
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (5): 1738-1751.doi: 10.12305/j.issn.1001-506X.2026.05.29
胡杰1,2,*, 褚瑞峰1, 朱倚娴3, 陈平1,2, 鲍帆1,2
收稿日期:2025-03-27
出版日期:2026-05-27
发布日期:2026-05-27
通讯作者:
胡杰
作者简介:褚瑞峰(1990—),男,工程师,硕士,主要研究方向为无人机航迹规划、飞行计划调配基金资助:Jie HU1,2,*, Ruifeng CHU1, Yixian ZHU3, Ping CHEN1,2, Fan BAO1,2
Received:2025-03-27
Online:2026-05-27
Published:2026-05-27
Contact:
Jie HU
摘要:
针对复杂多威胁环境中的无人机(unmanned aerial vehicle,UAV) 航迹规划问题,提出一种基于速度暂停粒子群优化(velocity pausing particle swarm optimization,VPPSO)算法的航迹规划方法。首先,构建一个综合考虑UAV运行最优性与安全性需求的目标函数集合,将UAV航迹规划转化为多目标优化问题。其次,在标准粒子群优化算法中引入速度暂停策略、双种群策略、速度方程改进策略,有效平衡算法的全局探索和局部开发能力。最后,利用标准测试函数对VPPSO算法寻优性能进行验证并将其应用于UAV三维航迹规划中。实验结果表明:VPPSO算法具有较强的全局寻优能力,规划的航迹结果性能在比较算法中最优。
中图分类号:
胡杰, 褚瑞峰, 朱倚娴, 陈平, 鲍帆. 基于VPPSO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2026, 48(5): 1738-1751.
Jie HU, Ruifeng CHU, Yixian ZHU, Ping CHEN, Fan BAO. Three-dimensional trajectory planning of UAV based on VPPSO algorithm[J]. Systems Engineering and Electronics, 2026, 48(5): 1738-1751.
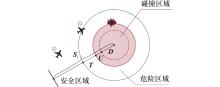
图1
威胁区域的分类"
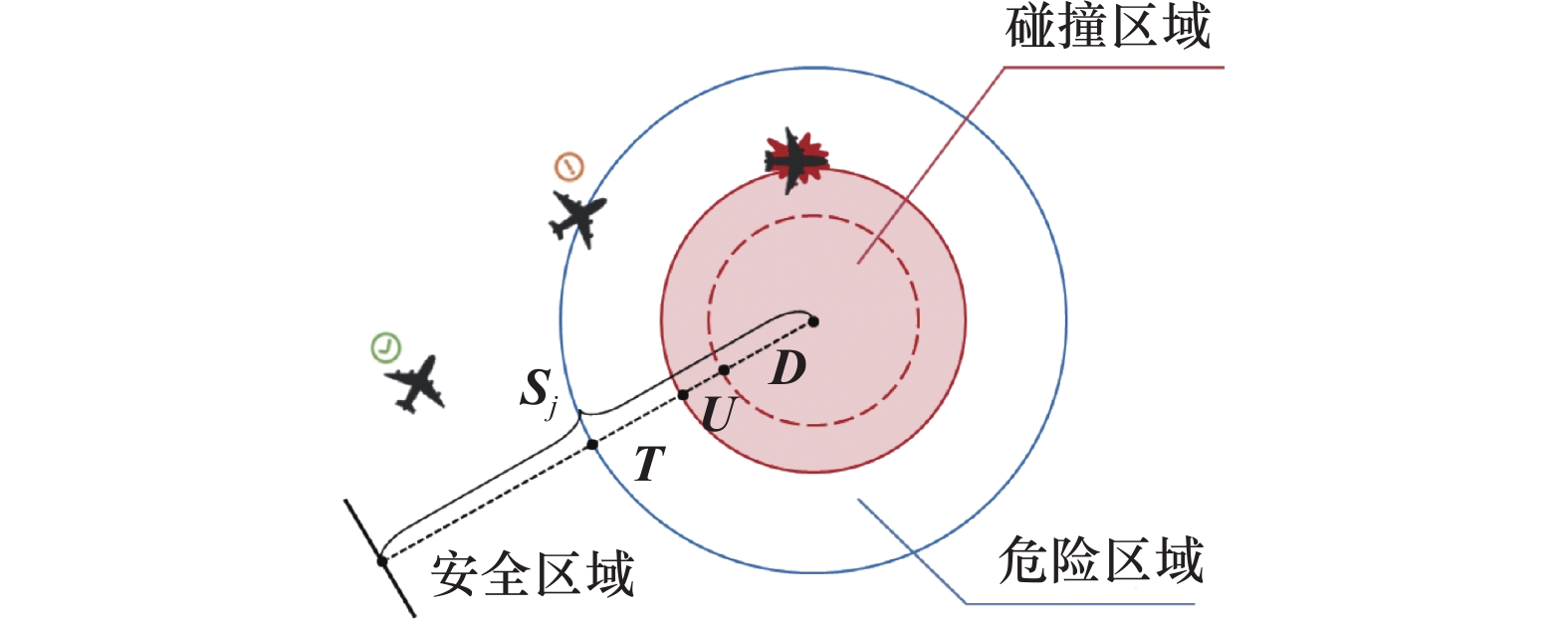

图2
飞行路径及其变量示意图"
图3
高度成本计算示意图"
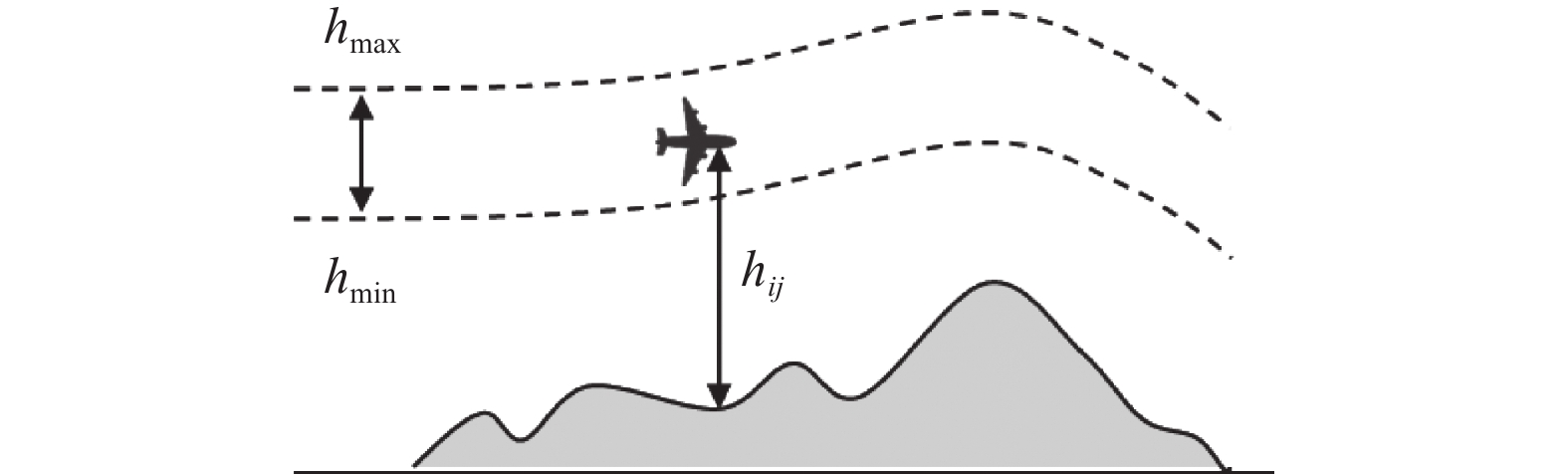

图4
平滑成本计算示意图"
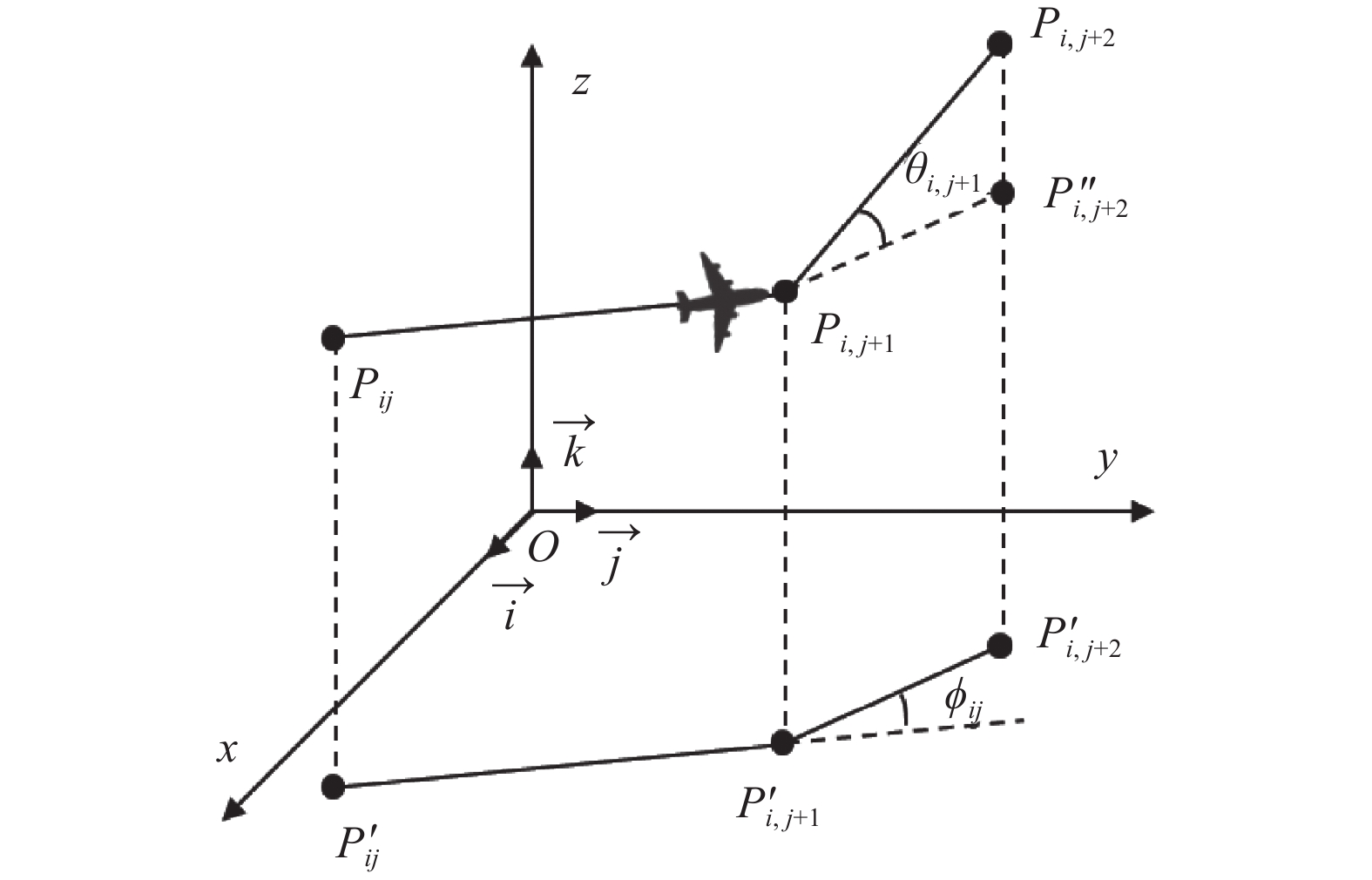
图5
基于VPPSO算法的无人机三维航迹规划流程图"
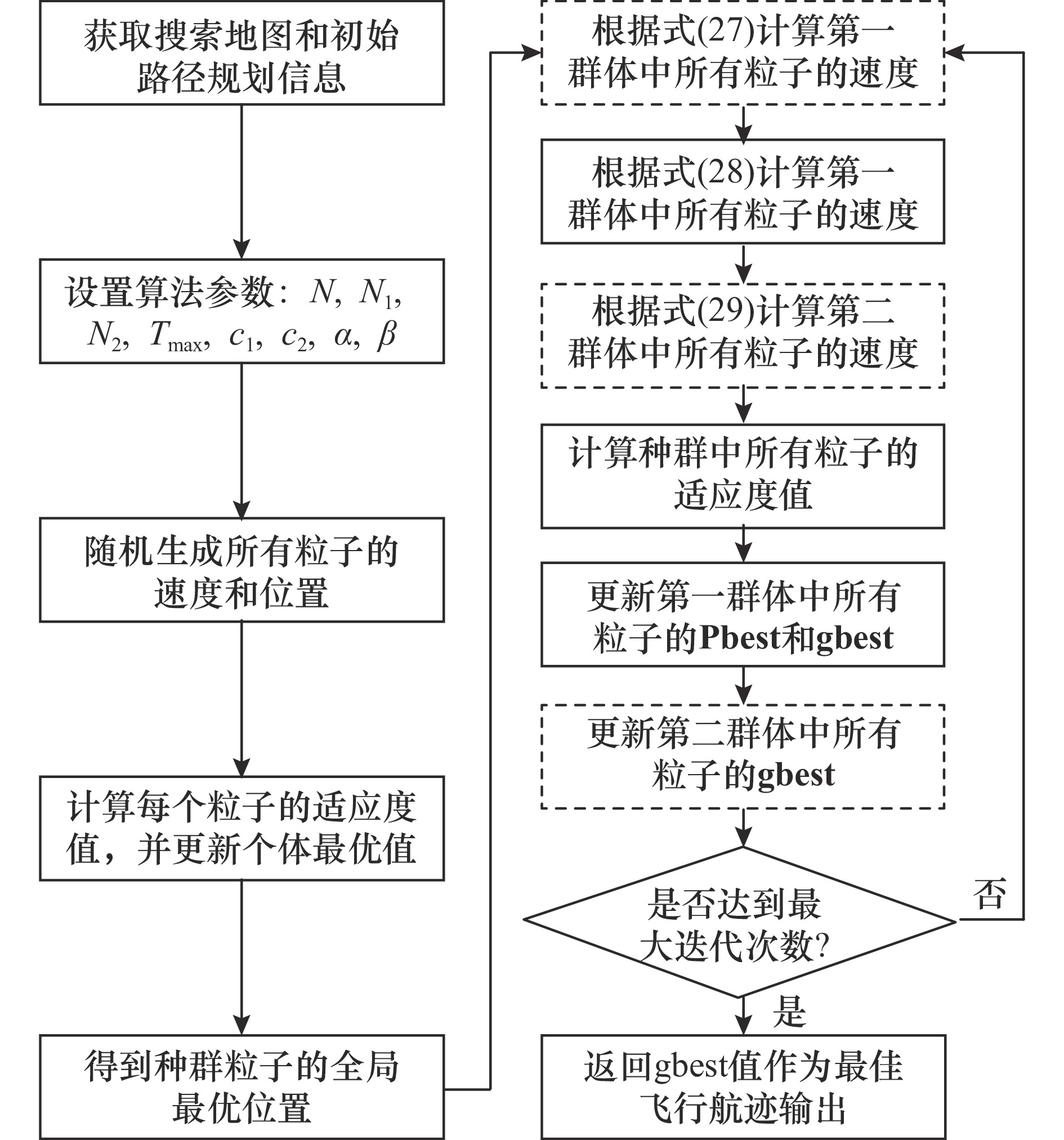
表1
标准测试函数"
| 函数类别 | 函数表达式 | 维度 | 搜索范围 | 理论最优值 |
| 单峰函数 | 30 | [−100, 100] | 0 | |
| 30 | [−10, 10] | 0 | ||
| 30 | [−100, 100] | 0 | ||
| 30 | [−30, 30] | 0 | ||
| 30 | [−100, 100] | 0 | ||
| 30 | [−1.28, 1.28] | 0 | ||
| 多峰函数 | 30 | [−500, 500] | − | |
| 30 | [−5.12, 5.12] | 0 | ||
| 30 | [−32, 32] | 0 | ||
| 30 | [−600, 600] | 0 |
表2
对比算法参数设置"
| 算法 | 参数 | 参数值 |
| VPPSO | N1,N2,c1,c2,α,β | 15、15、2、2、0.3、2.5 |
| 标准PSO | c1,c2 | 2、2 |
| 时变IPSO | wmax,wmin,c1,c2 | 0.9、0.4、2、2 |
| CFPSO | c1,c2 | 2.05、2.05 |
| AsyLnCPSO | c1,c2 | [2.5, 0.5]、[0.5, 2.5] |
表3
算法寻优结果比较"
| 测试函数 | 统计值 | VPPSO | 标准PSO | 时变IPSO | CFPSO | AsyLnCPSO |
| f1 | 平均值 | 0.00 | ||||
| 标准差 | 0.00 | |||||
| f2 | 平均值 | 0.00 | ||||
| 标准差 | 0.00 | |||||
| f3 | 平均值 | 0.00 | ||||
| 标准差 | 0.00 | |||||
| f4 | 平均值 | |||||
| 标准差 | ||||||
| f5 | 平均值 | |||||
| 标准差 | ||||||
| f6 | 平均值 | |||||
| 标准差 | ||||||
| f7 | 平均值 | − | − | − | − | − |
| 标准差 | ||||||
| f8 | 平均值 | 0.00 | ||||
| 标准差 | 0.00 | |||||
| f9 | 平均值 | |||||
| 标准差 | ||||||
| f10 | 平均值 | 0.00 | ||||
| 标准差 | 0.00 |

图6
各算法收敛曲线"
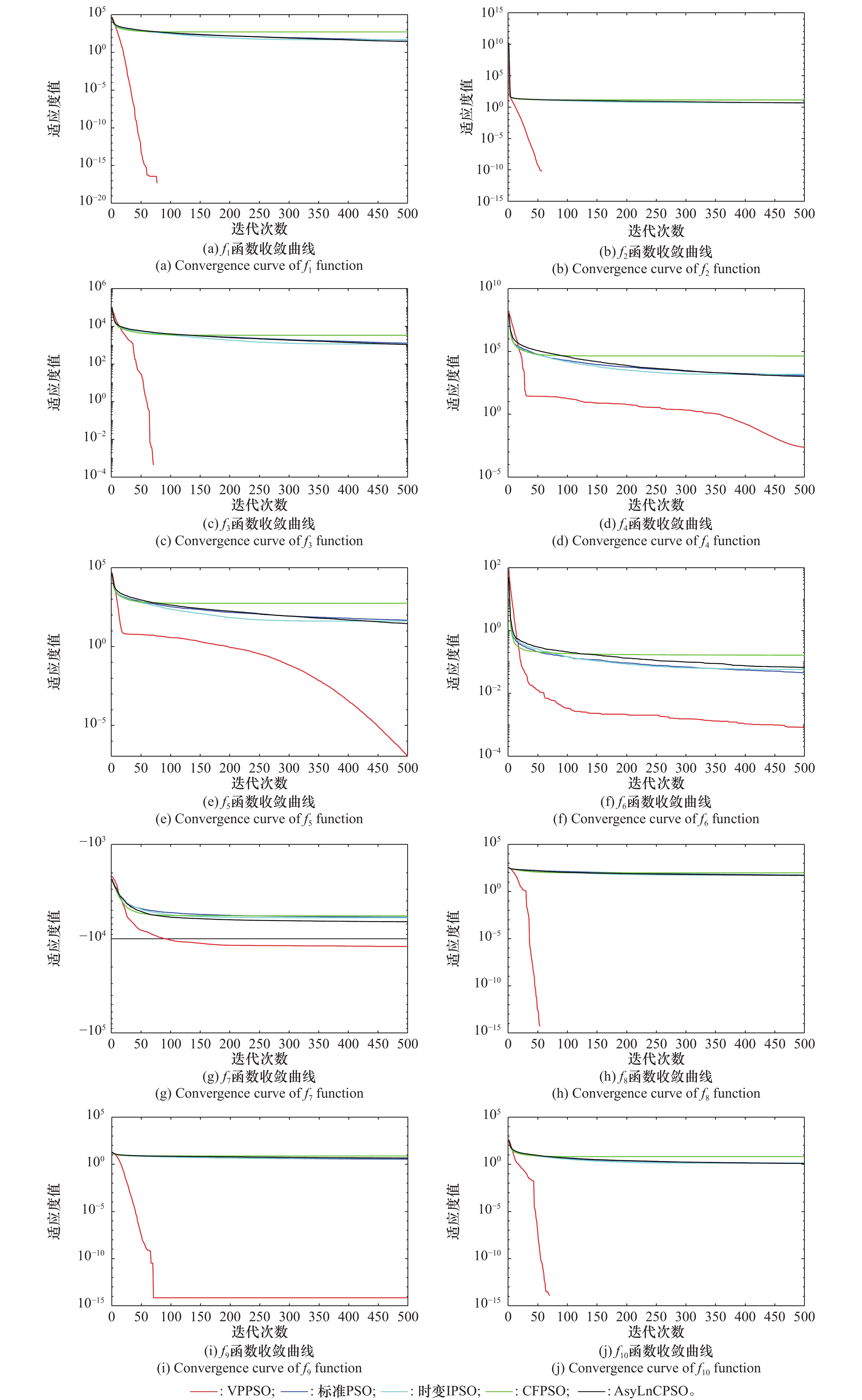

图7
4组场景下不同算法航迹规划俯视图对比(n=12)"
图8
4组场景下不同算法收敛曲线对比(n=12)"
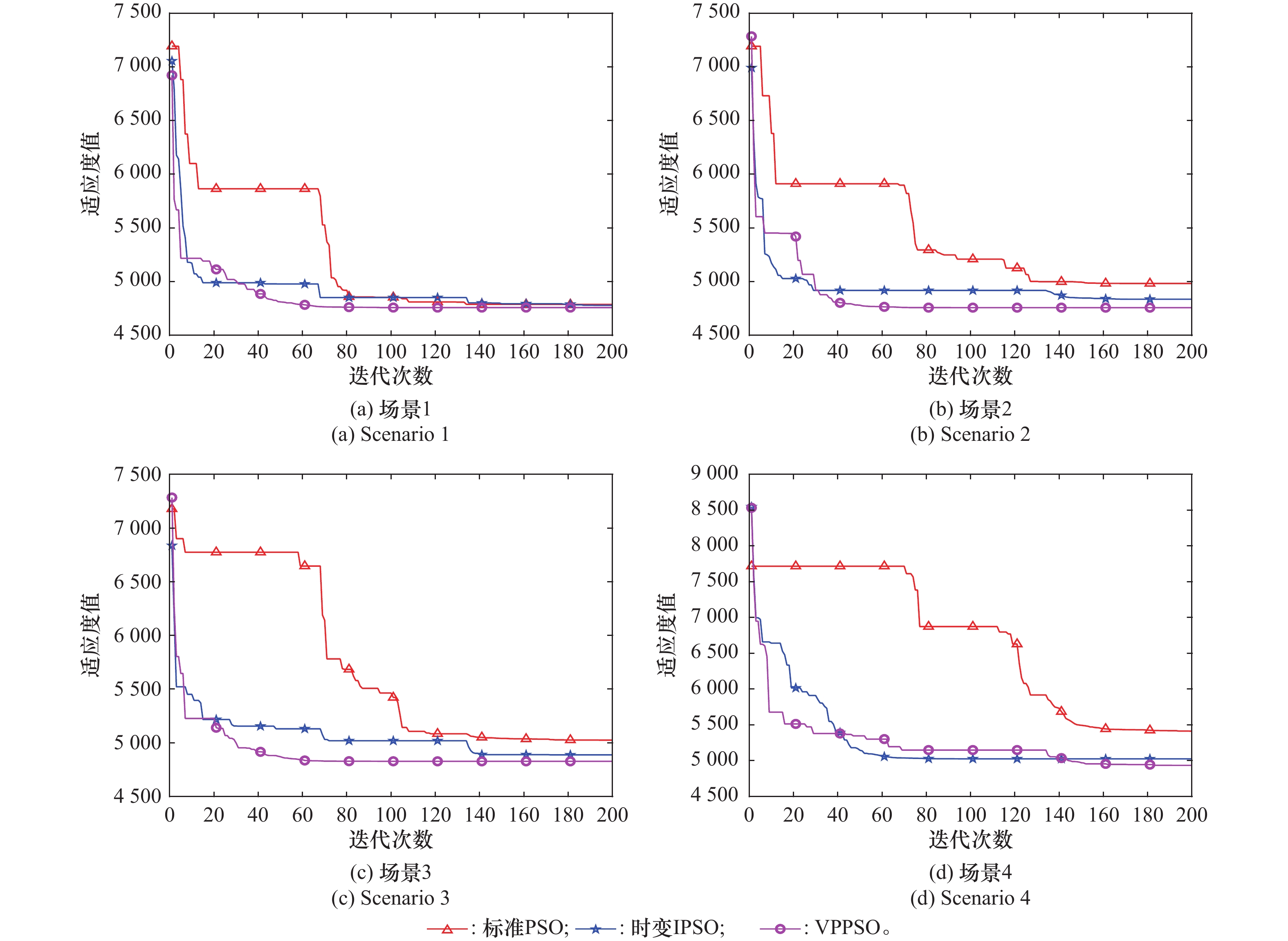
表4
3种不同算法生成的航迹总体成本对比(n=12)"
| 场景 | 标准PSO | 时变IPSO | VPPSO | ||||||||
| 平均值 | 标准差 | 时效性 | 平均值 | 标准差 | 时效性 | 平均值 | 标准差 | 时效性 | |||
| 1 | 52 | 19.45 | 45 | 20.12 | 24 | 18.11 | |||||
| 2 | 62 | 20.19 | 49 | 21.22 | 31 | 19.67 | |||||
| 3 | 72 | 23.56 | 59 | 24.17 | 40 | 22.35 | |||||
| 4 | 90 | 26.18 | 71 | 27.30 | 58 | 24.50 | |||||
图9
4组场景下不同算法航迹规划俯视图对比(n=22)"

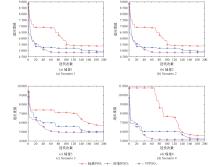
图10
4组场景下不同算法收敛曲线对比(n=22)"
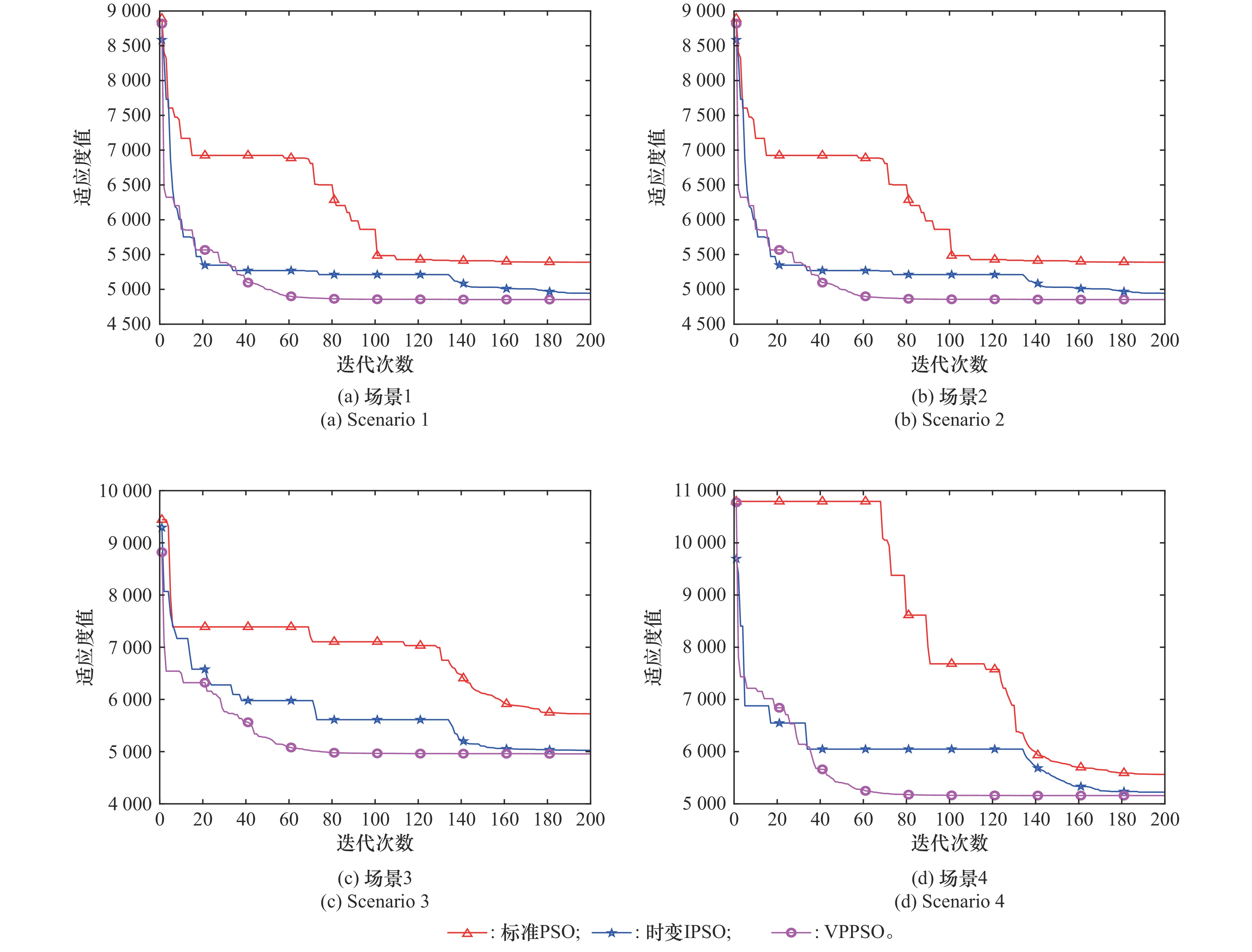
表5
3种不同算法生成的航迹总体成本对比(n=22)"
| 场景 | 标准PSO | 时变IPSO | VPPSO | ||||||||
| 平均值 | 标准差 | 时效性 | 平均值 | 标准差 | 时效性 | 平均值 | 标准差 | 时效性 | |||
| 1 | 56 | 27.11 | 43 | 27.86 | 35 | 26.25 | |||||
| 2 | 59 | 27.83 | 61 | 28.57 | 52 | 27.03 | |||||
| 3 | 68 | 30.24 | 72 | 31.06 | 59 | 29.81 | |||||
| 4 | 99 | 32.37 | 80 | 33.11 | 71 | 31.96 | |||||
| 1 |
HE Y, HOU T C, WANG M R. A new method for unmanned aerial vehicle path planning in complex environments[J]. Scientific Reports, 2024, 14, 9257.
doi: 10.1038/s41598-024-60051-4 |
| 2 |
DEBNATH D, VANEGAS F, SANDINO J, et al. A review of UAV path-planning algorithms and obstacle avoidance methods for remote sensing applications[J]. Remote Sensing, 2024, 16, 4019.
doi: 10.3390/rs16214019 |
| 3 |
LI J, XIONG Y H, SHE J H. UAV path planning for target coverage task in dynamic environment[J]. IEEE Internet of Things Journal, 2023, 10 (20): 17734- 17745.
doi: 10.1109/JIOT.2023.3277850 |
| 4 |
PUENTE-CASTRO A, RIVERO D, PAZOS A, et al. A review of artificial intelligence applied to path planning in UAV swarms[J]. Neural Computing and Applications, 2022, 34, 153- 170.
doi: 10.1007/s00521-021-06569-4 |
| 5 |
DEBNATH D, HAWARY A F, RAMDAN M I, et al. QuickNav: an effective collision avoidance and path-planning algorithm for UAS[J]. Drones, 2023, 7, 678.
doi: 10.3390/drones7110678 |
| 6 | YANG L, TAN L, ZHANG F Q. UAV 3D trajectory planning based on improved A* algorithm and differential evolution[J]. Journal of Network Intelligence, 2023, 8 (4): 1150- 1163. |
| 7 |
WU T, ZHANG Z, JING F, et al. A dynamic path planning method for UAVs based on improved in-formed-RRT* fused dynamic windows[J]. Drones, 2024, 8, 539.
doi: 10.3390/drones8100539 |
| 8 |
唐宇洋, 郑恩辉, 邱潇. 基于优化双向A*与人工势场法的无人机三维航迹规划[J]. 空军工程大学学报, 2024, 25 (5): 69- 75.
doi: 10.3969/j.issn.2097-1915.2024.05.009 |
|
TANG Y Y, ZHENG E H, QIU X. 3D UAV trajectory planning based on optimized bidirectional A* and artificial potential field method[J]. Journal of Air Force Engineering University, 2024, 25 (5): 69- 75.
doi: 10.3969/j.issn.2097-1915.2024.05.009 |
|
| 9 |
PEHLIVANOGLU Y V, PEHLIVANOGLU P. An enhanced genetic algorithm for path planning of autonomous UAV in target coverage problems[J]. Applied Soft Computing, 2021, 112, 107796.
doi: 10.1016/j.asoc.2021.107796 |
| 10 |
LIN S Q, LI F F, LI X Y, et al. Improved artificial bee colony algorithm based on multi-strategy synthesis for UAV path planning[J]. IEEE Access, 2022, 10, 119269.
doi: 10.1109/ACCESS.2022.3218685 |
| 11 | 朱润泽, 赵静, 蒋国平, 等. 基于改进粒子群算法的无人机三维路径规划[J]. 南京邮电大学学报(自然科学版), 2024, 44 (6): 120- 127. |
| ZHU R Z, ZHAO J, JIANG G P, et al. UAV 3D path planning based on improved particle swarm optimization algorithm[J]. Journal of Nanjing University of Posts and Telecommunications (Natural Science Edition), 2024, 44 (6): 120- 127. | |
| 12 | QI D, ZHANG Z H, ZHANG Q R. Path planning of multirotor UAV based on the improved ant colony algorithm[J]. Journal of Robotics, 2022, 2022, 2168964. |
| 13 |
PHUNG M D, QUACH C H, DINH T H, et al. Enhanced discrete particle swarm optimization path planning for UAV vision-based surface inspection[J]. Automation in Construction, 2017, 81, 25- 33.
doi: 10.1016/j.autcon.2017.04.013 |
| 14 | 宋志强, 夏庆锋, 陈少博, 等. 基于改进球面向量粒子群优化的UAV航迹规划[J]. 电光与控制, 2023, 30 (4): 56- 60. |
| SONG Z Q, XIA Q F, CHEN S B, et al. UAV path planning with improved spherical vector based particle swarm optimization[J]. Electronics Optics & Control, 2023, 30 (4): 56- 60. | |
| 15 |
LIU Y F, ZHANG H, ZHENG H, et al. A spherical vector-based adaptive evolutionary particle swarm optimization for UAV path planning under threat conditions[J]. Scientific Reports, 2025, 15, 2116.
doi: 10.1038/s41598-025-85912-4 |
| 16 | LYU L X, YANG F. MMPA: a modified marine predator algorithm for 3D UAV path planning in complex environments with multiple threats[J]. Expert Systems with Applications, 2024, 257, 124955. |
| 17 | 隋东, 杨振宇, 丁松滨, 等. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46 (5): 1756- 1766. |
| SUI D, YANG Z Y, DING S B, et al. Three-dimensional path planning of UAV based on EMSDBO algorithm[J]. Systems Engineering and Electronics, 2024, 46 (5): 1756- 1766. | |
| 18 |
NIU B, WANG Y J, LIU J, et al. Path planning for unmanned aerial vehicles in complex environment based on an improved continuous ant colony optimization[J]. Computers and Electrical Engineering, 2025, 123, 110034.
doi: 10.1016/j.compeleceng.2024.110034 |
| 19 |
DUONG T T N, BUI D N, PHUNG M D. Navigation variable-based multi-objective particle swarm optimization for UAV path planning with kinematic constraints[J]. Neural Computing and Applications, 2025, 37, 5683- 5697.
doi: 10.1007/s00521-024-10945-1 |
| 20 |
YANG J Q, YAN F, ZHANG J, et al. Hybrid chaos game and grey wolf optimization algorithms for UAV path planning[J]. Applied Mathematical Modelling, 2025, 142, 115979.
doi: 10.1016/j.apm.2025.115979 |
| 21 |
王飞, 杨清平. 基于改进粒子群算法的城市物流无人机路径规划[J]. 科学技术与工程, 2023, 23 (30): 13187- 13194.
doi: 10.12404/j.issn.1671-1815.2023.23.30.13187 |
|
WANG F, YANG Q P. Route planning of urban logistics unmanned aerial vehicle based on improved particle swarm optimization algorithm[J]. Science Technology and Engineering, 2023, 23 (30): 13187- 13194.
doi: 10.12404/j.issn.1671-1815.2023.23.30.13187 |
|
| 22 |
SHAMI T M, EL-SALEH A A, ALSWAITTI M, et al. Particle swarm optimization: a comprehensive survey[J]. IEEE Access, 2022, 10, 10031- 10061.
doi: 10.1109/ACCESS.2022.3142859 |
| 23 | 张姝, 汤淼. 改进PSO算法及在无人机路径规划中的应用[J]. 计算机系统应用, 2023, 32 (3): 330- 337. |
| ZHANG S, TANG M. Improved PSO algorithm and its application in route planning of UAV[J]. Computer Systems & Applications, 2023, 32 (3): 330- 337. | |
| 24 | SHI Y, EBERHART R C. A modified particle swarm optimizer[C]//Proc. of the IEEE International Conference on Evolutionary Computation Proceedings, 1998. |
| 25 | SHI Y, EBERHART R C. Empirical study of particle swarm optimization[C]//Proc. of the Congress on Evolutionary Computation, 1999. |
| 26 |
CLERC M, KENNEDY J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space[J]. IEEE Trans. on Evolutionary Computation, 2002, 6 (1): 58- 73.
doi: 10.1109/4235.985692 |
| 27 |
RATNAWEERA A, HALGAMUGE S K, WATSON H C. Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients[J]. IEEE Trans. on Evolutionary Computation, 2004, 8 (3): 240- 255.
doi: 10.1109/TEVC.2004.826071 |
| 28 |
远翔宇, 杨风暴, 杨童瑶. 基于自适应蜣螂算法的无人机三维路径规划方法[J]. 无线电工程, 2024, 54 (4): 928- 936.
doi: 10.3969/j.issn.1003-3106.2024.04.016 |
|
YUAN X Y, YANG F B, YANG T Y. UAV 3D path planning method based on adaptive dung beetle algorithm[J]. Radio Engineering, 2024, 54 (4): 928- 936.
doi: 10.3969/j.issn.1003-3106.2024.04.016 |
|
| 29 |
WANG X F, ZHAO H, HAN T, et al. A grey wolf optimizer using Gaussian estimation of distribution and its application in the multi-UAV multi-target urban tracking problem[J]. Applied Soft Computing, 2019, 78, 240- 260.
doi: 10.1016/j.asoc.2019.02.037 |
| 30 | 蒋翱徽, 刘文红. 基于改进蜣螂优化算法的无人机三维路径规划[J]. 电子测量技术, 2024, 47 (13): 128- 135. |
| JIANG A H, LIU W H. Unmanned aerial vehicle three-dimensional path planning based on improved dung beetle optimization algorithm[J]. Electronic Measurement Technology, 2024, 47 (13): 128- 135. |
| [1] | 刘瑞航, 刘海颖, 刘宇辰, 陈晨, 李铁香. 基于多特征正交约束的无人机跨视角地理定位方法[J]. 系统工程与电子技术, 2026, 48(6): 2072-2080. |
| [2] | 张国庆, 姚桂鹏, 李纪强. 无人机/船协同降落的鲁棒自适应模糊控制[J]. 系统工程与电子技术, 2026, 48(6): 2081-2088. |
| [3] | 林文斌, 时晨光, 严牧, 汪飞, 周建江. 面向欺骗干扰组网雷达的无人机集群稳健航迹规划算法[J]. 系统工程与电子技术, 2026, 48(5): 1551-1563. |
| [4] | 杨秀霞, 姚文强, 张毅, 于浩. 通信约束下多无人机协同搜索航迹优化[J]. 系统工程与电子技术, 2026, 48(5): 1715-1727. |
| [5] | 武愈涵, 吴晓莉, 张欣悦, 晏彪, 王名珺. 面向认知增强的MUM-T态势图视觉调控方法[J]. 系统工程与电子技术, 2026, 48(4): 1292-1302. |
| [6] | 杨志, 郁丰, 林思颖, 周紫君. 基于视觉协同的蜂群自主导航技术[J]. 系统工程与电子技术, 2026, 48(4): 1396-1403. |
| [7] | 谷旭平, 史贤俊. 基于结构分析与树种优化算法的无人机可重构性分析与设计[J]. 系统工程与电子技术, 2026, 48(3): 932-945. |
| [8] | 杨跃能, 孔希, 张士峰, 邓少永. 低空小型旋翼无人机近距拦截捕获方法[J]. 系统工程与电子技术, 2026, 48(3): 1010-1017. |
| [9] | 魏建林, 林彦超, 唐慧龙, 张旺, 王伟. 基于改进MCTS的多无人机多任务联合决策[J]. 系统工程与电子技术, 2026, 48(2): 556-568. |
| [10] | 晏彪, 吴晓莉, 张蓝, 刘潇, 方泽茜, 韩炜毅, 李琦桉. 有人/无人机协同指挥员的事件相关电位特征[J]. 系统工程与电子技术, 2026, 48(2): 578-587. |
| [11] | 张森, 庞岩, 周福亮. 基于改进Informed-RRT*算法的无人机三维路径规划[J]. 系统工程与电子技术, 2026, 48(2): 660-668. |
| [12] | 乔毅涛, 李爽. 空地异构无人系统固定时间事件触发编队包含控制[J]. 系统工程与电子技术, 2026, 48(2): 669-683. |
| [13] | 李淑凤, 韩璐羽. 面向飞机表面巡检的多无人机覆盖路径规划[J]. 系统工程与电子技术, 2026, 48(2): 684-693. |
| [14] | 杨许鑫, 季薇. 无人机辅助的安全MEC系统中的能耗优化策略[J]. 系统工程与电子技术, 2026, 48(2): 719-726. |
| [15] | 林志康, 刘甲磊, 马佳智, 施龙飞, 徐进宝. 利用分布式辐射源闪烁诱偏的抗反辐射方法[J]. 系统工程与电子技术, 2026, 48(1): 1-11. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||