| 1 |
HINCHEY M G, STERRITT R, ROUFF C. Swarms and swarm intelligence[J]. Computer, 2007, 40 (4): 111- 113.
|
| 2 |
王金龙. 基于MEMS与GPS的微小型航姿系统设计与实现[D]. 哈尔滨: 哈尔滨工程大学, 2018.
|
|
WANG J L. Design and realization of micro attitude heading reference system based on combination of MEMS and GPS[D]. Harbin: Harbin Engineering University, 2018.
|
| 3 |
SIVAKUMAR A. UAV swarm coordination and control for establishing wireless connectivity[D]. Singapore: National University of Singapore, 2011.
|
| 4 |
XIONG F, LI A J, WANG H, et all. An SDN-MQTT based communication system for battlefield UAV swarms[J]. IEEE Communications Magazine, 2019, 57 (8): 41- 47.
doi: 10.1109/MCOM.2019.1900291
|
| 5 |
LIN Q Y, WANG X L, WANG Y T. Cooperative formation and obstacle avoidance algorithm for multi-UAV system in 3D environment[C]//Proc. of the Chinese Control Conference, 2018: 6943−6948.
|
| 6 |
MALANDRINO F, ROTTONDI C, CHIASSERINI C F, et al. Multiservice UAVs for emergency tasks in post-disaster scenarios[C]//Proc. of the ACM MobiHoc workshop, 2019: 18−23.
|
| 7 |
RYAN G B, BENJIAMIN E W, ADAM R B. Investigating practical impacts of using single-antenna and dual-antenna GNSS/INS sensors in UAS-LiDAR applications[J]. Sensors, 2021, 21 (16): 5382.
doi: 10.3390/s21165382
|
| 8 |
LIU X H, LIU X X, YANG Y, et al. Variational Bayesian-based robust cubature Kalman filter with application on SINS/GPS integrated navigation system[J]. IEEE Sensors Journal, 2022, 22 (1): 489- 500.
doi: 10.1109/JSEN.2021.3127191
|
| 9 |
FU H P, CHENG Y M. Switching Gaussian-heavy-tailed distribution based robust Gaussian approximate filter for INS/GNSS integration[J]. Journal of the Franklin Institute, 2022, 359 (16): 870- 894.
|
| 10 |
ZHOU Y K, RAO B, WANG W. UAV Swarm intelligence: recent advances and future trends[J]. IEEE Access, 2020, 8: 183856−183878.
|
| 11 |
HELM S V D, COPPOLA M, MCGUIRE K N, et al. On-board range-based relative localization for micro air vehicles in indoor leader–follower flight[J]. Autonomous Robots, 2020, 44 (3): 415- 441.
|
| 12 |
LI S S, COPPOLA M, DE WAGTER C, et al. An autonomous swarm of micro flying robots with range-based relative localization [EB/OL]. [2025-4-11]. https://arxiv.org/pdf/2003.05853v2.
|
| 13 |
熊骏, 熊智, 于永军, 等. 超宽带测距辅助的无人机近距离相对导航方法[J]. 中国惯性技术学报, 2018, 26 (3): 72- 77.
|
|
XIONG J, XIONG Z, YU Y J, et al. Close relative navigation algorithm for unmanned aerial vehicle aided by UWB relative measurement[J]. Journal of Chinese Inertial Technology, 2018, 26 (3): 72- 77.
|
| 14 |
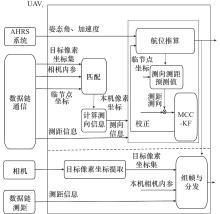
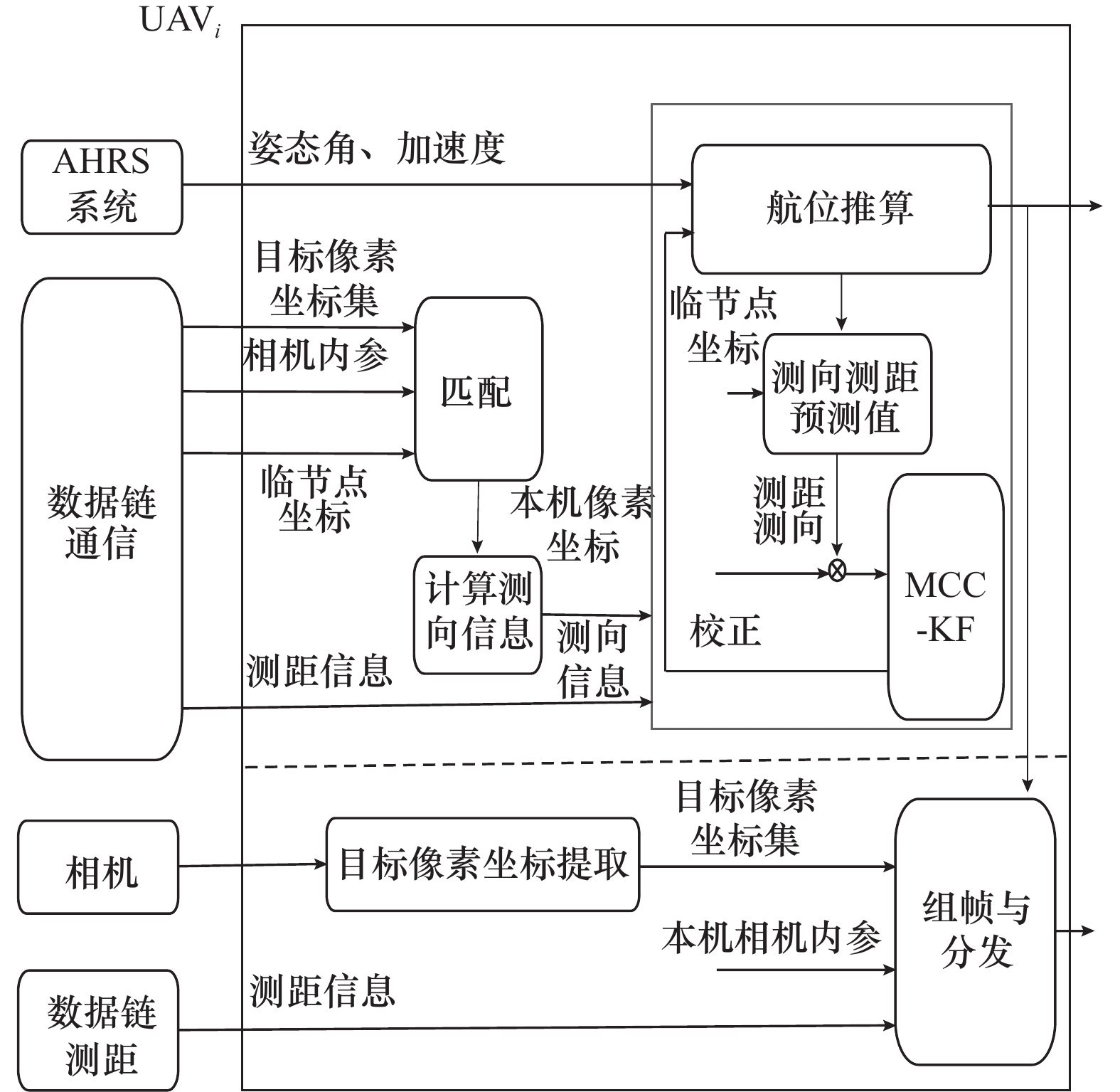
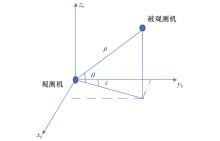
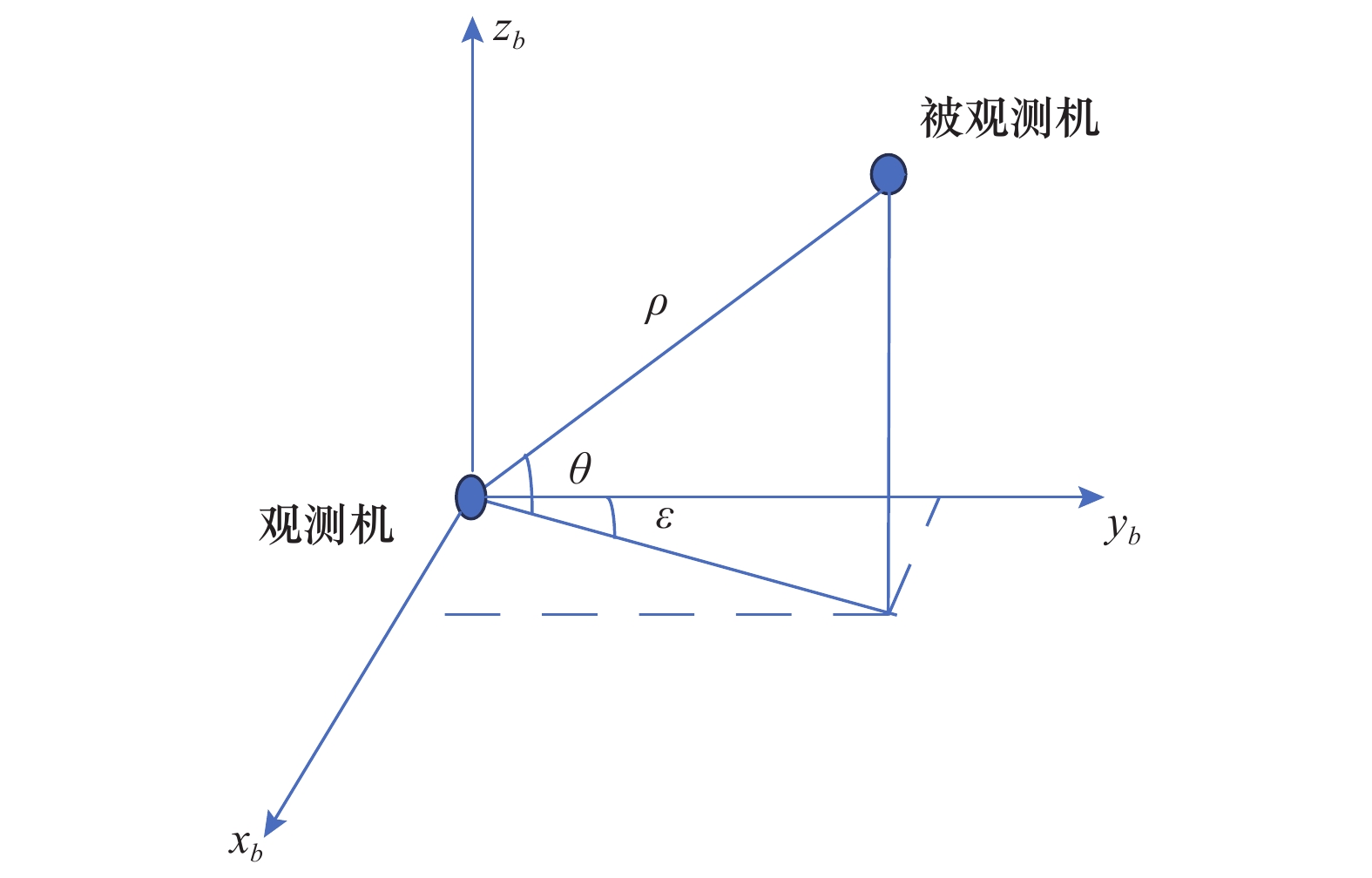
史晨发, 熊智, 蒋旭, 等. 基于AHRS的无人机集群协同导航方法[EB/OL]. [2025-4-11]. https://doi. org/10.13700/j. bh. 1001-5965.2024. 0343.
|
|
SHI C F, XIONG Z, JIANG X, et al. Cooperative navigation for UAV swarm based on AHRS [EB/OL]. [2025-4-11]. https://doi.org/10.13700/j.bh.1001-5965.2024.0343.
|
| 15 |
HARDY J, STRADER J, GROSS J N, et al. Unmanned aerial vehicle relative navigation in GPS denied environments [C]//Proc. of the IEEE/ION Position, Location and Navigation Symposium, 2016: 344−352.
|
| 16 |
张静, 金志华. 空中平台航姿参考系统的设计[J]. 中国惯性技术学报, 2004, 12 (2): 48- 53.
|
|
ZHANG J, JIN Z H. Design of attitude heading reference system for aerial platform[J]. Journal of Chinese Inertial Technology, 2004, 12 (2): 48- 53.
|
| 17 |
刘建业. 导航系统理论与应用[M]. 西安: 西北工业大学出版社, 2010.
|
|
LIU J Y. Theory and application of navigation systems[M]. Xi’an: Northwestern Polytechnical University Press, 2010.
|
| 18 |
王晓龙, 刘海颖, 王景琪. 基于分层SLAM的空地多智能体协同导航[J]. 系统工程与电子技术, 2020, 42 (1): 166- 171.
|
|
WANG X L, LIU H Y, WANG J Q. Collaborative navigation of air-ground multi-agent based on hierarchical SLAM[J]. Systems Engineering and Electronics, 2020, 42 (1): 166- 171.
|
| 19 |
齐乃新, 张胜修, 曹立佳, 等. 基于辅助匹配的1点RANSAC单目视觉导航算法[J]. 系统工程与电子技术, 2018, 40 (5): 1109- 1117.
|
|
QI N X, ZHANG S X, CAO L J, et al. Monocular visual navigation method with 1-point RANSAC based on aided matching[J]. Systems Engineering and Electronics, 2018, 40 (5): 1109- 1117.
|
| 20 |
周紫君, 郁丰, 吴方, 等. 一种机载惯性/光电组合导航误差修正方法[J]. 中国惯性技术学报, 2024, 32(8): 779−786, 794.
|
|
ZHOU Z J, YU F, WU F, et al. Error correction method for airborne SINS/EODS integrated navigation[J]. Journal of Chinese Inertial Technology, 2024, 32(8): 779−786, 794.
|
| 21 |
CHEN B, LIU X, ZHAO H, et al. Maximum correntropy Kalman filter[J]. Automatica, 2017, 76: 70−77.
|
| 22 |
WANG J Q, LYU D, HE Z, et al. Cauchy kernel-based maximum correntropy Kalman filter[J]. International Journal of Systems Science. 2020, 51(16): 3523−3538.
|
| 23 |
赵建印, 毛廷鎏, 杨根庆, 等. 最大相关熵卡尔曼滤波误差修正方法[J]. 现代防御技术, 2024, 52 (5): 156- 161.
|
|
ZHAO J Y, MAO T L, YANG G Q, et al. Maximum correlation entropy Kalman filter error correction method[J]. Modern Defence Technology, 2024, 52 (5): 156- 161.
|
| 24 |
IZANLOO R, FAKOORIAN S A, YAZDI H S, et al. Kalman filtering based on the maximum correntropy criterion in the presence of non-Gaussian noise[C]//Proc. of the Annual Conference on Information Science and Systems, 2016: 500−505.
|
| 25 |
冯忠华, 王新龙, 王彬. 一种数据链传输延迟建模及其补偿方法[J]. 北京航空航天大学学报, 2012, 38 (8): 1106- 1110.
|
|
FENG Z H, WANG X L, WANG B. Transfer time delay model of data link and its compensation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38 (8): 1106- 1110.
|
| 26 |
刘敏. 数据链测试评估关键技术研究[D]. 西安: 西安电子科技大学, 2009.
|
|
LIU M. Research on key technologies of data link test and evaluation[D]. Xi’an: Xidian University. 2009.
|
| 27 |
周伟超. 基于最大相关熵卡尔曼滤波的组合导航方法[J]. 信息技术, 2022, 46 (9): 78- 83.
|
|
ZHOU W C. Integrated navigation method based on maximum joint entropy Kalman filter[J]. Information Technology, 2022, 46 (9): 78- 83.
|
| 28 |
张可鑫, 席志红. 基于最大相关熵卡尔曼滤波的UWB室内定位算法[J]. 应用科技, 2024, 51 (3): 98- 104.
|
|
ZHANG K X, XI Z H. Ultra wide band indoor location algorithm based on maximum correlation entropy Kalman filter[J]. Applied Science and Technology, 2024, 51 (3): 98- 104.
|
| 29 |
李琼, 考月英, 张莹, 等. 面向无人机航拍图像的目标检测研究综述[J]. 图学学报, 2024, 45 (6): 1145- 1164.
|
|
LI Q, KAO Y Y, ZHANG Y, et al. Review on object detection in UAV aerial images[J]. Journal of Graphics, 2024, 45 (6): 1145- 1164.
|
| 30 |
YE T, ZHAO Z Y, ZHANG J, et al. Low-altitude small-sized object detection using lightweight feature-enhanced convolutional neural network[J]. Journal of Systems Engineering and Electronics, 2021, 32 (4): 841- 853.
doi: 10.23919/JSEE.2021.000073
|
| 31 |
YAN J H, WANG Z G, WANG S F. Real-time tracking of deformable objects based on MOK algorithm[J]. Journal of Systems Engineering and Electronics, 2016, 27 (2): 477- 483.
doi: 10.1109/JSEE.2016.00050
|
| 32 |
WEI Z Q, JI X P, WANG P. Real-time moving object detection for video monitoring systems[J]. Journal of Systems Engineering and Electronics, 2006, 17 (4): 731- 736.
doi: 10.1016/S1004-4132(07)60007-3
|
| 33 |
HUANG X Z, TIAN Y P. Asynchronous distributed localization in networks with communication delays and packet losses[J]. Automatica, 2018, 96, 134- 140.
doi: 10.1016/j.automatica.2018.06.048
|