
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (7): 2314-2328.doi: 10.12305/j.issn.1001-506X.2025.07.24
焉晓贞1,*, 周新悦1, 罗清华1,2
收稿日期:2024-06-25
出版日期:2025-07-16
发布日期:2025-07-22
通讯作者:
焉晓贞
作者简介:焉晓贞 (1981—), 女, 副教授, 博士, 主要研究方向为分布式无线定位、水下定位导航、智能无人系统基金资助:Xiaozhen YAN1,*, Xinyue ZHOU1, Qinghua LUO1,2
Received:2024-06-25
Online:2025-07-16
Published:2025-07-22
Contact:
Xiaozhen YAN
摘要:
为了解决无人船动态路径规划中路径转折点多、路径安全性差以及传统A-star算法在动态环境中应用受限的问题, 提出一种改进的A-star算法。首先,通过修改open-list的存储方式和增加邻域搜索方向, 灵活调整无人船的行进方向, 提升其在动态环境中的适应能力。其次, 通过引入直线引导函数和安全距离代价公式, 有效优化路径规划过程, 避免不必要的路径绕行和碰撞风险。最后, 通过聚焦搜索方法, 减少无人船振荡反复运动。仿真结果表明, 改进的A-star算法能够成功躲避动态障碍物, 并且与其他动态路径规划算法相比, 改进A-star在路径长度方面减少了4.88%和0.09%, 平滑度方面减少了37.32%和23.17%。改进后的算法能生成更平滑、安全的路径, 适用于无人船的动态路径规划。
中图分类号:
焉晓贞, 周新悦, 罗清华. 改进A-star算法的无人船动态路径规划[J]. 系统工程与电子技术, 2025, 47(7): 2314-2328.
Xiaozhen YAN, Xinyue ZHOU, Qinghua LUO. Improved A-star algorithm for dynamic path planning of unmanned ships[J]. Systems Engineering and Electronics, 2025, 47(7): 2314-2328.
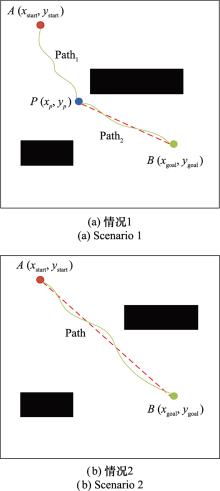
图1
环境情况"
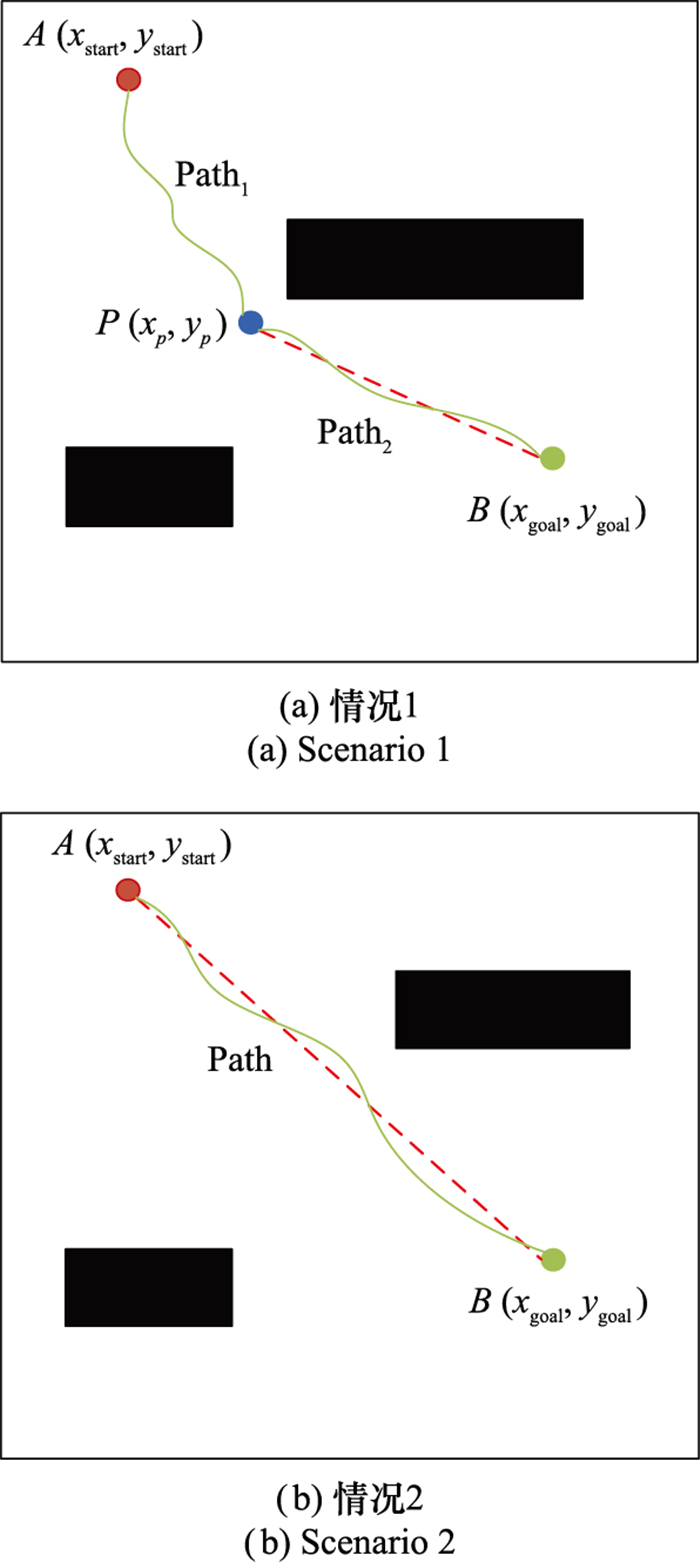

图2
求最佳边界点原理图"
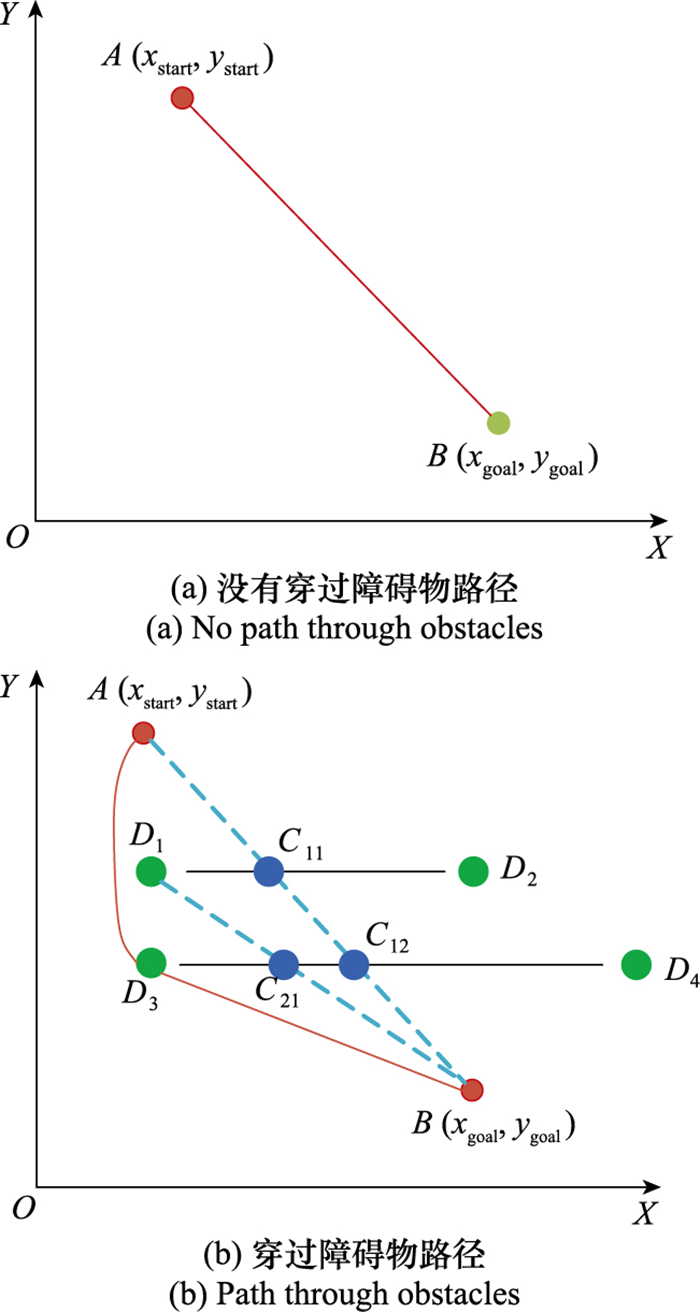

图3
求新边界点原理图"

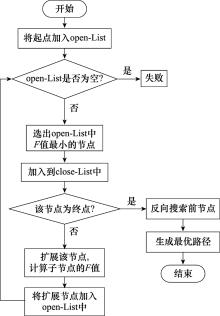
图4
传统A-star算法流程图"
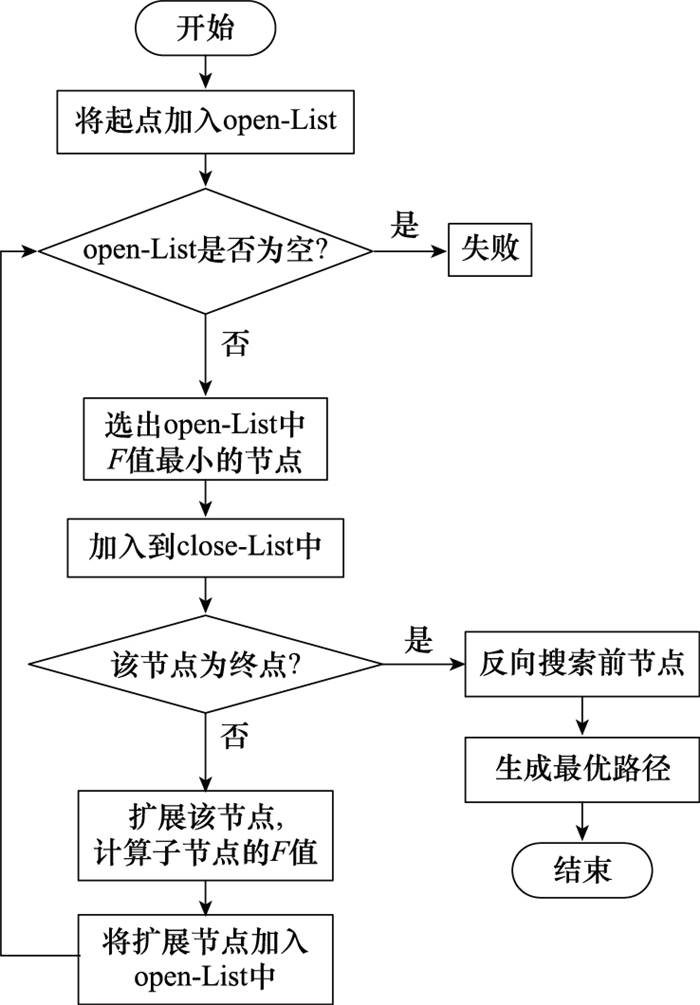

图5
算法框架图"

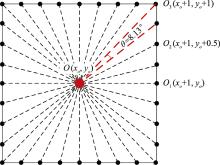
图6
32邻域搜索方向"
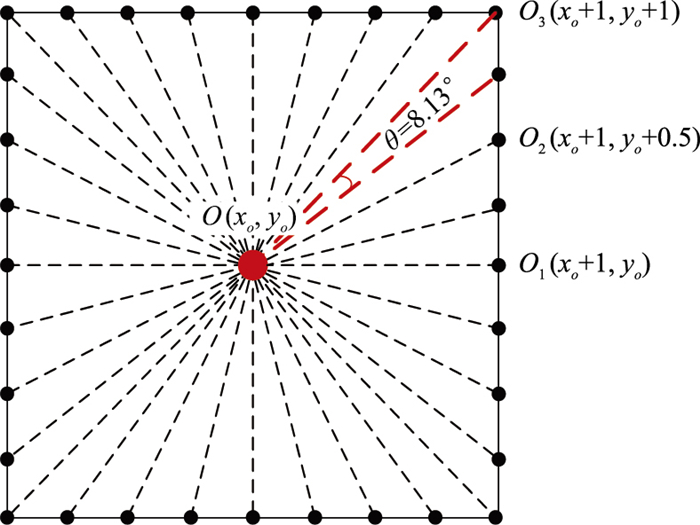
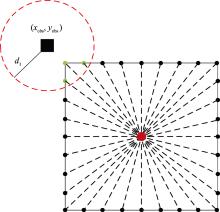
图7
安全距离搜索点原理图"
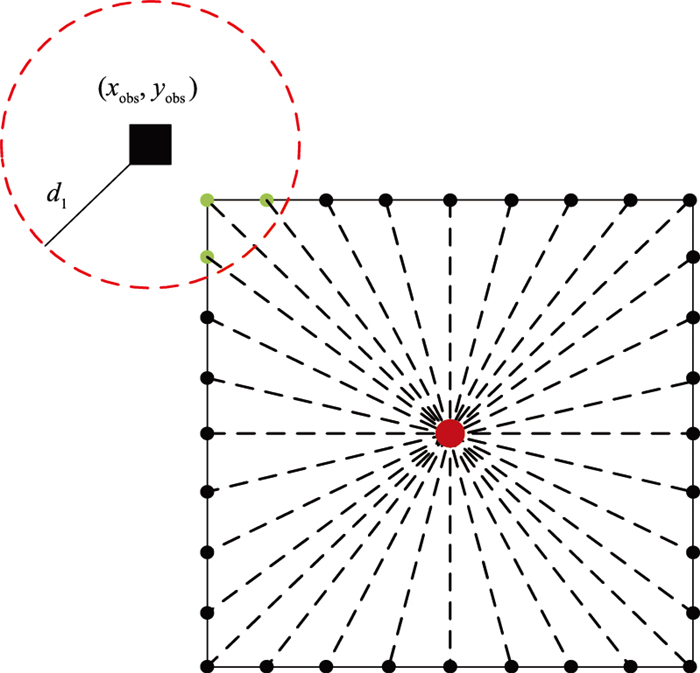
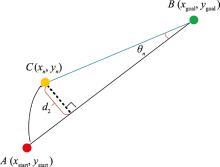
图8
直线引导路径分析"
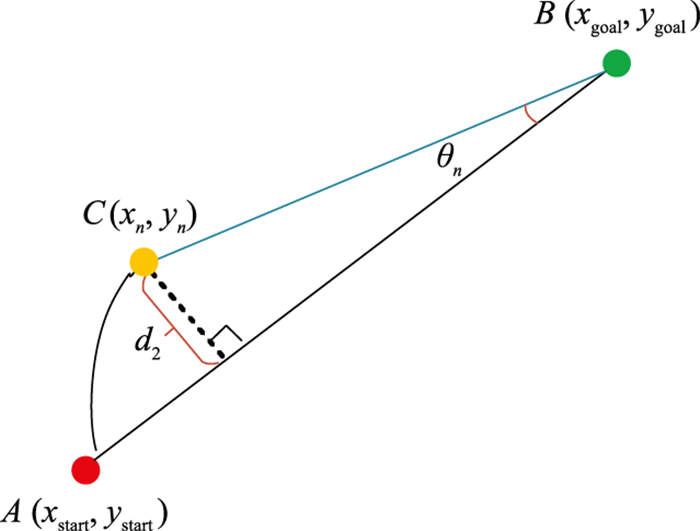
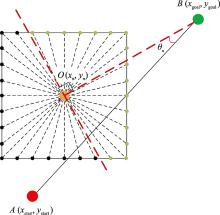
图9
聚焦16邻域搜索方向原理图"
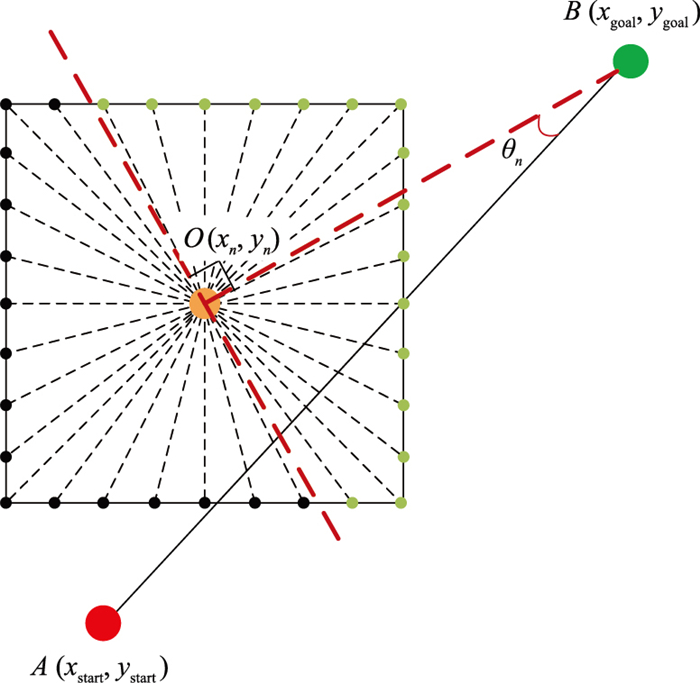
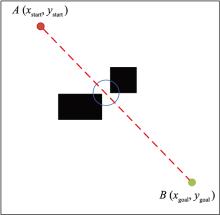
图10
特殊情况"
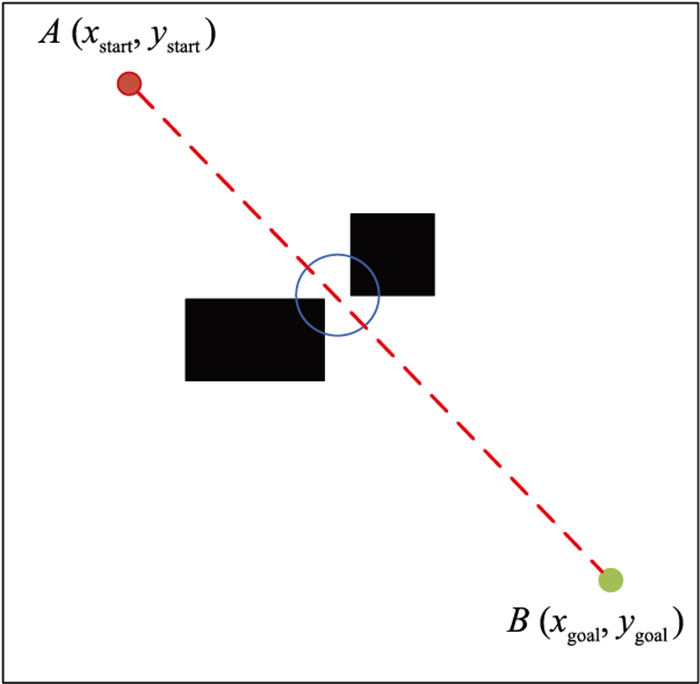
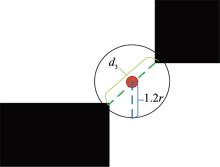
图11
距离判断"
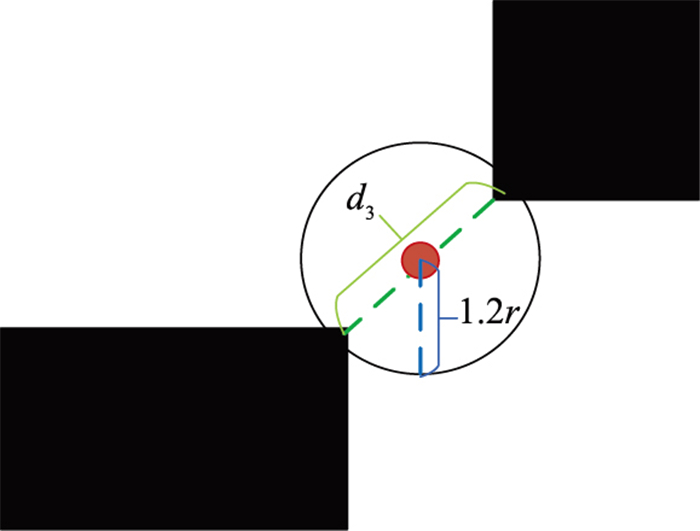

图12
障碍物连贯性处理"
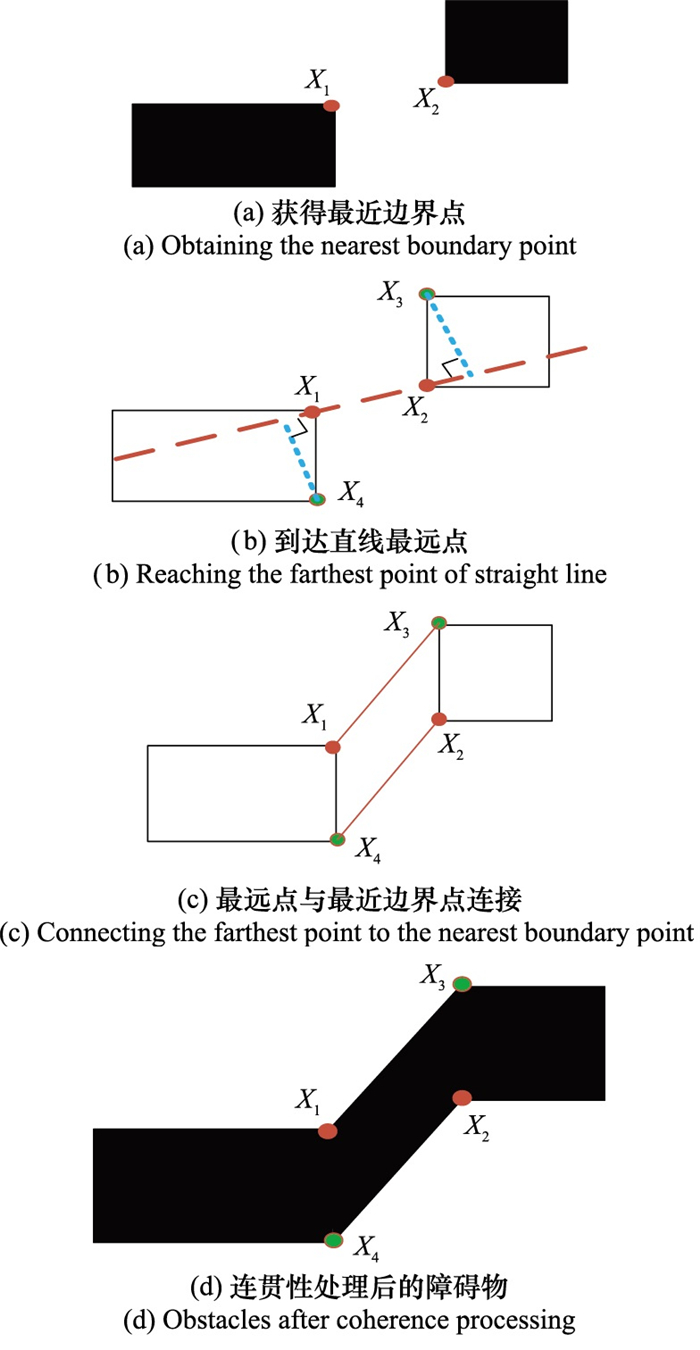
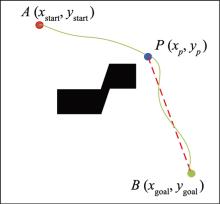
图13
特殊情况处理后路径规划"
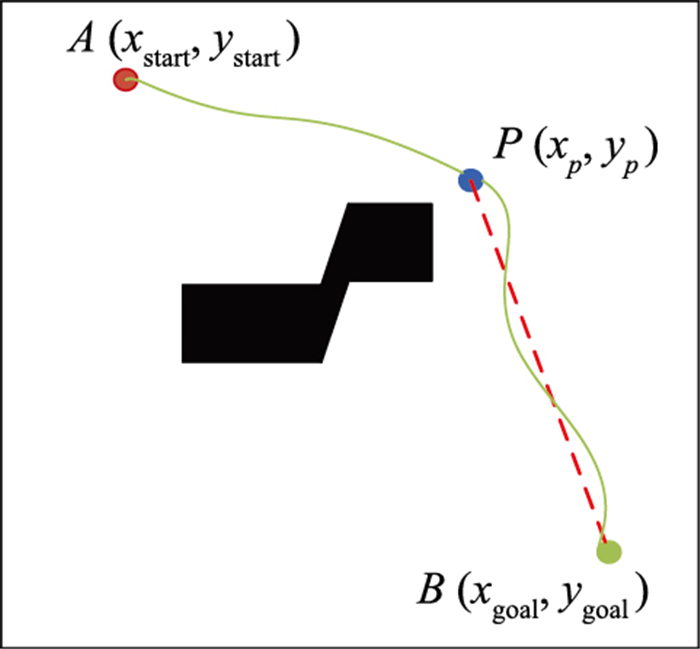
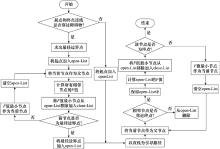
图14
改进A-star算法流程图"
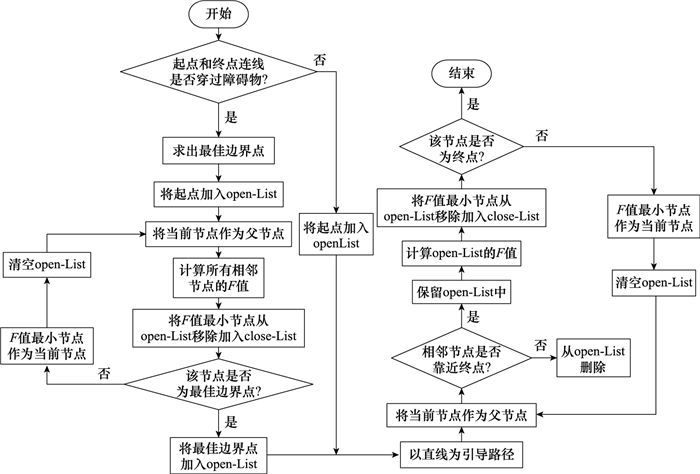
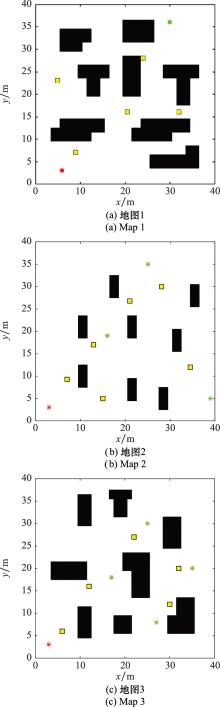
图15
实验仿真地图"
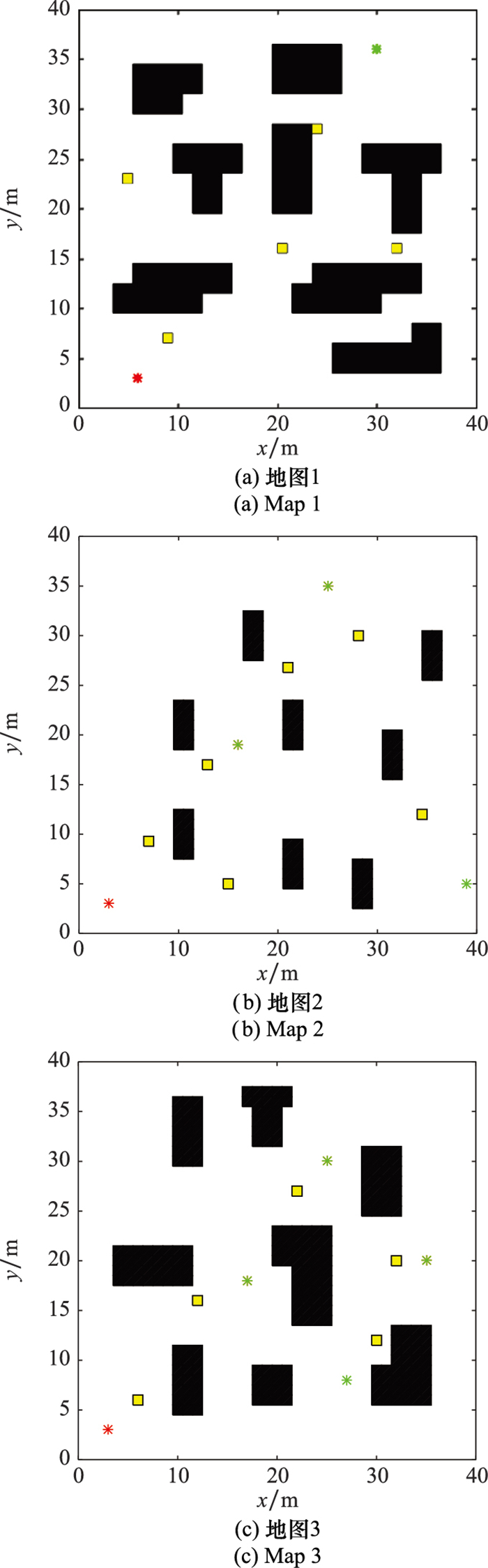
表1
仿真地图起点与目标点分布"
| 位置 | 地图 1 | 地图 2 | 地图 3 |
| 起点 | (6, 3) | (3, 3) | (3, 3) |
| 目标点1 | (30, 36) | (16, 19) | (17, 18) |
| 目标点2 | — | (25, 35) | (25, 30) |
| 目标点3 | — | (39, 5) | (35, 20) |
| 目标点4 | — | — | (27, 8) |
表2
参数设置"
| 参数 | 数值 |
| r | 2 |
| d1 | 2 |

图16
地图 1中DIA-star仿真结果"

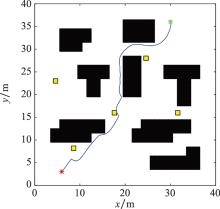
图17
地图 1中IAPF仿真结果"
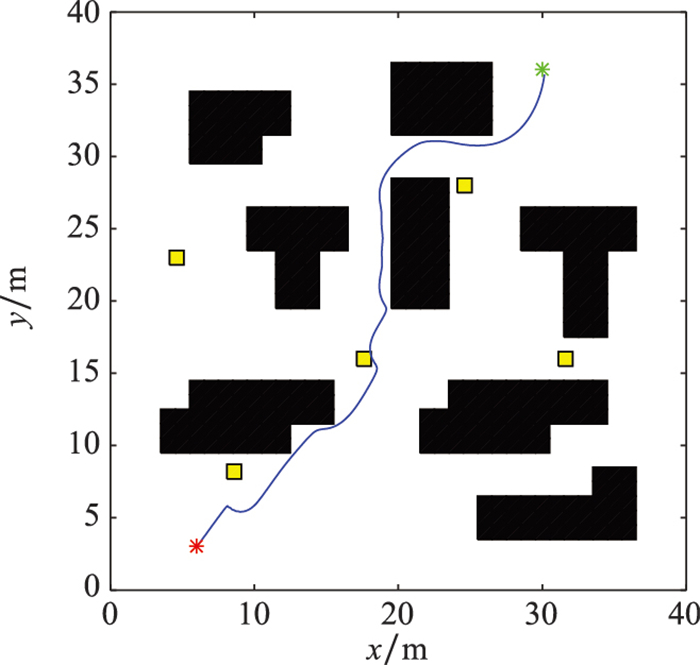
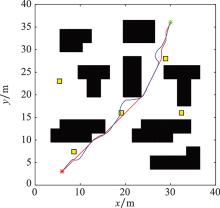
图18
地图 1中IA*-APF仿真结果"
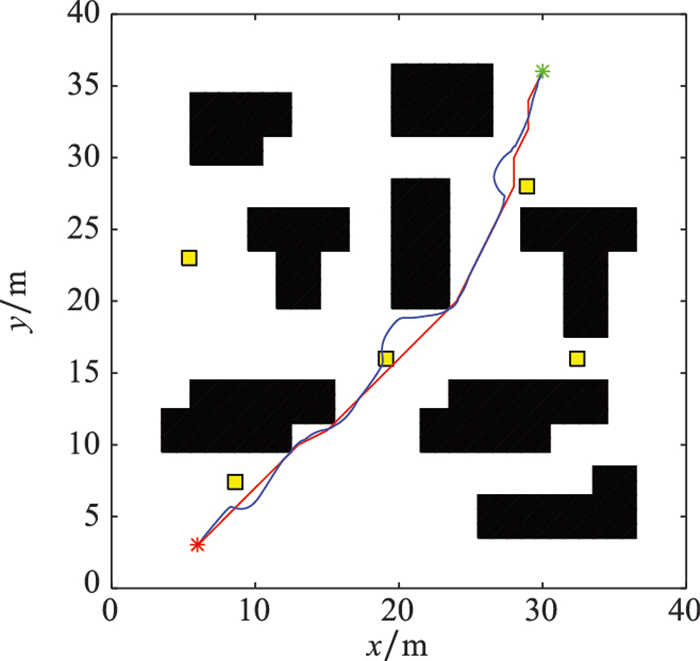
表3
地图 1仿真结果数据"
| 评价指标 | IAPF | IA*-APF | DIA-star |
| 路径长度/m | 47.61 | 45.33 | 45.29 |
| Plength/% | 4.88 | 0.09 | — |
| 平滑度/rad | 20.12 | 16.41 | 12.61 |
| Pangle/% | 37.32 | 23.17 | — |
| 碰撞风险度 | 56.26 | 66.19 | 0 |
| Pcoll/% | 100 | 100 | — |
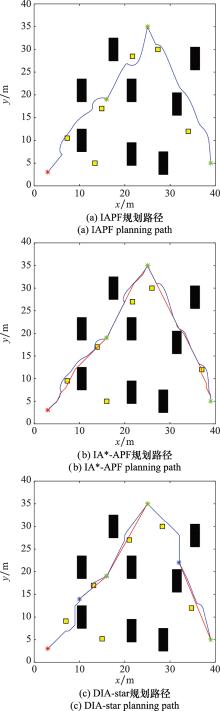
图19
3种算法在地图 2中的仿真结果"
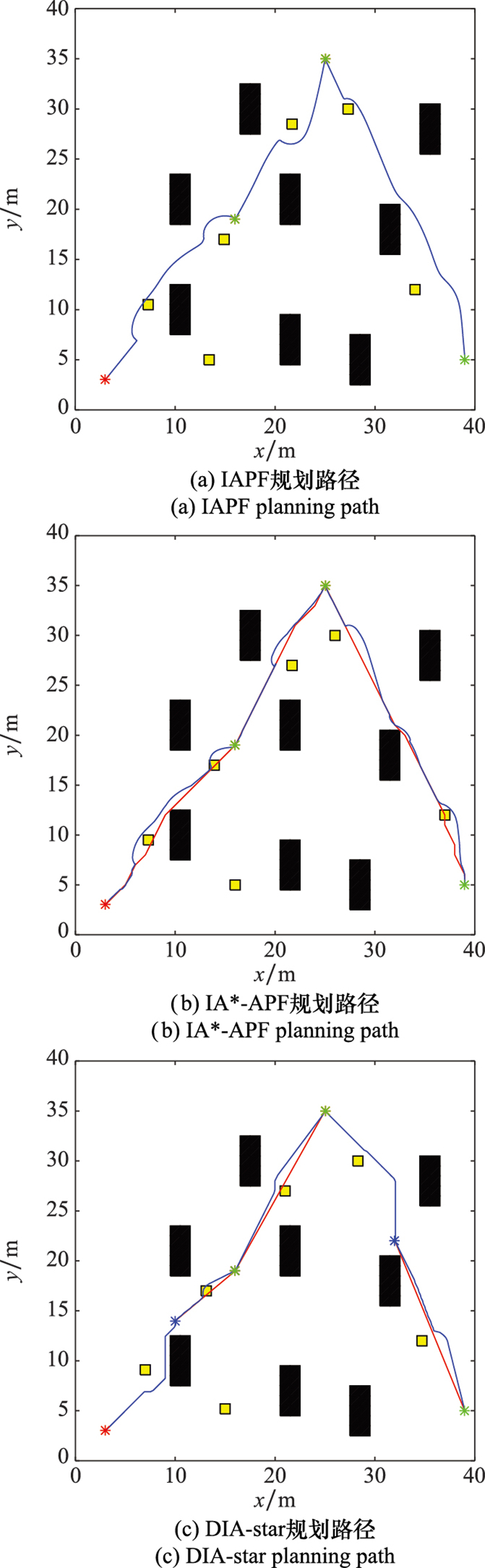
表4
地图 2仿真结果数据"
| 算法 | 评价指标 | 第1段 | 第2段 | 第3段 | 合计 |
| IAPF | 路径长度/m | 22.85 | 20.1 | 35.2 | 78.15 |
| 平滑度/rad | 13.9 | 7.8 | 12.42 | 34.12 | |
| 碰撞风险度 | 0 | 0 | 21.99 | 21.99 | |
| IA*-APF | 路径长度/m | 22.5 | 21.2 | 35.15 | 78.85 |
| 平滑度/rad | 15.8 | 6.79 | 14.67 | 37.26 | |
| 碰撞风险度 | 0 | 0 | 14.99 | 14.99 | |
| DIA-star | 路径长度/m | 22.72 | 19.01 | 34.62 | 76.35 |
| 平滑度/rad | 9.34 | 2.43 | 11.86 | 23.63 | |
| 碰撞风险度 | 0 | 0 | 2.73 | 2.73 |
表5
地图 2中的对比"
| 算法 | Plength | Pangle | Pcoll |
| IAPF | 2.3 | 30.76 | 87.58 |
| IA*-APF | 3.17 | 36.57 | 81.79 |
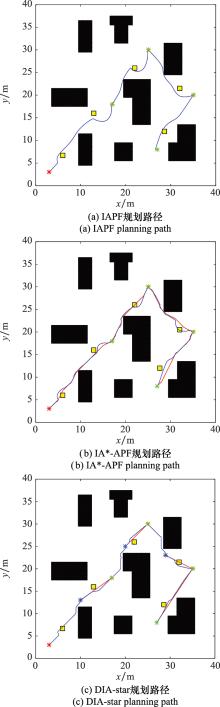
图20
3种算法在地图 3中的仿真结果"
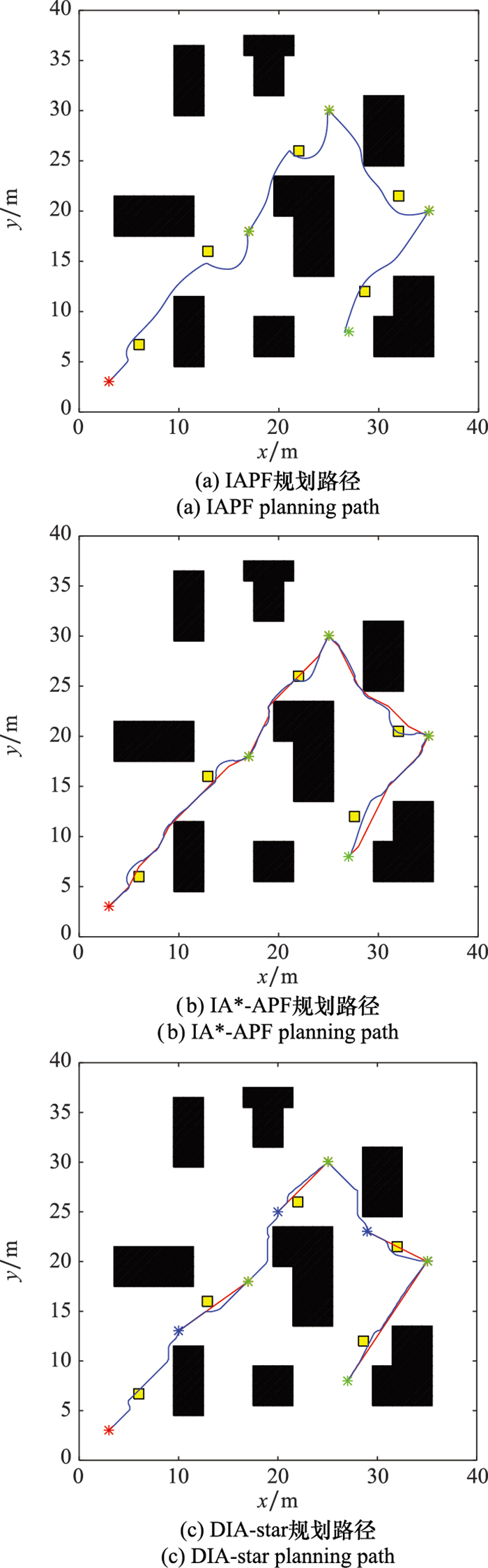
表6
地图 3仿真结果数据"
| 算法 | 评价指标 | 第1段 | 第2段 | 第3段 | 第4段 | 合计 |
| IAPF | 路径长度/m | 24 | 16.5 | 16.1 | 16 | 72.6 |
| 平滑度/rad | 13.15 | 15.61 | 12.21 | 11.3 | 52.27 | |
| 碰撞风险度 | 29.36 | 0 | 79.11 | 58.80 | 167.27 | |
| IA*-APF | 路径长度/m | 23.05 | 16.5 | 16.05 | 15.25 | 70.85 |
| 平滑度/rad | 10.81 | 9.23 | 13.27 | 13.49 | 46.8 | |
| 碰撞风险度 | 18.51 | 26.20 | 0 | 19.41 | 64.12 | |
| DIA-star | 路径长度/m | 22.14 | 16.08 | 15.84 | 14.60 | 68.66 |
| 平滑度/rad | 8.67 | 9.17 | 10.6 | 4.78 | 33.22 | |
| 碰撞风险度 | 0 | 0 | 0 | 0 | 0 |
表7
地图 3中的对比"
| 算法 | Plength | Pangle | Pcoll |
| IAPF | 5.42 | 36.44 | 100 |
| IA*-APF | 3.09 | 29.03 | 100 |
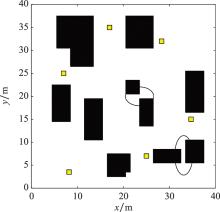
图21
特殊情况地图"
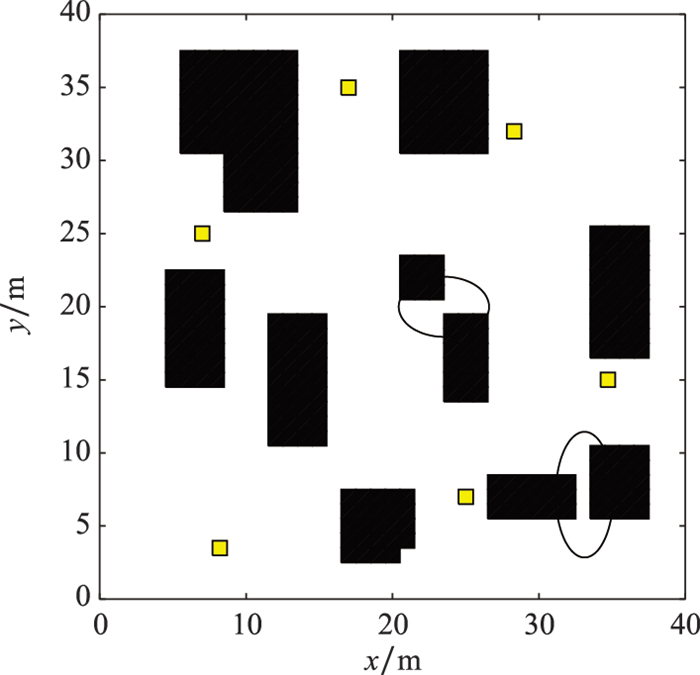
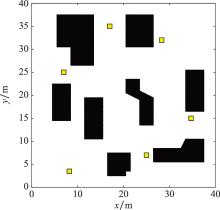
图22
障碍物连贯性处理后地图"
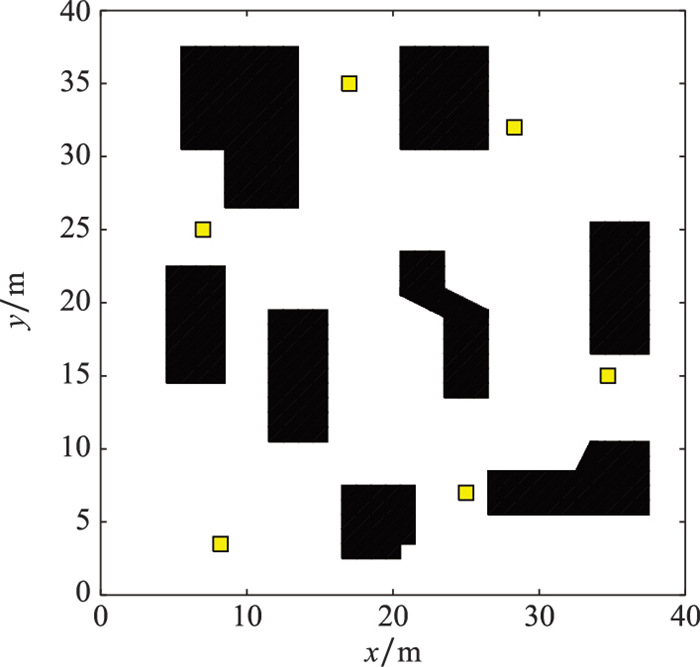
表8
特殊情况下DIA-star算法获得仿真结果数据"
| 评价指标 | 仿真结果 |
| 路径长度/m | 51.52 |
| 平滑度/rad | 9.31 |
| 碰撞风险度 | 18.39 |
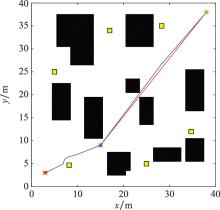
图23
特殊情况地图DIA-star算法获得路径"
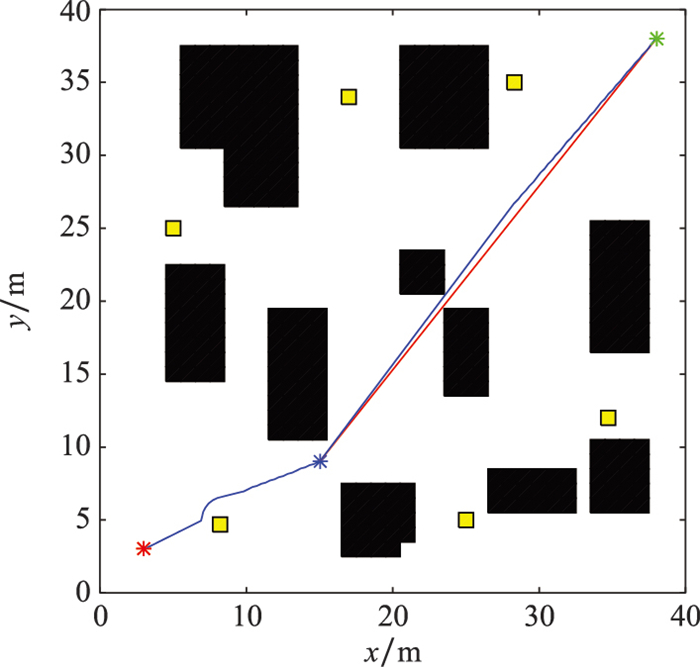
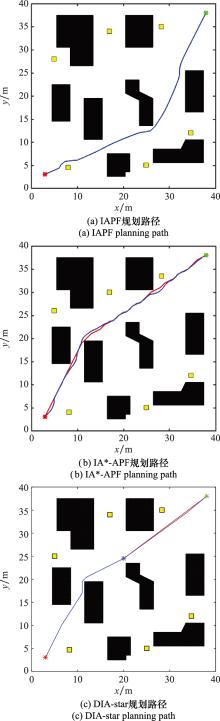
图24
连贯性处理后3种算法下仿真结果"
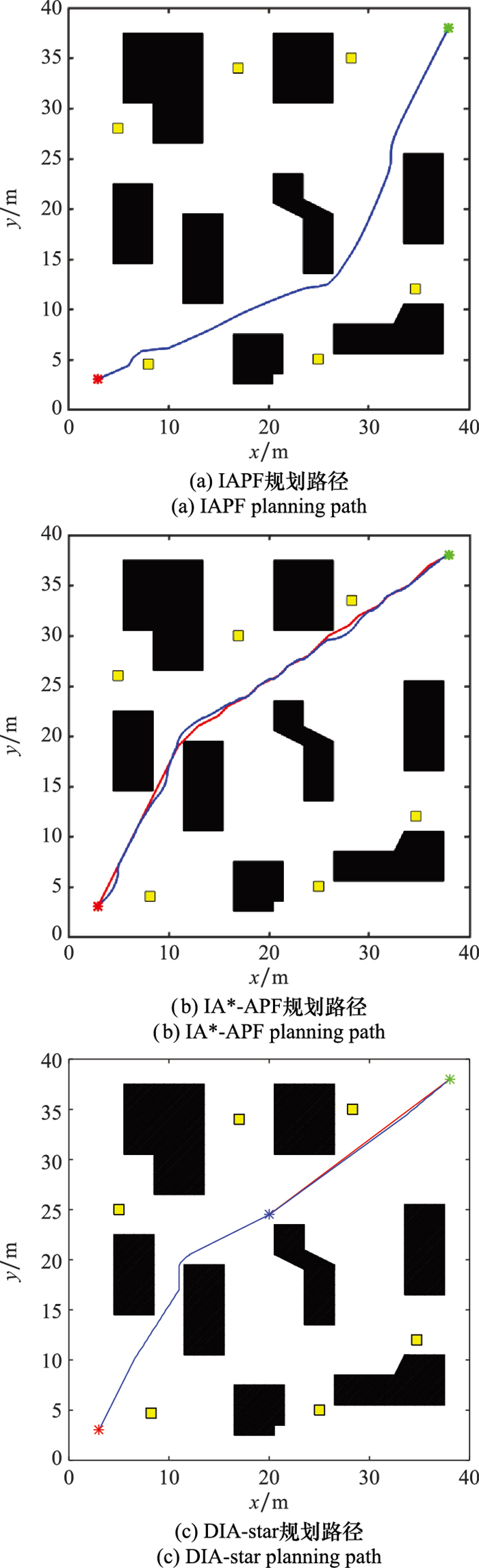
表9
连贯性处理后仿真结果数据"
| 评价指标 | IAPF | IA*-APF | DIA-star |
| 路径长度/m | 54.26 | 53.75 | 52.35 |
| Plength/% | 3.52 | 2.6 | — |
| 平滑度/rad | 10.93 | 29.04 | 10.75 |
| Pangle/% | 1.67 | 62.98 | - |
| 碰撞风险度 | 0 | 1.1 | 0 |
| Pcoll/% | 0 | 100 | — |
| 1 |
赵贵祥, 周健, 李云淼, 等. 改进双向快速搜索随机树的无人艇路径规划[J]. 系统工程与电子技术, 2024, 46 (4): 1364- 1371.
doi: 10.12305/j.issn.1001-506X.2024.04.25 |
|
ZHAO G X , ZHOU J , LI Y M , et al. Improved bi-directional rapidly-exploring random tree path planning for USV[J]. Systems Engineering and Electronics, 2024, 46 (4): 1364- 1371.
doi: 10.12305/j.issn.1001-506X.2024.04.25 |
|
| 2 | YUAN S Y , LI Y , BAO F W , et al. Marine environmental monitoring with unmanned vehicle platforms: present applications and future prospects[J]. Science of The Total Environment, 2023, 858, 159741- 159755. |
| 3 | MA Y , ZHU P X , ZHU G B , et al. Cooperative towing for double unmanned surface vehicles connected with a floating rope via vertical formation and adaptive moment control[J]. Ocean Engineering, 2023, 279, 114486- 114497. |
| 4 | CHO S W , PARK H J , LEE H , et al. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations[J]. Computers & Industrial Engineering, 2021, 161, 107612- 107626. |
| 5 | GAO K Z , GAO M L , ZHOU M C , et al. Artificial intelligence algorithms in unmanned surface vessel task assignment and path planning: a survey[J]. Swarm and Evolutionary Computation, 2024, 86, 101505- 101518. |
| 6 | JIANG C J, ZHU H, XIE Y. Dynamic obstacle avoidance research for mobile robots incorporating improved A-star algorithm and DWA algorithm[C]//Proc. of the IEEE International Conference on Computer Science, Electronic Information Engineering and Intelligent Control Technology, 2023: 896-900. |
| 7 | ZHANG R , GUO H , ANDRIUKAITIS D , et al. Intelligent path planning by an improved RRT algorithm with dual grid map[J]. Alexandria Engineering Journal, 2024, 88, 91- 104. |
| 8 | ZHANG W , WANG N X , WU W H . A hybrid path planning algorithm considering AUV dynamic constraints based on improved A* algorithm and APF algorithm[J]. Ocean Engineering, 2023, 285, 115333- 115342. |
| 9 | ZENG Y X , XU K . Recognition and interfere deceptive behavior based on inverse reinforcement learning and game theory[J]. Journal of Systems Engineering and Electronics, 2023, 34 (2): 270- 288. |
| 10 | ZHAO J L , DEENG C S , YU H H , et al. Path planning of unmanned vehicles based on adaptive particle swarm optimization algorithm[J]. Computer Communications, 2024, 216, 112- 129. |
| 11 | MIYOMBO M E , LIU Y K , MULENGA C M , et al. Optimal path planning in a real-world radioactive environment: a comparative study of A-star and Dijkstra algorithms[J]. Nuclear Engineering and Design, 2024, 420, 113039- 113048. |
| 12 | SIEVER M , VALENTINO A , SURYANINGRUM K M , et al. Dijkstra's algorithm to find the nearest vaccine location[J]. Procedia Computer Science, 2023, 216, 5- 12. |
| 13 | BAO W, LI J, PAN Z H, et al. Improved A-star algorithm for mobile robot path planning based on sixteen-direction search[C]// Proc. of the IEEE China Automation Congress, 2022: 1332-1336. |
| 14 | ZHANG Y , LI L L , LIN H C , et al. Development of path planning approach using improved A-star algorithm in AGV system[J]. Journal of Internet Technology, 2019, 20 (3): 915- 924. |
| 15 | SONG R , LIU Y C , BUCKNALL R . Smoothed A* algorithm for practical unmanned surface vehicle path planning[J]. Applied Ocean Research, 2019, 83, 9- 20. |
| 16 | GUO B , KUANG Z , GUAN J H , et al. An improved a-star al gorithm for complete coverage path planning of unmanned ships[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2022, 36 (3): 2259009. |
| 17 | LIU C G , MAO Q Z , CHU X M , et al. An improved A-star algorithm considering water current, traffic separation and berthing for vessel path planning[J]. Applied Sciences, 2019, 9 (6): 1057. |
| 18 | CHANG T G , TIAN G F . Hybrid A-Star path planning method based on hierarchical clustering and trichotomy[J]. Applied Sciences, 2024, 14 (13): 5582. |
| 19 | LI Y, WANG Z X, ZHANG S Y. Path planning of robots based on an improved A-star algorithm[C]//Proc. of the IEEE Electronic and Automation Control Conference, 2022: 826-831. |
| 20 | LIU H Y , LIU J X . Research on automatic path planning method of warehouse inspection robot[J]. Applied Artificial Intelligence, 2023, 37 (1): 2306- 2321. |
| 21 | 王子静, 陈熙源. 基于改进A*和DWA的无人艇路径规划算法[J]. 传感技术学报, 2021, 34 (2): 249- 254. |
| WANG Z J , CHEN X Y . An unmanned boat path planning algorithm based on improved A* and DWA[J]. Journal of Sensing Technology, 2021, 34 (2): 249- 254. | |
| 22 | XIE S R , WU P , LIU H L , et al. A novel method of unmanned surface vehicle autonomous cruise[J]. Industrial Robot: an International Journal, 2016, 43 (1): 121- 130. |
| 23 |
李文刚, 汪流江, 方德翔, 等. 联合A与动态窗口法的路径规划算法[J]. 系统工程与电子技术, 2021, 43 (12): 3694- 3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
LI W G , WANG L J , FANG D X , et al. Path planning algorithm combining A with DWA[J]. Systems Engineering and Electronics, 2021, 43 (12): 3694- 3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
| 24 | LIU H X , ZHANG Y H . ASL-DWA: an improved A-star algorithm for indoor cleaning robots[J]. IEEE Access, 2022, 10, 99498- 99515. |
| 25 | LIU Y J , WANG C , WU H , et al. Mobile robot path planning based on kinematically constrained A-star algorithm and DWA fusion algorithm[J]. Mathematics, 2023, 11 (21): 4552- 4571. |
| 26 | LIU L S , WANG B , XU H . Research on path-planning algorithm integrating optimization A-star algorithm and artificial potential field method[J]. Electronics, 2022, 11 (22): 3660. |
| 27 | 徐淑萍, 杨定哲, 闫索遥, 等. 室内环境下改进的混合路径规划算法[J]. 西安工业大学学报, 2024, 44 (2): 232- 243. |
| XU S P , YANG D Z , YAN S Y , et al. An improved hybrid path planning algorithm for indoor environments[J]. Journal of Xi'an University of Technology, 2024, 44 (2): 232- 243. | |
| 28 | 余翔, 姜陈, 段思睿, 等. 改进A*算法和人工势场法的路径规划[J]. 系统仿真学报, 2024, 36 (3): 782- 794. |
| YU X , JIANG C , DUAN S R , et al. Path planning for im provement of A* algorithm and artificial potential field method[J]. Journal of System Simulation, 2024, 36 (3): 782- 794. | |
| 29 | 汤玉春, 王睿忠. 基于改进A-star与DWA相融合的移动机器人动态路径规划算法[J]. 智能计算机与应用, 2024, 14 (2): 18- 27. |
| TANG Y C , WANG R Z . Dynamic path planning algorithm for mobile robots based on improved A-star and DWA fusion[J]. Intelligent Computer and Applications, 2024, 14 (2): 18- 27. | |
| 30 | YAN X Z , ZHOU X Y , LUO Q H . A safe heuristic path-planning method based on a search strategy[J]. Sensors, 2023, 24 (1): 101. |
| 31 | ZHANG Z M, JIA R X, CHEN X M, et al. Dynamic obstacle avoidance path planning of unmanned vehicle based on improved APF[C]//Proc. of the IEEE International Symposium on Computer Science and Intelligent Control, 2023: 135-140. |
| [1] | 羊钊, 胡锦标, 王艳, 齐洪彪. 考虑异巢起降的无人机山地巡检覆盖路径规划[J]. 系统工程与电子技术, 2025, 47(8): 2622-2631. |
| [2] | 唐俊超, 胡春鹤. 三维地形风场环境下无人机全覆盖路径规划[J]. 系统工程与电子技术, 2025, 47(7): 2349-2356. |
| [3] | 刘伊婕, 姜斌, 马亚杰, 李文博, 刘成瑞. 无人艇编队避碰路径规划与重规划[J]. 系统工程与电子技术, 2025, 47(6): 1964-1974. |
| [4] | 陈威, 王从庆, 曾强, 李战. 面向飞机表面视觉检查的无人机覆盖路径规划[J]. 系统工程与电子技术, 2025, 47(4): 1206-1213. |
| [5] | 耿泽, 黄炎焱, 张寒. 基于火炮转移路径预测的无人机集群反炮兵搜索路径规划[J]. 系统工程与电子技术, 2025, 47(4): 1222-1234. |
| [6] | 夏雨奇, 黄炎焱, 陈恰. 基于深度Q网络的无人车侦察路径规划[J]. 系统工程与电子技术, 2024, 46(9): 3070-3081. |
| [7] | 费博雯, 包卫东, 刘大千, 朱晓敏. 面向动态目标搜索与打击的空地协同自主任务分配方法[J]. 系统工程与电子技术, 2024, 46(7): 2346-2358. |
| [8] | 李杰, 谭跃进. 基于集成改进蚁群算法的作战环推荐方法[J]. 系统工程与电子技术, 2024, 46(6): 2002-2012. |
| [9] | 孙家玮, 余明晖, 杨大鹏, 汤皓泉, 卞大鹏. 基于CL-RRT与MPC的舰载机牵引系统路径规划[J]. 系统工程与电子技术, 2024, 46(5): 1745-1755. |
| [10] | 隋东, 杨振宇, 丁松滨, 周婷婷. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46(5): 1756-1766. |
| [11] | 刘钢, 安志镖, 张茂军, 刘煜, 李武. 基于连续路网环境的实体化主体路径规划算法[J]. 系统工程与电子技术, 2024, 46(4): 1346-1356. |
| [12] | 赵贵祥, 周健, 李云淼, 王晨旭. 改进双向快速搜索随机树的无人艇路径规划[J]. 系统工程与电子技术, 2024, 46(4): 1364-1371. |
| [13] | 杨平, 肖兵, 陈新, 唐璐琪. 多约束条件下战斗机三维路径规划问题[J]. 系统工程与电子技术, 2024, 46(12): 4213-4221. |
| [14] | 吴尹菲, 李新凯, 张宏立, 陈颖颖, 龚丰金. 基于弹性面域特性的虚拟管道优化与设计[J]. 系统工程与电子技术, 2024, 46(11): 3862-3873. |
| [15] | 唐恒, 孙伟, 吕磊, 贺若飞, 吴建军, 孙昌浩, 孙田野. 融合动态奖励策略的无人机编队路径规划方法[J]. 系统工程与电子技术, 2024, 46(10): 3506-3518. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||