敏, 戴静, 孔韬. 基于NMPC的无人机自主防撞控制方法[J]. 系统工程与电子技术, 2019, 41(9): 2092-2099. |
| [11] | 王超, 张胜修, 宋仔标, 杨建业, 吴晓露. 飞行器抗饱和鲁棒自适应非线性模型预测控制[J]. 系统工程与电子技术, 2018, 40(2): 393-400. |
| [12] | 黄伟, 徐建城, 吴华兴, 李俊兵. 基于参数优化的导弹编队控制一致性算法[J]. 系统工程与电子技术, 2018, 40(11): 2528-. |
| [13] | 盖俊峰, 赵国荣, 宋超. 基于线性近似和神经网络逼近的模型预测控制[J]. 系统工程与电子技术, 2015, 37(2): 394-399. |
| [14] | 唐贤伦,李洋,李鹏,张毅. 基于多Agent粒子群优化的多步SVR模型预测控制[J]. 系统工程与电子技术, 2014, 36(5): 958-964. |
| [15] | 祁晓明, 魏瑞轩, 沈东, 茹常剑, 周欢. 基于运动目标预测的多无人机分布式协同搜索[J]. 系统工程与电子技术, 2014, 36(12): 2417-2425. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||