
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (5): 1715-1727.doi: 10.12305/j.issn.1001-506X.2026.05.27
杨秀霞( ), 姚文强(), 张毅(), 于浩()
), 姚文强(), 张毅(), 于浩()
收稿日期:2025-04-02
出版日期:2026-05-27
发布日期:2026-05-27
通讯作者:
姚文强
E-mail:yangxiuxia@126.com;15615750842@163.com;changyee@tom.com;yhao0516@163.com
作者简介:杨秀霞(1975—),女,教授,博士,主要研究方向为飞行器制导与控制基金资助:
Xiuxia YANG(), Wenqiang YAO(), Yi ZHANG(), Hao YU()
Received:2025-04-02
Online:2026-05-27
Published:2026-05-27
Contact:
Wenqiang YAO
E-mail:yangxiuxia@126.com;15615750842@163.com;changyee@tom.com;yhao0516@163.com
摘要:
针对多无人机(unmanned aerial vehicle,UAV)协同目标搜索复杂约束航迹规划问题,提出融合通信距离衰减与障碍物遮挡效应的多约束航迹规划模型,并设计一种混沌自适应周期能量哈里斯鹰优化(chaotic adaptive cycle Harris hawks optimization,CACHHO)算法。首先,在传统的路径长度、机动特性、避障避碰等约束基础上,引入视距(line-of-sight,LOS)与非LOS(none-LOS,NLOS)通信的动态权重机制,通过障碍物穿透损耗模型量化通信质量衰减效应,实现复杂环境下通信约束的精细化建模。其次,通过引进混沌映射、能量周期性递减和权重因子使算法实现全局探索与局部开发的自适应平衡,提高算法跳出局部最优的能力。最后,仿真实验对比显示,CACHHO算法较传统哈里斯鹰算法优化精度提高8.67%,任务成功率提高23%。仿真结果表明,该算法在多UAV协同搜索航迹优化问题具有显著优势,为多UAV在复杂地形中协同搜索提供了理论支撑与技术方案。
中图分类号:
杨秀霞, 姚文强, 张毅, 于浩. 通信约束下多无人机协同搜索航迹优化[J]. 系统工程与电子技术, 2026, 48(5): 1715-1727.
Xiuxia YANG, Wenqiang YAO, Yi ZHANG, Hao YU. Optimization of multi-UAV cooperative search paths under communication constraints[J]. Systems Engineering and Electronics, 2026, 48(5): 1715-1727.

图1
飞行转角示意图"
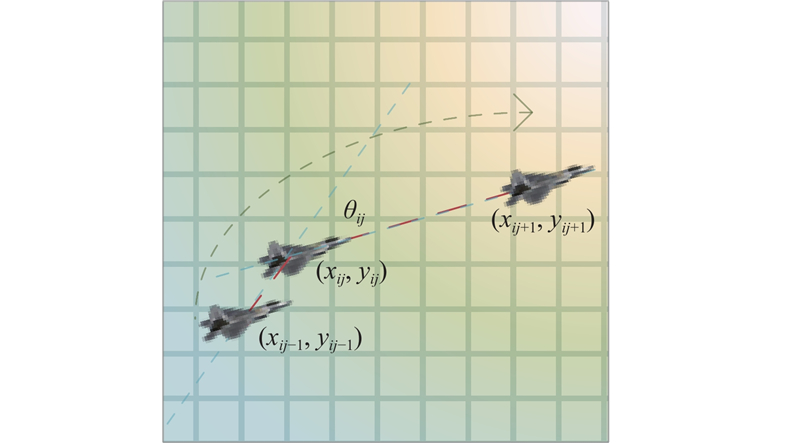

图2
无人机避碰示意图"
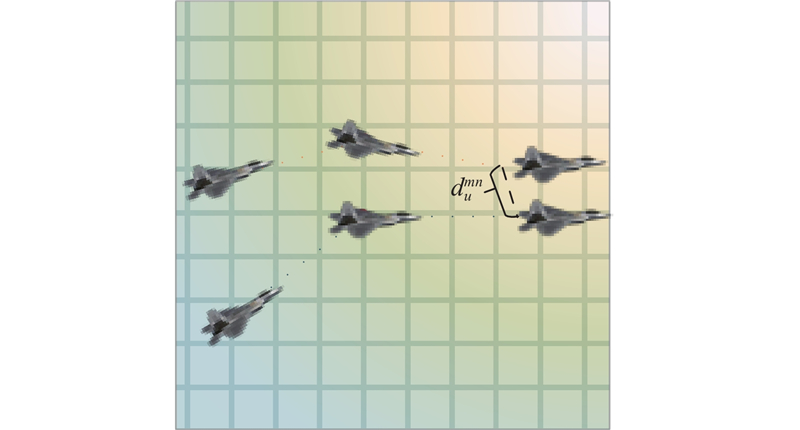
图3
多无人机间通信示意图"
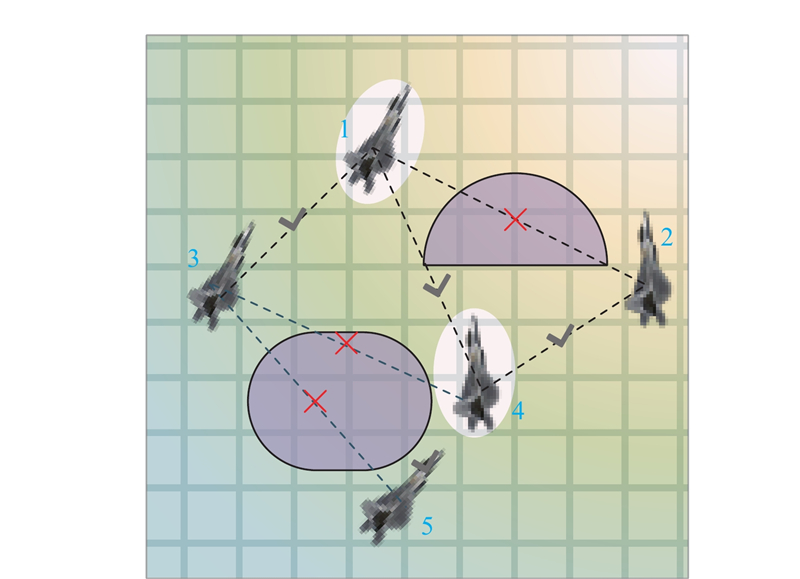
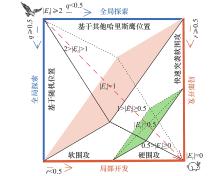
图4
HHO算法"
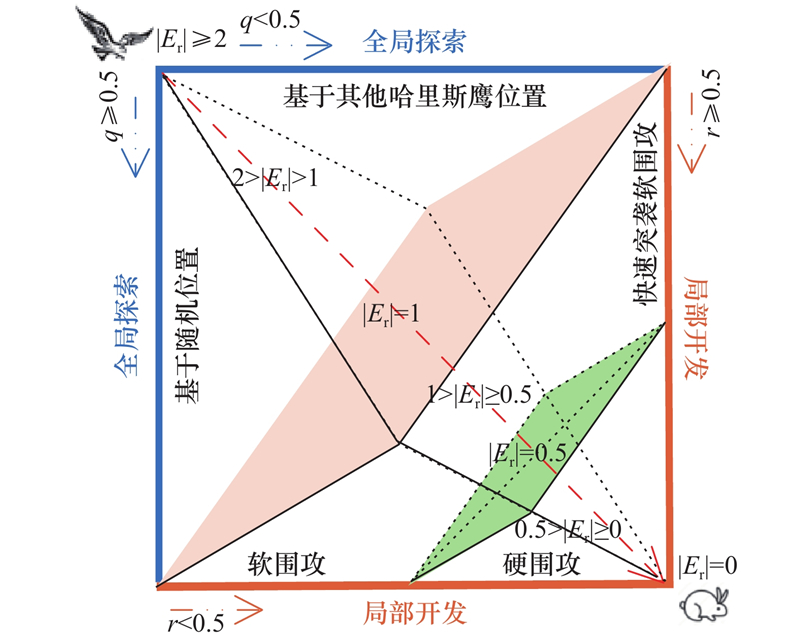
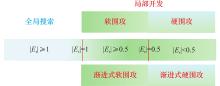
图5
策略选择"
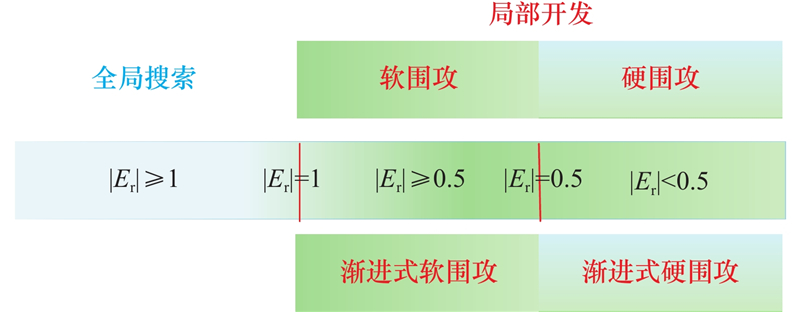
图6
能量因子对比图"
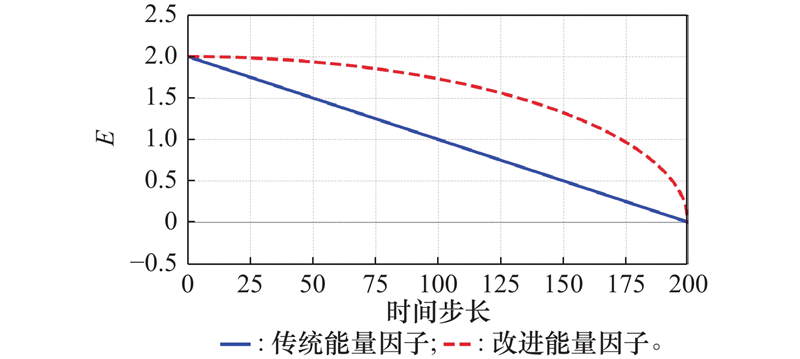
图7
逃逸能量因子对比图"
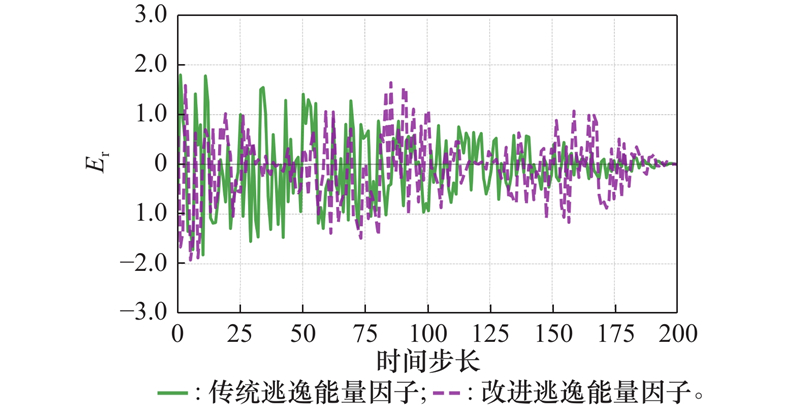
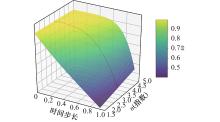
图8
权重因子图"
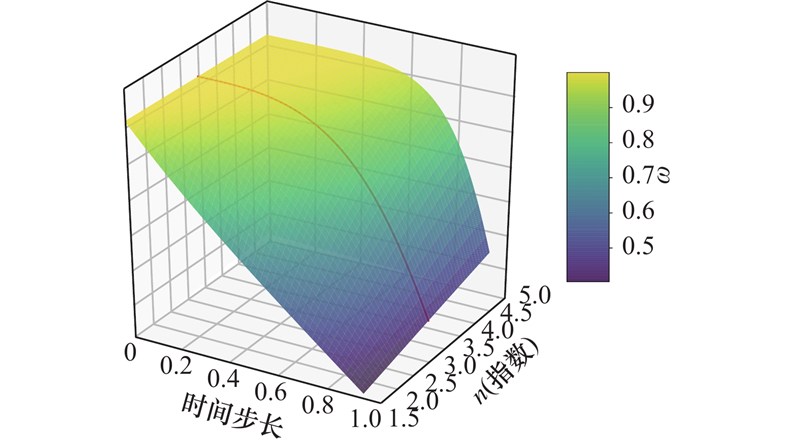
表1
测试函数"
| 测试函数 | 名称 | 特征 | 最小值 | 搜索空间 |
| Sphere | 单峰 | 0 | [−100,100] | |
| Rosenbrock | 单峰 | 0 | [−2.048,2.048] | |
| Schwefel P2.22 | 单峰 | 0 | [−10,10] | |
| Quartic noise | 单峰 | 0 | [−1.28,1.28] | |
| De Jong | 单峰 | 0 | [−1.28,1.28] | |
| Alpine | 多峰 | 0 | [−10,10] | |
| Ackley | 多峰 | 0 | [−32,32] | |
| Schwefel | 多峰 | 0 | [−500,500] | |
| Rastrigin | 多峰 | 0 | [−5.12,5.12] | |
| Noncontinuous Rastrigin | 多峰 | 0 | [−5.12,5.12] | |
| Weierstrass | 多峰 | 0 | [−0.5,0.5] | |
| Penalized 1 | 多峰 | 0 | [−50,50] | |
| Penalized 2 | 多峰 | 0 | [−50,50] |
表2
对比算法参数"
| 算法 | 主要参数 |
| CACHHO | |
| HHO | |
| NHPSO | |
| ABC | |
| WPA | |
| PSO | |
| ACO |
表3
测试数据结果"
| 函数 | CACHHO | NHPSO | HHO | ABC | WPA | PSO | ACO |
| 0.00E+00 | 2.61E−23 | 0.00E+00 | 6.40E−15 | 0.00E+00 | 1.24E+01 | 8.30E+02 | |
| ±0.00E+00 | ±5.03E−23 | ±0.00E+00 | ±1.41E−16 | ±0.00E+00 | ±9.10E−01 | ±8.47E+01 | |
| 2.82E−10 | 2.21E+01 | 6.05E−08 | 2.66E+01 | 2.50E+01 | 3.05E+01 | 1.84E+02 | |
| ±4.74E-09 | ±1.74E+00 | ±9.12E−08 | ±3.31E+01 | ±2.69E+01 | ±5.92E+01 | ±1.16E+01 | |
| 0.00E+00 | 1.12E−15 | 0.00E+00 | 1.96E−13 | 0.00E+00 | 4.58E+00 | 4.72E+01 | |
| ±0.00E+00 | ±1.39E−15 | ±0.00E+00 | ±7.28E−13 | ±0.00E+00 | ±1.02E+00 | ±9.64E+00 | |
| 9.66E−07 | 1.49E−03 | 4.08E−06 | 6.15E−01 | 1.41E−04 | 1.30E−03 | 9.58E−03 | |
| ±1.33E-08 | ±4.74E−04 | ±4.95E−06 | ±7.55E−01 | ±2.76E−04 | ±4.34E−03 | ±8.39E−03 | |
| 0.00E+00 | 6.24E−36 | 0.00E+00 | 1.60E+01 | 0.00E+00 | 0.00E+00 | 5.25E+02 | |
| ±0.00E+00 | ±1.49E−35 | ±0.00E+00 | ±3.60E+01 | ±0.00E+00 | ±0.00E+00 | ±1.77E+02 | |
| 0.00E+00 | 7.93E−12 | 0.00E+00 | 1.81E−01 | 9.40E−323 | 5.09E−01 | 7.09E+00 | |
| ±0.00E+00 | ±2.52E−11 | ±0.00E+00 | ±5.03E−01 | ±8.30E−324 | ±5.94E−01 | ±2.95E+00 | |
| 4.44E−16 | 8.88E−13 | 9.37E−12 | 1.79E+00 | 4.00E−15 | 5.39E+00 | 1.79E+01 | |
| ±3.93E−15 | ±7.09E−13 | ±9.35E−15 | ±1.12E+00 | ±7.08E−14 | ±6.22E+00 | ±5.31E+01 | |
| 3.82E−04 | 1.18E+01 | 3.86E−04 | 1.86E+03 | 6.51E+03 | 6.30E+03 | 2.57E+03 | |
| ±7.59E−04 | ±3.55E+00 | ±3.56E−05 | ±1.03E+02 | ±8.40E+02 | ±3.61E+02 | ±2.59E+02 | |
| 0.00E+00 | 8.93E−08 | 0.00E+00 | 1.31E+01 | 0.00E+00 | 2.12E+01 | 1.90E+02 | |
| ±0.00E+00 | ±5.01E−07 | ±0.00E+00 | ±6.14E+00 | ±0.00E+00 | ±8.88E+00 | ±7.34E+01 | |
| 0.00E+00 | 8.05E−07 | 0.00E+00 | 1.89E+01 | 0.00E+00 | 3.50E+01 | 1.21E+02 | |
| ±0.00E+00 | ±2.17E−06 | ±0.00E+00 | ±1.96E+00 | ±0.00E+00 | ±5.73E+00 | ±1.96E+01 | |
| 0.00E+00 | 0.00E+00 | 0.00E+00 | 2.66E−02 | 0.00E+00 | 9.39E+00 | 1.81E+01 | |
| ±0.00E+00 | ±0.00E+00 | ±0.00E+00 | ±3.27E−02 | ±0.00E+00 | ±1.77E+00 | ±4.20E+00 | |
| 6.51E−10 | 1.05E−24 | 7.65E−08 | 3.56E−21 | 2.32E+01 | 2.60E+00 | 1.81E+01 | |
| ±5.48E−10 | ±1.65E−24 | ±7.20E−08 | ±3.95E−21 | ±7.12E+00 | ±4.89E+00 | ±7.26E+00 | |
| 5.16E−10 | 1.47E−23 | 2.90E−07 | 1.07E−15 | 2.89E−01 | 1.00E−01 | 7.04E+03 | |
| ±3.97E−10 | ±2.68E−23 | ±9.37E−08 | ±5.66E−14 | ±3.08E−02 | ±2.41E−01 | ±9.44E+01 |

图9
测试数据折线误差棒图"
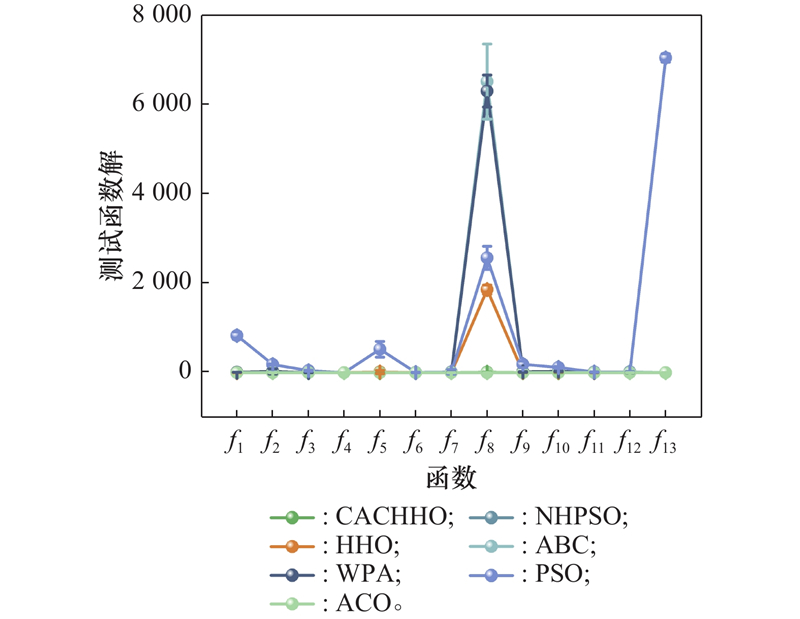
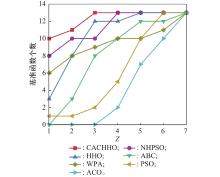
图10
TOP-Z曲线"
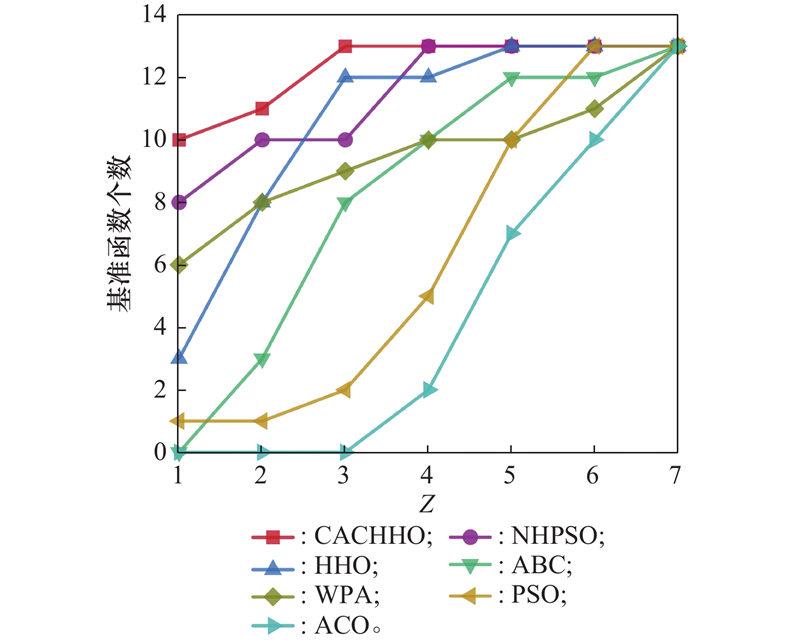
表4
无人机起点和终点"
| 坐标点 | UAV1 | UAV2 | UAV3 | UAV4 | UAV5 |
| (20,80) | (8,60) | (5,47) | (5,40) | (10,20) | |
| (85,50) | (85,50) | (85,50) | (85,50) | (85,50) |
表5
障碍物类型和位置"
| 障碍物序号 | 类型 | 位置 |
| 障碍物1 | 圆形 | (20,55),r=6 |
| 障碍物2 | 圆形 | (65,70),r=6 |
| 障碍物3 | 圆形 | (70,40),r=8 |
| 障碍物4 | 矩形 | (22,32),l=8,w=11 |
| 障碍物5 | 矩形 | (40,60),l=8,w=11 |

图11
飞行航迹图"
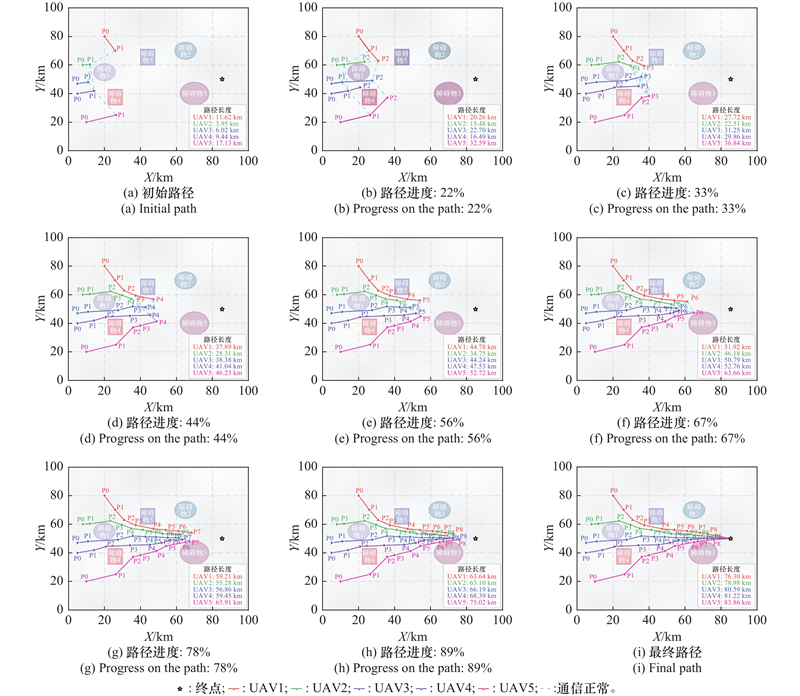

图12
无人机避障距离图"
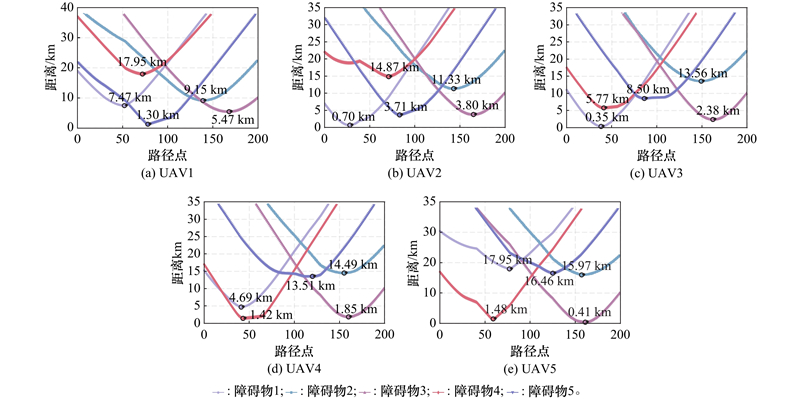
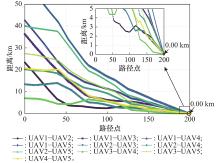
图13
无人机间距离图"
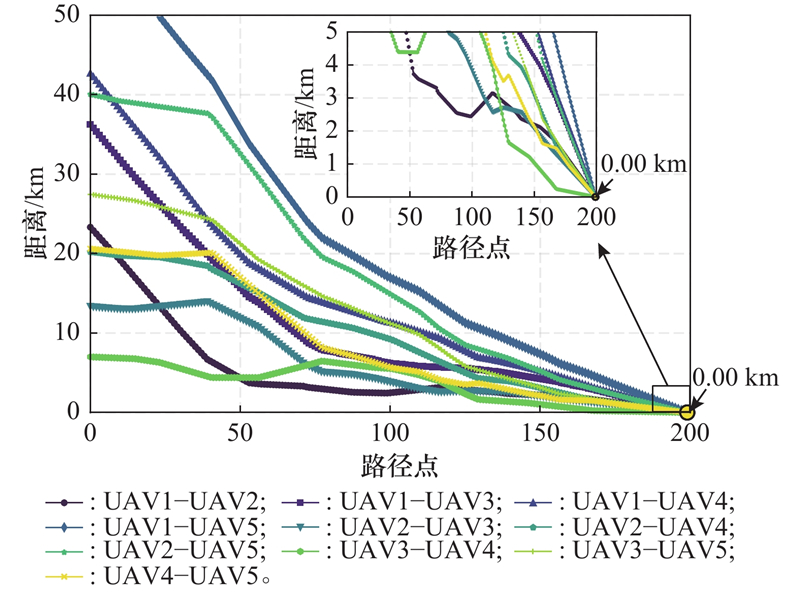
表6
算法对比结果"
| 参数 | CACHHO | HHO | ABC | WPA | PSO | ACO |
| AOFV | 89.12 | 97.58 | 102.41 | 102.72 | 104.27 | 119.44 |
| OOFV | 80.182 | 86.65 | 90.38 | 93.81 | 96.73 | 106.25 |
| WOFV | 103.60 | 111.44 | 126.30 | 125.32 | 129.60 | 150.41 |
| Std | 2.88 | 3.79 | 5.22 | 4.71 | 5.07 | 6.20 |
| IP/% | 25.39 | 18.30 | 13.26 | 14.00 | 12.70 | — |
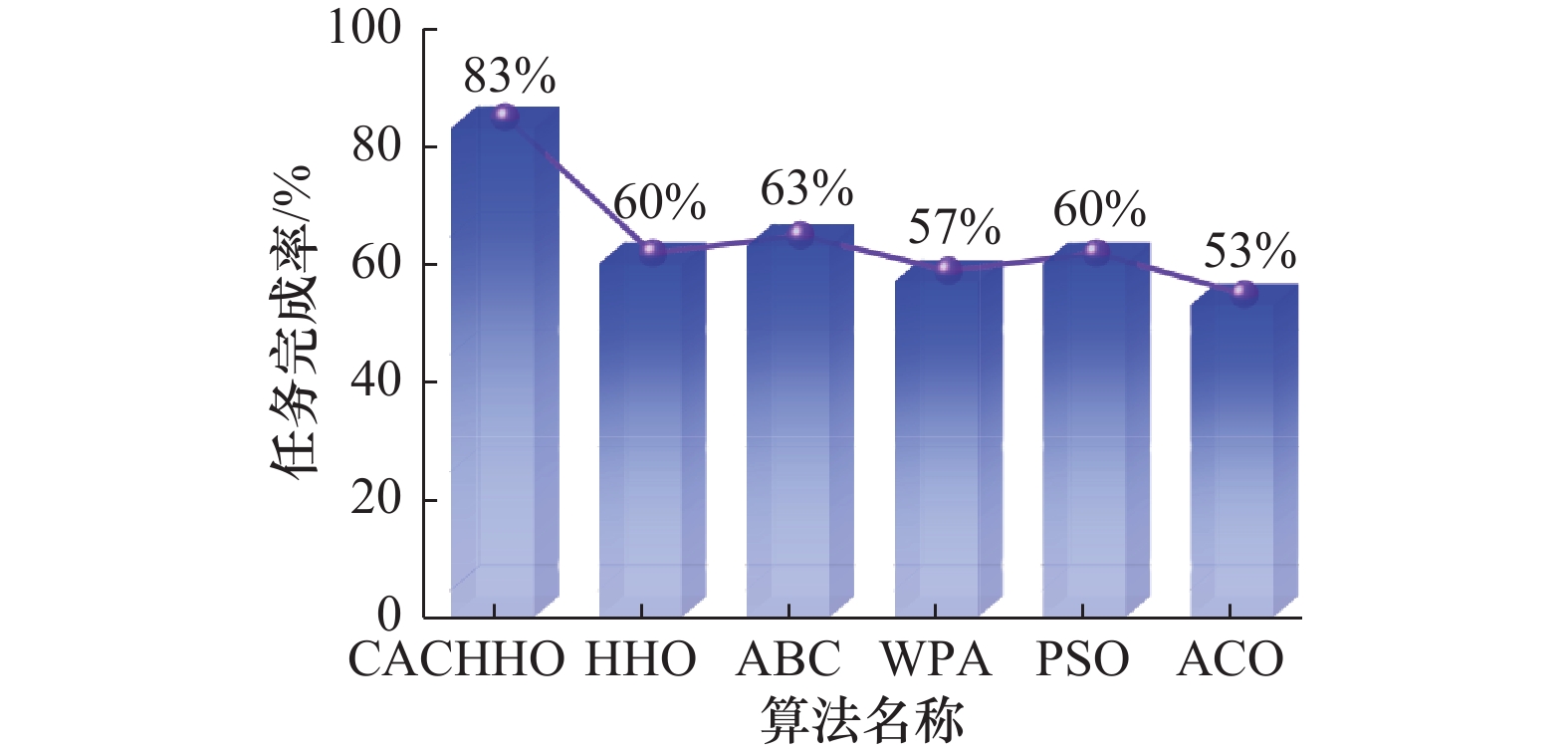
| 任务完成率/% | 83 | 60 | 63 | 57 | 60 | 53 |
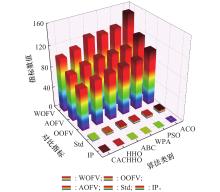
图14
算法对比图"
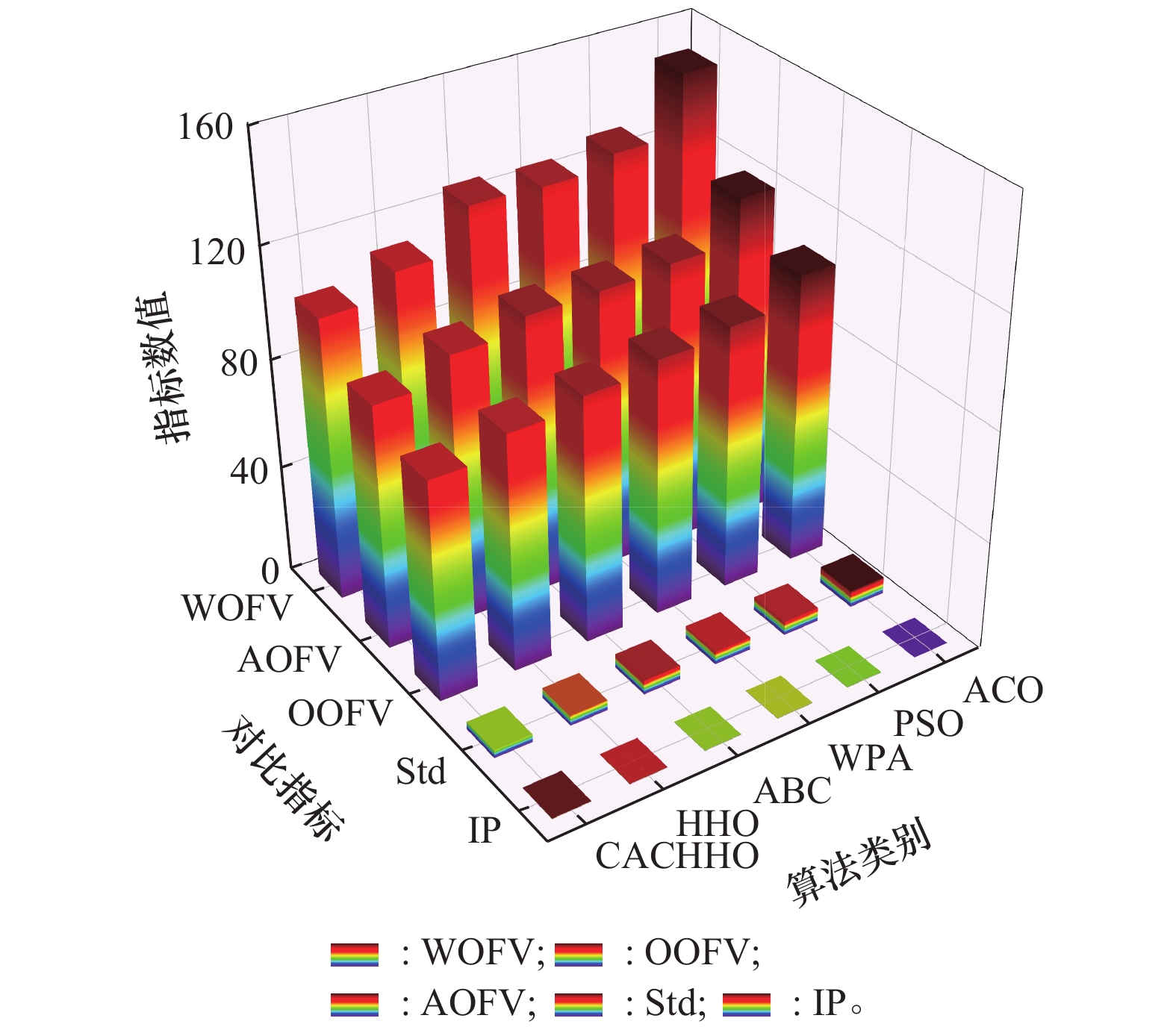
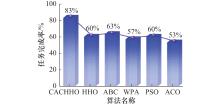
图15
任务完成率对比图"
| 1 | ERDELJ M, NATALIZIO E, CHOWDHURY K R, et al. Help from the sky: leveraging UAVs for disaster management[J]. IEEE Pervasive Computing, 2017, 16(1): 24−32. |
| 2 |
BESADA-PORTAS E, DE LA TORRE L, DE LA CRUZ J M, et al. Evolutionary trajectory planner for multiple UAVs in realistic scenarios[J]. IEEE Trans. on Robotics, 2010, 26 (4): 619- 634.
doi: 10.1109/TRO.2010.2048610 |
| 3 |
SHAKHATREH H, SAWALMEH A H, AL-FUQAHA A, et al. Unmanned aerial vehicles (UAVs): a survey on civil applications and key research challenges[J]. IEEE Access, 2019, 7, 48572- 48634.
doi: 10.1109/ACCESS.2019.2909530 |
| 4 | SHEN H, LIN D F, SONG T. A real-time siamese tracker deployed on UAVs[J]. Journal of Real-Time Image Processing, 2022, 19(2): 463−473. |
| 5 | BASBOUS B. 2D UAV path planning with radar threatening areas using simulated annealing algorithm for event detection[C]//Proc. of the IEEE International Conference on Artificial Intelligence and Data Processing, 2018. |
| 6 |
MANSOURI S S, KANELLAKIS C, GEORGOULAS G, et al. 2D visual area coverage and path planning coupled with camera footprints[J]. Control Engineering, 2018, 75, 1- 16.
doi: 10.1016/j.conengprac.2018.03.011 |
| 7 |
YOO S J, PARK J H, KIM S H, et al. Flying path optimization in UAV-assisted IoT sensor networks[J]. ICT Express, 2016, 2 (3): 140- 144.
doi: 10.1016/j.icte.2016.08.005 |
| 8 | LV Z, YANG L Y, HE Y Q, et al. 3D environment modeling with height dimension reduction and path planning for UAV[C]//Proc. of the 9th International Conference on Modelling, Identification and Control, 2017. |
| 9 | 聂俊岚, 张庆杰, 王艳芬. 基于加权Voronoi图的无人飞行器航迹规划[J]. 飞行力学, 2015, 33 (4): 339- 343. |
| NIE J L, ZHANG Q J, WANG Y F. UAV path planning based on weighted-Voronoi diagram[J]. Flight Dynamics, 2015, 33 (4): 339- 343. | |
| 10 |
LI J, XIONG Y H, SHE J H. UAV path planning for target coverage task in dynamic environment[J]. IEEE Internet of Things Journal, 2023, 10 (20): 17734- 17745.
doi: 10.1109/JIOT.2023.3277850 |
| 11 | 李超凡. 基于人工蜂群的多无人机协同搜索技术研究[D]. 大连: 大连海事大学, 2022. |
| LI C F. The research of cooperative search technology for multi-UAVs based on artificial bee colony[D]. Dalian: Dalian Maritime University, 2022. | |
| 12 | KUWATA Y, HOW J P. Cooperative distributed robust trajectory optimization using receding horizon MILP[J]. IEEE Trans. on Control Systems Technology, 2011, 19(2): 423−431. |
| 13 |
EARL M G, D’ANDREA R. Iterative MILP methods for vehicle-control problems[J]. IEEE Trans. on Robotics, 2005, 21 (6): 1158- 1167.
doi: 10.1109/TRO.2005.853499 |
| 14 | JORRIS T R, COBB R G. Three-dimensional trajectory optimization satisfying waypoint and no-fly zone constraints[J]. Journal of Guidance Control & Dynamics, 2008, 31(2): 543−553. |
| 15 |
OROZCO-ROSAS U, MONTIEL O, SE-PÚLVEDA R. Mobile robot path planning using membrane evolutionary artificial potential field[J]. Applied Soft Computing, 2019, 77, 236- 251.
doi: 10.1016/j.asoc.2019.01.036 |
| 16 |
CHEN Y B, LUO G C, MEI Y S, et al. UAV path planning using artificial potential field method updated by optimal control theory[J]. International Journal of Systems Science, 2016, 47 (6): 1407- 1420.
doi: 10.1080/00207721.2014.929191 |
| 17 | CHEN Y B, YU J Q, SU X L, et al. Path planning for multi-UAV formation[J]. Journal of Intelligent & Robotic Systems, 2015, 77, 229- 246. |
| 18 | XU L, CAO X B, DU W B, et al. Cooperative path planning optimization for multiple UAVs with communication constraints [J]. Knowledge-based Systems, 2023, 260: 110164. |
| 19 | 院金彪, 刘海艳, 马博迪, 等. 不确定环境下基于POMDP和参数化MPC的无人机在线航迹规划[J]. 北京航空航天大学学报, 已录用. |
| YUAN J B, LIU H Y, MA B D, et al, UAV path planning based on partially observable Markov and parameterized MPC in uncertain environments[J]. Journal of Beijing University of Aeronautics and Astronautics, accepted. | |
| 20 | 周鹤翔, 徐扬, 罗德林. 针对动态目标的多无人机协同组合差分进化搜索方法[J]. 控制与决策, 2023, 38 (11): 3128- 3136. |
| ZHOU H X, XU Y, LUO D L. A composite differential evolution algorithm for multi-UAV cooperative dynamic target search[J]. Control and Decision, 2023, 38 (11): 3128- 3136. | |
| 21 |
郑伟铭, 周贞文, 徐扬, 等. 针对运动目标的多无人机协同鸽群优化搜索方法[J]. 控制理论与应用, 2023, 40 (4): 624- 632.
doi: 10.7641/CTA.2022.10466 |
|
ZHENG W M, ZHOU Z W, XU Y, et al. Multi-UAV cooperative pigeon-inspired optimization search method for moving targets[J]. Control Theory & Applications, 2023, 40 (4): 624- 632.
doi: 10.7641/CTA.2022.10466 |
|
| 22 | 柳汀, 周国鑫, 徐扬, 等. 融合信息图的优化哈里斯鹰多无人机动态目标搜索[J]. 航空学报, 2024, 45 (S1): 346- 357. |
| LIU T, ZHOU G X, XU Y, et al. Optimised Harris hawks multi-UAV dynamic target search with fused infographics[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45 (S1): 346- 357. | |
| 23 |
LIU C T, GUO Y, LI N, et al. AoI-minimal task assignment and trajectory optimization in multi-UAV-assisted IoT networks[J]. IEEE Internet of Things, 2022, 9 (21): 21777- 21791.
doi: 10.1109/JIOT.2022.3182160 |
| 24 |
GAO S, WU J Z, AI J L. Multi-UAV reconnaissance task allocation for heterogeneous targets using grouping ant colony optimization algorithm[J]. Soft Computing, 2021, 25 (10): 7155- 7167.
doi: 10.1007/s00500-021-05675-8 |
| 25 |
HEIDARI A A, MIRJALILI S, FARIS H, et al. Harris hawks optimization: algorithm and applications[J]. Future Generation Computer Systems, 2019, 97, 849- 872.
doi: 10.1016/j.future.2019.02.028 |
| 26 | 鲍浩, 张艳. 基于改进哈里斯鹰优化算法的光谱特征波段选择模型研究[J]. 光谱学与光谱分析, 2024, 44 (1): 148- 157. |
| BAO H, ZHANG Y. Research on spectral feature band selection model based on improved Harris hawk optimization algorithm[J]. Spectroscopy and Spectral Analysis, 2024, 44 (1): 148- 157. | |
| 27 | 陈勇, 张薇薇, 刘焕淋, 等. 基于改进的哈里斯鹰算法的光功率均匀性优化[J]. 光学学报, 2025, 45 (8): 104- 115. |
| CHEN Y, ZHANG W W, LIU H L, et al. Optical power uniformity optimization based on the improved Harris hawk optimization algorithm[J]. Acta Optica Sinica, 2025, 45 (8): 104- 115. | |
| 28 |
张雷克, 侯笑鹏, 刘小莲, 等. 基于改进哈里斯鹰算法的梯级泵站优化调度[J]. 浙江大学学报(工学版), 2023, 57 (12): 2501- 2512.
doi: 10.3785/j.issn.1008-973X.2023.12.017 |
|
ZHANG L K, HOU X P, LIU X L, et al. Optimal scheduling of cascade pumping stations based on improved Harris hawks optimization algorithm[J]. Journal of Zhejiang University (Engineering Science), 2023, 57 (12): 2501- 2512.
doi: 10.3785/j.issn.1008-973X.2023.12.017 |
|
| 29 | 刘小龙, 梁彤缨. 基于方形邻域和随机数组的哈里斯鹰优化算法[J]. 控制与决策, 2022, 37 (10): 2467- 2476. |
| LIU X L, LIANG T Y. Harris hawk optimization algorithm based on square neighborhood and random array[J]. Control and Decision, 2022, 37 (10): 2467- 2476. | |
| 30 |
YAO X, LIU Y, LIN G M. Evolutionary programming made faster[J]. IEEE Trans. on Evolutionary Computation, 1999, 3 (2): 82- 102.
doi: 10.1109/4235.771163 |
| 31 | SUN J, FENG B, XU W B. Particle swarm optimization with particles having quantum behavior[C]//Proc. of the Congress on Evolutionary Computation, 2004: 325−331. |
| 32 | LI W, MENG X, HUANG Y, et al. Multi population cooperative particle swarm optimization with a mixed mutation strategy [J]. Information Sciences, 2020, 529: 179−196. |
| [1] | 魏建林, 林彦超, 唐慧龙, 张旺, 王伟. 基于改进MCTS的多无人机多任务联合决策[J]. 系统工程与电子技术, 2026, 48(2): 556-568. |
| [2] | 洪芳宇, 叶青, 张利宁, 伍国华. 面向区域搜索的车载多无人机协同任务规划方法[J]. 系统工程与电子技术, 2026, 48(1): 144-156. |
| [3] | 李正杰, 刘光远, 张浩为, 刘斌, 齐铖. 面向射频隐身的多无人机协同区域覆盖航迹优化方法[J]. 系统工程与电子技术, 2026, 48(1): 301-311. |
| [4] | 李文魁, 张雅雯, 徐务农, 杨裕浩, 金培森, 单晨阳. 海洋无人航行器异构编队控制技术:现状、挑战与展望[J]. 系统工程与电子技术, 2026, 48(1): 312-330. |
| [5] | 羊钊, 胡锦标, 王艳, 齐洪彪. 考虑异巢起降的无人机山地巡检覆盖路径规划[J]. 系统工程与电子技术, 2025, 47(8): 2622-2631. |
| [6] | 符小卫, 王辛夷, 乔哲. 基于APIQ算法的多无人机攻防对抗策略[J]. 系统工程与电子技术, 2025, 47(7): 2205-2215. |
| [7] | 符小卫, 王辛夷, 乔哲. 基于ASDDPG算法的多无人机对抗策略[J]. 系统工程与电子技术, 2025, 47(6): 1867-1879. |
| [8] | 隆雨佟, 陈爱国, 史红权, 曾黎. 基于改进差分进化算法的跨平台武器目标分配方法[J]. 系统工程与电子技术, 2024, 46(3): 953-962. |
| [9] | 张嘉辉, 蒙志君, 何家政, 王子琛, 林尤深. 基于改进能量谷优化的多无人机空战目标分配[J]. 系统工程与电子技术, 2024, 46(11): 3754-3763. |
| [10] | 王建峰, 贾高伟, 郭正, 侯中喜. 多无人机协同任务规划方法研究综述[J]. 系统工程与电子技术, 2024, 46(10): 3437-3450. |
| [11] | 刘瑶, 夏阳升, 石建迈, 陈超, 黄金才. 车载多无人机协同多区域覆盖路径规划方法[J]. 系统工程与电子技术, 2023, 45(5): 1380-1390. |
| [12] | 杨小草, 都延丽, 步雨浓, 刘燕斌, 高程. 基于层次分解的在线三维RRT*协同航路规划[J]. 系统工程与电子技术, 2023, 45(5): 1409-1419. |
| [13] | 王宁, 李哲, 梁晓龙, 王玉冰, 侯岳奇. 通信距离受限条件下的无人机集群协同区域搜索[J]. 系统工程与电子技术, 2022, 44(5): 1615-1625. |
| [14] | 高永琪, 马威强, 张林森, 王鹏, 赵苗. 分布式多AUV协同搜索方法[J]. 系统工程与电子技术, 2022, 44(5): 1670-1676. |
| [15] | 李洪瑶, 李小强, 韩心中, 谢学立, 席建祥. 基于决策融合的多无人机协同目标检测识别算法[J]. 系统工程与电子技术, 2022, 44(3): 746-754. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||