
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (9): 2873-2883.doi: 10.12305/j.issn.1001-506X.2023.09.27
郑多1, 韩煜1,*, 鲁天宇2, 初治辰1
收稿日期:2022-09-06
出版日期:2023-08-30
发布日期:2023-09-05
通讯作者:
韩煜
作者简介:郑多(1987—), 男, 副研究员, 博士, 主要研究方向为飞行器制导与控制、多机智能协同与博弈对抗技术基金资助:Duo ZHENG1, Yu HAN1,*, Tianyu LU2, Zhichen CHU1
Received:2022-09-06
Online:2023-08-30
Published:2023-09-05
Contact:
Yu HAN
摘要:
集群协同打击可以提升飞行器整体作战效能, 然而集群内部碰撞会引起自损, 降低整体作战效能。针对集群协同打击过程目标分配不合理导致的碰撞问题, 基于协同打击移动目标的场景, 建立了多飞行器碰撞问题的数学模型, 揭示了分布式架构集群协同运动的规律。进一步, 考虑飞行器的安全区域约束, 基于总路径最短的目标分配方法, 引入考虑时空避碰的目标评价规则, 提出了兼顾避碰与协同效果的任务分配方法, 并与反应式避碰策略相结合, 极大地提高了集群协同飞行的安全性。仿真结果表明, 研究提出的考虑时空避碰约束的任务分配方法能够有效减小碰撞概率, 在保证协同打击效果的同时确保飞行安全, 具有较强的工程应用价值。
中图分类号:
郑多, 韩煜, 鲁天宇, 初治辰. 考虑避碰与任务分配的多飞行器协同制导技术[J]. 系统工程与电子技术, 2023, 45(9): 2873-2883.
Duo ZHENG, Yu HAN, Tianyu LU, Zhichen CHU. Multi aircraft cooperative guidance technology considering collision avoidance constraint task allocation[J]. Systems Engineering and Electronics, 2023, 45(9): 2873-2883.
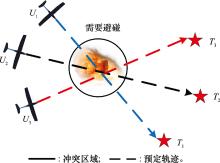
图1
协同避碰场景"


图2
两架UAV避碰过程"


图3
机动角度解算"

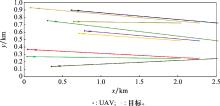
图4
总路径最短的任务分配结果"


图5
考虑总路程的任务分配"


图6
一维条件下第一种分配方案"


图7
一维条件下第二种分配方案"

表1
UAV与三角形编队目标初始位置"
| UAV id | UAV位置/m | 目标id | 目标位置/m | UAV id | UAV位置/m | 目标id | 目标位置/m | |
| UAV1 | [812, 534] | T1 | [6 660, 900] | UAV19 | [597, 374] | T19 | [7 699, 1 020] | |
| UAV2 | [1 287, 1 641] | T2 | [6 868, 780] | UAV20 | [626, 319] | T20 | [7 699, 1 260] | |
| UAV3 | [507, 1 416] | T3 | [6 868, 1 020] | UAV21 | [1 591, 270] | T21 | [7 699, 1 500] | |
| UAV4 | [248, 1 606] | T4 | [7 076, 660] | UAV22 | [1 674, 818] | T22 | [7 907, 180] | |
| UAV5 | [249, 1 159] | T5 | [7 076, 900] | UAV23 | [85, 716] | T23 | [7 907, 420] | |
| UAV6 | [659, 1 552] | T6 | [7 076, 1 140] | UAV24 | [1 325, 1 530] | T24 | [7 907, 660] | |
| UAV7 | [907, 981] | T7 | [7 284, 540] | UAV25 | [981, 1 335] | T25 | [7 907, 900] | |
| UAV8 | [1 579, 736] | T8 | [7 284, 780] | UAV26 | [1 609, 199] | T26 | [7 907, 1 140] | |
| UAV9 | [809, 1 834] | T9 | [7 284, 1 020] | UAV27 | [547, 183] | T27 | [7 907, 1 380] | |
| UAV10 | [76, 1 851] | T10 | [7 284, 1 260] | UAV28 | [352, 1 396] | T28 | [7 907, 1 620] | |
| UAV11 | [341, 1 301] | T11 | [7 491, 420] | UAV29 | [1 048, 227] | T29 | [8 115, 60] | |
| UAV12 | [1 056, 1 315] | T12 | [7 491, 660] | UAV30 | [1 661, 1 541] | T30 | [8 115, 300] | |
| UAV13 | [650, 1 217] | T13 | [7 491, 900] | UAV31 | [515, 1 079] | T31 | [8 115, 540] | |
| UAV14 | [1 460, 135] | T14 | [7 491, 1 140] | UAV32 | [1 773, 1 388] | T32 | [8 115, 780] | |
| UAV15 | [151, 1 855] | T15 | [7 491, 1 380] | UAV33 | [1 510, 880] | T33 | [8 115, 1 020] | |
| UAV16 | [1 172, 516] | T16 | [7 699, 300] | UAV34 | [847, 1 109] | T34 | [8 115, 1 260] | |
| UAV17 | [726, 320] | T17 | [7 699, 540] | UAV35 | [907, 1 264] | T35 | [8 115, 1 500] | |
| UAV18 | [483, 564] | T18 | [7 699, 780] | UAV36 | [856, 752] | T36 | [8 115, 1 740] |
表2
三角形编队移动目标任务分配结果"
| UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | |||||
| UAV1 | T12 | UAV7 | T25 | UAV13 | T9 | UAV19 | T7 | UAV25 | T14 | UAV31 | T5 | |||||
| UAV2 | T35 | UAV8 | T24 | UAV14 | T29 | UAV20 | T11 | UAV26 | T22 | UAV32 | T26 | |||||
| UAV3 | T10 | UAV9 | T28 | UAV15 | T36 | UAV21 | T23 | UAV27 | T16 | UAV33 | T18 | |||||
| UAV4 | T15 | UAV10 | T21 | UAV16 | T31 | UAV22 | T32 | UAV28 | T6 | UAV34 | T13 | |||||
| UAV5 | T1 | UAV11 | T3 | UAV17 | T17 | UAV23 | T2 | UAV29 | T30 | UAV35 | T19 | |||||
| UAV6 | T27 | UAV12 | T33 | UAV18 | T4 | UAV24 | T20 | UAV30 | T34 | UAV36 | T8 |
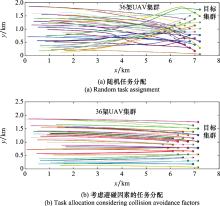
图8
飞行器集群协同打击三角形编队移动目标飞行轨迹"


图9
打击三角形编队移动目标时飞行器间最短距离对比"
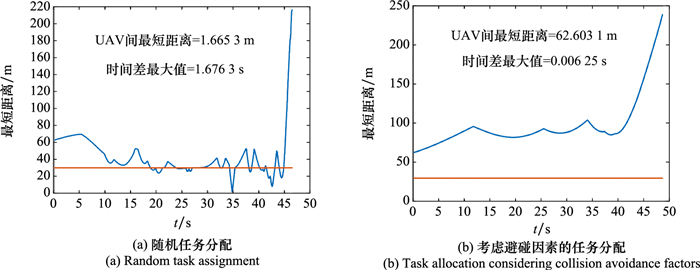
表3
UAV与随机初始位置移动目标的初始位置"
| UAV id | UAV位置/m | 目标id | 目标位置/m | UAV id | UAV位置/m | 目标id | 目标位置/m | |
| UAV1 | [980, 1 265] | T1 | [6 860, 833] | UAV19 | [437, 896] | T19 | [6 944, 1 300] | |
| UAV2 | [979, 1 398] | T2 | [7 848, 1 586] | UAV20 | [1 238, 747] | T20 | [6 650, 1 227] | |
| UAV3 | [940, 1 889] | T3 | [7 922, 673] | UAV21 | [1 325, 810] | T21 | [7 690, 1 414] | |
| UAV4 | [394, 290] | T4 | [7 461, 262] | UAV22 | [1 230, 1 367] | T22 | [8 171, 1 144] | |
| UAV5 | [197, 214] | T5 | [6 701, 345] | UAV23 | [796, 135] | T23 | [6 531, 318] | |
| UAV6 | [728, 907] | T6 | [7 722, 991] | UAV24 | [596, 864] | T24 | [8 053, 972] | |
| UAV7 | [658, 1 474] | T7 | [6 841, 991] | UAV25 | [486, 455] | T25 | [8 021, 477] | |
| UAV8 | [1 130, 1 490] | T8 | [6 766, 199] | UAV26 | [1 479, 874] | T26 | [7 494, 1 234] | |
| UAV9 | [1 679, 1 851] | T9 | [8 031, 1 109] | UAV27 | [1 598, 804] | T27 | [6 558, 1 206] | |
| UAV10 | [346, 350] | T10 | [8 173, 1 354] | UAV28 | [1 455, 1 459] | T28 | [7 152, 189] | |
| UAV11 | [1 253, 269] | T11 | [7 549, 1 568] | UAV29 | [679, 489] | T29 | [7 381, 447] | |
| UAV12 | [946, 1 055] | T12 | [8 082, 1 880] | UAV30 | [1 423, 1 809] | T30 | [6 722, 470] | |
| UAV13 | [1 550, 973] | T13 | [6 501, 1 658] | UAV31 | [590, 1 308] | T31 | [7 007, 1 069] | |
| UAV14 | [708, 1 309] | T14 | [7 603, 1 882] | UAV32 | [790, 1 600] | T32 | [7 464, 901] | |
| UAV15 | [1 334, 1 036] | T15 | [7 450, 963] | UAV33 | [1 384, 401] | T33 | [6 723, 983] | |
| UAV16 | [626, 370] | T16 | [7 942, 510] | UAV34 | [1 552, 1 882] | T34 | [8 035, 1 673] | |
| UAV17 | [1 055, 572] | T17 | [7 397, 1 722] | UAV35 | [926, 1 692] | T35 | [6 987, 475] | |
| UAV18 | [80, 1 459] | T18 | [7 830, 1 155] | UAV36 | [1 058, 379] | T36 | [7 251, 471] |
表4
打击三角形编队移动目标任务分配结果"
| UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | UAV id | 目标id | |||||
| UAV1 | T22 | UAV7 | T21 | UAV13 | T6 | UAV19 | T33 | UAV25 | T30 | UAV31 | T27 | |||||
| UAV2 | T20 | UAV8 | T2 | UAV14 | T18 | UAV20 | T3 | UAV26 | T24 | UAV32 | T11 | |||||
| UAV3 | T14 | UAV9 | T17 | UAV15 | T9 | UAV21 | T1 | UAV27 | T32 | UAV33 | T25 | |||||
| UAV4 | T23 | UAV10 | T5 | UAV16 | T35 | UAV22 | T26 | UAV28 | T10 | UAV34 | T12 | |||||
| UAV5 | T8 | UAV11 | T4 | UAV17 | T16 | UAV23 | T28 | UAV29 | T36 | UAV35 | T13 | |||||
| UAV6 | T7 | UAV12 | T31 | UAV18 | T19 | UAV24 | T15 | UAV30 | T34 | UAV36 | T29 |

图10
飞行器集群协同打击随机起始位置移动目标飞行轨迹"


图11
打击随机起始位置的移动目标时飞行器间最短距离对比"

表5
不同条件下的1 000次仿真统计结果"
| 情况分类 | 编队移动目标数量 | 随机起始位置移动目标数量 | ||||||
| N=10 | N=21 | N=36 | N=10 | N=21 | N=36 | |||
| 只有避碰过程 | 无碰撞概率/% | 79.9 | 27.7 | 8.2 | 64.1 | 12.2 | 1.9 | |
| 机间最短距离均值/m | 39.0 | 20.3 | 14.6 | 28.0 | 10.9 | 8.7 | ||
| 冲突时刻概率P/% | 43.0 | 68.4 | 91.3 | 49.2 | 73.8 | 87.2 | ||
| 避碰+任务分配 | 无碰撞概率/% | 99.8 | 98.1 | 76.5 | 99.9 | 98.5 | 75.6 | |
| 机间最短距离均值/m | 87.0 | 76.6 | 46.0 | 85.3 | 73.1 | 47.5 | ||
| 冲突时刻概率P/% | 0.4 | 0.9 | 6.5 | 0.1 | 0.7 | 5.0 | ||
| 1 |
CHEN W F , CHEN J Y , SHAO Z J , et al. Three-dimensional aircraft conflict resolution based on smoothing methods[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (7): 1481- 1490.
doi: 10.2514/1.G001726 |
| 2 | JEREMY O . A space-discretized mixed-integer linear model for air-conflict resolution with speed and heading maneuvers[J]. Computers & Operations Research, 2015, 58 (6): 75- 86. |
| 3 | HILL J C, ARCHIBALD J K, STIRLING W C R L. A multi-agent system architecture for distributed air traffic control[C]//Proc. of the AIAA Guidance, Navigation, and Control Confe-rence, 2005. |
| 4 |
ARCHIBALD J K , HILL J C , JEPSEN N A , et al. A satisficing approach to aircraft conflict resolution[J]. IEEE Trans. on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2008, 38 (4): 510- 521.
doi: 10.1109/TSMCC.2008.919162 |
| 5 | BREITENMOSER A , MARTINOLI A . On combining multi-robot coverage and reciprocal collision avoidance[J]. Distributed Autonomous Robotic Systems, 2016, 112, 49- 64. |
| 6 |
ALONSO-AYUSO A , ESCUDERO L F , MARTIN-CAMPO F J . Collision avoidance in air traffic management: a mixed-integer linear optimization approach[J]. IEEE Trans. on Intelligent Transportation Systems, 2011, 12 (1): 47- 57.
doi: 10.1109/TITS.2010.2061971 |
| 7 | ALONSO-AYUSO A , ESCUDERO L F , MARTIN-CAMPO F J . On modeling the air traffic control coordination in the collision avoidance problem by mixed integer linear optimization[J]. Annals of Operations Research, 2014, 222 (11): 89- 105. |
| 8 | ZHU X M , YI J J , DING H K , et al. Velocity obstacle based on vertical ellipse for multi-robot collision avoidance[J]. Journal of Intelligent & Robotic Systems, 2020, 99, 183- 208. |
| 9 |
杨秀霞, 张毅, 周硙硙, 等. 基于空间障碍球冠的UAV保角映射避碰决策[J]. 华中科技大学学报(自然科学版), 2019, 47 (2): 127- 132.
doi: 10.13245/j.hust.190223 |
|
YANG X X , ZHANG Y , ZHOU W W , et al. Spatial optimal collision avoidance decision for UAV based on spatial obstacle spherical cap[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2019, 47 (2): 127- 132.
doi: 10.13245/j.hust.190223 |
|
| 10 | 杨秀霞, 周硙硙, 张毅. 基于速度障碍圆弧法的UAV自主避障规划研究[J]. 系统工程与电子技术, 2017, 39 (1): 168- 176. |
| YANG X X , ZHOU W W , ZHANG Y . Automatic obstacle avoidance planning for UAV based on velocity obstacle arc method[J]. Journal of Systems Engineering and Electronics, 2017, 39 (1): 168- 176. | |
| 11 | 杨健. 无人机集群系统空域冲突消解方法研究[D]. 长沙: 国防科学技术大学, 2016: 101-123. |
| YANG J. Study on the airspace conflict resolution problem of unmanned aerial vehicle swarm systems[D]. Changsha: National University of Defense Technology, 2016: 101-123. | |
| 12 |
赵毓, 郭继峰, 郑红星, 等. 基于强化学习的多无人机避碰计算制导方法[J]. 导航定位与授时, 2021, 8 (1): 31- 40.
doi: 10.19306/j.cnki.2095-8110.2021.01.004 |
|
ZHAO Y , GUO J F , ZHENG H X , et al. A rein-forcement learning based computational guidance approach for UAVs collision avoid-ance[J]. Navigation Positioning and Timing, 2021, 8 (1): 31- 40.
doi: 10.19306/j.cnki.2095-8110.2021.01.004 |
|
| 13 | LIN J S, CHIU H T, GAU R H. Decentralized planning-assisted deep reinforcement learning for collision and obstacle avoi-dance in UAV networks[C]//Proc. of the IEEE 93rd Vehicular Technology Conference, 2021. |
| 14 | CHOI D, CHHABRA A, KIM D. Collision avoidance of unmanned aerial vehicles using fuzzy inference system-aided enhanced potential field[C]//Proc. of the AIAA Scitech Forum, 2022: 3-7. |
| 15 |
TONY L A , GHOST D , CHAKRAVARTHY A . Unmanned aerial vehicle mid-air collision detection and resolution using avoidance maps[J]. Journal of Aerospace Information Systems, 2021, 18 (8): 506- 529.
doi: 10.2514/1.I010900 |
| 16 |
周洪喜, 张进, 彭晨远, 等. 基于匈牙利算法的多导弹阵地拦截指派规划[J]. 弹箭与制导学报, 2021, 41 (4): 79- 84.
doi: 10.15892/j.cnki.djzdxb.2021.04.018 |
|
ZHOU H X , ZHANG J , PENG C Y , et al. Interception assignment planning of multiple missile positions based on hungarian algorithm[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2021, 41 (4): 79- 84.
doi: 10.15892/j.cnki.djzdxb.2021.04.018 |
|
| 17 | BELLINGHAM J, TILLERSON M, RICHARDS A, et al. Multi-task allocation and path planning for cooperating UAVs[C]//Proc. of the Cooperative Control: Models, Applications and Algorithms, 2001: 23-41. |
| 18 | EUN Y , BANG H . Cooperative task assignment/path planning of multiple unmanned aerial vehicles using genetic algorithm[J]. Journal of Aircraft, 2012, 46 (1): 338- 343. |
| 19 | ZUO Y, PENG Z H and LIU X. Task allocation of multiple UAVs and targets using improved genetic algorithm[C]//Proc. of the 2nd International Conference on Intelligent Control and Information Processing, 2011: 1030-1034. |
| 20 | WEN Y L, LIU L, WANG Z, et al. Multi-UCAVs targets assignment using opposition-based genetic algorithm[C]//Proc. of the 27th Chinese Control and Decision Conference, 2015: 6026-6030. |
| 21 |
DORIGO M , GAMBARDELLA L M . Ant colony system: a cooperative learning approach to the traveling salesman problem[J]. IEEE Trans. on Evolutionary Computation, 1997, 1 (1): 53- 66.
doi: 10.1109/4235.585892 |
| 22 |
CHEN L Z , LIU W L , ZHONG J H . An efficient multi-objective ant colony optimization for task allocation of heterogeneous unmanned aerial vehicles[J]. Journal of Computational Science, 2022, 58, 101545.
doi: 10.1016/j.jocs.2021.101545 |
| 23 | 谢永杰, 多平台防空导弹任务分配及协同制导方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2019. |
| XIE Y J. Research on task assignment and cooperative guidance method of multi platform air defense missile[D]. Harbin: Harbin Institute of Technology, 2019. | |
| 24 |
李文广, 李建增, 胡永江, 等. 基于集中一体化遗传算法的协同航迹规划方法[J]. 火力与指挥控制, 2021, 46 (6): 27- 31.
doi: 10.3969/j.issn.1002-0640.2021.06.005 |
|
LI W G , LI J Z , HU Y J , et al. Cooperative route planning based on centralized integrated genetic algorithm[J]. Fire Control & Command Control, 2021, 46 (6): 27- 31.
doi: 10.3969/j.issn.1002-0640.2021.06.005 |
|
| 25 |
张小孟, 胡永江, 李永科, 等. 一种无人机分层族群任务规划方法[J]. 兵器装备工程学报, 2022, 43 (5): 226- 231.
doi: 10.11809/bqzbgcxb2022.05.036 |
|
ZHANG X M , HU Y J , LI Y K , et al. Hierarchical ethnic mission planning method for UAV[J]. Journal of Ordnance Equipment Engineering, 2022, 43 (5): 226- 231.
doi: 10.11809/bqzbgcxb2022.05.036 |
|
| 26 | 代琪, 何兵, 李明, 等. 基于强化学习的多无人机任务分配方法研究[C]//无人系统高峰论坛, 2021. |
| DAI Q, HE B, LI M, et al. Research on multi UAV task assignment method based on reinforcement learning[C]//Proc. of the Unmanned System Summit Forum, 2021. | |
| 27 |
FEO-FLUSHING E , GAMBARDELLA L M , CARO G . Spatially-distributed missions with heterogeneous multi-robot teams[J]. IEEE Access, 2021, 9, 67327- 67348.
doi: 10.1109/ACCESS.2021.3076919 |
| 28 |
SMITH R G . The contract net protocol: high-level communication and control in a distributed problem solver[J]. IEEE Trans. on Computers, 1980, C-29 (12): 1104- 1113.
doi: 10.1109/TC.1980.1675516 |
| 29 |
谷旭平, 唐大全. 基于细菌觅食算法的多异构无人机任务规划[J]. 系统工程与电子技术, 2021, 43 (11): 3312- 3320.
doi: 10.12305/j.issn.1001-506X.2021.11.32 |
|
GU X P , TANG D Q . Multi-heterogeneous UAV task planning based on baterial foraging algorithm[J]. Systems Engineering and Electronics, 2021, 43 (11): 3312- 3320.
doi: 10.12305/j.issn.1001-506X.2021.11.32 |
|
| 30 | PALMER D, KIRSCHENBAUM M, MURTON J, et al. Decentralized cooperative auction for multiple agent task allocation using synchronized random number generators[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2003, 1963-1968. |
| [1] | 刘玉杰, 李樾, 韩维, 崔凯凯. 基于改进凸优化算法的多机编队突防航迹规划[J]. 系统工程与电子技术, 2023, 45(9): 2819-2830. |
| [2] | 李兵, 刘正敏, 赵新路. 不确定环境下巡飞弹群动态资源管理[J]. 系统工程与电子技术, 2023, 45(8): 2318-2324. |
| [3] | 陈子豪, 李娟, 刘畅, 李杰, 刘笑宇. 时间约束下对地面目标协同攻击任务规划方法[J]. 系统工程与电子技术, 2023, 45(8): 2353-2360. |
| [4] | 游骏, 张科, 韩治国, 蔡天星, 张程. 带视线角约束的三维超螺旋滑模协同制导律[J]. 系统工程与电子技术, 2023, 45(7): 2138-2149. |
| [5] | 钱寒雨, 田晓曼, 肖冰, 曹璐, 王锐, 吴西伟. 分布式卫星集群博弈任务均衡分配方法[J]. 系统工程与电子技术, 2023, 45(6): 1797-1804. |
| [6] | 马维宁, 胡起伟, 曹文斌, 贾希胜. 考虑维修任务分配的装备选择性维修决策优化[J]. 系统工程与电子技术, 2023, 45(6): 1902-1910. |
| [7] | 张鸿运, 王磊, 张旭, 丁宇, 吕琛, 王昕炜. 考虑子系统执行能力的多无人机协同任务规划[J]. 系统工程与电子技术, 2023, 45(1): 127-138. |
| [8] | 岳程斐, 薛正华, 姚蔚然, 曹喜滨. 基于机群关系特征的多机协同作战任务分配[J]. 系统工程与电子技术, 2022, 44(6): 1897-1906. |
| [9] | 尹洋, 杨全顺, 王征, 刘洋. 通信距离约束下的无人船集群覆盖搜索方法[J]. 系统工程与电子技术, 2022, 44(12): 3821-3828. |
| [10] | 刘钢, 汤俊, 刘陈, 李武. 无人飞行器集群协同行为建模技术综述[J]. 系统工程与电子技术, 2021, 43(8): 2221-2231. |
| [11] | 周晶, 赵晓哲, 许震, 林众, 张晓盼. 基于D-NSGA-Ⅲ算法的无人机群高维多目标任务分配方法[J]. 系统工程与电子技术, 2021, 43(5): 1240-1247. |
| [12] | 李翰, 张洪海, 张连东, 刘皞. 城市区域多物流无人机协同任务分配[J]. 系统工程与电子技术, 2021, 43(12): 3594-3602. |
| [13] | 陈亚东, 陈中文, 王佳楠, 单家元. 基于大气数据传感器的协同制导控制方法[J]. 系统工程与电子技术, 2020, 42(9): 2060-2065. |
| [14] | 杨秀霞, 曹唯一, 张毅. 时间和角度约束下的双圆弧路径规划[J]. 系统工程与电子技术, 2019, 41(8): 1835-1843. |
| [15] | 李桂英, 于志刚, 张扬. 带有角度约束的机动目标拦截协同制导律[J]. 系统工程与电子技术, 2019, 41(3): 626-635. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||