
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (9): 2819-2830.doi: 10.12305/j.issn.1001-506X.2023.09.21
刘玉杰1,2,*, 李樾3, 韩维1, 崔凯凯4
收稿日期:2022-06-21
出版日期:2023-08-30
发布日期:2023-09-05
通讯作者:
刘玉杰
作者简介:刘玉杰 (1983—), 男, 高级工程师, 博士, 主要研究方向为航空飞行、航空保障、航空心理、空域管理、航空人才选拔培养基金资助:Yujie LIU1,2,*, Yue LI3, Wei HAN1, Kaikai CUI4
Received:2022-06-21
Online:2023-08-30
Published:2023-09-05
Contact:
Yujie LIU
摘要:
为更好地发挥多机编队在低空突防作战中的优势, 对已有的凸优化算法进行改进, 提出一种多机编队低空突防航迹规划方法。首先, 根据低空突防任务特点进行问题建模, 包含多机编队航迹规划模型、障碍物模型以及任务分配评估模型。其次, 提出基于匈牙利算法的集群任务分组概念, 设计更符合战场需求和运动学规律的预规划航迹。之后, 考虑新类型的外部障碍物和不同任务小组间的组间避障, 通过对约束进行合理的近似与凸优化, 实现多机安全飞行。最后, 通过对比仿真, 验证所提改进方法的可行性和有效性。结果表明, 改进后的航迹规划算法能实现对低空突防任务的合理分配, 求解效率和成功率均有所提高, 对新加入的障碍有良好的避障效果。
中图分类号:
刘玉杰, 李樾, 韩维, 崔凯凯. 基于改进凸优化算法的多机编队突防航迹规划[J]. 系统工程与电子技术, 2023, 45(9): 2819-2830.
Yujie LIU, Yue LI, Wei HAN, Kaikai CUI. Trajectory planning for penetration of multi-aircraft for mation based on improved convex optimization algorithm[J]. Systems Engineering and Electronics, 2023, 45(9): 2819-2830.
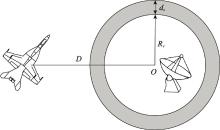
图1
飞机与雷达位置关系图"
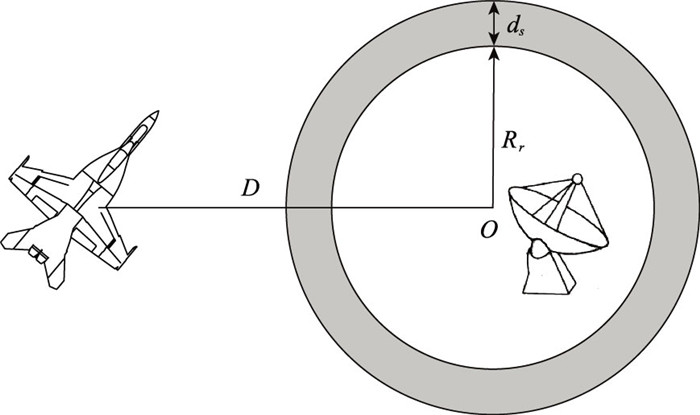

图2
敌我相对态势指标中各物理量示意图"
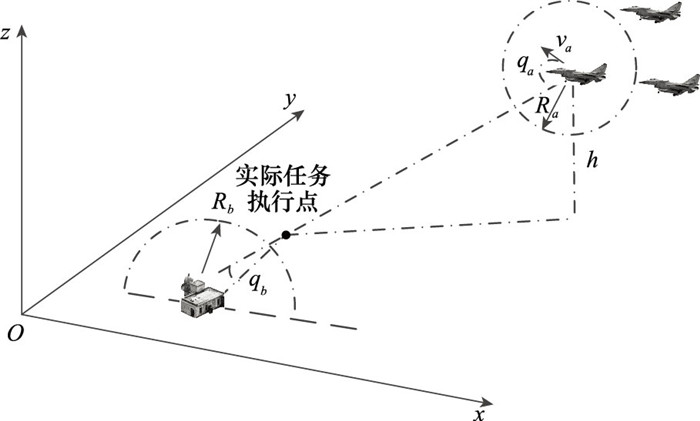
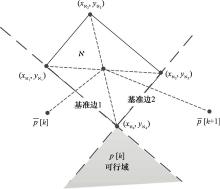
图3
多边形障碍的凸化可行域"
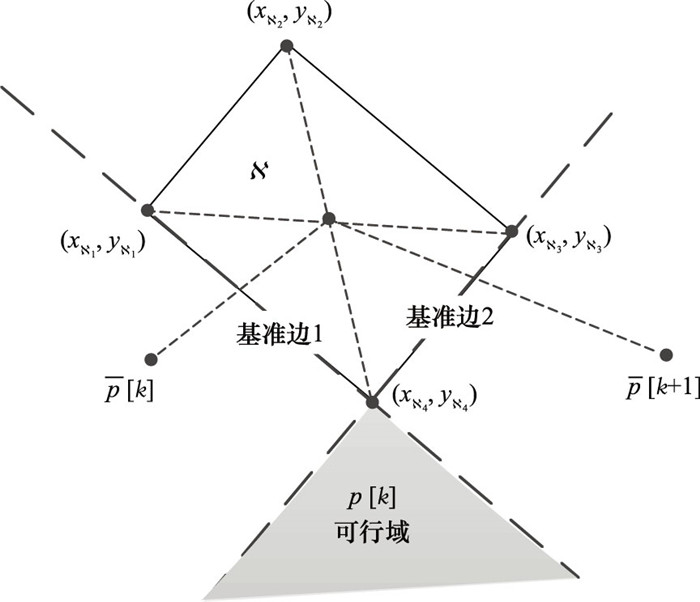
图4
组间避障示意图"
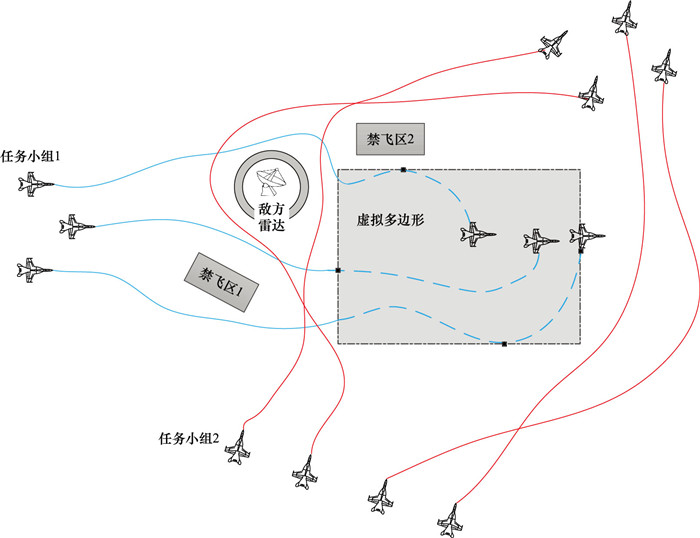
表1
各任务小组的状态量"
| 物理量 | 任务小组1 | 任务小组2 | 任务小组3 |
| s(t0) | (22 000, 20 000, 5 000, 600, π/6, 0) | (40 000, 5 000, 6 000, 600, π/2, 0) | (1 000, 1 000, 5 000, 600, π/4, 0) |
| (18 000, 20 000, 5 000, 600, π/6, 0) | (38 000, 5 000, 6 000, 600, π/2, 0) | (1 000, 0, 5 000, 600, π/4, 0) | |
| (20 000, 22 000, 5 000, 600, π/6, 0) | (36 000, 5 000, 6 000, 600, π/2, 0) | (0, 0, 5 000, 600, π/4, 0) | |
| (20 000, 18 000, 5 000, 600, π/6, 0) | (42 000, 5 000, 6 000, 600, π/2, 0) | (2 000, 0, 5 000, 600, π/4, 0) | |
| 初始队形 | 菱形 | 横向平行队形 | 菱形 |
| smin | (-∞, -∞, 1 000, 200, -∞, -π/9) | (-∞, -∞, 1 000, 200, -∞, -π/9) | (-∞, -∞, 1 000, 200, -∞, -π/9) |
| smax | (∞, ∞, 10 000, 1 000, -∞, π/9) | (∞, ∞, 10 000, 1 000, -∞, π/9) | (∞, ∞, 10 000, 1 000, -∞, π/9) |
| umin | (-0.4, -4, 0.8) | (-0.6, -8, 0.8) | (-0.2, -2, 0.8) |
| umax | (0.4, 4, 1.2) | (0.6, 8, 1.2) | (0.2, 0.2, 1.2) |
| (0, 0, 0) | (0, 0, 0) | (0, 0, 0) | |
| (0.1, 1, 0.1) | (0.15, 2, 0.1) | (0.05, 0.5, 0.1) | |
| Ra | 3×104 | 6×104 | 3×104 |
| Rc | 5×104 | 7×104 | 6×104 |
表2
各子任务信息"
| 物理量 | 任务小组1 | 任务小组2 | 任务小组3 |
| 真实位置 | (75 000, 65 000, 0) | (70 000, 62 000, 0) | (40 000, 84 000, 0) |
| 任务执行点 | (74 000, 44 000, 1 500, 600, π/2, 0) | (58 000, 58 000, 1 500, 600, 0, 0) | (40 000, 52 000, 2 000, 600, π/2, 0) |
| s(tf) | (74 000, 44 000, 1 500, 600, π/2, 0) | (58 000, 58 000, 1 500, 600, 0, 0) | (40 000, 52 000, 2 000, 600, π/2, 0) |
| (76 000, 45 000, 1 500, 600, π/2, 0) | (60 000, 62 000, 1 500, 600, 0, 0) | (40 000, 50 000, 2 000, 600, π/2, 0) | |
| (77 000, 44 000, 1 500, 600, π/2, 0) | (58 000, 58 000, 1 500, 600, 0, 0) | (40 000, 54 000, 2 000, 600, π/2, 0) | |
| (74 000, 44 000, 1 500, 600, π/2, 0) | (58 000, 64 000, 1 500, 600, 0, 0) | (40 000, 48 000, 2 000, 600, π/2, 0) | |
| 任务执行点队形 | 楔形 | 楔形 | 一字纵向队形 |
| Rb | 4×104 | 2×104 | 5×104 |
| G | 40 | 100 | 80 |
表3
障碍物模型信息"
| 物理量 | 雷达1 | 雷达2 | 禁飞区1 | 禁飞区2 |
| 中心坐标 | (78 000, 18 000) | (20 000, 10 000) | - | - |
| Rr+ds | 7 000 | 3 000 | - | - |
| 边界坐标 | - | - | (35 000, 20 000) | (30 000, 35 000) |
| (35 000, 25 000) | (30 000, 45 000) | |||
| (45 000, 25 000) | (33 000, 45 000) | |||
| (45 000, 20 000) | (33 000, 35 000) |
表4
优化参数设置"
| 阶段 | 物理量 | 数值 |
| 预规划阶段 | h0 | 2 000 |
| hmax | 10 000 | |
| λ1 | 0.5 | |
| λ2 | -0.5 | |
| 航迹规划阶段 | K | 50 |
| Rmax | 500 | |
| flag | 104 | |
| μin | 0.5 | |
| μeq | 1 | |
| ε1 | (105, 105, 2×103, 100, π, π/6) |
表5
任务小组对子任务的评价值"
| 分组 | 子任务1 | 子任务2 | 子任务3 | ||||||||
| ${\bar T}$ | ${\bar C}$ | ${\bar G}$ | ${\bar T}$ | ${\bar C}$ | ${\bar G}$ | ${\bar T}$ | ${\bar C}$ | ${\bar G}$ | |||
| 任务小组1 | 0.056 | -0.03 | 0.4 | 0.046 | -0.03 | 1 | 0.297 | -0.01 | 0.8 | ||
| 任务小组2 | 0.057 | -0.04 | 0.4 | 0.096 | -0.05 | 1 | 0.080 | -0.03 | 0.8 | ||
| 任务小组3 | 0.051 | -0.02 | 0.4 | 0.051 | -0.01 | 1 | 0.135 | 0.02 | 0.8 | ||
表6
预规划航迹对比表"
| 分组 | 平均求解时间/s | 求解成功率/% | |||
| 实验组 | 对照组 | 实验组 | 对照组 | ||
| 任务小组1 | 16.33 | 17.02 | 100 | 93.33 | |
| 任务小组2 | 12.88 | 12.82 | 100 | 100 | |
| 任务小组3 | 18.26 | 20.76 | 96.67 | 86.67 | |
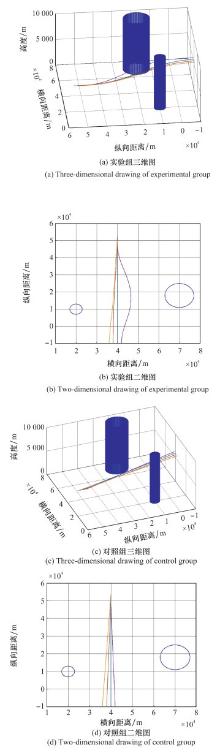
图5
任务小组2预规划航迹"
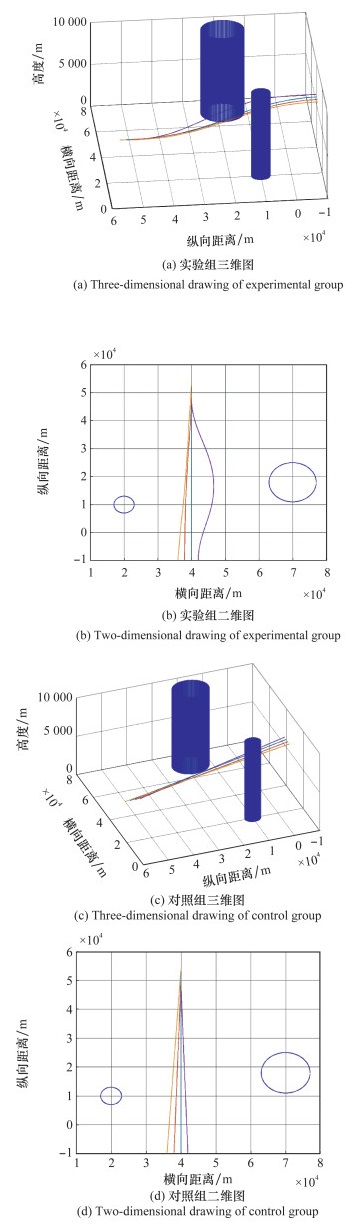
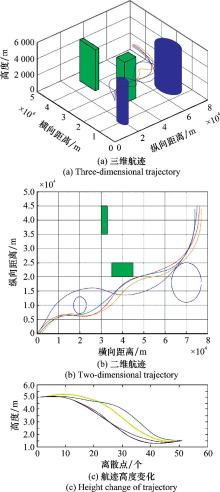
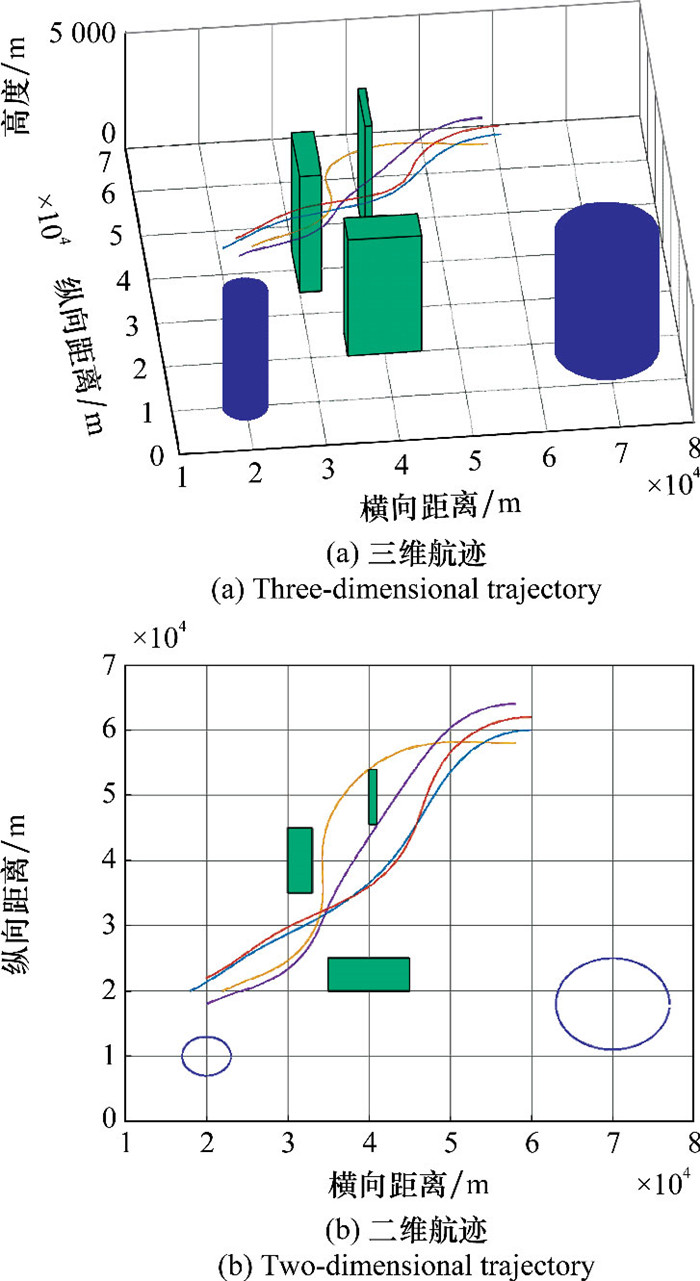
图6
任务小组3执行子任务航迹变化图"
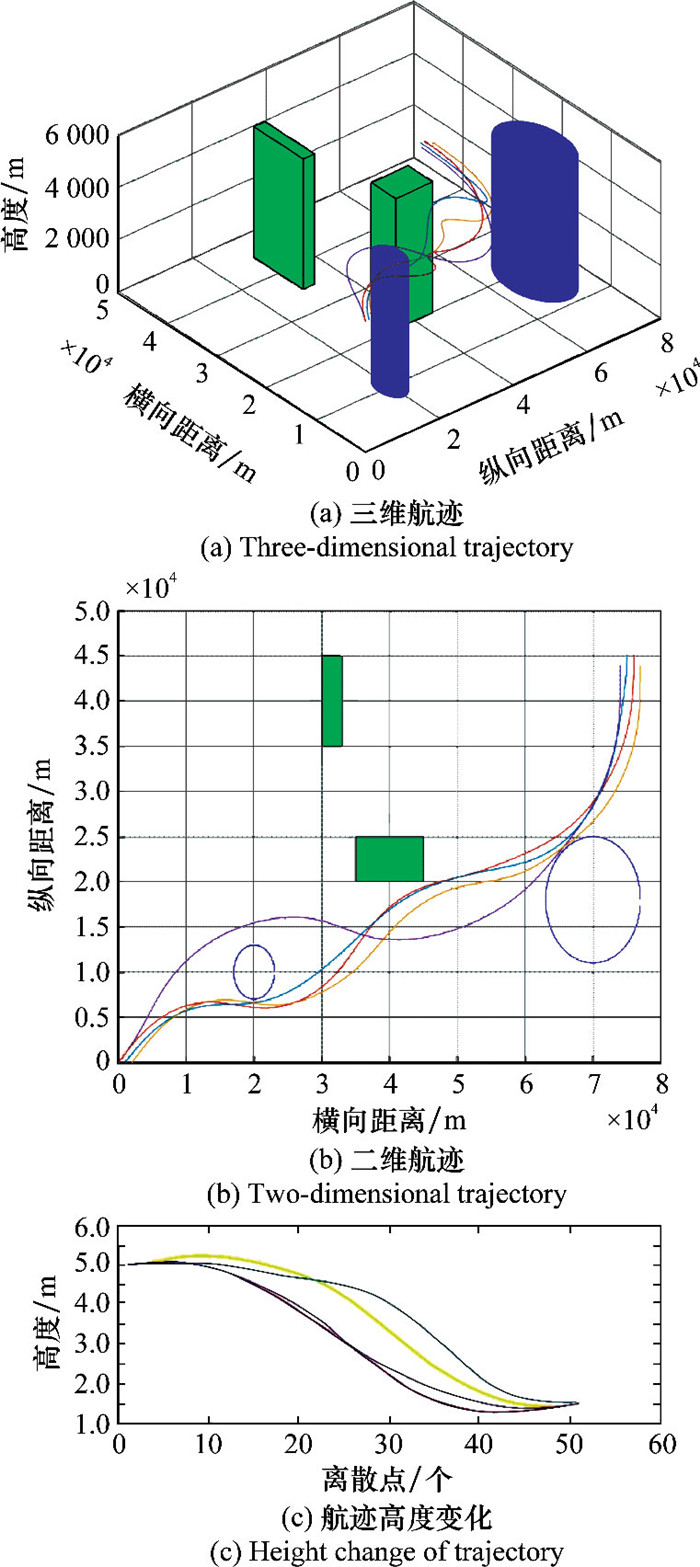
图7
任务小组2航迹对比"
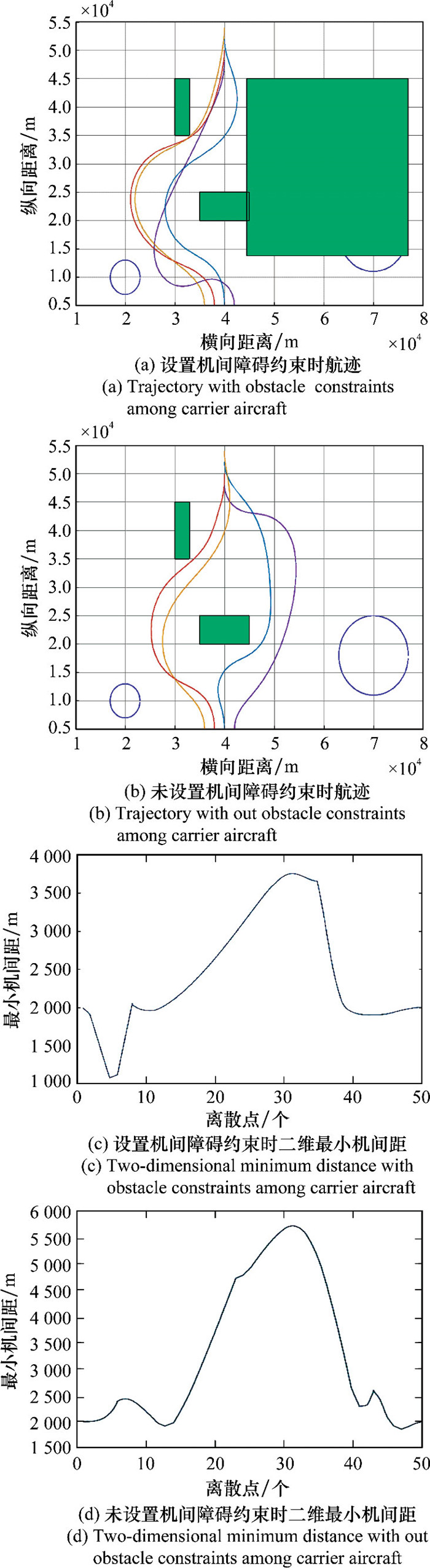

图8
任务小组1执行子任务航迹变化"
| 21 | 李樾, 韩维, 陈清阳, 等. 凸优化算法在有人/无人机协同系统航迹规划中的应用[J]. 宇航学报, 2020, 41 (3): 276- 286. |
| LI Y , HAN W , CHEN Q Y , et al. Application of convex optimization algorithm in trajectory planning of manned/unmanned cooperative system[J]. Journal of Astronautics, 2020, 41 (3): 276- 286. | |
| 22 | LU P , LIU X F . Autonomous trajectory planning for rendezvous and proximity operations by conic optimization[J]. Journal of Gui-dance, Control, and Dynamics, 2013, 36 (2): 375- 389. |
| 23 | SZMUK M, ACKMESE B, BERNING A W, et al. Successive convexification for Fuel-optimal powered landing with aero dynamic drag and non-convex constraints[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2016. |
| 24 | LEWIS L R . Rapid motion planning and autonomous obstacle avoidance for unmanned vehicles[M]. Monterey: Naval Postgraduate School, 2006. |
| 25 | 邵将, 徐扬, 罗德林. 无人机多机协同对抗决策研究[J]. 信息与控制, 2018, 47 (3): 347- 354. |
| SHAO J , XU Y , LUO D L . Cooperative combat decision-making research for multi UAVs[J]. Information and Control, 2018, 47 (3): 347- 354. | |
| 26 | EUN Y , BANG H . Cooperative taskassignment/path planning of multiple unmanned aerial vehicles using genetic algorithm[J]. Journal of Aircraft, 2009, 46 (1): 338- 343. |
| 27 | 杨尚君, 孙永维, 庞宇. 基于改进鱼群算法的多无人机任务分配研究[J]. 计算机仿真, 2015, 32 (1): 69- 72. |
| YANG S J , SUN Y W , PANG Y . Research on multi-UAV cooperative task allocation based on improved fish swarm algorithm[J]. Computer Simulation, 2015, 32 (1): 69- 72. | |
| 28 | RASMUSSEN S J , SHIMA T . Tree search algorithm for assigning cooperating UAVs to multiple tasks[J]. International Journal of Robust and Nonlinear Control, 2008, 18 (2): 135- 153. |
| 1 | 闵昌万. 飞行器航迹规划与轨迹控制研究[D]. 西安: 西北工业大学, 1999. |
| MIN C W. Research of aircraft trajectory planning and trajectory control[D]. Xi'an: Northwestern Polytechnical University, 1998: 24-27. | |
| 2 |
黄鹤, 吴琨, 王会峰, 等. 基于改进飞蛾扑火算法的无人机低空突防路径规划[J]. 中国惯性技术学报, 2021, 29 (2): 256- 263.
doi: 10.13695/j.cnki.12-1222/o3.2021.02.017 |
|
HUANG H , WU K , WANG H F , et al. Path-planning of UAV low altitude penetration based on improved moth-flame optimization[J]. Journal of Chinese Inertial Technology, 2021, 29 (2): 256- 263.
doi: 10.13695/j.cnki.12-1222/o3.2021.02.017 |
|
| 3 | 张志伟, 蒋道刚, 袁坤. 低空突防航线规划研究[J]. 飞行力学, 2019, 37 (4): 62- 67. |
| ZHANG Z W , JIANG D G , YUAN K . Study on low altitude penetration route planning[J]. Flight Dynamics, 2019, 37 (4): 62- 67. | |
| 4 |
RADMANESH M , KUMAR M , GUENTERT P H , et al. Overview of path planning and obstacle avoidance algorithms for UAVs: a comparative study[J]. Unmanned Systems, 2018, 6 (2): 95- 118.
doi: 10.1142/S2301385018400022 |
| 5 | 丁明跃, 郑昌文, 周成平, 等. 无人飞行器航迹规划[M]. 北京: 电子工业出版社, 2009: 6- 15. |
| DING M Y , ZHENG C W , ZHOU C P , et al. Track planning of unmanned aerial vehicle[M]. Beijing: Publishing House of Electronics Industry, 2009: 6- 15. | |
| 6 | 韩尧, 李少华. 基于改进人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2021, 43 (11): 3305- 3311. |
| HAN Y , LI S H . UAV path planning based on improved artificial potential field[J]. Systems Engineering and Electronics, 2021, 43 (11): 3305- 3311. | |
| 7 | BAI W B, WU X D, XIE Y E, et al. A cooperative route planning method for multi-UAVs based-on the fusion of artificial potential field and B-spline interpolation[C]//Proc. of the 37th Chinese Control Conference, 2018: 6733-6738. |
| 8 | FU G D, PENG J, XIN Q B, et al. AUV local path planning based on virtual potential field[C]//Proc. of the IEEE International Conference Mechatronics and Automation, 2005, 4: 1711-1716. |
| 9 |
NIU H L , JI Z , SAVVARIS A , et al. Energy efficient path planning for unmanned surface vehicle in spatially-temporally variant environment[J]. Ocean Engineering, 2020, 196, 106766.
doi: 10.1016/j.oceaneng.2019.106766 |
| 10 | CHEN X, LI G Y, CHEN X M. Path planning and cooperative control for multiple UAVs based on consistency theory and Voronoi diagram[C]//Proc. of the 29th Chinese Control and Decision Conference, 2017: 881-886. |
| 11 | SHEN Z Y, CHENG X M, ZHOU S Y, et al. A dynamic airspace planning framework with ads-b tracks for manned and unmanned aircraft at low-altitude sharing airspace[C]//Proc. of the IEEE/AIAA 36th Digital Avionics Systems Conference, 2017. |
| 12 |
MASHAYEKHI R , IDRIS M , ANISI M , et al. Informed RRT*- connect: an asymptotically optimal single-query path planning method[J]. IEEE Access, 2020, 8, 19842- 19852.
doi: 10.1109/ACCESS.2020.2969316 |
| 13 |
WEN N F , ZHAO L L , SU X H , et al. UAV online path planning algorithm in a low altitude dangerous environment[J]. IEEE/CAA Journal of AutomaticaSinica, 2015, 2 (2): 173- 185.
doi: 10.1109/JAS.2015.7081657 |
| 14 |
LIN Y , SARIPALLI S . Sampling-based path planning for UAV collision avoidance[J]. IEEE Trans.on Intelligent Transportation Systems, 2017, 18 (11): 3179- 3192.
doi: 10.1109/TITS.2017.2673778 |
| 15 |
QIN S T , BADGWELL T A . A survey of industrial model predictive control technology[J]. Control Engineering Practice, 2003, 11 (7): 733- 764.
doi: 10.1016/S0967-0661(02)00186-7 |
| 16 | 王祝, 刘莉, 龙腾, 等. 基于罚函数序列凸规划的多无人机轨迹规划[J]. 航空学报, 2016, 37 (10): 3149- 3158. |
| WANG Z , LIU L , LONG T , et al. Trajectory planning for multi-UAVs using penalty sequential convex programming[J]. Aeronautica et AstronauticaSinica, 2016, 37 (10): 3149- 3158. | |
| 17 | 严冰, 张进, 罗亚中. 面向编队卫星的空间系绳在轨服务[J]. 系统工程与电子技术, 2021, 43 (3): 806- 813. |
| 29 | TANG J , ZHU K J , GUO H X , et al. Using auction-based task allocation scheme for simulation optimization of search and rescue in disaster relief[J]. Simulation Modelling Practice and Theory, 2018, 82, 132- 146. |
| 30 | 张进, 郭浩, 陈统. 基于可适应匈牙利算法的武器-目标分配问题[J]. 兵工学报, 2021, 42 (6): 1339- 1344. |
| ZHANG J , GUO H , CHEN T . Weapon-target assignment based on adaptable Hungarian algorithm[J]. Acta Armamentarii, 2021, 42 (6): 1339- 1344. | |
| 31 | 高阳阳, 余敏建, 杨杰. 多机空战指挥引导不平衡目标分配方法研究[J]. 航空工程进展, 2018, 9 (4): 523- 529. |
| GAO Y Y , YU M J , YANG J . Research on the method of unbalanced target allocation in multi-aircraft air combat command and guidance[J]. Advances in Aeronautical Science and Engineering, 2018, 9 (4): 523- 529. | |
| 32 | 朱宝鎏, 朱荣昌, 熊笑非. 作战飞机效能评估[M]. 北京: 航空工业出版社, 2006: 58- 69. |
| ZHU B L , ZHU R C , XIONG X F . Effectiveness assessment of combat aircraft[M]. Beijing: Aviation Industry Press, 2006: 58- 69. | |
| 17 | YANG B , ZHANG J , LUO Y Z . On-orbit service for formation satellites with space-tether[J]. Systems Engineering and Electronics, 2021, 43 (3): 806- 813. |
| 18 | KUWATA Y , HOW J . Cooperative distributed robust trajectory optimization using receding horizon MILP[J]. IEEE Trans.on System Technology, 2016, 19 (2): 423- 431. |
| 19 | 李牧东, 赵辉, 黄汉桥, 等. 基于TLD模型的UAV三维实时平滑航迹规划[J]. 系统工程与电子技术, 2017, 39 (1): 93- 100. |
| LI M D , ZHAO H , HUANG H Q , et al. 3-D real-time smooth path planning for UAV based on TLD model[J]. Systems Engineering and Electronics, 2017, 39 (1): 93- 100. | |
| 20 | BOYD S , VANDENBERGHE L . Convex Optimization[M]. New York: Cambridge University Press, 2004. |
| [1] | 郑多, 韩煜, 鲁天宇, 初治辰. 考虑避碰与任务分配的多飞行器协同制导技术[J]. 系统工程与电子技术, 2023, 45(9): 2873-2883. |
| [2] | 李兵, 刘正敏, 赵新路. 不确定环境下巡飞弹群动态资源管理[J]. 系统工程与电子技术, 2023, 45(8): 2318-2324. |
| [3] | 陈子豪, 李娟, 刘畅, 李杰, 刘笑宇. 时间约束下对地面目标协同攻击任务规划方法[J]. 系统工程与电子技术, 2023, 45(8): 2353-2360. |
| [4] | 吴立尧, 苏析超, 王垒, 潘子双. 有人/无人机编队队形集结控制研究[J]. 系统工程与电子技术, 2023, 45(7): 2192-2202. |
| [5] | 钱寒雨, 田晓曼, 肖冰, 曹璐, 王锐, 吴西伟. 分布式卫星集群博弈任务均衡分配方法[J]. 系统工程与电子技术, 2023, 45(6): 1797-1804. |
| [6] | 马维宁, 胡起伟, 曹文斌, 贾希胜. 考虑维修任务分配的装备选择性维修决策优化[J]. 系统工程与电子技术, 2023, 45(6): 1902-1910. |
| [7] | 王庆禄, 吴冯国, 郑成辰, 李辉. 基于优化人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(5): 1461-1468. |
| [8] | 李尧尧, 郭超然, 李杨, 赵玉壮. 基于转向与制动协同的无人车辆轨迹跟踪控制[J]. 系统工程与电子技术, 2023, 45(4): 1185-1192. |
| [9] | 张鸿运, 王磊, 张旭, 丁宇, 吕琛, 王昕炜. 考虑子系统执行能力的多无人机协同任务规划[J]. 系统工程与电子技术, 2023, 45(1): 127-138. |
| [10] | 任智, 张栋, 唐硕. 基于强化学习的改进三维A*算法在线航迹规划[J]. 系统工程与电子技术, 2023, 45(1): 193-201. |
| [11] | 岳程斐, 薛正华, 姚蔚然, 曹喜滨. 基于机群关系特征的多机协同作战任务分配[J]. 系统工程与电子技术, 2022, 44(6): 1897-1906. |
| [12] | 陈都, 孟秀云. 基于自适应郊狼算法的无人机离线航迹规划[J]. 系统工程与电子技术, 2022, 44(2): 603-611. |
| [13] | 尹洋, 杨全顺, 王征, 刘洋. 通信距离约束下的无人船集群覆盖搜索方法[J]. 系统工程与电子技术, 2022, 44(12): 3821-3828. |
| [14] | 汪瀚洋, 陈亮, 徐海, 白景波. 基于MOEA/D-ARMS的无人机在线航迹规划[J]. 系统工程与电子技术, 2022, 44(11): 3505-3514. |
| [15] | 黄加佳, 雷菁, 黄英. 无码率码在无线传感器网络中的应用研究[J]. 系统工程与电子技术, 2022, 44(10): 3228-3234. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||