
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (12): 4153-4165.doi: 10.12305/j.issn.1001-506X.2025.12.27
• 制导、导航与控制 • 上一篇
廖宇新, 许炜平, 陈琪锋, 殷泽阳
收稿日期:2024-10-28
修回日期:2025-04-14
出版日期:2025-05-29
发布日期:2025-05-29
通讯作者:
许炜平
作者简介:廖宇新(1989—),男,副教授,博士,主要研究方向为飞行器智能自主控制,空天运载器轨迹规划、制导和控制基金资助:Yuxin LIAO, Weiping XU, Qifeng CHEN, Zeyang YIN
Received:2024-10-28
Revised:2025-04-14
Online:2025-05-29
Published:2025-05-29
Contact:
Weiping XU
摘要:
针对高超声速飞行器俯冲段存在拦截威胁的多约束精确打击任务需求,提出一种机动突防制导控制一体化设计方法。首先,基于线偏差概念建立多约束机动突防制导控制一体化设计模型。其次,分别设计虚拟导引制导律和相对机动制导律实现机动与制导的协调设计。再次,在预设性能干扰观测器和抗饱和辅助系统的基础上,引入非对称时变障碍Lyapunov函数实现状态与输入约束下的高精度姿态控制。进一步,基于Lyapunov理论证明了闭环系统的稳定性。最后,通过对比数值仿真验证了所提方法的有效性和鲁棒性。
中图分类号:
廖宇新, 许炜平, 陈琪锋, 殷泽阳. 高超声速飞行器机动突防制导控制一体化设计[J]. 系统工程与电子技术, 2025, 47(12): 4153-4165.
Yuxin LIAO, Weiping XU, Qifeng CHEN, Zeyang YIN. Integrated maneuvering penetration guidance and control design for hypersonic vehicle[J]. Systems Engineering and Electronics, 2025, 47(12): 4153-4165.

图1
机动突防场景"
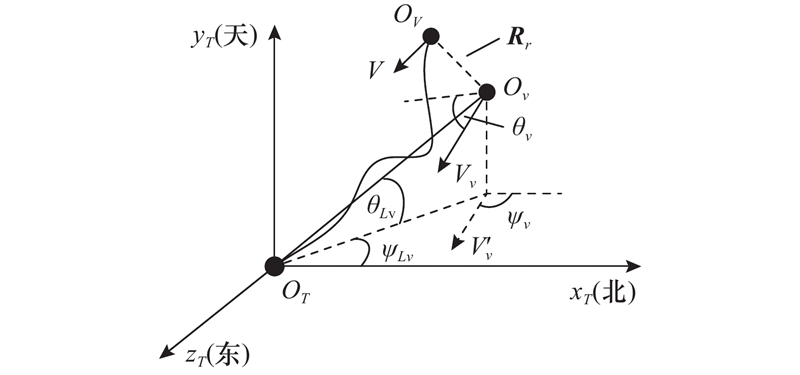

图2
各坐标系间转换关系示意图"
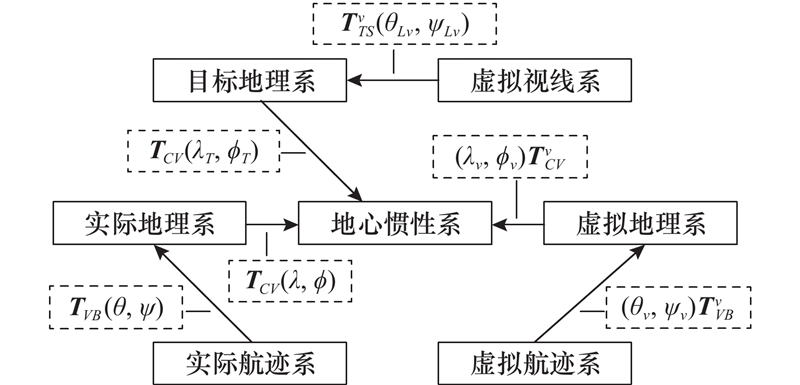

图3
机动突防制导控制一体化设计方法流程图"
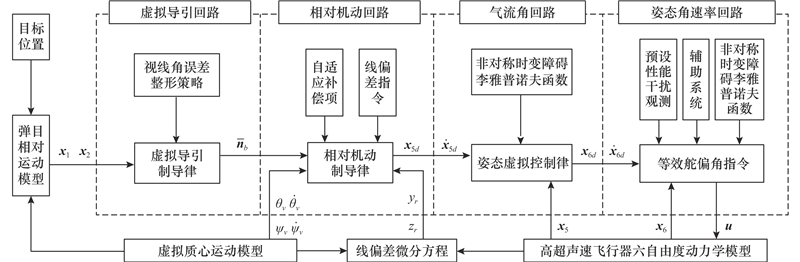
表1
仿真初始条件设置"
| 仿真参数 | 数值 | 仿真参数 | 数值 | 仿真参数 | 数值 | 仿真参数 | 数值 | |||
| 19.5 | 0 | |||||||||
| 2 | −1 | 0 | 0 | |||||||
| 2 | 140 | −17 | 0 | |||||||
| 0 | 1.01 | 1.01 | 30 | |||||||
| 25 | −50 | — | — | — | — |
表2
高超声速飞行器参数设置"
| 飞行器参数 | 数值 | 飞行器参数 | 数值 | 飞行器参数 | 数值 | 飞行器参数 | 数值 | |||
| 5.4 | 6.202 | 784.14 | ||||||||
| 448.99 | 0 | |||||||||
| 0 | 2 | 45 | 45 | |||||||
| 45 | 15 | 15 | 15 |
表3
本文方法参数设置"
| 回路 | 参数设置 |
| 虚拟导引回路 | |
| 相对机动回路 | |
| 姿控回路 | |
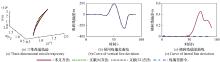
图4
三维弹道轨迹与线偏差曲线"

图5
高超声速飞行器气流角曲线"

图6
高超声速飞行器姿态角速率曲线"

图7
高超声速飞行器舵偏角曲线"
表4
典型攻防场景仿真结果统计"
| 方法 | |||||
| 本文方法 | − | ||||
| 文献[ | |||||
| 文献[ | − | − |
图8
终端落速落角散布"

图9
终端脱靶量散布"
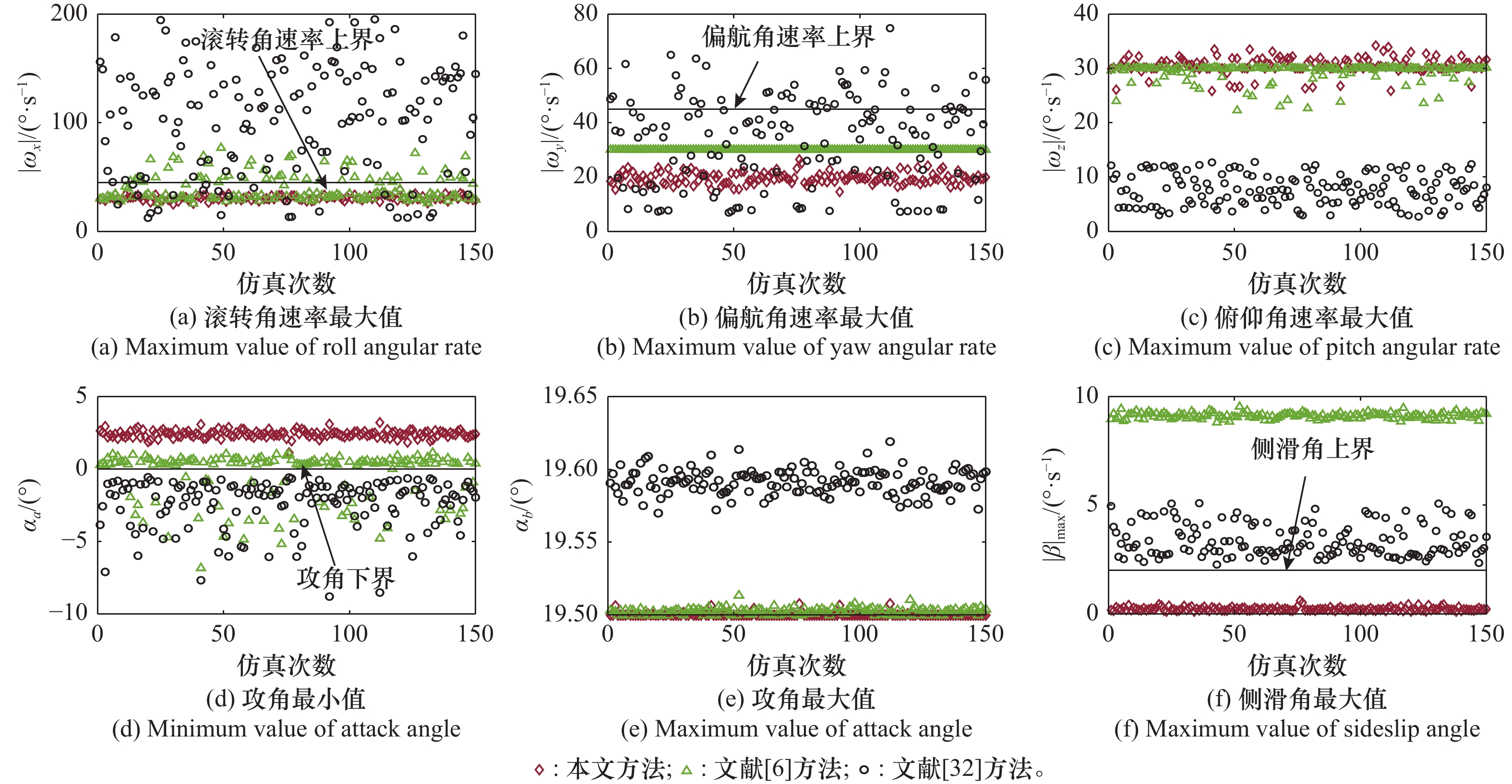
图10
飞行状态最大值与最小值散布"
| 1 |
安通, 王鹏, 王建华, 等. 弹性高超声速飞行器动态面制导控制一体化设计方法[J]. 系统工程与电子技术, 2022, 44 (3): 956- 966.
doi: 10.12305/j.issn.1001-506X.2022.03.28 |
|
AN T, WANG P, WANG J H, et al. Integrated guidance and control schemes for dynamic surface of flexible hypersonic vehicles[J]. Systems Engineering and Electronics, 2022, 44 (3): 956- 966.
doi: 10.12305/j.issn.1001-506X.2022.03.28 |
|
| 2 | HE L, YAN X D. Adaptive terminal guidance law for spiral diving maneuver based on virtual sliding targets[J]. Journal of Guidance, Control, and Dynamics, 2018, 41 (7): 1589- 1599. |
| 3 |
黄鲁豫, 曲鑫, 凡永华, 等. 多约束下的导弹螺旋机动制导控制一体化设计[J]. 宇航学报, 2021, 42 (9): 1108- 1118.
doi: 10.3873/j.issn.1000-1328.2021.09.006 |
|
HUANG L Y, QU X, FAN Y H, et al. Integrated guidance and control design for spiral maneuvering missile with multiple constraints[J]. Journal of Astronautics, 2021, 42 (9): 1108- 1118.
doi: 10.3873/j.issn.1000-1328.2021.09.006 |
|
| 4 |
CHEN J Q, SUN R S, LU Y, et al. Adaptive cooperative game penetration guidance for multiple hypersonic vehicles with performance constraints[J]. IEEE Trans. on Aerospace and Electronic Systems, 2024, 60 (4): 5538- 5555.
doi: 10.1109/TAES.2024.3392874 |
| 5 | 乔毅涛, 耿飞龙, 张新, 等. 基于最优控制的高超螺旋俯冲轨迹设计[J]. 飞控与探测, 2021, 4 (4): 49- 58. |
| QIAO Y T, GENG F L, ZHANG X, et al. Supersonic vehicle spiral dive trajectory design based on optimal control[J]. Flight Control & Detection, 2021, 4 (4): 49- 58. | |
| 6 |
YU X J, LUO S B, LIU H Q. Integrated design of multi-constrained snake maneuver surge guidance control for hypersonic vehicles in the dive segment[J]. Aerospace, 2023, 10 (9): 765.
doi: 10.3390/aerospace10090765 |
| 7 |
ZHAO S B, ZHU J W, BAO W M, et al. High-dynamic intelligent maneuvering guidance strategy via deep reinforcement learning[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2023, 237 (11): 2617- 2631.
doi: 10.1177/09544100231155695 |
| 8 |
ZHAO B, LIU T Z, XIANG T Y, et al. Cooperative guidance for maneuvering penetration with attack time consensus and bounded input[J]. International Journal of Aeronautical and Space Sciences, 2024, 25 (4): 1395- 1411.
doi: 10.1007/s42405-024-00727-3 |
| 9 |
赵斌, 刘天泽. 线偏差控制的螺旋机动突防与导引一体化设计[J]. 宇航学报, 2022, 43 (10): 1333- 1344.
doi: 10.3873/j.issn.1000-1328.2022.10.006 |
|
ZHAO B, LIU T Z. Integrated design of maneuvering penetration and guidance based on line deviation control[J]. Journal of Astronautics, 2022, 43 (10): 1333- 1344.
doi: 10.3873/j.issn.1000-1328.2022.10.006 |
|
| 10 | 卫长竖, 赵斌, 赵瑞, 等. 线偏差控制的协同机动突防、导引与控制一体化[J]. 宇航学报, 2024, 45 (6): 924- 934. |
| WEI C S, ZHAO B, ZHAO R, et al. Line deviation control of cooperative maneuvering penetration, guidance and control integration[J]. Journal of Astronautics, 2024, 45 (6): 924- 934. | |
| 11 |
LI G J, LIU L, LIU J G, et al. Three-dimensional low-order fixed-time integrated guidance and control for STT missile with strap-down seeker[J]. Journal of The Franklin Institute-Engineering and Applied Mathematics, 2023, 360 (13): 9788- 9811.
doi: 10.1016/j.jfranklin.2023.07.028 |
| 12 |
CHAO T, QUAN S M, MA P, et al. Three-dimensional low-order finite-time integrated guidance and control design with side-window constraint[J]. Aerospace Science and Technology, 2022, 121, 107355.
doi: 10.1016/j.ast.2022.107355 |
| 13 |
LIANG L C, ZHAO B, ZHOU J, et al. Impact angle controlled integrated guidance and control with input and state constraints[J]. International Journal of Control, 2024, 97 (4): 796- 810.
doi: 10.1080/00207179.2023.2175408 |
| 14 |
LI J F, SONG S M, SHI X P. Full state-constrained integrated guidance and control for aerial interceptors with tunnel prescribed performance using integral barrier Lyapunov function[J]. International Journal of Robust and Nonlinear Control, 2024, 34 (12): 8090- 8126.
doi: 10.1002/rnc.7384 |
| 15 |
LI G J, WU Y M, LIU J G, et al. Nonlinear transformed function-based adaptive finite-time integrated guidance and control design with full state constraints[J]. Aerospace Science and Technology, 2023, 143, 108723.
doi: 10.1016/j.ast.2023.108723 |
| 16 |
LI Z B, DONG Q L, ZHANG X Y, et al. Impact angle-constrained integrated guidance and control for supersonic skid-to-turn missiles using backstepping with global fast terminal sliding mode control[J]. Aerospace Science and Technology, 2022, 122, 107386.
doi: 10.1016/j.ast.2022.107386 |
| 17 |
CUI L, ZHEN Z, ZHANG K, et al. Prescribed-time integrated guidance and control for bank to turn reentry vehicle[J]. Aerospace Science and Technology, 2024, 150, 109218.
doi: 10.1016/j.ast.2024.109218 |
| 18 |
WANG Z, HAO Y T. Reinforcement learning adaptive risk-sensitive fault-tolerant IGC method for a class of STT missile[J]. Nonlinear Dynamics, 2024, 112 (20): 18195- 18218.
doi: 10.1007/s11071-024-09776-5 |
| 19 |
XU W P, LIAO Y X, WANG X, et al. Range-varying sliding mode-based integrated guidance and control for hypersonic vehicle with multi-constraints[J]. International Journal of Robust and Nonlinear Control, 2025, 35 (6): 2383- 2398.
doi: 10.1002/rnc.7804 |
| 20 |
XU W P, LIAO Y X, SU J X, et al. Error shaping strategy-based multi-constrained integrated guidance and control for hypersonic vehicle in dive phase[J]. Nonlinear Dynamics, 2025, 113, 14997- 15017.
doi: 10.1007/s11071-025-10900-2 |
| 21 |
LUO Y X, SONG J, ZHAO M F, et al. Integrated guidance and control for a hypersonic vehicle with disturbance and measurement noise suppression[J]. IEEE Trans. on Aerospace and Electronic Systems, 2024, 60 (5): 7172- 7184.
doi: 10.1109/TAES.2024.3412070 |
| 22 |
HU C F, TANG Y F, MI H P, et al. Tube-based composite fault-tolerant control method for flexible hypersonic vehicle[J]. International Journal of Aeronautical and Space Sciences, 2025, 26 (1): 196- 219.
doi: 10.1007/s42405-024-00776-8 |
| 23 |
LIANG X H, WANG Q, HU C H, et al. Fixed-time observer based fault tolerant attitude control for reusable launch vehicle with actuator faults[J]. Aerospace Science and Technology, 2020, 107, 106314.
doi: 10.1016/j.ast.2020.106314 |
| 24 | 王忠森, 廖宇新, 魏才盛, 等. 高超声速飞行器快速终端滑模保性能容错控制[J]. 航空学报, 2023, 44 (24): 328476. |
| WANG Z S, LIAO Y X, WEI C S, et al. Fast terminal sliding mode fault-tolerant control of hypersonic vehicle with guaranteed performance[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (24): 328476. | |
| 25 |
WANG J, ZHANG C, ZHENG C M, et al. Adaptive neural network fault-tolerant control of hypersonic vehicle with immeasurable state and multiple actuator faults[J]. Aerospace Science and Technology, 2024, 152, 109378.
doi: 10.1016/j.ast.2024.109378 |
| 26 |
XU S H, WEI C Z, ZHANG L T, et al. Neural network based adaptive nonsingular practical predefined-time fault-tolerant control for hypersonic morphing aircraft[J]. Chinese Journal of Aeronautics, 2024, 37 (4): 421- 435.
doi: 10.1016/j.cja.2023.12.020 |
| 27 | 王建华. 高超声速飞行器制导控制一体化设计方法研究[D]. 长沙: 国防科学技术大学, 2017. |
| WANG J H. Study on integrated guidance and control design approach for hypersonic vehicles[D]. Changsha: National University of Defense Technology, 2017. | |
| 28 |
WANG X Y, FANG H, DOU L H, et al. Integrated 3-D flight trajectory tracking control with aerodynamic constraints on attitude and control surfaces[J]. Asian Journal of Control, 2018, 20 (5): 1891- 1906.
doi: 10.1002/asjc.1696 |
| 29 | LIAO Y X, LI H F, BAO W M. Three-dimensional diving guidance for hypersonic gliding vehicle via integrated design of FTNDO and AMSTSMC[J]. IEEE Trans. on Industrial Electronics, 2017, 65 (3): 2704- 2715. |
| 30 |
BU X W, WU X Y, HUANG J Q, et al. A guaranteed transient performance-based adaptive neural control scheme with low-complexity computation for flexible air-breathing hypersonic vehicles[J]. Nonlinear Dynamics, 2016, 84, 2175- 2194.
doi: 10.1007/s11071-016-2637-0 |
| 31 |
ZHANG D H, MA P, WANG S Y, et al. Multi-constraints adaptive finite-time integrated guidance and control design[J]. Aerospace Science and Technology, 2020, 107, 106334.
doi: 10.1016/j.ast.2020.106334 |
| 32 | 刘达, 赵暾, 张占月. 高超声速飞行器三通道耦合制导律与鲁棒控制律设计[J]. 战术导弹技术, 2023 (5): 97- 103,123. |
| LIU D, ZHAO T, ZHANG Z Y. A design of three-channel coupling guidance and robust control system for hypersonic vehicle[J]. Tactical Missile Technology, 2023 (5): 97- 103,123. |
| [1] | 黄迅, 陈柏屹, 彭寿勇, 刘燕斌, 杨犇, 庞浩然. 控制约束下的高超声速飞行器轨迹优化策略[J]. 系统工程与电子技术, 2025, 47(5): 1646-1654. |
| [2] | 黄绍洧, 都延丽, 刘燕斌, 王跃萍, 刘武. 有限时间收敛的自适应滑模协同末制导[J]. 系统工程与电子技术, 2025, 47(3): 961-969. |
| [3] | 朱金钊, 周荻, 陈晓波, 蔡明春. 临近空间高超声速飞行器快时变机动模型及轨迹预报[J]. 系统工程与电子技术, 2025, 47(1): 244-253. |
| [4] | 赵昱宇, 索超, 王雨潇. 基于微分平坦的高超声速飞行器跟踪控制方法[J]. 系统工程与电子技术, 2024, 46(3): 1084-1092. |
| [5] | 刘正洋, 周丽, 张瑞. 随机参数摄动下的高超声速飞行器姿态控制[J]. 系统工程与电子技术, 2024, 46(2): 703-714. |
| [6] | 杨平, 肖兵, 陈新, 唐璐琪. 多约束条件下战斗机三维路径规划问题[J]. 系统工程与电子技术, 2024, 46(12): 4213-4221. |
| [7] | 左仁伟, 李颖晖, 吕茂隆, 聂鸿雁. 动态自触发通信下多智能体输出反馈包容控制[J]. 系统工程与电子技术, 2024, 46(1): 345-356. |
| [8] | 董泽洪, 李颖晖, 吕茂隆, 李哲, 裴彬彬. 考虑输入受限的高超声速飞行器非奇异固定时间自适应切换控制[J]. 系统工程与电子技术, 2023, 45(5): 1476-1488. |
| [9] | 梁乐成, 赵斌, 周军, 赵万利. 部分约束下空中目标拦截制导控制一体化方法[J]. 系统工程与电子技术, 2023, 45(4): 1134-1143. |
| [10] | 彭谦, 郭建国, 郭宗易, 王国庆. 多约束多输入拦截器姿轨一体化复合控制[J]. 系统工程与电子技术, 2023, 45(3): 806-813. |
| [11] | 崔正达, 魏明英, 李运迁. 考虑阻力系数时变的下压段半解析时间预测方法[J]. 系统工程与电子技术, 2023, 45(2): 530-537. |
| [12] | 李君龙, 李松洲, 周荻. 一种多约束条件下的三脉冲交会优化设计方法[J]. 系统工程与电子技术, 2022, 44(8): 2612-2620. |
| [13] | 王冠, 茹海忠, 张大力, 马广程, 夏红伟. 弹性高超声速飞行器智能控制系统设计[J]. 系统工程与电子技术, 2022, 44(7): 2276-2285. |
| [14] | 胥涯杰, 鲜勇, 李邦杰, 任乐亮, 李少朋, 郭玮林. 基于神经网络的高超声速飞行器惯导系统精度提高方法[J]. 系统工程与电子技术, 2022, 44(4): 1301-1309. |
| [15] | 韦俊宝, 李海燕, 李静. 高超声速飞行器新型攻角约束反演控制[J]. 系统工程与电子技术, 2022, 44(4): 1310-1317. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||