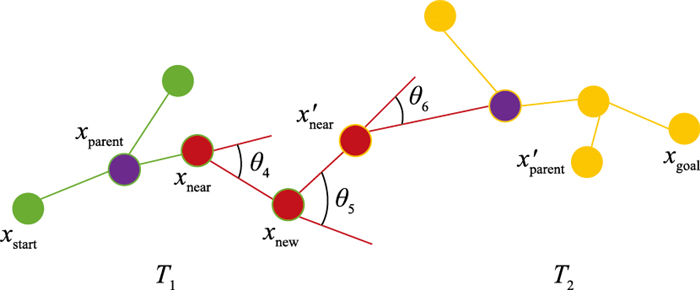
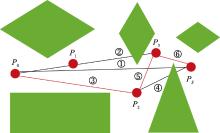
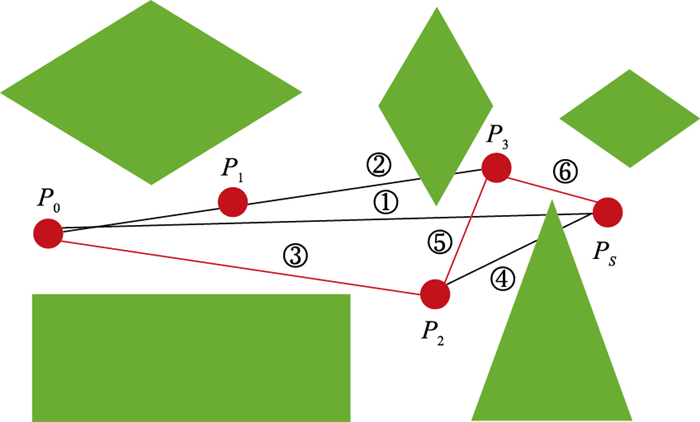
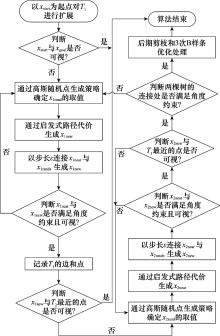
| 1 |
YIN L L , ZHANG R B , GU H W , et al. Research on cooperative perception of MUSVs in complex ocean conditions[J]. Sensors, 2021, 21 (5): 1657.
doi: 10.3390/s21051657
|
| 2 |
HAN S , WANG L , WANG Y T , et al. An efficient motion planning based on grid map: predicted trajectory approach with global path guiding[J]. Ocean Engineering, 2021, 238, 109696.
doi: 10.1016/j.oceaneng.2021.109696
|
| 3 |
WANG J , WANG R T , LU D H , et al. USV dynamic accurate obstacle avoidance based on improved velocity obstacle method[J]. Electronics, 2022, 11 (17): 2720.
doi: 10.3390/electronics11172720
|
| 4 |
WU M Y , ZHANG A M , GAO M , et al. Ship motion planning for MASS based on a multi-objective optimization HA * algorithm in complex navigation conditions[J]. Journal of Marine Science and Engineering, 2021, 9 (10): 1126.
doi: 10.3390/jmse9101126
|
| 5 |
PARK J A , KIM S A , NOH G A , et al. Mission planning and performance verification of an unmanned surface vehicle using a genetic algorithm[J]. International Journal of Naval Architecture and Ocean Engineering, 2021, 13, 575- 584.
doi: 10.1016/j.ijnaoe.2021.07.002
|
| 6 |
GUO X H , JI M J , ZHAO Z W , et al. Global path planning and multi-objective path control for unmanned surface vehicle based on modified particle swarm optimization (PSO) algorithm[J]. Ocean Engineering, 2020, 216 (1): 107693.
|
| 7 |
程谦, 高嵩, 曹凯, 等. 基于PRM优化算法的移动机器人路径规划[J]. 计算机应用与软件, 2020, 37 (12): 254-259, 296.
doi: 10.3969/j.issn.1000-386x.2020.12.040
|
|
CHENG Q , GAO S , CAO K , et al. Path planning of mobile robot based on PRM optimization algotithm[J]. Computer Applications and Software, 2020, 37 (12): 254-259, 296.
doi: 10.3969/j.issn.1000-386x.2020.12.040
|
| 8 |
WANG W , ZUO L , XU X . A learning-based multi-RRT approach for robot path planning in narrow passages[J]. Journal of Intelligent & Robotic Systems, 2018, 90 (1): 81- 100.
|
| 9 |
JEOONG I B , LEE S J , KIM J H . Quick-RRTA * : triangular inequality-based implementation of RRT * with improved initial solution and convergence rate[J]. Expert Systems with Applications, 2019, 123, 82- 90.
doi: 10.1016/j.eswa.2019.01.032
|
| 10 |
高升, 艾剑良, 王之豪. 混合种群RRT无人机航迹规划方法[J]. 系统工程与电子技术, 2020, 42 (1): 101- 107.
|
|
GAO S , AI J L , WANG Z H . Mixed population RRT algorithm for UAV path pianning[J]. Systems Engineering and Electronics, 2020, 42 (1): 101- 107.
|
| 11 |
LAVALLE S M , KUFFNER J J . Rapidly-exploring random trees: progress and prospects[J]. Algorithmic & Computational Robotics New Directions, 2001, 5, 303- 307.
|
| 12 |
XIN P , WANG X M , LIU X L , et al. Improved bidirectional RRT * algorithm for robot path planning[J]. Sensors, 2023, 23 (2): 1041.
doi: 10.3390/s23021041
|
| 13 |
文龙贻彬, 刘友, 穆京京, 等. 无人艇航行规则及运动学约束下的改进RRT轨迹规划方法[J]. 导航与控制, 2020, 19 (1): 105-115, 124.
doi: 10.3969/j.issn.1674-5558.2020.01.012
|
|
WENGLONG Y B , LIU Y , MU J J , et al. Improved RRT trajectory planning methed under unmanned surface vehicle rules and kinematic constraints[J]. Navigation and Control, 2020, 19 (1): 105-115, 124.
doi: 10.3969/j.issn.1674-5558.2020.01.012
|
| 14 |
向金林, 王鸿东, 欧阳子路, 等. 基于改进双向RRT的无人艇局部路径规划算法研究[J]. 中国造船, 2020, 61 (1): 157- 166.
doi: 10.3969/j.issn.1000-4882.2020.01.016
|
|
XIANG J L , WANG H D , OUYANG Z L , et al. Algorithm of local path planning for unmanned surface vehicles based on improved Bi-RRT[J]. Shipbuilding of China, 2020, 61 (1): 157- 166.
doi: 10.3969/j.issn.1000-4882.2020.01.016
|
| 15 |
徐秉超, 严华. 一种改进的双向快速搜索随机树算法[J]. 科学技术与工程, 2020, 20 (19): 7765- 7771.
|
|
XU B C , YAN H . An improved bidirectional rapid-exploring random tree algorithm[J]. Science Technology and Engineering, 2020, 20 (19): 7765- 7771.
|
| 16 |
MA G J , DUAN Y L , LI M E , et al. A probability smoothing Bi-RRT path planning algorithm for indoor robot[J]. Future Generation Computer Systems, 2023, 143, 349- 360.
doi: 10.1016/j.future.2023.02.004
|
| 17 |
MASEKO B B , VAN DAALEN C E , TREURNICHT J . Optimised informed RRTs for mobile robot path planning[J]. IFAC-PapersOnLine, 2021, 54 (21): 157- 162.
doi: 10.1016/j.ifacol.2021.12.027
|
| 18 |
KARAMAN S , FRAZZOLI E . Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30 (7): 846- 894.
doi: 10.1177/0278364911406761
|
| 19 |
QURESHI A H , AYAZ Y . Potential functions based sampling heuristic for optimal path planning[J]. Autonomous Robots, 2016, 40 (6): 1079- 1093.
doi: 10.1007/s10514-015-9518-0
|
| 20 |
AKGUN B, STILMAN M. Sampling heuristics for optimal motion planning in high dimensions[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011: 2640-2645.
|
| 21 |
QURESHI A H , AYAZ Y . Intelligent bidirectional rapidly-exploring random trees for optimal motion planning in complex cluttered environments[J]. Robotics and Autonomous Systems, 2015, 68, 1- 11.
doi: 10.1016/j.robot.2015.02.007
|
| 22 |
LIU H Y , ZHANG X B , WEN J , et al. Goal-biased bidirectional RRT based on curve-smoothing[J]. IFAC-PapersOnLine, 2019, 52 (24): 255- 260.
doi: 10.1016/j.ifacol.2019.12.417
|