
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (4): 1255-1264.doi: 10.12305/j.issn.1001-506X.2025.04.22
王雯, 赵凯南, 杨林, 杨雄军
收稿日期:2023-09-27
出版日期:2025-04-25
发布日期:2025-05-28
通讯作者:
赵凯南
作者简介:王雯(1989—), 女, 工程师, 博士, 主要研究方向为指挥信息系统Wen WANG, Kainan ZHAO, Lin YANG, Xiongjun YANG
Received:2023-09-27
Online:2025-04-25
Published:2025-05-28
Contact:
Kainan ZHAO
摘要:
针对复杂环境下态势动态变化、信息获取渠道受阻导致难以确保任务完成的问题, 开展面向复杂场景不确定性的任务规划技术研究。在分析任务方案内容的基础上, 提出灵活动态、细粒度分配的任务规划方法, 建立通用的层次式任务规划模型, 重点解决任务方案难以适应场景变化、不确定性因素发生时无法满足任务需求的问题, 提升在复杂场景下任务规划的有效性。通过仿真验证, 层次式任务规划方法能够提升70%的任务规划效率, 同时优化了资源利用率。
中图分类号:
王雯, 赵凯南, 杨林, 杨雄军. 面向复杂场景的层次式任务规划方法[J]. 系统工程与电子技术, 2025, 47(4): 1255-1264.
Wen WANG, Kainan ZHAO, Lin YANG, Xiongjun YANG. Hierarchical task planning approach for complex scenarios[J]. Systems Engineering and Electronics, 2025, 47(4): 1255-1264.
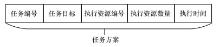
图1
传统任务方案的格式"
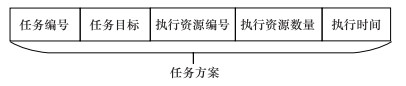

图2
松耦合任务方案格式"
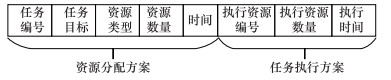
表1
松耦合任务方案相关符号"
| 符号表示 | 含义 |
| T | 任务 |
| rai | 资源分配方案 |
| zaik | 任务执行方案 |
| rai|zaik | 任务方案 |
| s(T, rai|zaik) | 任务方案rai|zaik对任务T的满足性 |
| p | 单个任务单元失效概率 |
| d | 任务方案切换平均时延 |
| transfer(rai|zaik, T) | 任务T调整当前任务方案rai|zaik |
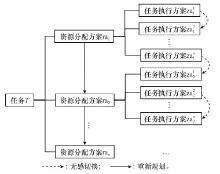
图3
任务方案调整"
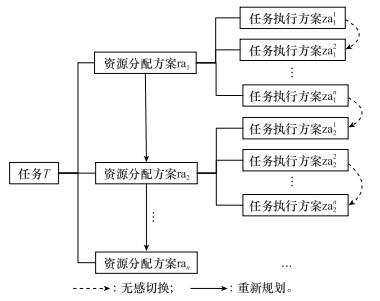
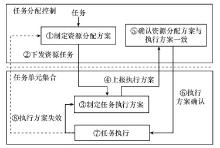
图4
层次化任务规划流程"
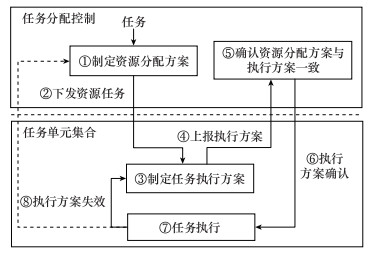
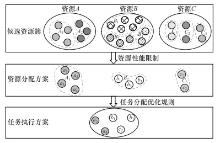
图5
任务执行方案生成过程"
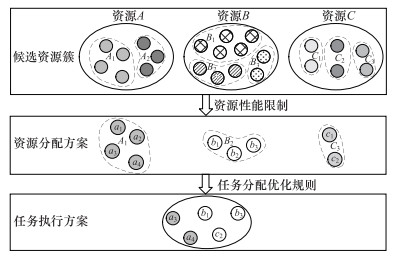
表2
层次化任务规划相关符号"
| 符号表示 | 含义 |
| zin | 任务资源个体 |
| Zi={zi1, zi2, …, zini} | 同种资源类型个体构成资源集合Zi |
| Cij={zin} | Zi按照个体差异划分为多个资源簇Cij |
| T={t1, t2, …, tht} | 任务T包括多个子任务 |
| ra={(th, {Cij, n(th, Cij)})} | 资源分配方案ra中子任务th需要资源簇Cij中n(th, Cij)个资源 |
| Cij∈ra | 资源分配方案ra中的资源簇Cij中存在个体参与执行任务 |
| limit(th, Zi) | 子任务th对资源Zi的能力要求 |
| require(th, Zi) | 子任务th对资源Zi的需求量 |
| $\mathrm{za} \subset \mathrm{ra}$ | 可根据资源分配方案ra 生成执行单元分配方案za |
| za={(th, {zit})} | 执行单元分配方案中子任务th 由资源个体集合{zit}执行 |
| zit∈za | 执行单元分配方案za中的zit用于执行任务 |
| cap(Cij) | 资源簇Cij的平均能力 |
| cap(zit) | 资源个体zit的平均能力 |
| comb(rai) | 组合资源分配方案rai下的任务执行方案 |
| comb(T) | 针对任务T, 组合资源分配方案及其对应任务执行方案 |
| avail(zit) | 资源个体zit的可用状态 |
表3
任务单元及聚合分类"
| 集群 | 任务单元 | 聚合分类 |
| b1 | b11(0.9, 10), b12(0.9, 9), b13(0.8, 9), b14(0.7, 6), b15(0.6, 7), b16(0.6, 6), b17(0.6, 7), b18(0.4, 6), b19(0.5, 5), b110(0.6, 5) | {b11, b12, b13}(0.87, 9, 3), {b14, b15, b16, b17}(0.63, 6.5, 2), {b18, b19, b110}(0.5, 5.3, 1) |
| b2 | b21(0.8, 6), b22(0.7, 7), b23(0.8, 7), b24(0.6, 7), b25(0.6, 5), b26(0.6, 6), b27(0.9, 8), b28(0.8, 9), b29(0.9, 9) | {b21, b22, b23}(0.77, 6.67, 4), {b24, b25, b26}(0.6, 6, 1), {b27, b28, b29}(0.87.8.67, 3) |
| b3 | b31(0.6, 5), b32(0.6, 6), b33(0.6, 6), b34(0.5, 4), b35(0.5, 4), b36(0.5, 4), b37(0.4, 3), b38(0.4, 3) | {b31, b32, b33}(0.6, 5.67, 3), {b34, b35, b36}(0.5, 4, 4), {b37, b38}(0.4, 3, 1) |
| b4 | b41(0.8, 7), b42(0.7, 8), b43(0.5, 6), b44(0.6, 5), b45(0.7, 6), b46(0.6, 7), b47(0.4, 4), b48(0.4, 5), b49(0.5, 4) | {b41, b42}(0.75, 7.5, 2), {b43, b44}(0.55, 6.5, 2), {b45, b46}(0.65, 6.5, 4), {b47, b48, b49}(0.43, 4.33, 1) |
| b5 | b51(0.6, 6), b52(0.7, 6), b53(0.6, 5), b54(0.5, 5), b55(0.6, 5), b56(0.8, 8), b57(0.8, 7) | {b51, b52}(0.65, 6, 3), {b53, b54, b55}(0.57, 5, 1), {b56, b57}(0.8, 7.5, 4) |
表4
待分配任务清单"
| 任务 | t1 | t2 | t3 | t4 | t5 | t6 | t7 | t8 | t9 | t10 |
| 资源需求量 | 1 | 2 | 5 | 1 | 4 | 3 | 3 | 1 | 3 | 2 |
| 单元资源能力要求 | ≥0.6 | ≥0.3 | ≥0.4 | ≥0.3 | ≥0.6 | ≥0.7 | ≥0.5 | ≥0.6 | ≥0.5 | ≥0.5 |
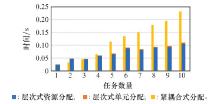
图6
任务分配时间消耗"
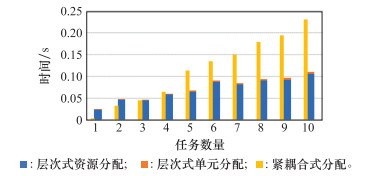
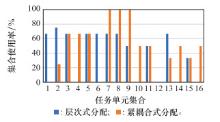
图7
任务单元集合使用率"
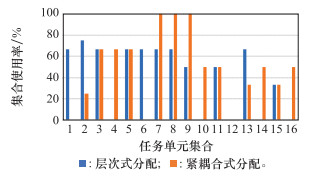
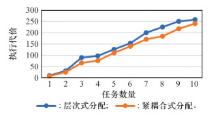
图8
任务方案执行代价"
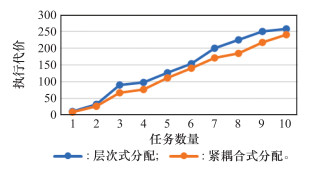
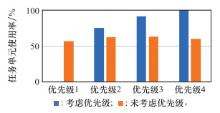
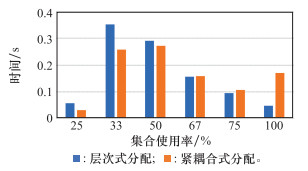
图9
考虑分配优先级的任务单元使用率"
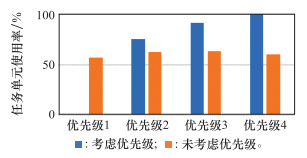
图10
方案组合消耗时间"
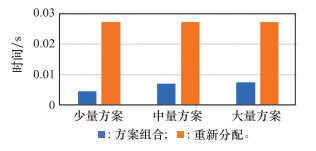
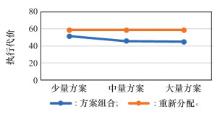
图11
方案组合的任务执行代价"
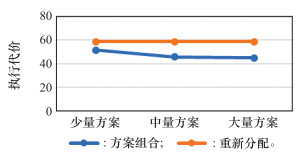
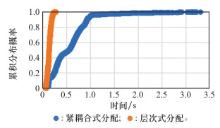
图12
随机仿真任务分配消耗时间累积分布"
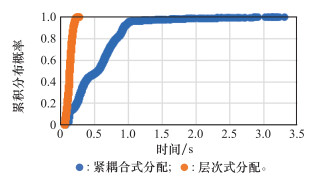
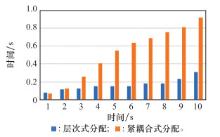
图13
随机仿真任务分配平均消耗时间"
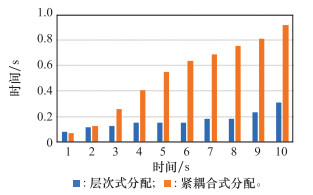
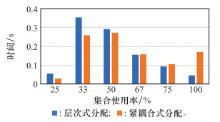
图14
随机仿真任务单元集合使用率"
| 1 | 孙鑫, 陈晓东, 曹晓文, 等. 军用任务规划技术综述与展望[J]. 指挥与控制学报, 2017, 3 (4): 289- 298. |
| SUN X , CHEN X D , CAO X W , et al. Review and prospect of military mission planning technology[J]. Journal of Command and Control, 2017, 3 (4): 289- 298. | |
| 2 | 赵国宏, 罗雪山. 作战任务规划系统研究[J]. 指挥与控制学报, 2015, 1 (4): 391- 394. |
| ZHAO G H , LUO X S . On operation mission planning system[J]. Journal of Command and Control, 2015, 1 (4): 391- 394. | |
| 3 |
HEBAH E , KAMAL Y T . Dynamic task allocation in an uncertain environment with heterogeneous multi-agents[J]. Autonomous Robots, 2019, 43 (7): 1639- 1664.
doi: 10.1007/s10514-018-09820-5 |
| 4 | 张永夫, 刘洋, 袁禾. 不确定性下任务规划方法研究综述[J]. 军事运筹与系统工程, 2021, 35 (4): 68- 72. |
| ZHANG Y F , LIU Y , YUAN H . Summary of research on mission planning methods under uncertainty[J]. Military Operations Research and Systems Engineering, 2021, 35 (4): 68- 72. | |
| 5 | 胡晓峰, 荣明. 关于联合作战规划系统的几个问题[J]. 指挥与控制学报, 2017, 3 (4): 273- 280. |
| HU X F , RONG M . Joint operation planning systems: issues and prospects[J]. Journal of Command and Control, 2017, 3 (4): 273- 280. | |
| 6 | SKALTSIS G M, SHIN H S, TSOURDOS A. A survey of task allocation techniques in MAS[C]//Proc. of the International Conference on Unmanned Aircraft Systems, 2021: 488-497. |
| 7 | 马悦, 吴琳, 许霄, 等. 智能化作战任务规划需求分析[J]. 指挥控制与仿真, 2021, 43 (4): 61- 67. |
| MA Y , WU L , XU X , et al. Requirement analysis of intelligent operation task planning[J]. Command Control & Simulation, 2021, 43 (4): 61- 67. | |
| 8 | 董倩. 基于行为树的空中作战行动分层智能规划方法研究[D]. 长沙: 国防科技大学, 2018. |
| DONG Q. Study on intelligent hierarchical operations planning methodology for air combat based on behavior tree model[D]. Changsha: National University of Defense Technology, 2018. | |
| 9 | SAFRONOV E, COLLEDANCHISE M, NATALE L. Task planning with belief behavior trees[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2020. |
| 10 | 吴歇尔. 面向多无人机的协同任务预分配及重分配研究[D]. 南昌: 南昌航空大学, 2018. |
| WU X E. Coordination tasks pre-allocation and redistribution studies in UAVs[D]. Nanchang: Nanchang Hangkong University, 2018. | |
| 11 | 刘东红. 基于可计算任务树的人机混合智能任务规划新范式[J]. 指挥与控制学报, 2023, 9 (1): 85- 92. |
| LIU D H . A new paradigm of human-machine hybrid intelligent mission planning based on computational mission tree[J]. Journal of Command and Control, 2023, 9 (1): 85- 92. | |
| 12 | ZHANG Y X , CHEN C , SHI J M . Resource allocation heuristics for project scheduling[J]. Applied Mechanics and Materials, 2013, 409, 1539- 1542. |
| 13 | 梁星星, 马扬, 冯旸赫, 等. 基于预测编码的样本自适应行动策略规划[J]. 软件学报, 2022, 33 (4): 1477- 1500. |
| LIANG X X , MA Y , FENG Y H , et al. Sample adaptive policy planning based on predictive coding[J]. Journal of Software, 2022, 33 (4): 1477- 1500. | |
| 14 | ZHANG Y, SREEDHARAN S, KULKARNI A, et al. Plan explicability and predictability for robot task planning[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2017. |
| 15 | 曹雷, 孙彧, 陈希亮, 等. 联合作战任务智能规划关键技术及其应用思考[J]. 国防科技, 2020, 41 (3): 49- 56. |
| CAO L , SUN Y , CHEN X L , et al. The key technology in intelligent planning for joint operations and its application[J]. National Defense Science and Technology, 2020, 41 (3): 49- 56. | |
| 16 | 易侃, 张杰勇, 焦志强, 等. 基于层次任务网络的作战任务系统功能映射方法[J]. 系统工程与电子技术, 2023, 45 (10): 3183- 3191. |
| YI K , ZHANG J Y , JIAO Z Q , et al. Combat task-system function mapping method based on hierarchical task network[J]. Systems Engineering and Electronics, 2023, 45 (10): 3183- 3191. | |
| 17 | CHENG Y J , SUN L T , TOMIZUKA M . Human-aware robot task planning based on a hierarchical task model[J]. IEEE Robotics and Automation Letters, 2021, 6 (2): 1136- 1143. |
| 18 | OH Y , PATEL R , NGUYEN T , et al. Hierarchical planning with state abstractions for temporal task specifications[J]. Autonomous Robots, 2022, 46 (6): 667- 683. |
| 19 | 张宏军, 邵天浩, 程恺, 等. 基于HTN的混合式作战计划监视与重规划方法研究[J]. 军事运筹与系统工程, 2021, 35 (2): 18- 25. |
| ZHANG H J , SHAO T H , CHENG K , et al. Research on hybrid mission planning monitoring and replanning based on HTN[J]. Military Operations Research and Systems Engineering, 2021, 35 (2): 18- 25. | |
| 20 |
邵天浩, 张宏军, 程恺, 等. 层次任务网络中的重新规划研究综述[J]. 系统工程与电子技术, 2020, 42 (12): 2833- 2846.
doi: 10.3969/j.issn.1001-506X.2020.12.21 |
|
SHAO T H , ZHANG H J , CHENG K , et al. Review of replanning in hierarchical task network[J]. Systems Engineering and Electronics, 2020, 42 (12): 2833- 2846.
doi: 10.3969/j.issn.1001-506X.2020.12.21 |
|
| 21 | BAI G Q , CHEN Y L , HU X Y , et al. Correction redistribution mechanism based on forward-reverse solutions and real-time path dynamic adaptive re-planning for multi-AUVs collaborative search[J]. IEEE Trans.on Intelligent Transportation Systems, 2024, 25 (7): 7583- 7601. |
| 22 | 王喆, 王红卫, 唐攀, 等. 考虑资源分配的HTN规划方法及其应用[J]. 管理科学学报, 2013, 16 (3): 53- 60. |
| WANG Z , WANG H W , TANG P , et al. HTN planning method with resource allocation and its application[J]. Journal of Management Sciences in China, 2013, 16 (3): 53- 60. | |
| 23 | LI M L, YANG W J, CAI Z X, et al. Integrating decision sharing with prediction in decentralized planning for multi-agent coordination under uncertainty[C]//Proc. of the 28th International Joint Conference on Artificial Intelligence Main Track, 2019. |
| 24 | 马悦, 吴琳, 郭圣明. 作战任务分配建模及求解方法研究[J]. 系统仿真学报, 2023, 35 (4): 887- 898. |
| MA Y , WU L , GUO S M . Research on modeling and solution method of operational tasks assignment[J]. Journal of System Simulation, 2023, 35 (4): 887- 898. | |
| 25 | 刘兆鹏, 司光亚, 唐宇波, 等. 联合作战资源调度模型研究[J]. 科技导报, 2019, 37 (13): 23- 31. |
| LIU Z P , SI G Y , TANG Y B , et al. A joint operation resource scheduling model by way of genetic fuzzy network[J]. Science & Technology Review, 2019, 37 (13): 23- 31. | |
| 26 | 马硕, 马亚平. 基于分层目标任务网络的作战任务规划方法[J]. 火力与指挥控制, 2020, 45 (2): 110- 114. |
| MA S , MA Y P . A mission planning method based on hierarchical goal-task network[J]. Fire Control & Command Control, 2020, 45 (2): 110- 114. | |
| 27 | LI Y F , HUANG H J . Efficient task planning for heterogeneous AGVs in warehouses[J]. IEEE Trans.on Intelligent Transportation Systems, 2024, 25 (8): 100- 1019. |
| 28 | ZHANG K, LUCET E, SANDRETTO J A, et al. Task and motion planning methods: applications and limitations[C]//Proc. of the 19th International Conference on Informatics in Control, Automation and Robotics, 2022. |
| 29 | LIU J M , CHEN Y G , WANG R , et al. Complex task planning method of space-aeronautics cooperative observation based on multi-layer interaction[J]. Journal of Systems Engineering and Electronics, 2023, 34 (6): 1550- 1564. |
| 30 | 曾斌, 樊旭, 李厚朴. 支持重规划的战时保障动态调度研究[J]. 自动化学报, 2023, 49 (7): 1519- 1529. |
| ZENG B , FAN X , LI H P . Research of dynamic scheduling with re-planning for wartime logistics support[J]. Acta Automatica Sinica, 2023, 49 (7): 1519- 1529. |
| [1] | 费博雯, 包卫东, 刘大千, 朱晓敏. 面向动态目标搜索与打击的空地协同自主任务分配方法[J]. 系统工程与电子技术, 2024, 46(7): 2346-2358. |
| [2] | 卓娅玲, 李响, 左磊, 胡娟. 随机数据丢包情况下组网雷达功率分配算法[J]. 系统工程与电子技术, 2024, 46(6): 1957-1966. |
| [3] | 李阳阳, 罗俊仁, 张万鹏, 项凤涛. 多星协同观测遗传-演进双层任务规划算法[J]. 系统工程与电子技术, 2024, 46(6): 2044-2053. |
| [4] | 尹帅, 余建慧, 宋斌, 郭延宁, 李传江, 吕跃勇. 基于多种群混沌遗传算法的GEO目标服务任务规划[J]. 系统工程与电子技术, 2024, 46(3): 914-921. |
| [5] | 徐建国, 杨志谋, 杨庆, 和钰, 姜江. 联合对海突击背景下电子对抗任务规划研究[J]. 系统工程与电子技术, 2024, 46(11): 3736-3743. |
| [6] | 王建峰, 贾高伟, 郭正, 侯中喜. 多无人机协同任务规划方法研究综述[J]. 系统工程与电子技术, 2024, 46(10): 3437-3450. |
| [7] | 刘玉杰, 李樾, 韩维, 崔凯凯. 基于改进凸优化算法的多机编队突防航迹规划[J]. 系统工程与电子技术, 2023, 45(9): 2819-2830. |
| [8] | 郑多, 韩煜, 鲁天宇, 初治辰. 考虑避碰与任务分配的多飞行器协同制导技术[J]. 系统工程与电子技术, 2023, 45(9): 2873-2883. |
| [9] | 李兵, 刘正敏, 赵新路. 不确定环境下巡飞弹群动态资源管理[J]. 系统工程与电子技术, 2023, 45(8): 2318-2324. |
| [10] | 陈子豪, 李娟, 刘畅, 李杰, 刘笑宇. 时间约束下对地面目标协同攻击任务规划方法[J]. 系统工程与电子技术, 2023, 45(8): 2353-2360. |
| [11] | 钱寒雨, 田晓曼, 肖冰, 曹璐, 王锐, 吴西伟. 分布式卫星集群博弈任务均衡分配方法[J]. 系统工程与电子技术, 2023, 45(6): 1797-1804. |
| [12] | 马维宁, 胡起伟, 曹文斌, 贾希胜. 考虑维修任务分配的装备选择性维修决策优化[J]. 系统工程与电子技术, 2023, 45(6): 1902-1910. |
| [13] | 文启翟, 康志宇, 卫国宁, 贺彦博, 吴斌, 周睿逸. 子母型航天器抵近观测任务流程规划方法研究[J]. 系统工程与电子技术, 2023, 45(12): 3941-3948. |
| [14] | 钟泽南, 权申明, 晁涛, 王松艳, 杨明. 一种空间碎片主动清除任务规划方法[J]. 系统工程与电子技术, 2023, 45(12): 3958-3966. |
| [15] | 张鸿运, 王磊, 张旭, 丁宇, 吕琛, 王昕炜. 考虑子系统执行能力的多无人机协同任务规划[J]. 系统工程与电子技术, 2023, 45(1): 127-138. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||