
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (5): 1728-1737.doi: 10.12305/j.issn.1001-506X.2026.05.28
王婕, 孙笑轩, 李擎, 卢昊
收稿日期:2025-04-08
出版日期:2026-05-27
发布日期:2026-05-27
通讯作者:
李擎
作者简介:王 婕(1986—),女,副教授,博士,主要研究方向为飞行器制导控制与仿真、智能控制理论及应用基金资助:Jie WANG, Xiaoxuan SUN, Qing LI, Hao LU
Received:2025-04-08
Online:2026-05-27
Published:2026-05-27
Contact:
Qing LI
摘要:
针对带有执行器故障、信号量化的六自由度高超声速飞行器协同控制问题,设计一种预定时间量化容错控制器。首先,在时间尺度上将六自由度高超声速飞行器模型分解为位置子系统、速度子系统和姿态子系统,结合量化模型和故障模型建立面向控制的模型。其次,分别对3个子系统设计预定时间控制器,保证高超声速飞行器在预设定的时间内完成编队飞行,并设计一种自适应跟踪方法来补偿故障和信号量化带来的影响。最后,基于Lyapunov理论严格证明了闭环系统的稳定性,通过仿真验证了控制器的有效性。
中图分类号:
王婕, 孙笑轩, 李擎, 卢昊. 高超声速飞行器预定时间量化容错协同控制[J]. 系统工程与电子技术, 2026, 48(5): 1728-1737.
Jie WANG, Xiaoxuan SUN, Qing LI, Hao LU. Pre-defined time quantization fault-tolerant cooperative control for hypersonic vehicle[J]. Systems Engineering and Electronics, 2026, 48(5): 1728-1737.

图1
高超声速飞行器编队飞行控制结构图"
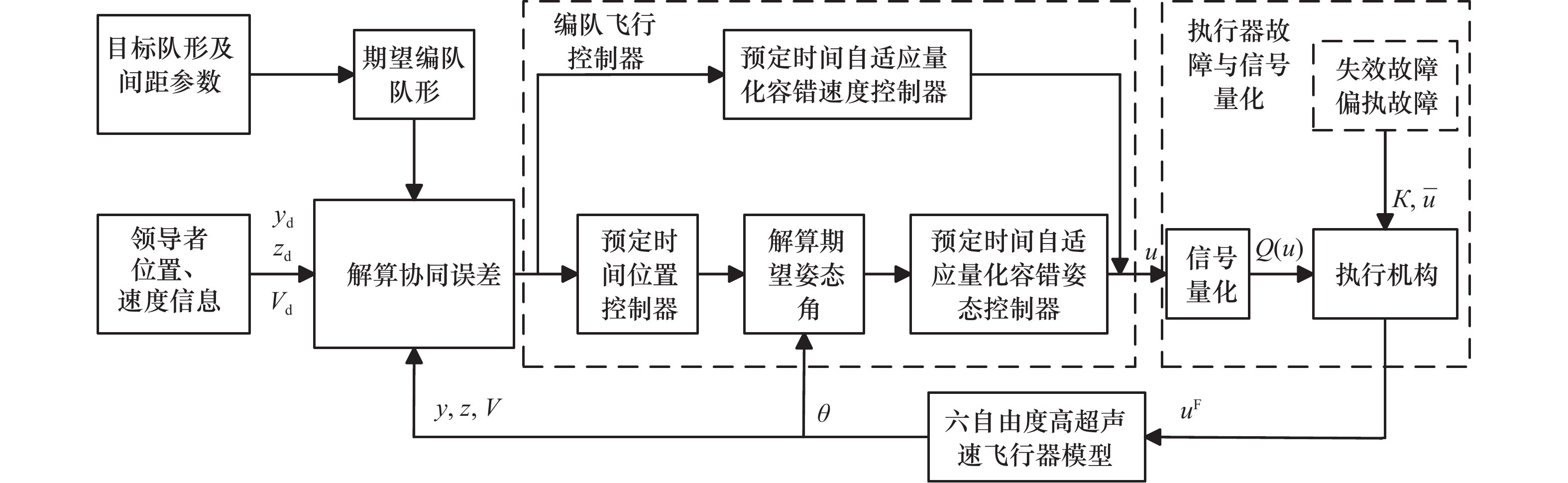
图2
系统通讯拓扑"
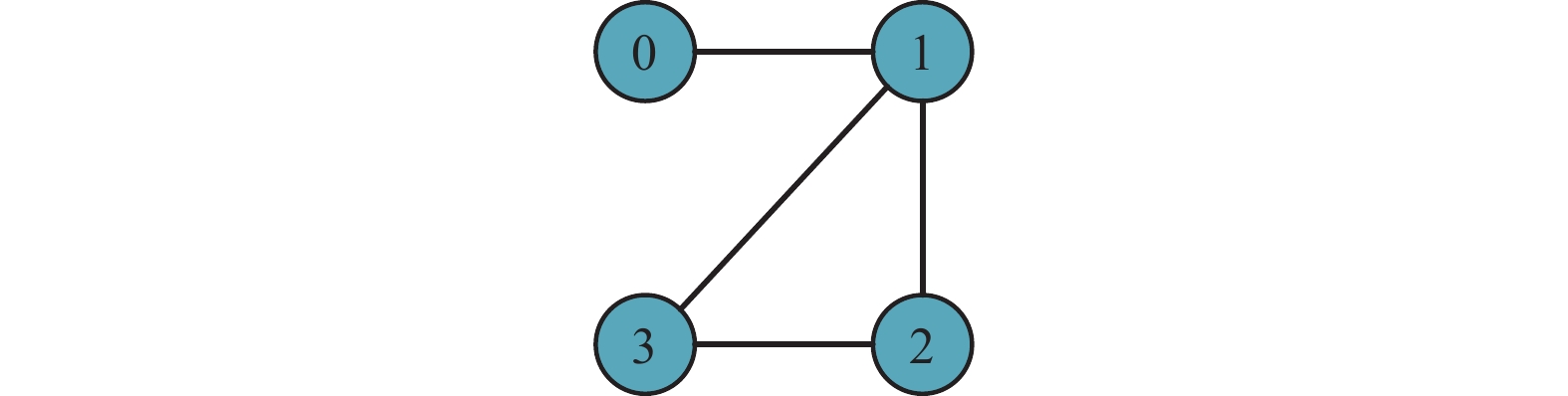
表1
高超声速飞行器初始状态"
| 参数 | 飞行器1 | 飞行器2 | 飞行器3 |
| 0 | − | ||
| 速度/(m·s−1) | 1820 | ||
| 攻角/( | 5 | 5 | 5 |
表2
控制器参数设置"
| 参数 | 数值 |
| 2/13 | |
| 4/13 | |
| 0.25 | |
| 30 | |
| 30 | |
| 30 | |
| 0.75 | |
| 0.75 | |
| 0.1 | |
| 12 | |
| 15 | |
| 15 | |
| 0.5 | |
| 0.5 | |
| 0.09 |
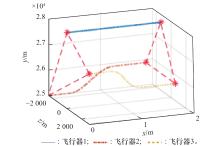
图3
各高超声速飞行器轨迹"
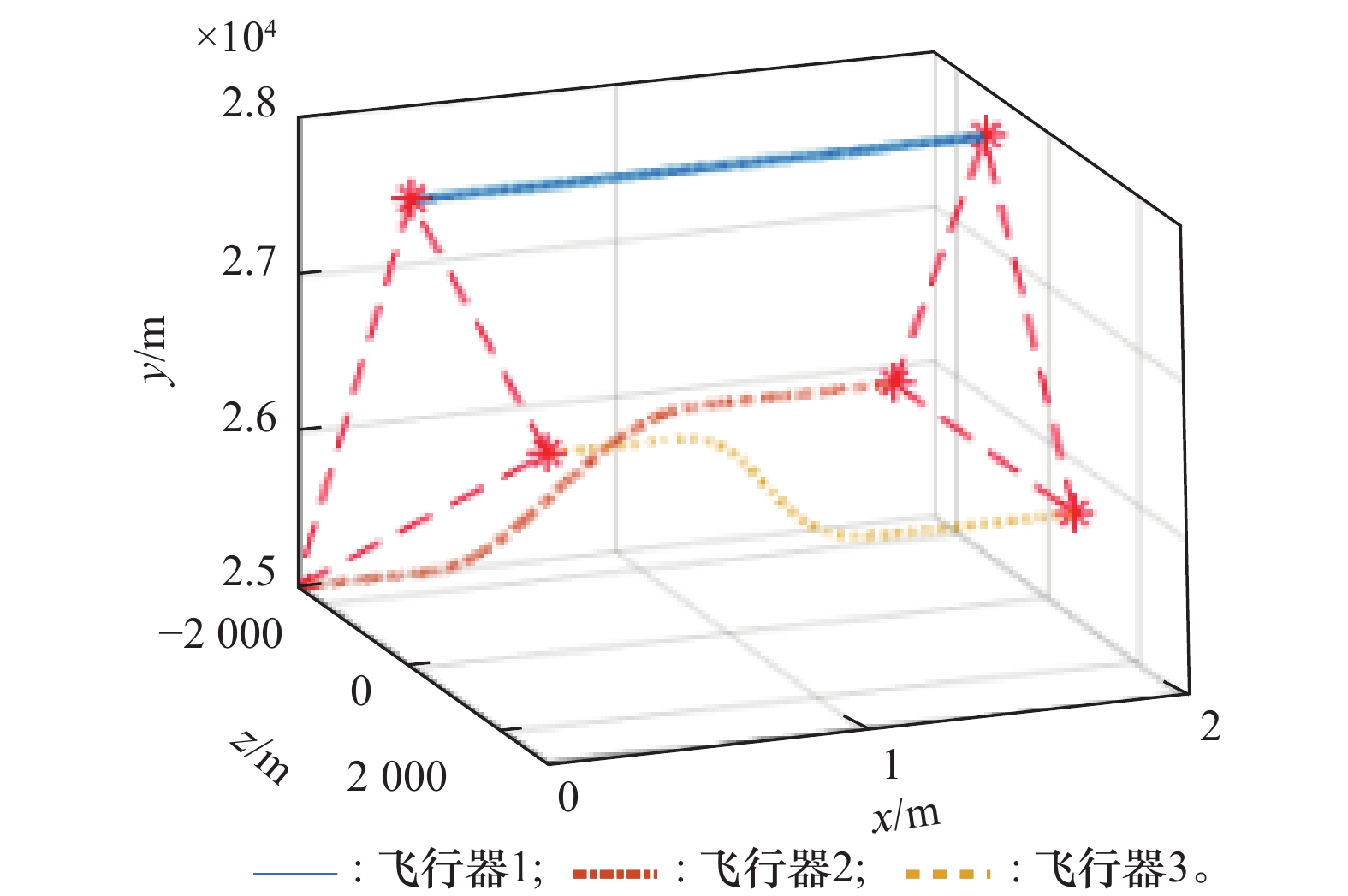
图4
位置协同误差"
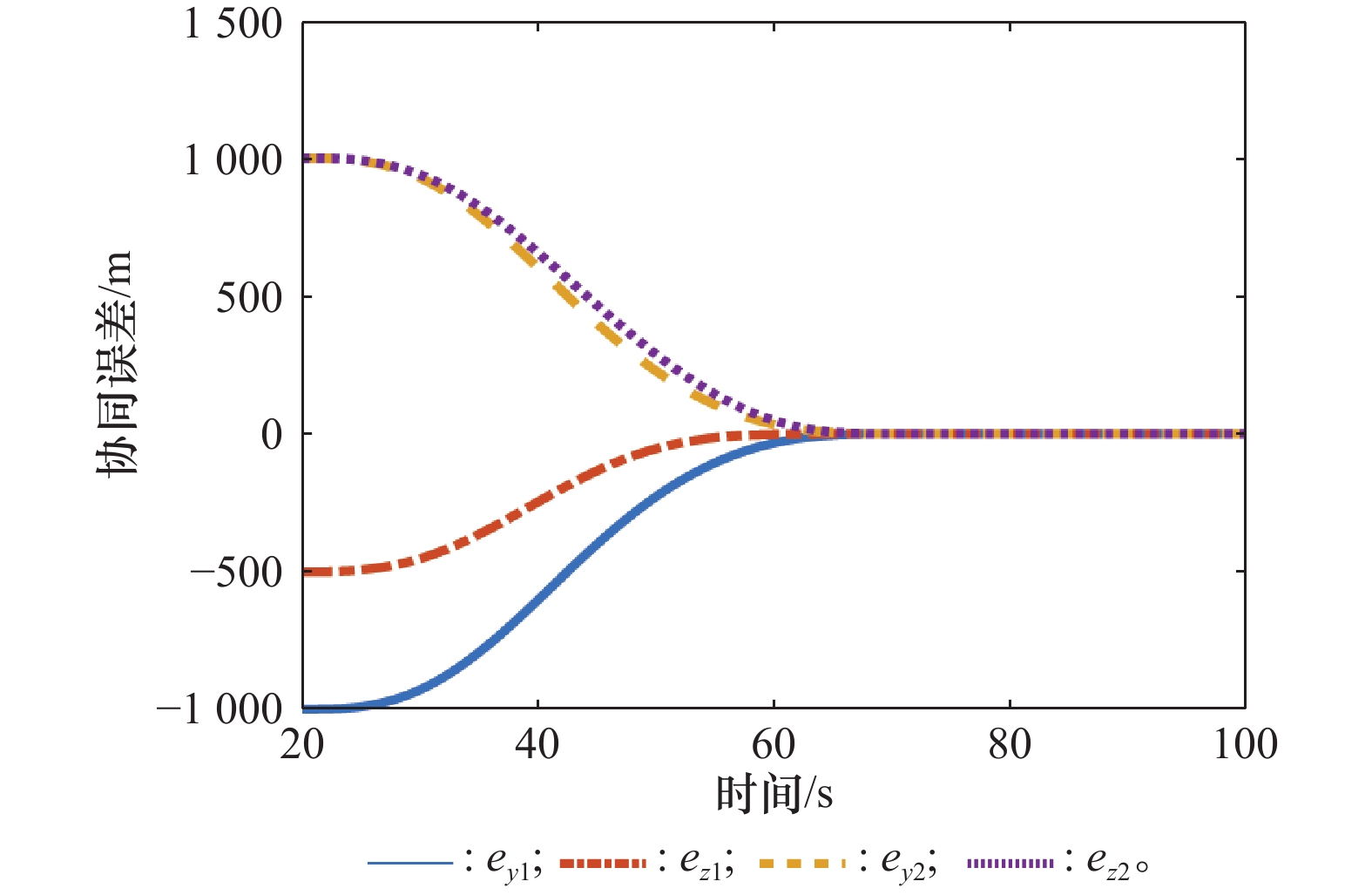
图5
各高超声速飞行器速度"
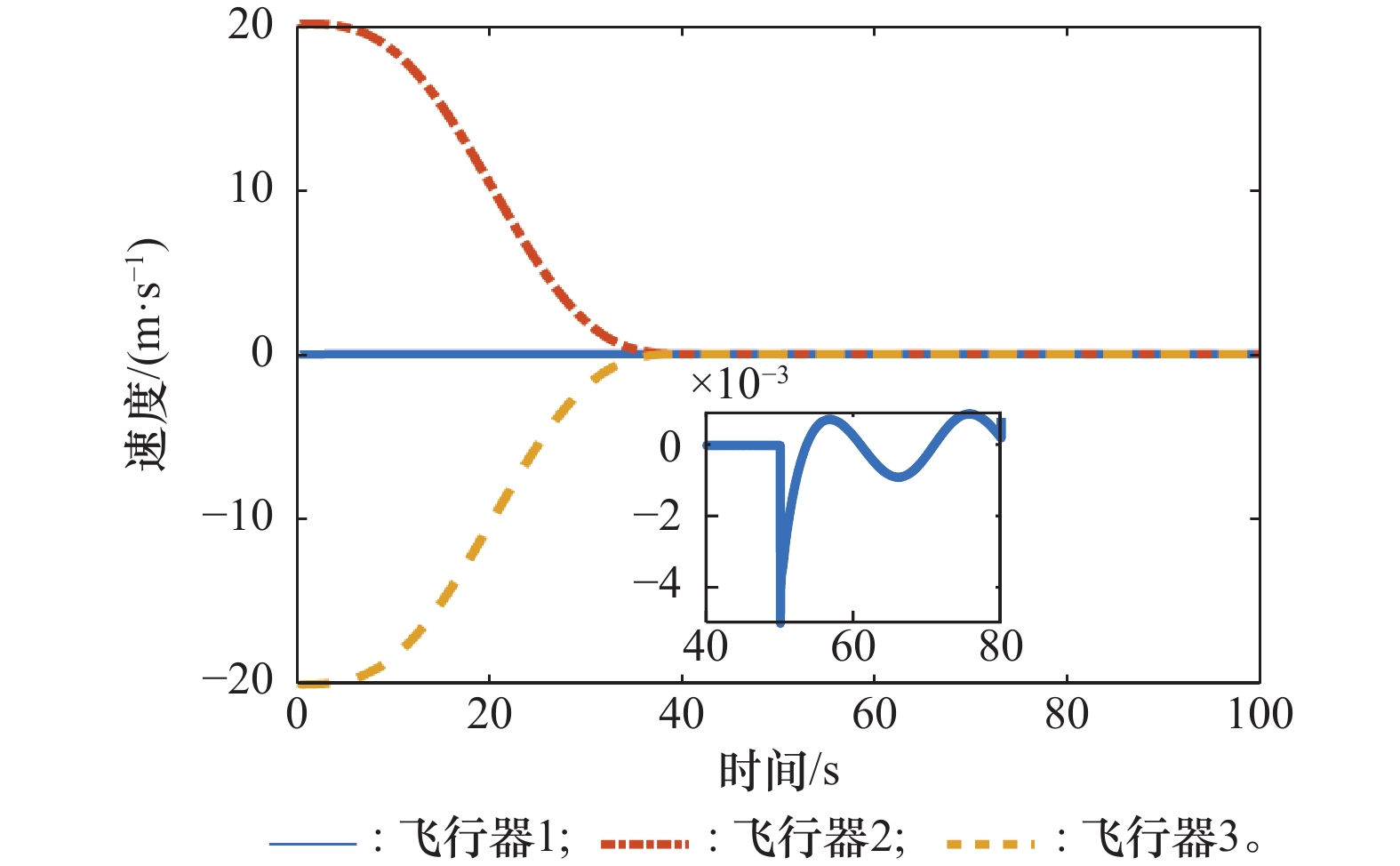
图6
各高超声速飞行器油门开度"
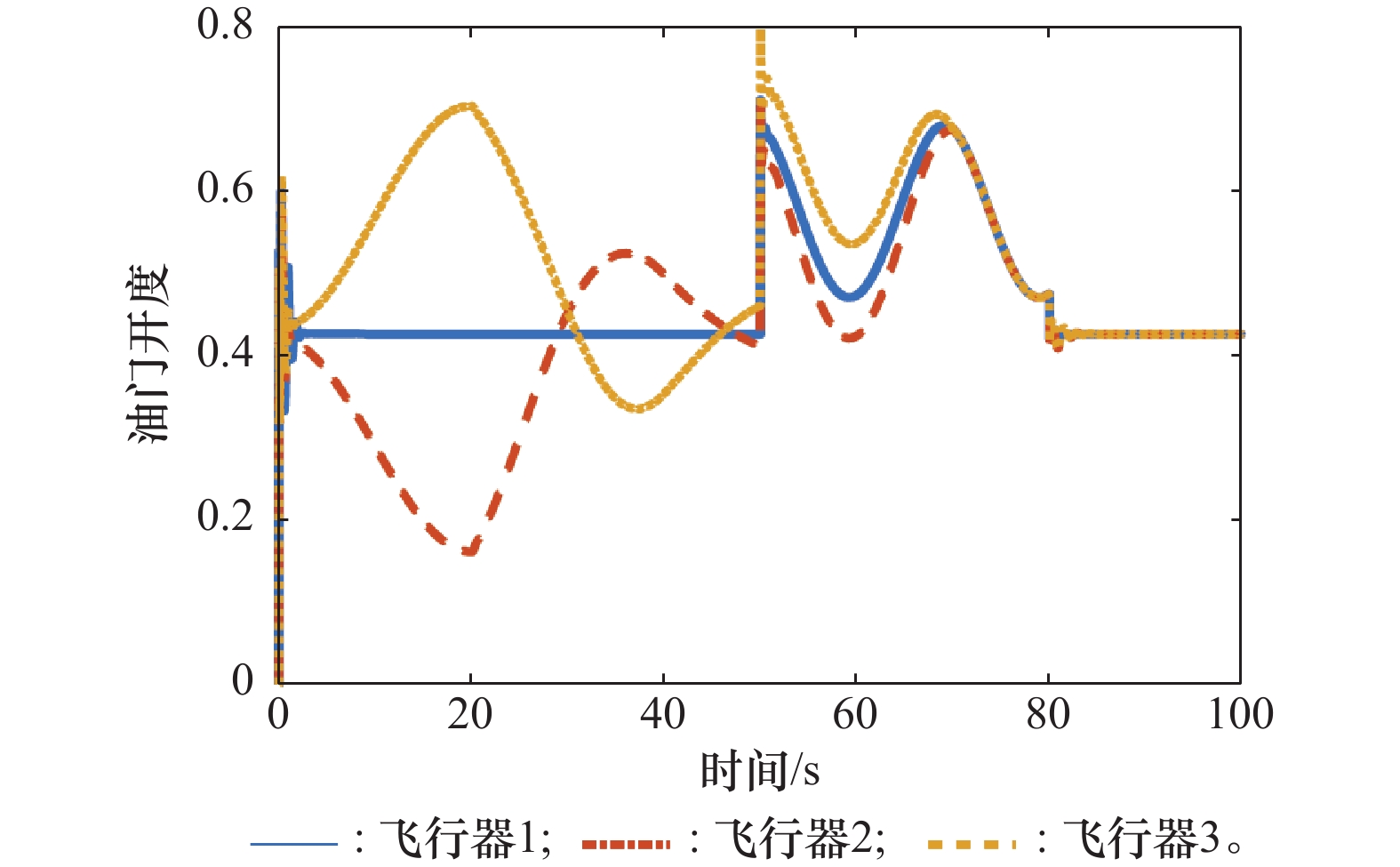
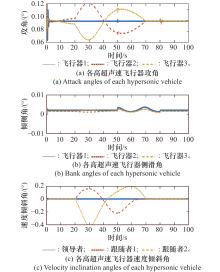
图7
各高超声速飞行器姿态角"
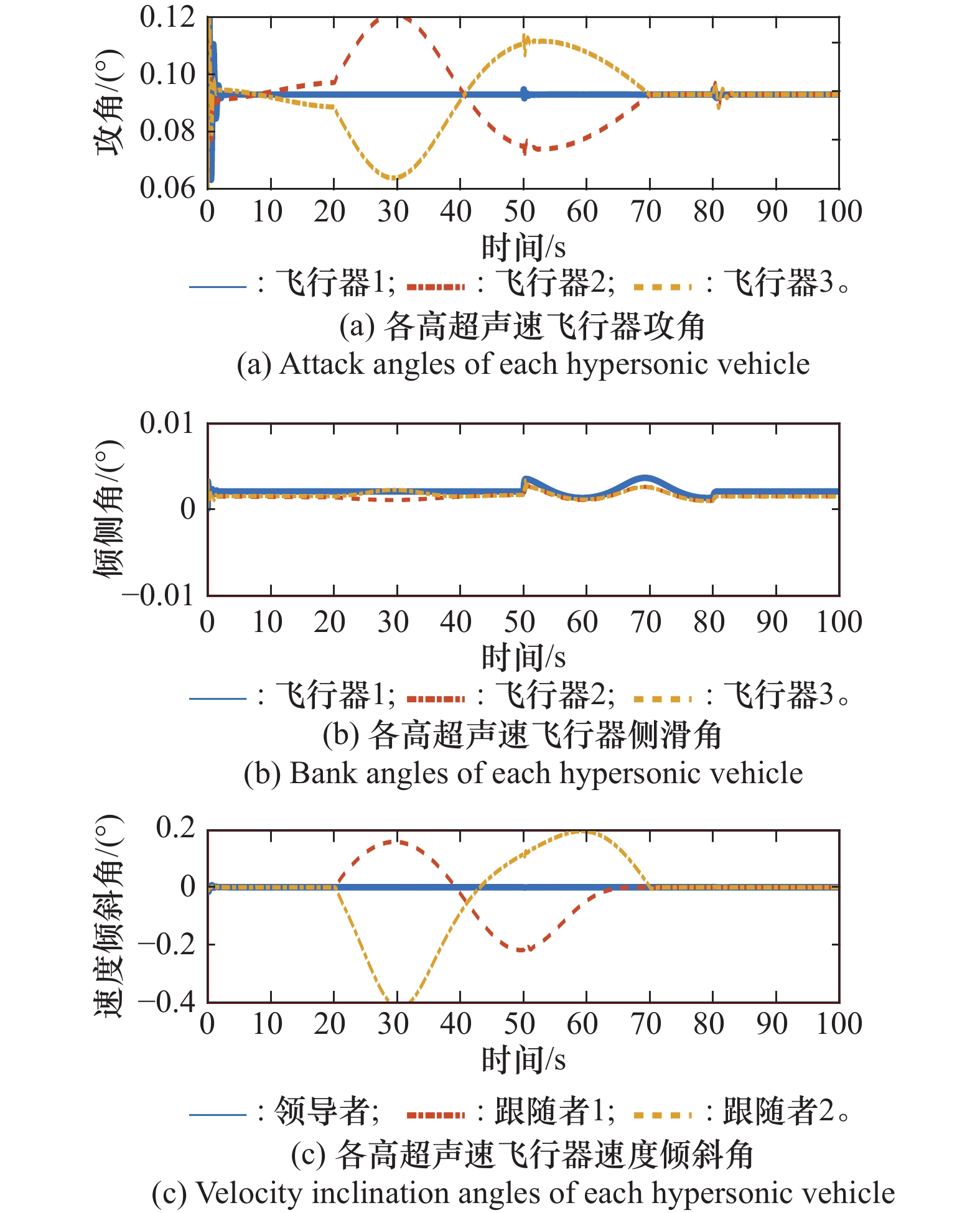

图8
飞行器舵偏角"
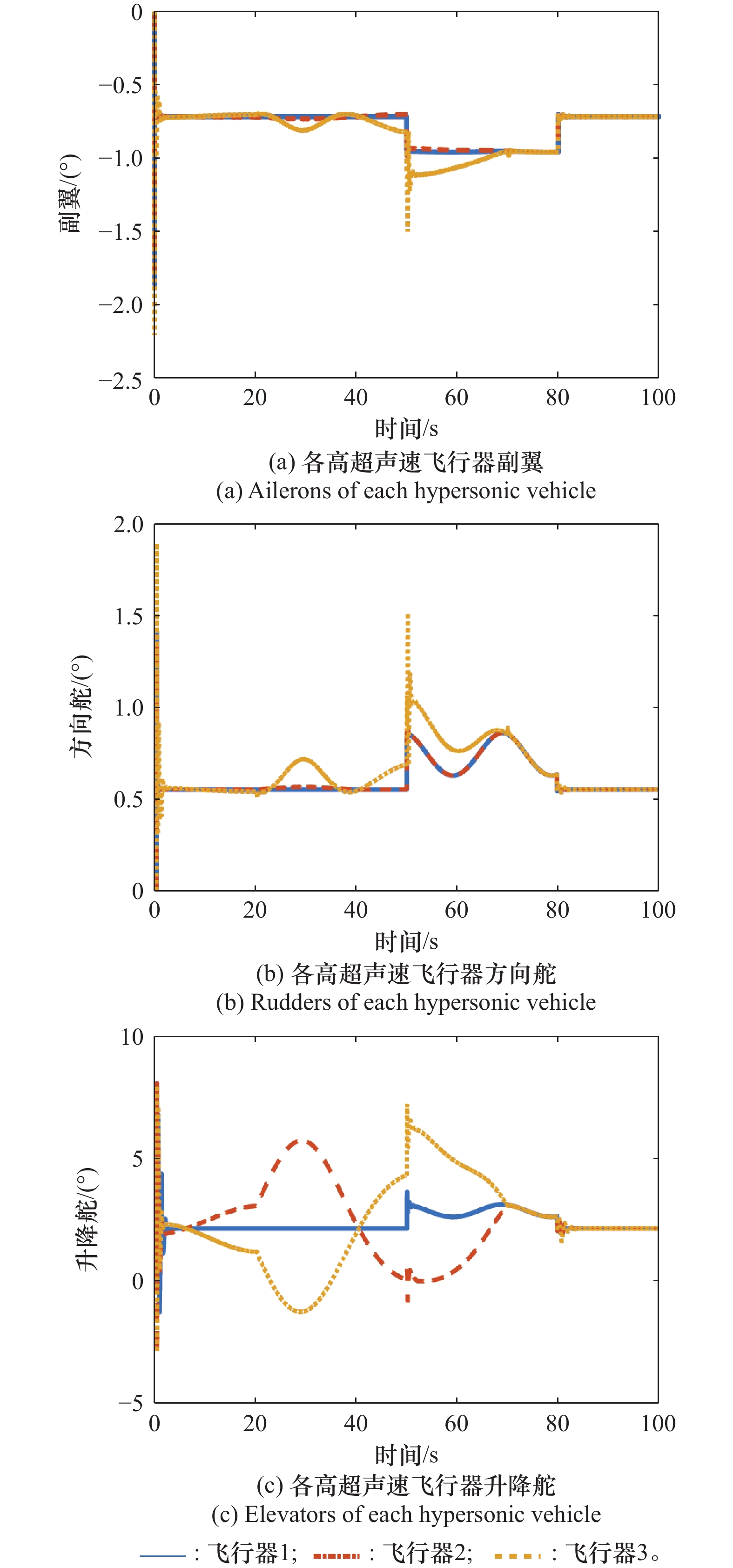
图9
控制信号量化"
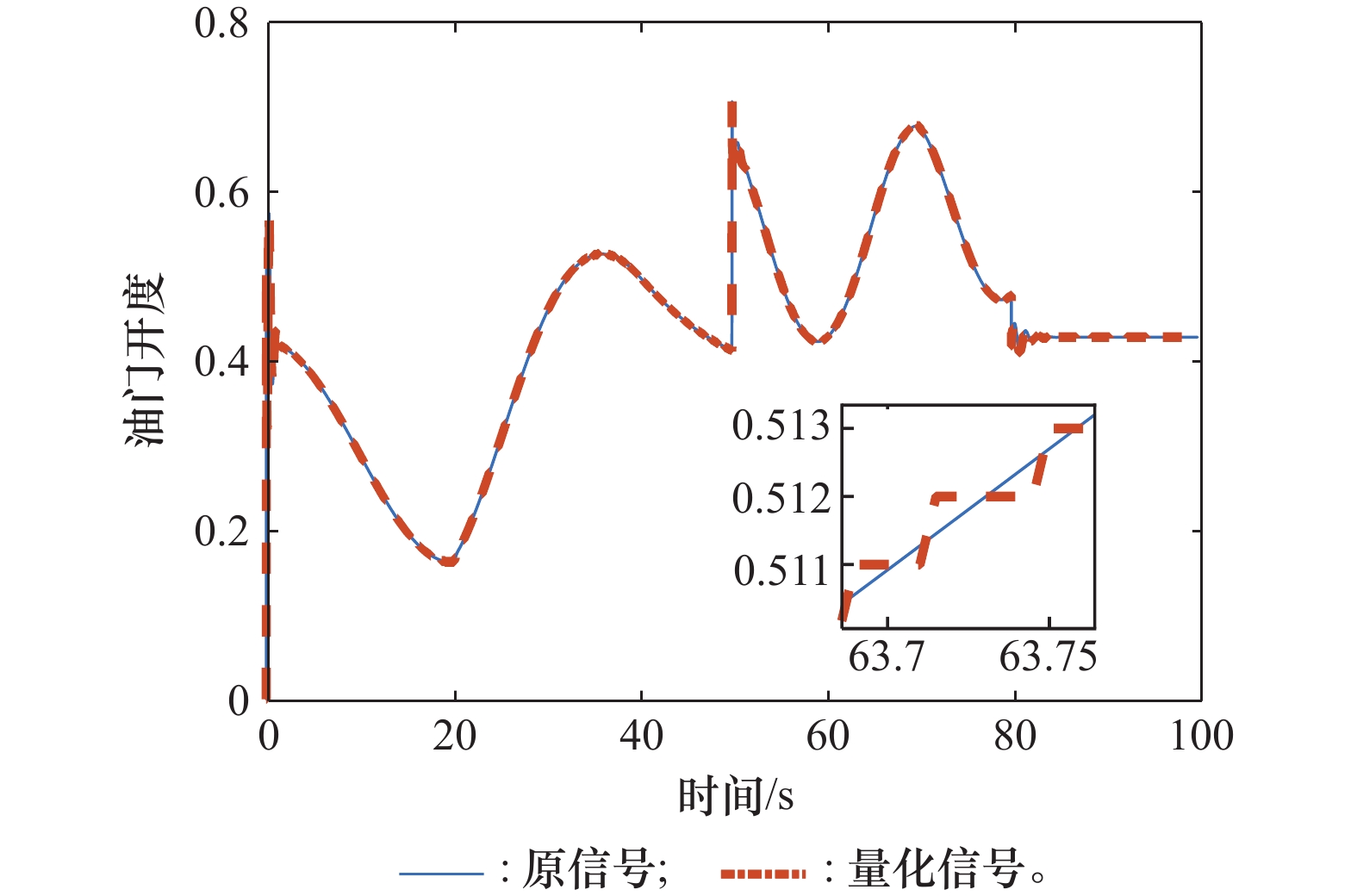
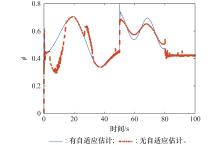
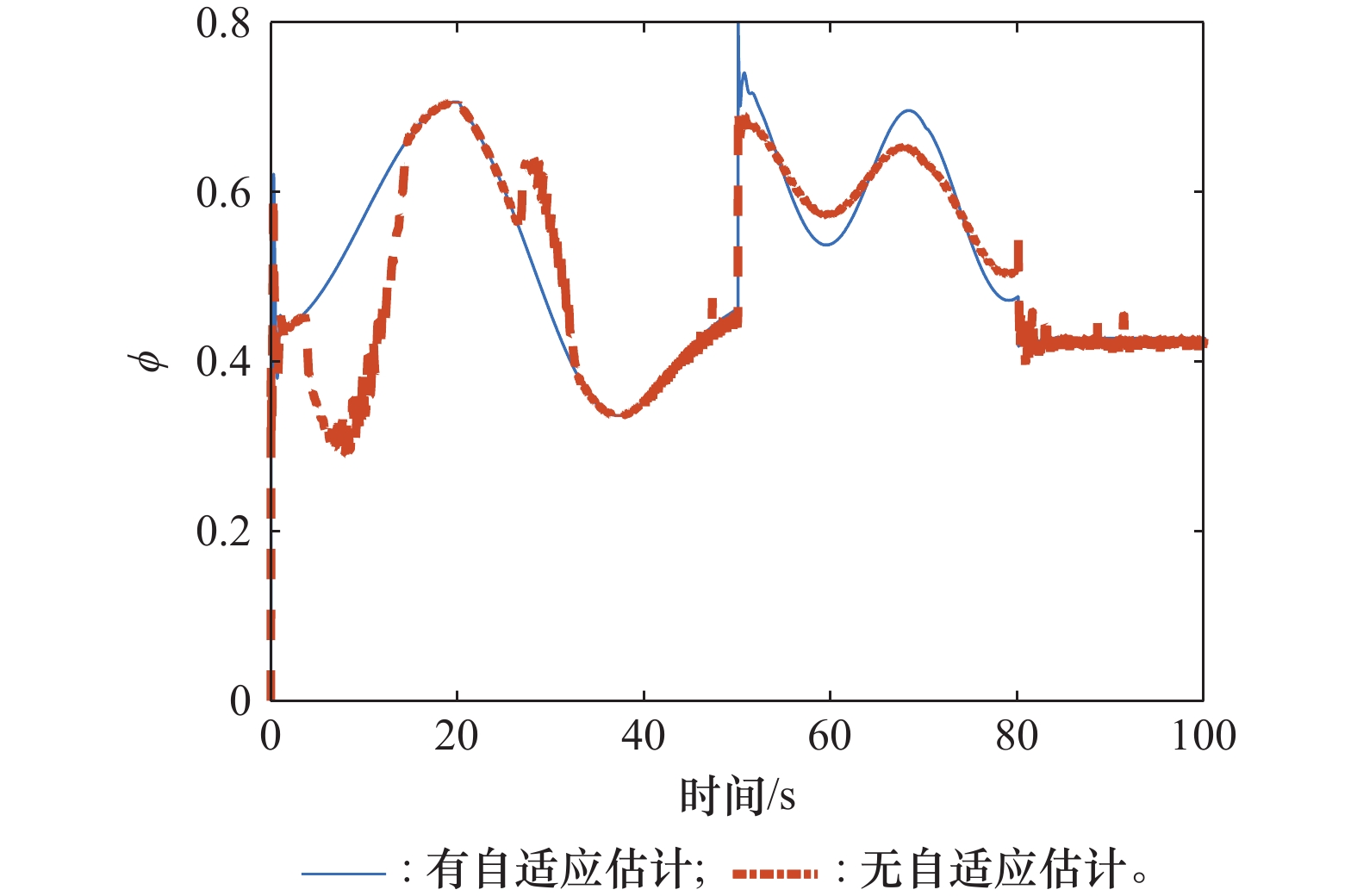
图10
自适应估计对比结果"
| 1 |
王冠, 茹海忠, 张大力, 等. 弹性高超声速飞行器智能控制系统设计[J]. 系统工程与电子技术, 2022, 44 (7): 2276- 2285.
doi: 10.12305/j.issn.1001-506X.2022.07.24 |
|
WANG G, RU H Z, ZHANG D L, et al. Design of intelligent control system for flexible hypersonic vehicle[J]. Systems Engineering and Electronics, 2022, 44 (7): 2276- 2285.
doi: 10.12305/j.issn.1001-506X.2022.07.24 |
|
| 2 |
QI Y K, MA X F, JIANG P X, et al. Review on heat-to-power conversion technologies for hypersonic vehicles[J]. Chinese Journal of Aeronautics, 2024, 37 (5): 148- 179.
doi: 10.1016/j.cja.2023.11.002 |
| 3 | 权申明, 王松艳, 晁涛, 等. 基于改进人工势场法的再入制导方法[J]. 系统工程与电子技术, 2023, 45 (7): 2158- 2169. |
| QUAN S M, WANG S Y, CHAO T, et al. Reentry guidance method based on improved artificial potential field method[J]. Systems Engineering and Electronics, 2023, 45 (7): 2158- 2169. | |
| 4 |
PETERS A B, ZHANG D J, CHEN S, et al. Materials design for hypersonics[J]. Nature Communications, 2024, 15 (1): 3328.
doi: 10.1038/s41467-024-46753-3 |
| 5 |
GUO S Q, LIU W, ZHANG C A, et al. Simplified analytical models for hypersonic lateral-directional stability[J]. Acta Astronautica, 2022, 198, 431- 444.
doi: 10.1016/j.actaastro.2022.06.024 |
| 6 |
CAO W J, ZHANG D, FENG G. Resilient semi-global finite-time cooperative output regulation of heterogeneous linear multi-agent systems subject to denial-of-service attacks[J]. Automatica, 2025, 173, 112099.
doi: 10.1016/j.automatica.2024.112099 |
| 7 |
DENG C, XU L, YANG T, et al. Distributed cooperative optimization for nonlinear heterogeneous MASs under intermittent communication[J]. IEEE Trans. on Automatic Control, 2024, 69 (4): 2737- 2744.
doi: 10.1109/TAC.2023.3339435 |
| 8 | 刘正洋, 周丽, 张瑞. 随机参数摄动下的高超声速飞行器姿态控制[J]. 系统工程与电子技术, 2024, 46 (2): 703- 714. |
| LIU Z Y, ZHOU L, ZHANG R. Attitude control of hypersonic vehicle with random parameter perturbations[J]. Systems Engineering and Electronics, 2024, 46 (2): 703- 714. | |
| 9 | 董泽洪, 李颖晖, 吕茂隆, 等. 考虑输入受限的高超声速飞行器非奇异固定时间自适应切换控制[J]. 系统工程与电子技术, 2023, 45 (5): 1476- 1488. |
| DONG Z H, LI Y H, LYU M L, et al. Singularity-free fixed-time adaptive switching control for hypersonic flight vehicle with input constraints[J]. Systems Engineering and Electronics, 2023, 45 (5): 1476- 1488. | |
| 10 | GOU X Y, LIU J K, LIU B J, et al. Backstepping control of hypersonic vehicles under input and output constraints with model uncertainties and disturbances[J]. International Journal of Control, 2025, 98 (5): 1147- 1159. |
| 11 |
WANG H, ZHOU D, ZHANG Y Q, et al. Compound control design of near-space hypersonic vehicle based on a time-varying linear quadratic regulator and sliding mode method[J]. Aerospace, 2024, 11 (7): 567.
doi: 10.3390/aerospace11070567 |
| 12 | 水晓冰, 王晓芳, 林平, 等. 高超声速飞行器编队方法[J]. 战术导弹技术, 2020, (5): 139- 148. |
| SHUI X B, WANG X F, LIN P, et al. A formation control method of multiple hypersonic missiles[J]. Tactical Missile Technology, 2020, (5): 139- 148. | |
| 13 | 阎洪磊, 陆远, 郭杰, 等. 欠驱动高超滑翔飞行器集群协同编队控制方法[J]. 空天防御, 2024, 7 (1): 57- 62. |
| YAN H L, LU Y, GUO J, et al. Cluster cooperative formation control method for underactuated hypersonic vehicle[J]. Air & Space Defense, 2024, 7 (1): 57- 62. | |
| 14 |
AN K, GUO Z Y, HUANG W, et al. A cooperative guidance approach based on the finite-time theory for hypersonic vehicles[J]. International Journal of Aeronautical and Space Sciences, 2022, 23 (1): 169- 179.
doi: 10.1007/s42405-021-00416-5 |
| 15 |
WU X, WEI C S, CHEN T Y, et al. On novel distributed fixed-time formation tracking of multiple hypersonic flight vehicles with collision avoidance[J]. Aerospace Science and Technology, 2023, 141, 108517.
doi: 10.1016/j.ast.2023.108517 |
| 16 |
LV M L, SCHUTTER B D, BALDI S. Nonrecursive control for formation-containment of HFV swarms with dynamic event-triggered communication[J]. IEEE Trans. on Industrial Informatics, 2023, 19 (3): 3188- 3197.
doi: 10.1109/TII.2022.3163573 |
| 17 |
YANG S, PAN Y, PAN L, et al. Predefined-time fault-tolerant consensus tracking control for multi-UAV systems with prescribed performance and attitude constraints[J]. IEEE Trans. on Aerospace and Electronic Systems, 2024, 60 (4): 4058- 4072.
doi: 10.1109/TAES.2024.3371406 |
| 18 | SUN J G, LI C M, GUO Y, et al. Adaptive fault tolerant control for hypersonic vehicle with input saturation and state constraints[J]. Acta Astronautica, 2020, 167, 302- 313. |
| 19 | 王世豪, 曹腾, 高艺. 基于学习观测器的高超声速飞行器容错控制[J]. 飞行力学, 2025, 43 (4): 62- 68. |
| WANG S H, CAO T, GAO Y. Learning observer-based fault-tolerant tracking control for hypersonic vehicle[J]. Flight Dynamics, 2025, 43 (4): 62- 68. | |
| 20 |
WANG L, QI R Y, WEN L Y, et al. Adaptive multiple-model-based fault-tolerant control for non-minimum phase hypersonic vehicles with input saturations and error constraints[J]. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (1): 519- 540.
doi: 10.1109/TAES.2022.3185576 |
| 21 | 禹志龙, 李颖晖, 裴彬彬, 等. 基于事件触发采样的无尾翼飞机自适应容错姿态控制[J]. 系统工程与电子技术, 2024, 46 (3): 1058- 1066. |
| YU Z L, LI Y H, PEI B B, et al. Adaptive fault-tolerant attitude control of tailless aircraft based on event-triggered sampling[J]. Systems Engineering and Electronics, 2024, 46 (3): 1058- 1066. | |
| 22 | 史浩宇. 多旋翼飞行器的三维时变编队量化控制[J]. 火力与控制指挥, 2020, 45 (9): 122- 128. |
| SHI H Y. Quantitative control of three-dimensional time-varying formation for multi-rotor aircraft[J]. Fire Control & Command Control, 2020, 45 (9): 122- 128. | |
| 23 |
马梓元, 万茹, 龚华军, 等. 异构多智能体输出调节量化自适应跟踪控制[J]. 宇航学报, 2024, 45 (3): 469- 477.
doi: 10.3873/j.issn.1000-1328.2024.03.014 |
|
MA Z Y, WAN R, GONG H J, et al. Heterogeneous multi-agent output adjustment quantization adaptive tracking control[J]. Journal of Astronautics, 2024, 45 (3): 469- 477.
doi: 10.3873/j.issn.1000-1328.2024.03.014 |
|
| 24 | SHI Y, SHAO X L, ZHANG W D. Quantized learning control for flexible air-breathing hyper-sonic vehicle with limited actuator bandwidth and prescribed performance[J]. Aerospace Science and Technology, 2020, 97, 105629. |
| 25 |
SHAO X L, SHI Y, ZHANG W D. Fault-tolerant quantized control for flexible air-breathing hypersonic vehicles with appointed-time tracking performances[J]. IEEE Trans. on Aerospace and Electronic Systems, 2021, 57 (2): 1261- 1273.
doi: 10.1109/TAES.2020.3040519 |
| 26 | 钱杏芳, 林瑞雄, 赵亚男. 导弹飞行力学[M]. 北京: 北京理工大学出版社, 2000. |
| QIAN X F, LIN R X, ZHAO Y N. Missile flight mechanics[M]. Beijing: Beijing Institute of Technology Press, 2000. | |
| 27 | 吴森堂. 飞航导弹制导控制系统随机鲁棒分析与设计[M]. 北京: 国防工业出版社, 2010. |
| WU S T. Stochastic robustness analysis and design for guidance and control system of winged missile[M]. Beijing: National Defense Industry Press, 2010. | |
| 28 | 王忠森, 廖新宇, 魏才盛, 等. 高超声速飞行器快速终端滑模保性能容错控制[J]. 航空学报, 2023, 44 (24): 328476. |
| WANG Z S, LIAO X Y, WEI C S, et al. Fast terminal sliding mode fault-tolerant control of hypersonic vehicle with guaranteed performance[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (24): 328476. | |
| 29 | ZHANG M J, ZANG H Y, BAI L Y. A new predefined-time sliding mode control scheme for synchronizing chaotic systems[J]. Chaos, Solitons and Fractals., 2022, 164 |
| 30 | ZHAO Z J, ZHANG J, LIU Z J, et al. Adaptive quantized fault-tolerant control of a 2-DOF helicopter system with actuator fault and unknown dead zone[J]. Automatica, 2023, 148 (1): 110792. |
| 31 |
ZHANG B Y, SUN X X, LV M L, et al. Distributed adaptive fixed-time fault-tolerant control for multiple 6-DOF UAVs with full-state constraints guarantee[J]. IEEE Systems Journal, 2022, 16 (3): 4792- 4803.
doi: 10.1109/JSYST.2021.3128973 |
| [1] | 安帅斌, 刘泓麟, 董哲, 刘君, 刘凯. 吸气式高超声速飞行器高性能姿态控制方法[J]. 系统工程与电子技术, 2026, 48(6): 2042-2051. |
| [2] | 张杰, 常天庆, 王晓卫, 郝文龙, 汤鑫. 基于可见光与红外特征融合的轻量化目标检测方法[J]. 系统工程与电子技术, 2026, 48(5): 1481-1491. |
| [3] | 王旭, 蔡光斌, 余晓亚, 叶子绮, 单斌. 基于双动态PPO算法的高超声速飞行器姿态控制[J]. 系统工程与电子技术, 2026, 48(2): 694-704. |
| [4] | 黄迅, 陈柏屹, 彭寿勇, 刘燕斌, 杨犇, 庞浩然. 控制约束下的高超声速飞行器轨迹优化策略[J]. 系统工程与电子技术, 2025, 47(5): 1646-1654. |
| [5] | 邢胜杰, 赵冬, 任文静. 基于事件触发的柔性机械臂执行器故障补偿[J]. 系统工程与电子技术, 2025, 47(4): 1311-1318. |
| [6] | 黄绍洧, 都延丽, 刘燕斌, 王跃萍, 刘武. 有限时间收敛的自适应滑模协同末制导[J]. 系统工程与电子技术, 2025, 47(3): 961-969. |
| [7] | 郭立民, 黄文青, 陈前, 王佳宾. 轻量化的ML-SNet雷达复合干扰识别算法[J]. 系统工程与电子技术, 2025, 47(2): 418-427. |
| [8] | 赵万兵, 夏元清, 戴荔, 张元. 弱通信下无人潜航器事件触发一致性协同控制[J]. 系统工程与电子技术, 2025, 47(2): 591-599. |
| [9] | 廖宇新, 许炜平, 陈琪锋, 殷泽阳. 高超声速飞行器机动突防制导控制一体化设计[J]. 系统工程与电子技术, 2025, 47(12): 4153-4165. |
| [10] | 朱金钊, 周荻, 陈晓波, 蔡明春. 临近空间高超声速飞行器快时变机动模型及轨迹预报[J]. 系统工程与电子技术, 2025, 47(1): 244-253. |
| [11] | 胡洋, 刘学超, 李化义, 曹芊. 多星姿态协同中的几何鲁棒控制[J]. 系统工程与电子技术, 2024, 46(9): 3118-3127. |
| [12] | 孙先涛, 江汪洋, 陈文杰, 陈伟海, 智亚丽. 基于感兴趣区域的物体抓取位姿检测[J]. 系统工程与电子技术, 2024, 46(6): 1867-1877. |
| [13] | 刘绍华, 杜康, 佘春东, 杨傲. 基于CenterNet的多教师联合知识蒸馏[J]. 系统工程与电子技术, 2024, 46(4): 1174-1184. |
| [14] | 袁心悦, 陈洪, 丁璐, 宋磊, 黄丹. 基于安全性建模的民机ILS信号设计[J]. 系统工程与电子技术, 2024, 46(4): 1255-1263. |
| [15] | 黄思佳, 宋纯锋, 李璇. 基于可变尺度先验框的声呐图像目标检测[J]. 系统工程与电子技术, 2024, 46(3): 771-778. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||