
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (7): 2170-2182.doi: 10.12305/j.issn.1001-506X.2023.07.28
李广强, 董文超, 朱大庆, 于越, 陈浩, 于双和
收稿日期:2022-05-09
出版日期:2023-06-30
发布日期:2023-07-11
通讯作者:
李广强
作者简介:李广强(1973—), 男, 副教授, 博士, 主要研究方向为智能控制与优化、智能机器人技术基金资助:Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU
Received:2022-05-09
Online:2023-06-30
Published:2023-07-11
Contact:
Guangqiang LI
摘要:
自主水下机器人(autonomous underwater vehicle, AUV)已成为不同领域多种水下作业最有效的装备之一。针对其全局路径规划问题,提出了一种基于改进鲸鱼优化算法的求解方法。首先对于建模问题, 在环境模型中, 鉴于三维空间中设置路径点的复杂性, 给出了基于连接型快速扩展随机树(connected rapidly-exploring random tree, RRT-Connect)的建模方法; 在数学优化模型中, 综合了路径平滑度、下潜梯度和航行时间等3项评价准则, 并考虑了强海流及障碍物带来的相关约束。然后针对上述模型, 提出了一种改进的鲸鱼优化算法。引入了基于问题连接结构的优化思想, 据此在线构建了关键子集族和有效子集族, 用于实时发现关键度和有效度较高的连接集, 并增大其重复利用率, 以提高算法的收敛速度和精度。此外, 为更全面有效地利用历史进化信息, 设计了多学习集构造个体引领者及联合引导策略, 以进一步增强算法的整体性能。最后根据实际海底地形信息和不同海流模型, 设置了多种路径规划情形进行仿真实验。结果表明, 相对于文献中其他鲸鱼优化算法和经典算法, 所提算法在求解精度、收敛速度和稳定性等方面均表现更为出色, 可较好地满足AUV航行的路径规划需求。
中图分类号:
李广强, 董文超, 朱大庆, 于越, 陈浩, 于双和. 基于改进鲸鱼优化算法的AUV三维路径规划[J]. 系统工程与电子技术, 2023, 45(7): 2170-2182.
Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm[J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182.

图1
搜索空间的分解"


图2
海流影响下AUV相对海底的航行速度vi"


图3
实验所选的海底地形环境"
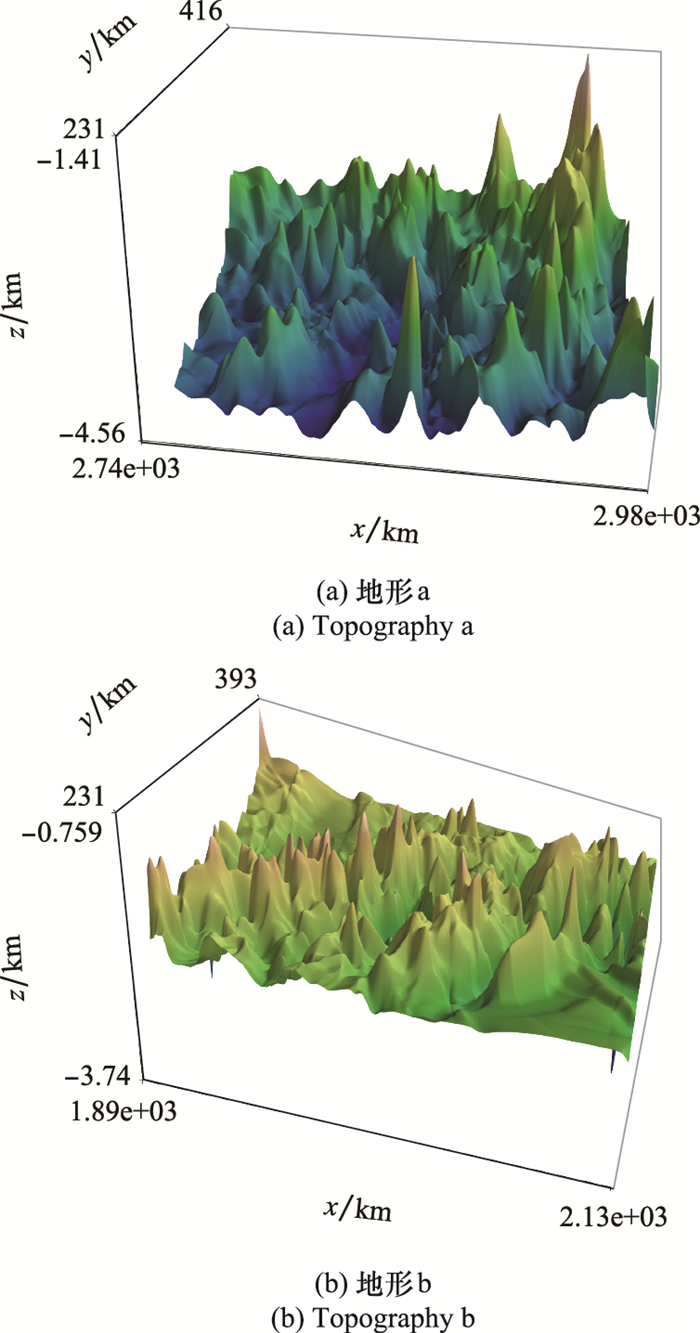
表1
实验情形的参数设置"
| 情形 | 地形 | 海流 | 起始点/km | 目标点/km |
| 1 | a | m | (2 758.82, 415.89, -1.43) | (2 964.60, 301.25, -4.01) |
| 2 | b | n | (1 910.45, 236.25, -0.47) | (2 113.89, 351.25, -3.16) |
| 3 | a | n | (2 758.82, 415.89, -3.09) | (2 964.60, 301.25, -4.01) |
| 4 | b | m | (1 910.45, 236.25, -1.98) | (2 113.89, 351.25, -3.16) |
表2
实验情形的路径点数目设置"
| 情形 | 基本路径点数目 | 倍增路径点数目 | ||
| 1倍 | 2倍 | 3倍 | ||
| 1 | 5 | 5 | 10 | 15 |
| 2 | 6 | 6 | 12 | 18 |
| 3 | 6 | 6 | 12 | 18 |
| 4 | 7 | 7 | 14 | 21 |

图4
各算法在情形1和情形2所得最优路径"


图5
各算法在情形3和情形4所得最优路径"

表3
算法所得最优路径的目标函数值对比"
| 情形 | 路径点数 | WOA | BMWOA | IWOSSA | HWOAG | PSO | DE | IWOA |
| 1 | 5 | 336 161.0 | 336 414.8 | 366 179.6 | 358 860.0 | 339 030.2 | 335 388.0 | 335 451.2 |
| 10 | 341 506.8 | 336 081.4 | 428 444.0 | 395 198.4 | 344 247.0 | 335 874.2 | 333 080.8 | |
| 15 | 656 472.4 | 491 059.8 | # | 498 216.6 | 458 622.6 | 341 501.6 | 332 501.4 | |
| 2 | 6 | 242 808.8 | 241 502.8 | 241 340.0 | 249 229.2 | 312 066.2 | 241 209.0 | 242 209.8 |
| 12 | 272 312.4 | 267 106.2 | 271 696.6 | 268 900.2 | # | 239 711.4 | 238 370.6 | |
| 18 | # | # | # | # | # | 262 821.6 | 237 803.2 | |
| 3 | 6 | 276 393.6 | 276 022.8 | 277 964.8 | 279 114.0 | 276 084.8 | 274 896.6 | 274 514.0 |
| 12 | 293 664.4 | 292 704.6 | 293 966.2 | 291 643.0 | 295 763.0 | 268 731.4 | 267 984.8 | |
| 18 | # | # | # | # | # | 270 212.2 | 266 882.4 | |
| 4 | 7 | 354 772.8 | 349 677.8 | 365 973.0 | 376 550.0 | 350 856.0 | 343 702.8 | 345 397.0 |
| 14 | 348 429.8 | 383 541.2 | 430 427.4 | 419 801.8 | 349 842.8 | 345 915.6 | 343 171.4 | |
| 21 | 463 174.0 | 780 443.4 | # | 437 306.6 | 369 718.6 | 353 991.0 | 344 885.4 |
表4
同一精度标准下算法所用适应度函数评价次数对比"
| 情形 | 路径点数 | WOA | BMWOA | IWOSSA | HWOAG | PSO | DE | IWOA |
| 1 | 5 | 37 120 | 34 545 | 89 620 | 93 010 | 34 460 | 34 670 | 23 790 |
| 2 | 12 | 53 690 | 51 458 | 95 821 | 91 161 | # | 67 350 | 21 555 |
| 3 | 12 | 71 522 | 87 215 | 93 630 | 92 012 | 73 345 | 51 180 | 18 185 |
| 4 | 21 | 59 583 | 89 338 | # | 12 240 | 23 969 | 24 290 | 15 205 |
表5
算法规划结果的成功率和相关标准差对比"
| 情形 | 路径点数 | 性能指标 | WOA | BMWOA | IWOSSA | HWOAG | PSO | DE | IWOA |
| 1 | 5 | 成功率/% | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| 相关标准差 | 15 220.0 | 8 523.0 | 10 316.2 | 57 898.4 | 28 723.2 | 4 149.2 | 412.2 | ||
| 10 | 成功率/% | 100 | 100 | 50 | 100 | 100 | 100 | 100 | |
| 相关标准差 | 84 120.0 | 96 531.8 | 110 657.2 | 33 609.4 | 85 818.8 | 11 422.2 | 2 700.0 | ||
| 15 | 成功率/% | 90 | 90 | 0 | 100 | 50 | 100 | 100 | |
| 相关标准差 | 37 331.8 | 104 553.8 | # | 13 016.0 | 103 182.4 | 18 616.4 | 7 307.1 | ||
| 2 | 6 | 成功率/% | 50 | 90 | 30 | 40 | 20 | 100 | 100 |
| 相关标准差 | 6 953.8 | 1 169.4 | 7 935.6 | 9 259.2 | 10 552.6 | 881.8 | 385.4 | ||
| 12 | 成功率/% | 20 | 40 | 30 | 30 | 0 | 90 | 100 | |
| 相关标准差 | 79 273.2 | 76 167.8 | 106 734.6 | 25 870.6 | # | 3 844.2 | 457.6 | ||
| 18 | 成功率/% | 0 | 0 | 0 | 0 | 0 | 50 | 90 | |
| 相关标准差 | # | # | # | # | # | 58 781.6 | 4 809.2 | ||
| 3 | 6 | 成功率/% | 30 | 30 | 40 | 30 | 20 | 100 | 100 |
| 相关标准差 | 3 187.6 | 5 630.0 | 7 450.2 | 2 852.6 | 3 867.0 | 382.4 | 338.0 | ||
| 12 | 成功率/% | 30 | 20 | 30 | 30 | 20 | 100 | 100 | |
| 相关标准差 | 57 039.6 | 63 058.2 | 94 418.4 | 26 315.4 | 87 847.8 | 1 475.4 | 699.2 | ||
| 18 | 成功率/% | 0 | 0 | 0 | 0 | 0 | 60 | 100 | |
| 相关标准差 | # | # | # | # | # | 15 598.6 | 1 074.1 | ||
| 4 | 7 | 成功率/% | 100 | 100 | 100 | 100 | 90 | 100 | 100 |
| 相关标准差 | 15 595.6 | 14 198.8 | 9 887.6 | 9 218.0 | 8 257.4 | 1 740.0 | 1 185.2 | ||
| 14 | 成功率/% | 90 | 80 | 70 | 90 | 50 | 100 | 100 | |
| 相关标准差 | 51 063.6 | 90 897.0 | 71 124.6 | 11 736.0 | 61 446.6 | 6 098.2 | 6 858.7 | ||
| 21 | 成功率/% | 70 | 60 | 0 | 100 | 40 | 100 | 100 | |
| 相关标准差 | 109 533.2 | 91 635.6 | # | 28 546.6 | 55 493.0 | 16 471.6 | 13 157.1 |
| 24 |
CENCINI M , LACORATA G , VULPIANI A , et al. Mixing in a meandering jet: a markovian approximation[J]. Journal of Physical Oceanography, 1999, 29 (10): 2578- 2594.
doi: 10.1175/1520-0485(1999)029<2578:MIAMJA>2.0.CO;2 |
| 25 | KALA R , WARWICK K . Multi-vehicle planning using RRT-connect[J]. Paladyn, Journal of Behavioral Robotics, 2011, 2 (3): 134- 144. |
| 26 | BOUTER A , ALDERLIESTEN T , BOSMAN P A N . Achieving highly scalable evolutionary real-valued optimization by exploiting partial evaluations[J]. Evolutionary Computation, 2021, 29 (1): 129- 155. |
| 27 | BOUTER A, ALDERLIESTEN T, WITTEVEEN C, et al. Exploiting linkage information in real-valued optimization with the real-valued gene-pool optimal mixing evolutionary algorithm[C]//Proc. of the Genetic and Evolutionary Computation Conference, 2017: 705-712. |
| 28 | OLIEMAN C , BOUTER A , BOSMAN P A N . Fitness-based linkage learning in the real-valued gene-pool optimal mixing evolutionary algorithm[J]. IEEE Trans.on Evolutionary Computation, 2021, 25 (2): 358- 370. |
| 29 | WANG Y P , LIU H Y , WEI F , et al. Cooperative coevolution with formula-based variable grouping for large-scale global optimization[J]. Evolutionary Computation, 2018, 26 (4): 569- 596. |
| 30 | LIU Y H , CAO B Y , LI H H . Improving ant colony optimization algorithm with epsilon greedy and levy flight[J]. Complex & Intelligent Systems, 2021, 7 (4): 1711- 1722. |
| 31 | LI G Q, DONG W C, WANG Y J, et al. Path planning of underwater vehicles based on improved whale optimization algorithm[C]//Proc. of the International Conference on Automation, Control and Robotics Engineering, 2021: 444-448. |
| 32 | WANG M , LUO J , WALTER U . Trajectory planning of free-floating space robot using particle swarm optimization (PSO)[J]. Acta Astronautica, 2015, 112, 77- 88. |
| 33 | ZAMUDA A , HERNÁNDEZ SOSA J D . Differential evolution and underwater glider path planning applied to the short-term opportun-nistic sampling of dynamic mesoscale ocean structures[J]. Applied Soft Computing, 2014, 24, 95- 108. |
| 34 | GEBCO Compilation Group. The GEBCO_2020 grid[EB/OL]. [2022-04-17]. https://www.gebco.net/data_and_products/gridded_bathymetry_data/gebco_2020. |
| 1 |
ATAEI M , YOUSEFI-KOMA A . Three-dimensional optimal path planning for waypoint guidance of an autonomous underwater vehicle[J]. Robotics and Autonomous Systems, 2015, 67, 23- 32.
doi: 10.1016/j.robot.2014.10.007 |
| 2 |
ZENG Z , LIAN L , SAMMUT K , et al. A survey on path planning for persistent autonomy of autonomous underwater vehicles[J]. Ocean Engineering, 2015, 110, 303- 313.
doi: 10.1016/j.oceaneng.2015.10.007 |
| 3 |
LI Y , MA T , CHEN P Y , et al. Autonomous underwater vehicle optimal path planning method for seabed terrain matching navigation[J]. Ocean Engineering, 2017, 133, 107- 115.
doi: 10.1016/j.oceaneng.2017.01.026 |
| 4 | LIU X A , MA D L , YANG M Q , et al. Modified block A* path-planning method for hybrid-driven underwater gliders[J]. IEEE Journal of Oceanic Engineering, 2021, 47 (1): 20- 31. |
| 5 |
GE H Q , CHEN G B , XU G . Multi-AUV cooperative target hunting based on improved potential field in a surface-water environment[J]. Applied Sciences, 2018, 8 (6): 973.
doi: 10.3390/app8060973 |
| 6 | 冯豪博, 胡桥, 赵振轶. 基于精英族系遗传算法的AUV集群路径规划[J]. 系统工程与电子技术, 2022, 44 (7): 2251- 2262. |
| FENG H B , HU Q , ZHAO Z Y . AUV swarm path planning based on elite family genetic algorithm[J]. Systems Engineering and Electronics, 2022, 44 (7): 2251- 2262. | |
| 7 | 张岳星, 王轶群, 李硕, 等. 基于海图和改进粒子群优化算法的AUV全局路径规划[J]. 机器人, 2020, 42 (1): 120- 128. |
| ZHANG Y X , WANG Y Q , LI S , et al. Global path planning for AUV based on charts and the improved particle swarm optimization algorithm[J]. Robot, 2020, 42 (1): 120- 128. | |
| 8 |
TAHERI E , FERDOWSI M H , DANESH M . Closed-loop randomized kinodynamic path planning for an autonomous underwater vehicle[J]. Applied Ocean Research, 2019, 83, 48- 64.
doi: 10.1016/j.apor.2018.12.008 |
| 9 |
CHEN M Z , ZHU D Q . Optimal time-consuming path planning for autonomous underwater vehicles based on a dynamic neural network model in ocean current environments[J]. IEEE Trans.on Vehicular Technology, 2020, 69 (12): 14401- 14412.
doi: 10.1109/TVT.2020.3034628 |
| 10 |
ALBARAKATI S , LIMA R M , GIRALDI L , et al. Optimal 3D trajectory planning for AUVs using ocean general circulation models[J]. Ocean Engineering, 2019, 188, 106266.
doi: 10.1016/j.oceaneng.2019.106266 |
| 11 |
ALBARAKATI S , LIMA R M , THEUSSL T , et al. Optimal 3D time-energy trajectory planning for auvs using ocean general circulation models[J]. Ocean Engineering, 2020, 218, 108057.
doi: 10.1016/j.oceaneng.2020.108057 |
| 12 |
MA Y N , GONG Y J , XIAO C F , et al. Path planning for autonomous underwater vehicles: an ant colony algorithm incorporating alarm pheromone[J]. IEEE Trans.on Vehicular Technology, 2019, 68 (1): 141- 154.
doi: 10.1109/TVT.2018.2882130 |
| 13 |
ZENG Z , LAMMAS A , SAMMUT K , et al. Shell space decomposition based path planning for AUVs operating in a variable environment[J]. Ocean Engineering, 2014, 91, 181- 195.
doi: 10.1016/j.oceaneng.2014.09.001 |
| 14 |
MIRJALILI S , LEWIS A . The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95, 51- 67.
doi: 10.1016/j.advengsoft.2016.01.008 |
| 15 |
BUI D T , ABDULLAHI M M , GHAREH S , et al. Fine-tuning of neural computing using whale optimization algorithm for predicting compressive strength of concrete[J]. Engineering with Computers, 2021, 37 (1): 701- 712.
doi: 10.1007/s00366-019-00850-w |
| 16 |
PETROVIC M , MILJKOVIC Z , JOKIC A . A novel methodo-logy for optimal single mobile robot scheduling using whale optimization algorithm[J]. Applied Soft Computing, 2019, 81, 105520.
doi: 10.1016/j.asoc.2019.105520 |
| 17 |
SAAFAN M M , EL-GENDY E M . IWOSSA: an improved whale optimization salp swarm algorithm for solving optimization problems[J]. Expert Systems with Applications, 2021, 176, 114901.
doi: 10.1016/j.eswa.2021.114901 |
| 18 |
ZHANG X M , WEN S C . Hybrid whale optimization algorithm with gathering strategies for high-dimensional problems[J]. Expert Systems with Applications, 2021, 179, 115032.
doi: 10.1016/j.eswa.2021.115032 |
| 19 | 褚鼎立, 陈红, 王旭光. 基于自适应权重和模拟退火的鲸鱼优化算法[J]. 电子学报, 2019, 47 (5): 992- 999. |
| CHU D L , CHEN H , WANG X G . Whale optimization algorithm based on adaptive weight and simulated annealing[J]. Acta Electronica Sinica, 2019, 47 (5): 992- 999. | |
| 20 | HEIDARI A A , ALJARAH I , FARIS H , et al. An enhanced associative learning-based exploratory whale optimizer for glo-bal optimization[J]. Neural Computing & Applications, 2020, 32 (9): 5185- 5211. |
| 21 |
ABD ELAZIZ M , LU S F , HE S B . A multi-leader whale optimization algorithm for global optimization and image segmentation[J]. Expert Systems with Applications, 2021, 175, 114841.
doi: 10.1016/j.eswa.2021.114841 |
| 22 |
SUN Y J , CHEN Y . Multi-population improved whale optimization algorithm for high dimensional optimization[J]. Applied Soft Computing, 2021, 112, 107854.
doi: 10.1016/j.asoc.2021.107854 |
| 23 | HADSELL R, BAGNELL J A, HUBER D, et al. Accurate rough terrain estimation with space-carving kernels[C]//Proc. of the Robotics: Science and Systems, 2009. |
| [1] | 刘瑶, 夏阳升, 石建迈, 陈超, 黄金才. 车载多无人机协同多区域覆盖路径规划方法[J]. 系统工程与电子技术, 2023, 45(5): 1380-1390. |
| [2] | 韩维, 刘子玄, 苏析超, 崔凯凯, 刘洁. 结合启发式与最优控制的舰载机甲板路径规划算法[J]. 系统工程与电子技术, 2023, 45(4): 1098-1110. |
| [3] | 张浩杰, 张玉东, 梁荣敏, 杨甜甜. 改进A*算法的机器人能耗最优路径规划方法[J]. 系统工程与电子技术, 2023, 45(2): 513-520. |
| [4] | 冯豪博, 胡桥, 赵振轶. 基于精英族系遗传算法的AUV集群路径规划[J]. 系统工程与电子技术, 2022, 44(7): 2251-2262. |
| [5] | 尹洋, 杨全顺, 王征, 刘洋. 通信距离约束下的无人船集群覆盖搜索方法[J]. 系统工程与电子技术, 2022, 44(12): 3821-3828. |
| [6] | 杨清清, 高盈盈, 郭玙, 夏博远, 杨克巍. 基于深度强化学习的海战场目标搜寻路径规划[J]. 系统工程与电子技术, 2022, 44(11): 3486-3495. |
| [7] | 马威强, 高永琪, 赵苗. 基于全局最优和差分变异的头脑风暴优化算法[J]. 系统工程与电子技术, 2022, 44(1): 270-278. |
| [8] | 焦志强, 张杰勇, 姚佩阳, 王勋, 何宜超. 基于分层结构的C4ISR服务部署分布式演化方法[J]. 系统工程与电子技术, 2021, 43(6): 1572-1585. |
| [9] | 王文明, 杜佳璐. 基于正六边形栅格JPS算法的智能体路径规划[J]. 系统工程与电子技术, 2021, 43(12): 3635-3642. |
| [10] | 李亚南, 黄海滨, 陈亮名, 庄宇飞, 王晓丽. 变化海流环境下AUV能量最优三维路径规划[J]. 系统工程与电子技术, 2021, 43(12): 3667-3674. |
| [11] | 李文刚, 汪流江, 方德翔, 李玉玮, 黄郡. 联合A*与动态窗口法的路径规划算法[J]. 系统工程与电子技术, 2021, 43(12): 3694-3702. |
| [12] | 陈岱岱, 李玩幽. 带拖线阵的水面无人艇局部路径规划算法[J]. 系统工程与电子技术, 2020, 42(9): 1988-1994. |
| [13] | 张泉先, 曾斌, 李厚朴. 海况影响下的分布式海战补给路径规划方法[J]. 系统工程与电子技术, 2020, 42(10): 2312-2319. |
| [14] | 时维国, 国明. 鲸鱼优化相关向量机的网络控制系统变采样周期调度[J]. 系统工程与电子技术, 2020, 42(10): 2348-2355. |
| [15] | 杨秀霞, 曹唯一, 张毅. 时间和角度约束下的双圆弧路径规划[J]. 系统工程与电子技术, 2019, 41(8): 1835-1843. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||